
DETER-R: An Operational Near-Real Time Tropical Forest Disturbance Warning System Based on Sentinel-1 Time Series Analysis

 , , , , ,
, , , , ,  , , , and
, , , and
Abstract
:1. Introduction
2. Materials
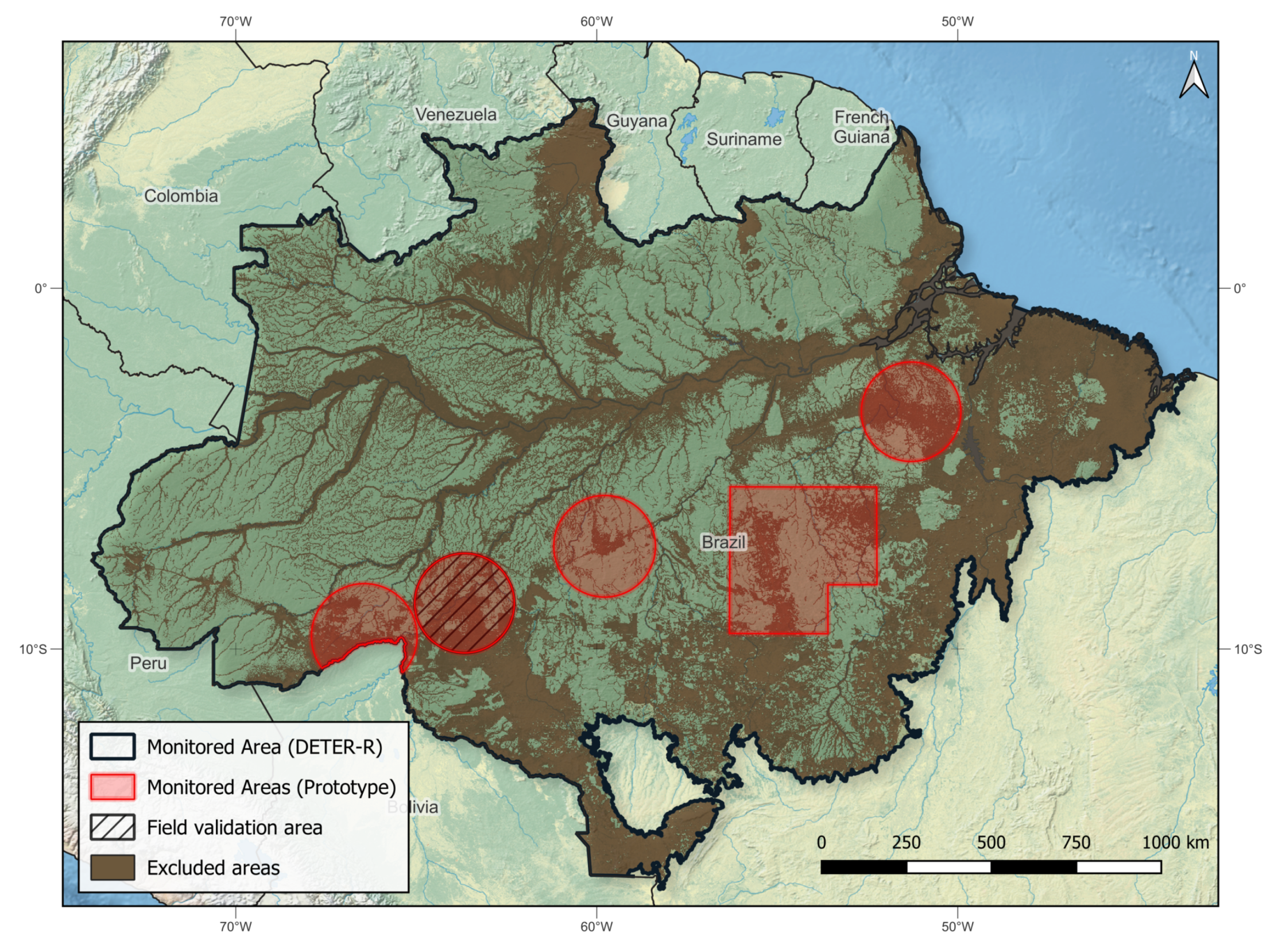
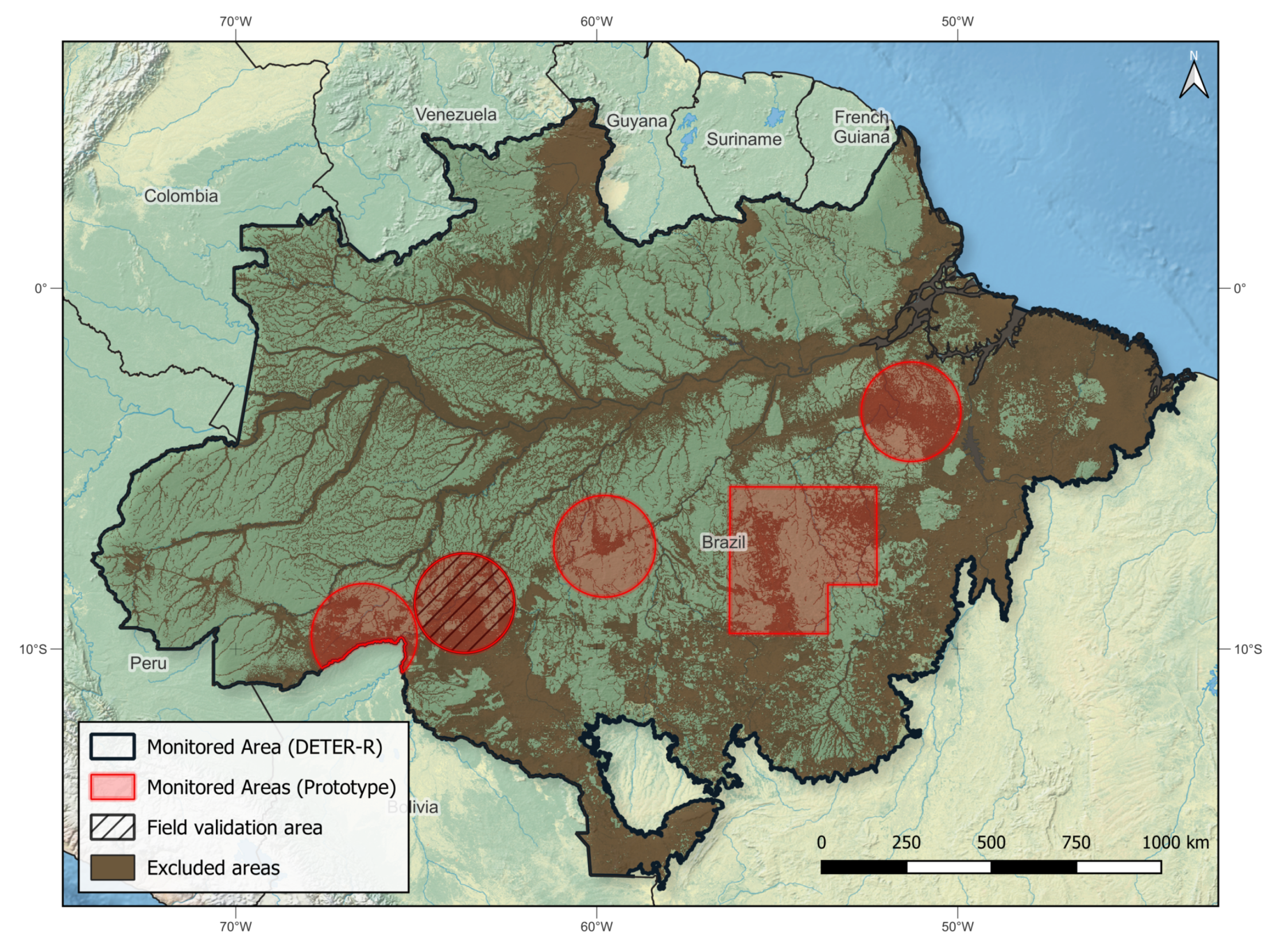
2.1. Project Area
2.2. SAR Images
- Orbit file correction: Updates orbit metadata with a restituted orbit file.
- GRD border noise removal: Removes low-intensity noise and invalid data on scene edges.
- Thermal noise removal: Removes additive noise in sub-swaths to help reduce discontinuities between sub-swaths for scenes in multi-swath acquisition modes.
- Radiometric calibration: Computes backscatter intensity using sensor calibration parameters in the GRD metadata.
- Terrain correction (orthorectification): Converts data from ground range geometry, which does not take terrain into account, to normalized backscatter coefficient using the Shuttle Radar Topography Mission (SRTM) 30 m Digital Elevation Models.
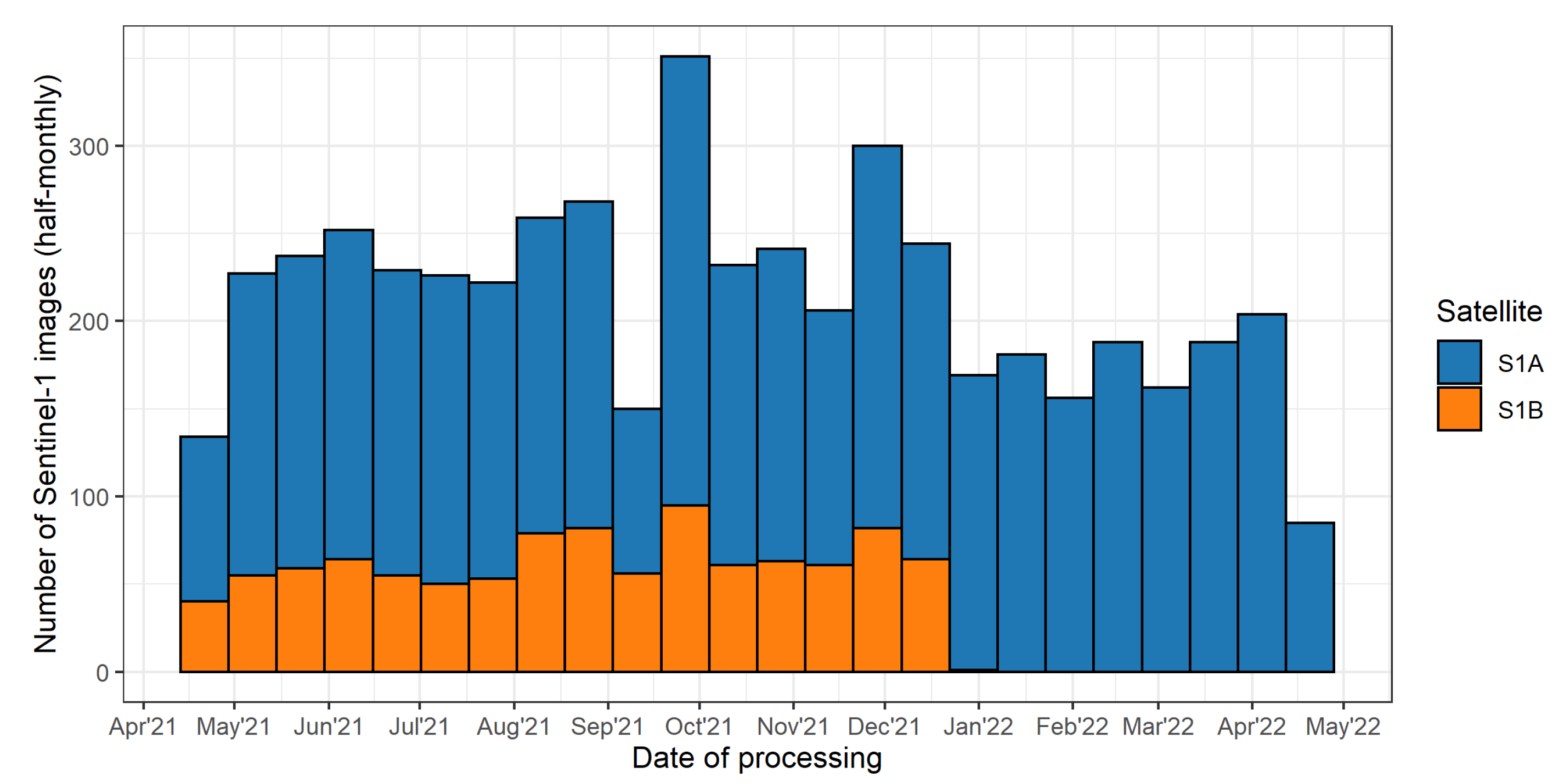
- During the first half of September 2021, issues with the image processing pipeline substantially reduced the availability of S1 images on the GEE platform. The images acquired during this period became available later in the same month.
- On 23 December 2021, a power supply-related issue prevented switching on the Sentinel-1B SAR acquisition subsystem. Further investigation did not succeed on fixing the compromised systems. Although the satellite is still orbiting normally, its operation is still stopped as of July 2022, and the future of the mission is uncertain. As a consequence of this incident, the mean number of images been made available over the DETER-R interest area dropped from 15.4 to 11.4 images/day.
2.3. Forest/Non-Forest Masks
- Deforestation map produced by the Program for Deforestation Monitoring in the Brazilian Legal Amazon (PRODES) [22]. This map is updated manually on DETER-R system every time the INPE/PRODES team issues an update. Normally this happens twice a year. The used map includes the residual (smaller than 6.25 ha) polygons which are not publicly available.
- INPE’s Forest/Non-forest map, built by visual interpretation. This medium resolution map outlines regional non-forest compounds, such as Roraima’s lavrados. This map is available at INPE’s terrabrasilis website (http://terrabrasilis.dpi.inpe.br/ (accessed on 18 January 2022)).
- The German Aerospace Center (Deutsches Zentrum für Luft-und Raumfahrt - DLR) Forest/Non-Forest map, built automatically using mainly TerraSAR-X data [23]. This map contributes to capture small features such as isolated outcrops and savanna patches among rainforest regions.
- Flooded and beach areas mapped by the Brazilian Institute of Geography and Statistics (IBGE) [26]. This ancillary layer will avoid false positives arising from seasonally flooding and coastline tidal variations.
2.4. Validation Imagery
- The Planet Basemaps Imagery, made available by the Norway’s International Climate & Forests Initiative (NICFI) program. Monthly and semiannual mosaics with 3 m spatial resolution are used, both in the visual and normalized analytic modes.
- Sentinel-2 images, freely distributed by ESA with 10 m spatial resolution and hosted on the Amazon Web Services (AWS). The two most recent images for each location at the time of analysis are used.
- The Landsat images selected and pre-processed by the PRODES team in the previous year. Pre-processing includes the application of contrast and color composition Short-wave infrared (R)/Near-infrared (G)/Red (B). Images are used with original 30 m spatial resolution.
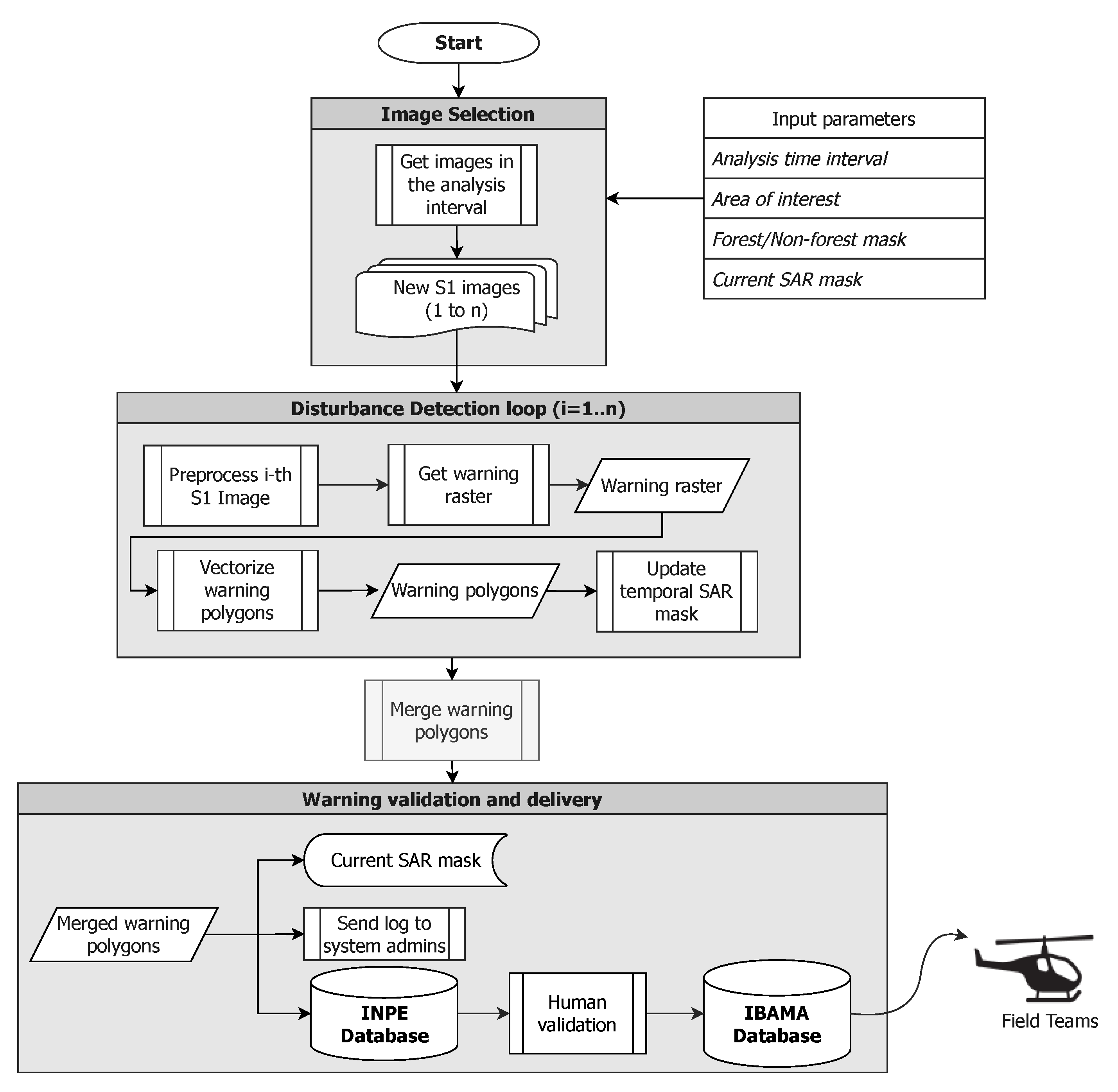
3. Methodology
3.1. Image Selection
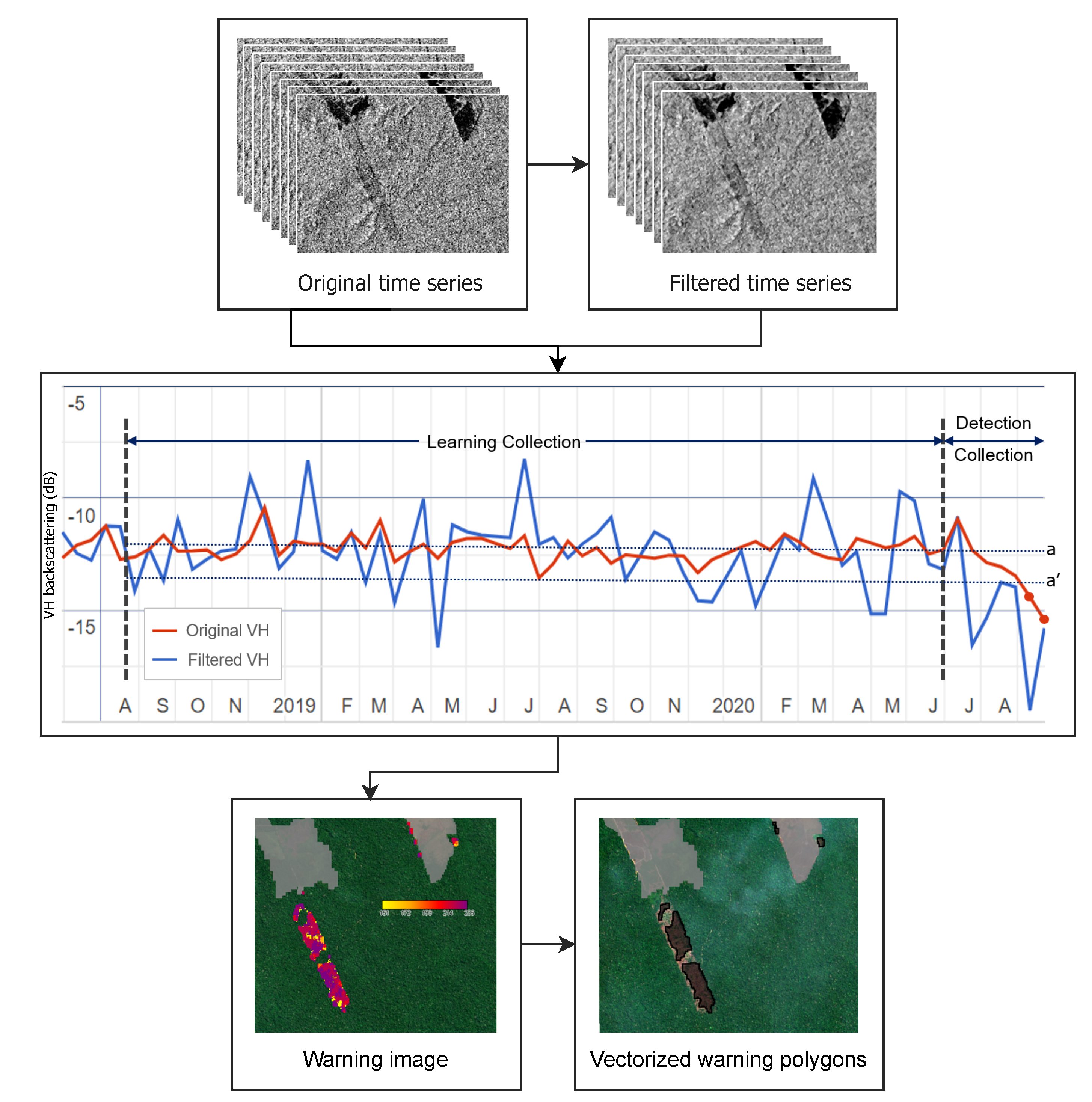
3.2. Disturbance Detection
3.2.1. Preprocessing
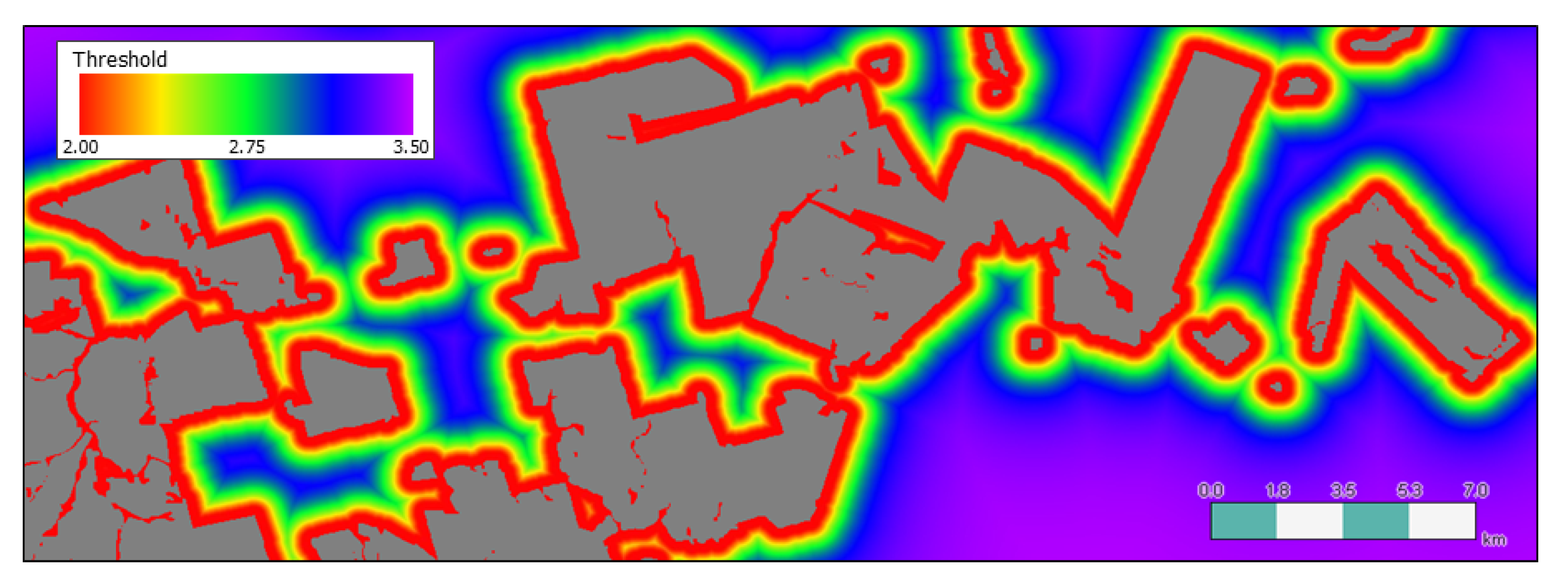
3.2.2. Computation of Warning Rasters
3.2.3. Warning Vectorization and Filtering
- Number of warnings: the mean value, across the polygon, of the total number of values below the threshold on the detection collection, computed for every pixel on the polygon.
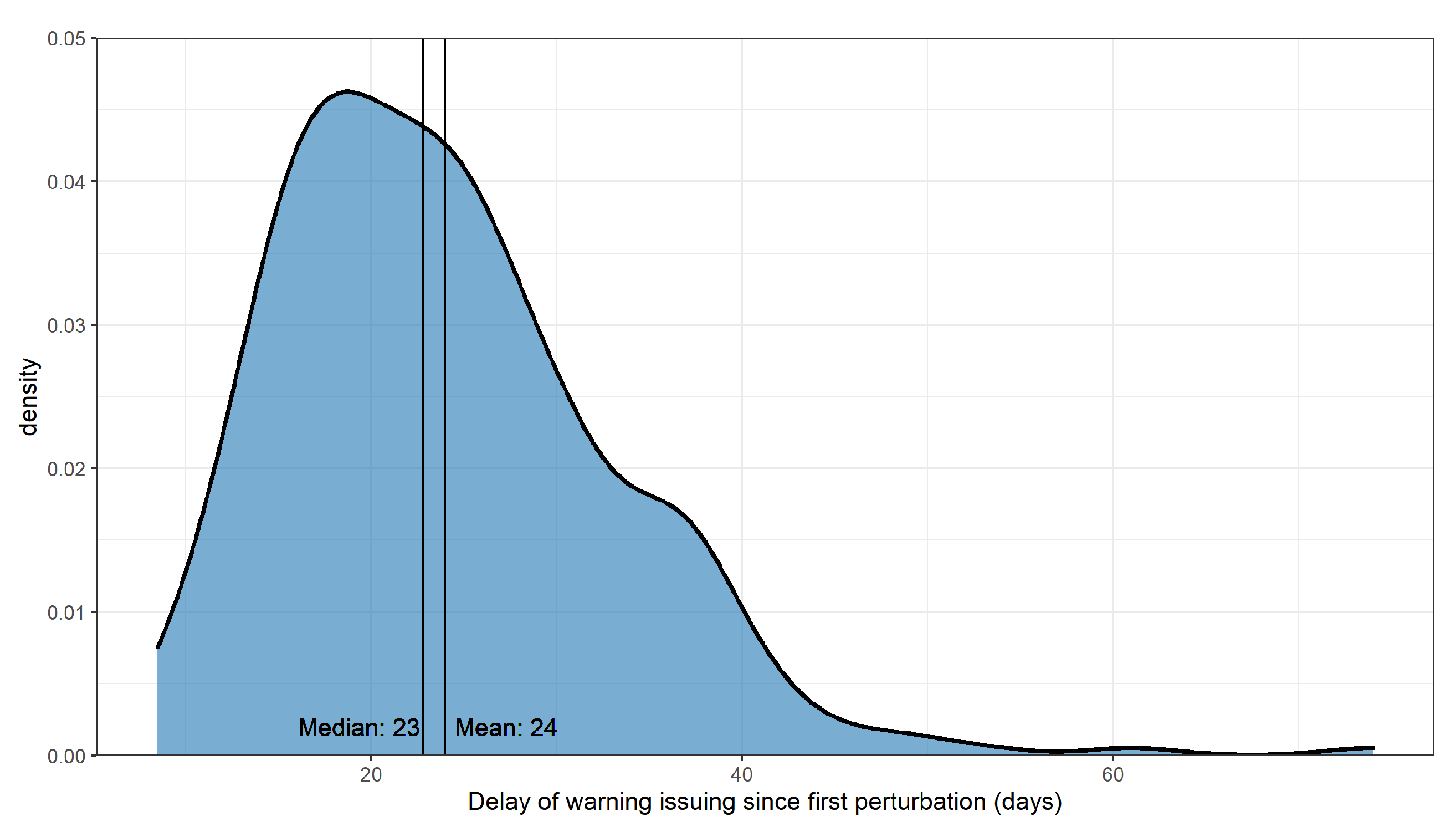
- Day of change: The mode of the Julian day corresponding to the first perturbation on the detection collection.
- Intensity of change: median value of the difference between the threshold and the minimum value of the detection collection.
- Number of warnings: Polygon mean must be higher than 1. A value of 1 means that this polygon pixels were flagged only once, and the polygon should be discarded. This procedure mainly aims to remove the anomalies related to convection clouds, which provoke sudden and dramatic drops on backscattering [9].
- Size of the warning polygon: Polygons smaller than the system MMU will be discarded. Although theoretically this threshold can be fixed to values as low as one single pixel area, such a reduced MMU will raise the number of warnings caused by small-scale or spurious events associated with moisture variations [32] or speckle. Already existing S1-based detection systems [14,17] fix their MMU to values around 0.1–0.2 ha, to reduce the amount of false positives while allowing the detection of small deforested patches. In our case, after discussion with the system main users and stakeholders we decided to use a MMU of 1 ha, in order to encompass the main objectives of the environmental teams’ field campaigns and their budgetary limitations.
3.2.4. Merging
3.3. Warnings Validation
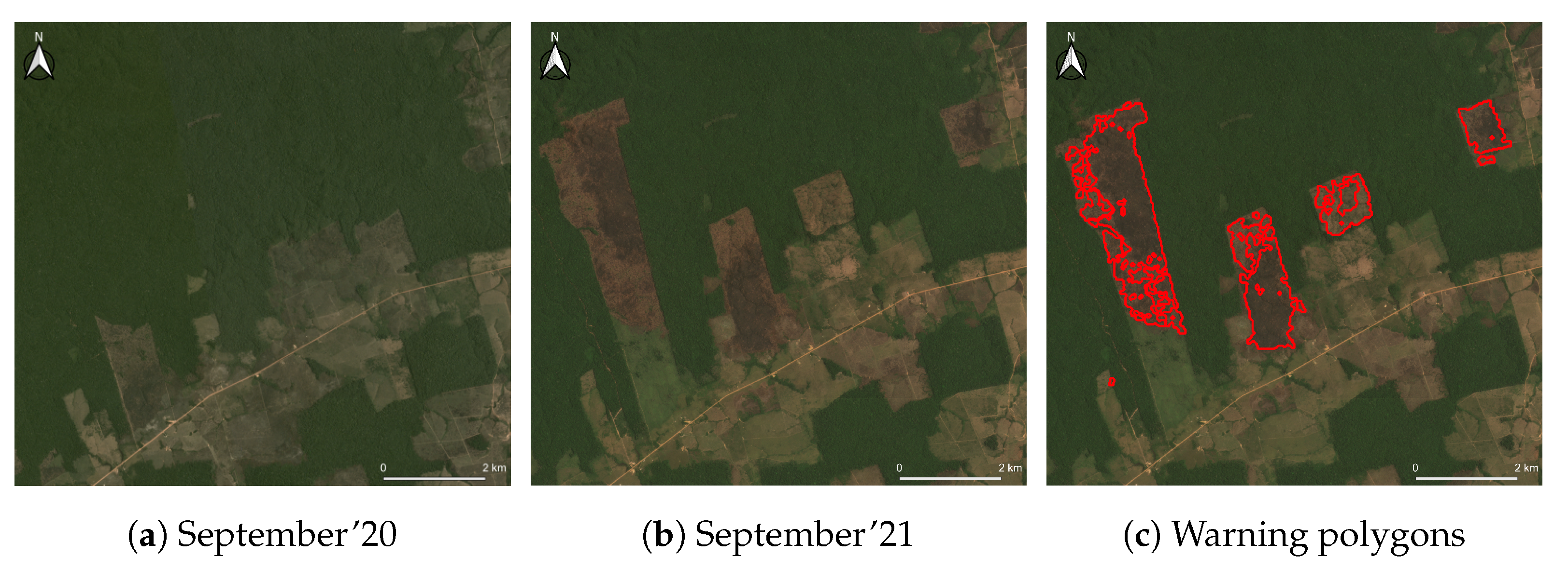
- Recent Deforestation: complete and recent removal of the forest cover due to clear-cut or as the result of successive disturbance events. A deforestation process is considered recent if it occurred within the year of the PRODES project (August to July).
- Recent Degradation: partial loss of forest canopy and consequent exposure of soil and/or understory vegetation.
- Burnt areas: forested areas impacted by fire. It may or may not contain arboreal vegetation.
- Residue: old deforestation process, i.e., complete removal of the forest cover that can be detected in the images used by PRODES in the previous year.
- Water-flooded areas: previously forested areas that have been flooded or engulfed by river dynamics. This class was only considered from mid-June 2021. Early validated warnings of this class were labeled as Non-forest formations.
- Non-forest formations: recent alterations occurring in areas not originally covered by forests.
- False positive: forested areas with no detectable forest disturbances.
- Cloud: warnings that could not be assessed due to clouds in the optical images used for validation.
- No reference data: areas that could not be evaluated due to the absence of recent optical images at the validation time.
- Agreement: warnings of forest disturbances correctly detected as High/Low Impact.
- Minor disagreement: warnings of forest disturbances incorrectly detected as High/Low Impact.
- Major disagreement: warnings that do not correspond to forest disturbances.
- Not Evaluated: warnings that could not be evaluated.
3.4. Warning Delivery
4. Results
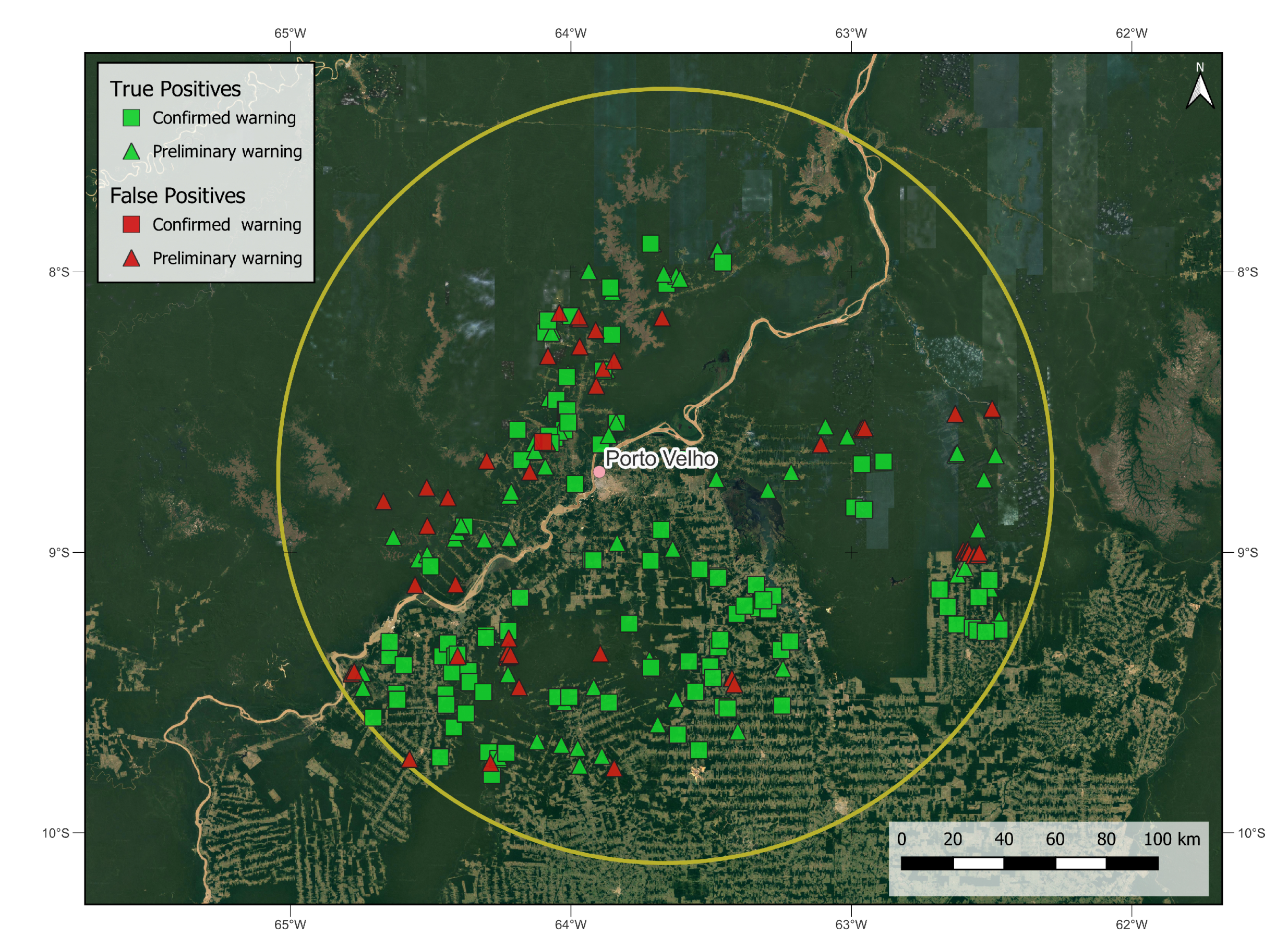
4.1. Preliminary Field Validation
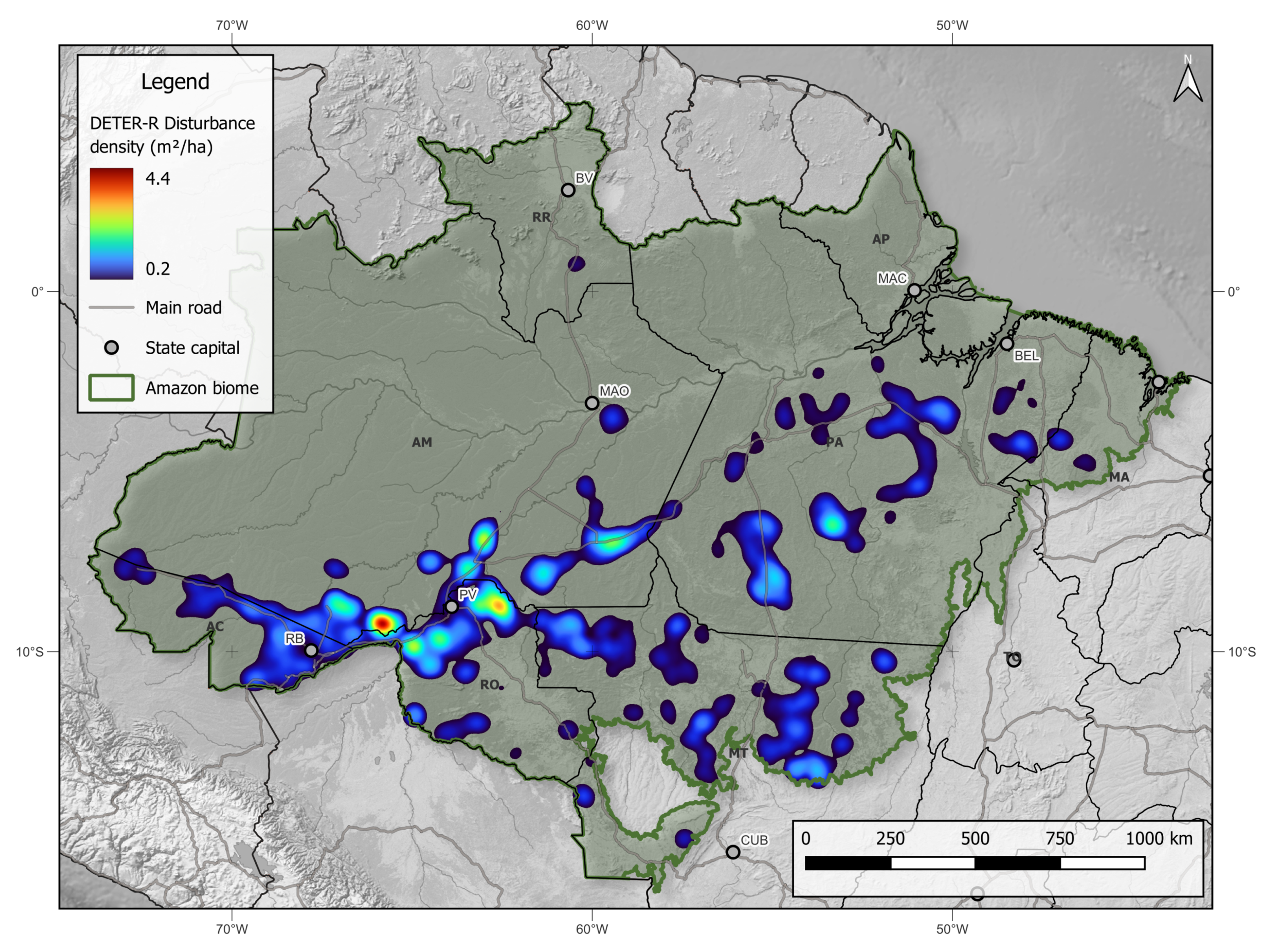
4.2. Forest Disturbance Warnings
4.3. Operational Validation
4.4. Delivered Warnings
5. Discussion
5.1. Differences among DETER-R and Other Operational NRT Systems
5.2. System Caveats
5.3. DETER-R Data as a Field Enforcement Tool
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Harris, N.L.; Gibbs, D.A.; Baccini, A.; Birdsey, R.A.; de Bruin, S.; Farina, M.; Fatoyinbo, L.; Hansen, M.C.; Herold, M.; Houghton, R.A.; et al. Global maps of twenty-first century forest carbon fluxes. Nat. Clim. Chang. 2021, 11, 234–240. [Google Scholar] [CrossRef]
- Gatti, L.V.; Basso, L.S.; Miller, J.B.; Gloor, M.; Gatti Domingues, L.; Cassol, H.L.; Tejada, G.; Aragão, L.E.; Nobre, C.; Peters, W.; et al. Amazonia as a carbon source linked to deforestation and climate change. Nature 2021, 595, 388–393. [Google Scholar] [CrossRef] [PubMed]
- WRI. Global Forest Review; WRI: Washington, DC, USA, 2021. [Google Scholar]
- Assunção, J.; Gandour, C.; Rocha, R. DETERring Deforestation in the Amazon: Environmental Monitoring and Law Enforcement; Climate Policy Initiative Report. 2019. Available online: https://www.climatepolicyinitiative.org/working-papers/deterring-deforestation-in-the-amazon-environmental-monitoring-and-law-enforcement/ (accessed on 1 May 2021).
- Finer, B.M.; Novoa, S.; Weisse, M.J.; Petersen, R.; Mascaro, J.; Souto, T.; Stearns, F.; Martinez, R.G. Combating deforestation: From satellite to intervention. Science (80-) 2018, 360, 1303–1305. [Google Scholar] [CrossRef] [PubMed]
- Diniz, C.G.; Souza, A.A.D.A.; Santos, D.C.; Dias, M.C.; Luz, N.C.D.; Moraes, D.R.V.D.; Maia, J.S.A.; Gomes, A.R.; Narvaes, I.D.S.; Valeriano, D.M.; et al. DETER-B: The New Amazon Near Real-Time Deforestation Detection System. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3619–3628. [Google Scholar] [CrossRef]
- Doblas, J.; Shimabukuro, Y.; Sant’anna, S.; Carneiro, A.; Aragão, L.; Almeida, C. Optimizing near real-time detection of deforestation on tropical rainforests using Sentinel-1 data. Remote Sens. 2020, 12, 3922. [Google Scholar] [CrossRef]
- Weisse, M.J.; Noguerón, R.; Eduardo, R.; Vicencio, V.; Castillo Soto, D.A. Use of Near-Real-Time Deforestation Alerts: A Case Study from Peru; Technical Report; WRI.ORG: Washington, DC, USA, 2019. [Google Scholar]
- Danklmayer, A.; Doring, B.R.J.; Schwerdt, M.; Chandra, M. Assessment of atmospheric propagation effects in SAR images. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3507–3518. [Google Scholar] [CrossRef]
- Watanabe, M.; Koyama, C.N.; Hayashi, M.; Nagatani, I.; Shimada, M. Early-stage deforestation detection in the tropics with L-band SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2127–2133. [Google Scholar] [CrossRef]
- Watanabe, M.; Koyama, C.N.; Hayashi, M.; Nagatani, I.; Tadono, T.; Shimada, M. Refined algorithm for forest early warning system with ALOS-2/PALSAR-2 ScanSAR data in tropical forest regions. Remote Sens. Environ. 2021, 265, 112643. [Google Scholar] [CrossRef]
- Reiche, J.; Verhoeven, R.; Verbesselt, J.; Hamunyela, E.; Wielaard, N.; Herold, M. Characterizing tropical forest cover loss using dense Sentinel-1 data and active fire alerts. Remote Sens. 2018, 10, 777. [Google Scholar] [CrossRef] [Green Version]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Reiche, J.; Mullissa, A.; Slagter, B.; Gou, Y.; Tsendbazar, N.E.; Odongo-Braun, C.; Vollrath, A.; Weisse, M.J.; Stolle, F.; Pickens, A.; et al. Forest disturbance alerts for the Congo Basin using Sentinel-1. Environ. Res. Lett. 2021, 16, 024005. [Google Scholar] [CrossRef]
- Bouvet, A.; Mermoz, S.; Ballère, M.; Koleck, T.; Le Toan, T. Use of the SAR Shadowing Effect for Deforestation Detection with Sentinel-1 Time Series. Remote Sens. 2018, 10, 1250. [Google Scholar] [CrossRef] [Green Version]
- Ballère, M.; Bouvet, A.; Mermoz, S.; Le Toan, T.; Koleck, T.; Bedeau, C.; André, M.; Forestier, E.; Frison, P.L.; Lardeux, C. SAR data for tropical forest disturbance alerts in French Guiana: Benefit over optical imagery. Remote Sens. Environ. 2021, 252, 112159. [Google Scholar] [CrossRef]
- Mermoz, S.; Bouvet, A.; Koleck, T.; Ballère, M.; Le Toan, T. Continuous Detection of Forest Loss in Vietnam, Laos, and Cambodia Using Sentinel-1 Data. Remote Sens. 2021, 13, 4877. [Google Scholar] [CrossRef]
- Greidanus, H.; Alvarez, M.; Santamaria, C.; Thoorens, F.X.; Kourti, N.; Argentieri, P. The SUMO Ship Detector Algorithm for Satellite Radar Images. Remote Sens. 2017, 9, 246. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Zhang, H.; Wang, Y.; Wang, X.; Xue, S.; Liu, W. Dynamic detection of offshore wind turbines by spatial machine learning from spaceborne synthetic aperture radar imagery. J. King Saud Univ.-Comput. Inf. Sci. 2022, 34, 1674–1686. [Google Scholar] [CrossRef]
- Touzi, R.; Lopes, A.; Bousquet, P. A statistical and geometrical edge detector for SAR images. IEEE Trans. Geosci. Remote Sens. 1988, 26, 764–773. [Google Scholar] [CrossRef]
- Sano, E.E.; Rizzoli, P.; Koyama, C.N.; Watanabe, M.; Adami, M.; Shimabukuro, Y.E.; Bayma, G.; Freitas, D.M. Comparative analysis of the global forest/non-forest maps derived from sar and optical sensors. Case studies from brazilian amazon and cerrado biomes. Remote Sens. 2021, 13, 367. [Google Scholar] [CrossRef]
- Monitoramento do Desmatamento da Floresta Amazônica Brasileira por Satélite. 2022. Available online: http://www.obt.inpe.br/OBT/assuntos/programas/amazonia/prodes (accessed on 2 May 2022).
- Martone, M.; Rizzoli, P.; Wecklich, C.; González, C.; Bueso-Bello, J.L.; Valdo, P.; Schulze, D.; Zink, M.; Krieger, G.; Moreira, A. The global forest/non-forest map from TanDEM-X interferometric SAR data. Remote Sens. Environ. 2018, 205, 352–373. [Google Scholar] [CrossRef]
- Melack, J.M.; Hess, L.L. Remote Sensing of the Distribution and Extent of Wetlands in the Amazon Basin. In Amazonian Floodplain Forests: Ecophysiology, Biodiversity and Sustainable Management; Junk, W.J., Piedade, M.T.F., Wittmann, F., Schöngart, J., Parolin, P., Eds.; Springer: Dordrecht, The Netherlands, 2011; pp. 43–59. [Google Scholar] [CrossRef]
- Rennó, C.D.; Novo, E.M.; Banon, L.C. Correção geométrica da máscara de áreas alagáveis da bacia amazônica. In Proceedings of the Anais XVI Simpósio Brasileiro de Sensoriamento Remoto, Foz do Iguaçu, Brasil, 13–18 April 2013; pp. 5507–5514. [Google Scholar]
- Diretoria de Geociências (IBGE/DGC). Base temática Vetorial 1:250.000—Brasil—Geomorfologia – Área; Technical Report; Coordenação de Recursos Naturais e Estudos Ambientais—CREN (IBGE): Rio de Janeiro, Brazil, 2018. [Google Scholar]
- Vollrath, A.; Mullissa, A.; Reiche, J. Angular-based radiometric slope correction for Sentinel-1 on google earth engine. Remote Sens. 2020, 12, 1867. [Google Scholar] [CrossRef]
- Quegan, S.; Yu, J.J. Filtering of multichannel SAR images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2373–2379. [Google Scholar] [CrossRef]
- Doblas, J.; Frery, A.C.; Sant’Anna, S.J.S.; Carneiro, A.; Shimabukuro, Y.E. Assessment of Nonlocal Means Stochastic Distances Speckle Reduction for SAR Time Series. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 3265–3268. [Google Scholar] [CrossRef]
- Lee, J.S. Refined filtering of image noise using local statistics. Comput. Graph. Image Process. 1981, 15, 380–389. [Google Scholar] [CrossRef]
- Lee, J.S. Speckle analysis and smoothing of synthetic aperture radar images. Comput. Graph. Image Process. 1981, 17, 24–32. [Google Scholar] [CrossRef]
- Benninga, H.J.F.; van der Velde, R.; Su, Z. Impacts of Radiometric Uncertainty and Weather-Related Surface Conditions on Soil Moisture Retrievals with Sentinel-1. Remote Sens. 2019, 11, 2025. [Google Scholar] [CrossRef] [Green Version]
- Doblas, J.; Carneiro, A.; Shimabukuro, Y.; Sant’anna, S.; Aragão, L.; Pereira, F.R. Stabilization of sentinel-1 sar time-series using climate and forest structure data for early tropical deforestation detection. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 5, 89–96. [Google Scholar] [CrossRef]
- Nunes, M.H.; Camargo, J.L.C.; Vincent, G.; Calders, K.; Oliveira, R.S.; Huete, A.; Mendes de Moura, Y.; Nelson, B.; Smith, M.N.; Stark, S.C.; et al. Forest fragmentation impacts the seasonality of Amazonian evergreen canopies. Nat. Commun. 2022, 13, 1–10. [Google Scholar] [CrossRef]
- Delignette-Muller, M.L.; Dutang, C. fitdistrplus: An R Package for Fitting Distributions. J. Stat. Softw. 2015, 64, 1–34. [Google Scholar] [CrossRef] [Green Version]
- Maurano, L.E.; Adami, M. Ferramentas Web-Gis para avaliar exatidão de mapeamento de uso e cobertura da terra no Cerrado brasileiro. In Proceedings of the Anais XVIII Simpósio Brasileiro de Sensoriamento Remoto, São Paulo, Brazil, 28–31 May 2017; pp. 462–469. [Google Scholar]
- Alencar, A.; Silvestrini, R.; Gomes, J.; Savian, G. Amazon in Flames: The New and Alarming Level of Deforestation in the Amazon; Technical Report 9; IPAM: Brasília, Brazil, 2022. [Google Scholar]
- Hansen, M.C.; Krylov, A.; Tyukavina, A.; Potapov, P.V.; Turubanova, S.; Zutta, B.; Ifo, S.; Margono, B.; Stolle, F.; Moore, R. Humid tropical forest disturbance alerts using Landsat data. Environ. Res. Lett. 2016, 11, 034008. [Google Scholar] [CrossRef]
- Doblas, J.; Lima, L.; Mermoz, S.; Bouvet, A.; Reiche, J.; Watanabe, M.; Sant’Anna, S.; Shimabukuro, Y. Inter-comparison of optical and SAR-based forest disturbance warning systems in the Amazon shows the potential of combined SAR-optical monitoring. Int. J. Remote Sens. 2022. submitted. [Google Scholar]
- Pickens, A.; Hansen, M.; Adusei, B.; Potapov, P. Sentinel-2 Forest Loss Alerts; WRI.ORG: Washington, DC, USA, 2020. [Google Scholar]
- Doblas, J.; Carneiro, A.; Shimabukuro, Y.; Sant’Anna, S.; Aragão, L. Assessment of rainfall influence on sentinel-1 time series on amazonian tropical forests aiming deforestation detection improvement. In Proceedings of the 2020 IEEE Latin American GRSS & ISPRS Remote Sensing Conference (LAGIRS), Santiago, Chile, 22–27 March 2020; pp. 397–402. [Google Scholar] [CrossRef]
- Silva, C.A.; Guerrisi, G.; Del Frate, F.; Sano, E.E. Near-real time deforestation detection in the Brazilian Amazon with Sentinel-1 and neural networks. Eur. J. Remote Sens. 2022, 55, 129–149. [Google Scholar] [CrossRef]
- Zhu, X.X.; Montazeri, S.; Ali, M.; Hua, Y.; Wang, Y.; Mou, L.; Shi, Y.; Xu, F.; Bamler, R. Deep Learning Meets SAR: Concepts, models, pitfalls, and perspectives. IEEE Geosci. Remote Sens. Mag. 2021, 9, 143–172. [Google Scholar] [CrossRef]
- Ortega Adarme, M.; Doblas Prieto, J.; Queiroz Feitosa, R.; De Almeida, C.A. Improving Deforestation Detection on Tropical Rainforests Using Sentinel-1 Data and Convolutional Neural Networks. Remote Sens. 2022, 14, 3290. [Google Scholar] [CrossRef]
- Hethcoat, M.G.; Carreiras, J.M.B.; Bryant, R.G.; Quegan, S.; Edwards, D.P. Combining Sentinel-1 and Landsat 8 Does Not Improve Classification Accuracy of Tropical Selective Logging. Remote Sens. 2022, 14, 179. [Google Scholar] [CrossRef]
- Ferrante, L.; De Andrade, M.B.T.; Leite, L.; Silva, C.A.; Lima, M.; Coelho, M.G.; Da Silva Neto, E.C.; Campolina, D.; Carolino, K.; Diele-Viegas, L.M.; et al. Brazils highway BR-319: The road to the collapse of the Amazon and the violation of indigenous rights. Erde 2021, 152, 65–70. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Validation Class | Detection Class | |
|---|---|---|
| High Intensity | Low Intensity | |
| Automatic (deforestation) | Agreement | Minor disagreement |
| Recent Deforestation | Agreement | Minor disagreement |
| Recent Degradation | Minor disagreement | Agreement |
| Burnt areas | Minor disagreement | Agreement |
| Residue | Minor disagreement | Minor disagreement |
| Water-flooded areas | Major disagreement | Major disagreement |
| Non-forest formations | Major disagreement | Major disagreement |
| False positive | Major disagreement | Major disagreement |
| Cloud | Not evaluated | Not evaluated |
| No reference data | Not evaluated | Not evaluated |
| Validation Class | Detected Polygons | Detected Area (ha) | ||
|---|---|---|---|---|
| High Intensity | Low Intensity | High Intensity | Low Intensity | |
| Automatic (deforestation) | 33,933 (39.7) | 12,980 (15.2) | 288,798.8 (63.9) | 32,482.9 (7.2) |
| Recent Deforestation | 23,060 (26.9) | 6443 (7.5) | 77,899.3 (17.2) | 12,815.4 (2.8) |
| Recent Degradation | 460 (0.5) | 670 (0.8) | 1214.0 (0.3) | 1349.3 (0.3) |
| Burnt areas | 1322 (1.5) | 1859 (2.2) | 17,550.6 (3.9) | 5771.3 (1.3) |
| Residue | 1580 (1.8) | 462 (0.5) | 2619.8 (0.6) | 697.6 (0.2) |
| Water-flooded areas | 126 (0.1) | 11 (<0.1) | 170.5 (<0.1) | 20.1 (<0.1) |
| Non-forest formations | 449 (0.5) | 194 (0.2) | 1535.0 (0.3) | 393.2 (0.1) |
| False positive | 224 (0.3) | 119 (0.1) | 434.7 (0.1) | 233.1 (0.1) |
| Cloud | 467 (0.5) | 165 (0.2) | 3527.4 (0.8) | 360.0 (0.1) |
| No reference data | 737 (0.9) | 319 (0.4) | 2997.1 (0.7) | 898.6 (0.2) |
| Agreement | 59,522 (69.6) | 378,818.6 (82.7) | ||
| Minor disagreement | 23,237 (27.2) | 67,380.2 (14.9) | ||
| Major disagreement | 1123 (1.3) | 2786.5 (0.6) | ||
| Not evaluated | 1688 (2.0) | 7783.0 (1.7) | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Doblas, J.; Reis, M.S.; Belluzzo, A.P.; Quadros, C.B.; Moraes, D.R.V.; Almeida, C.A.; Maurano, L.E.P.; Carvalho, A.F.A.; Sant’Anna, S.J.S.; Shimabukuro, Y.E. DETER-R: An Operational Near-Real Time Tropical Forest Disturbance Warning System Based on Sentinel-1 Time Series Analysis. Remote Sens. 2022, 14, 3658. https://doi.org/10.3390/rs14153658
Doblas J, Reis MS, Belluzzo AP, Quadros CB, Moraes DRV, Almeida CA, Maurano LEP, Carvalho AFA, Sant’Anna SJS, Shimabukuro YE. DETER-R: An Operational Near-Real Time Tropical Forest Disturbance Warning System Based on Sentinel-1 Time Series Analysis. Remote Sensing. 2022; 14(15):3658. https://doi.org/10.3390/rs14153658
Chicago/Turabian StyleDoblas, Juan, Mariane S. Reis, Amanda P. Belluzzo, Camila B. Quadros, Douglas R. V. Moraes, Claudio A. Almeida, Luis E. P. Maurano, André F. A. Carvalho, Sidnei J. S. Sant’Anna, and Yosio E. Shimabukuro. 2022. "DETER-R: An Operational Near-Real Time Tropical Forest Disturbance Warning System Based on Sentinel-1 Time Series Analysis" Remote Sensing 14, no. 15: 3658. https://doi.org/10.3390/rs14153658
APA StyleDoblas, J., Reis, M. S., Belluzzo, A. P., Quadros, C. B., Moraes, D. R. V., Almeida, C. A., Maurano, L. E. P., Carvalho, A. F. A., Sant’Anna, S. J. S., & Shimabukuro, Y. E. (2022). DETER-R: An Operational Near-Real Time Tropical Forest Disturbance Warning System Based on Sentinel-1 Time Series Analysis. Remote Sensing, 14(15), 3658. https://doi.org/10.3390/rs14153658