
KASiam: Keypoints-Aligned Siamese Network for the Completion of Partial TLS Point Clouds



Abstract
:1. Introduction
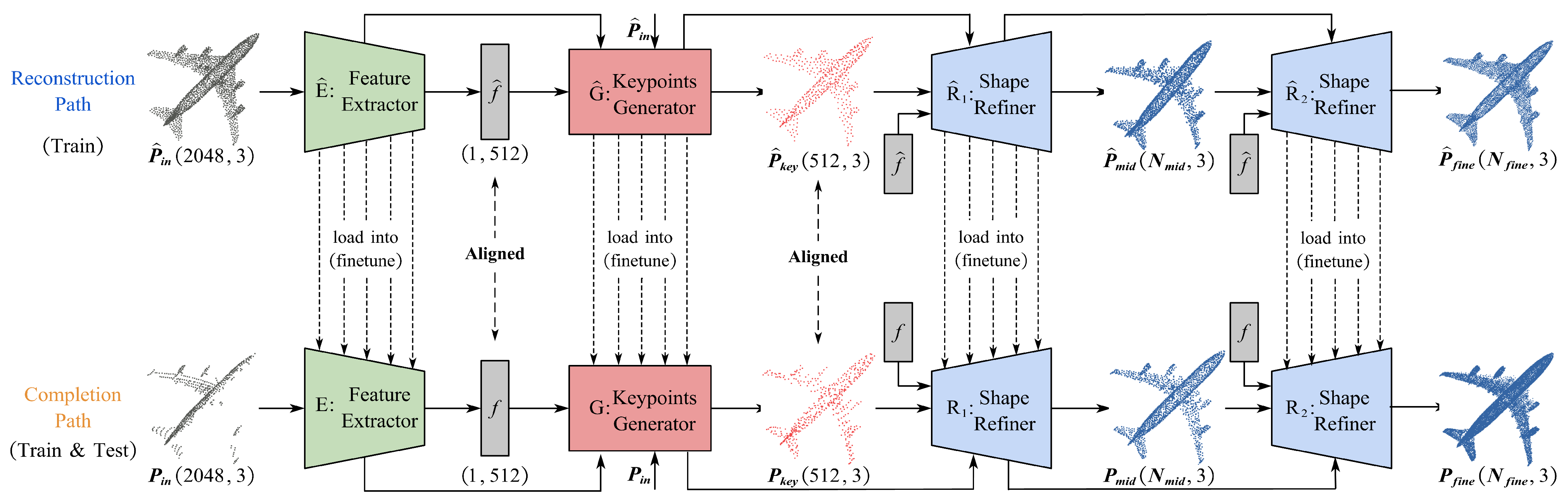
- We propose the KASiam network for point cloud completion. KASiam has dual input paths of reconstruction and completion, which interact geometric features with each other through keypoints alignment of complete-partial pairs. The dual path structure takes sufficient advantage of input data and is crucial for the completion task.
- We propose CAP and SAA blocks, which weaken the explicit local feature extractions and replace KNN with per-point attention mechanisms, to make the network able to learn geometric relationships precisely in an implicit manner.
- Experimental results and analyses demonstrate that KASiam achieves the state-of-the-art point cloud completion performance, outperforms existing methods by at least a 4.72% reduction of the average Chamfer Distance of categories in PCN dataset especially and can generate finer shapes of point clouds on partial TLS data.
2. Related Work
2.1. Point Cloud Features Exploitation
2.2. Point Cloud Completion
2.3. Evaluation on Point Cloud Completion
3. Method
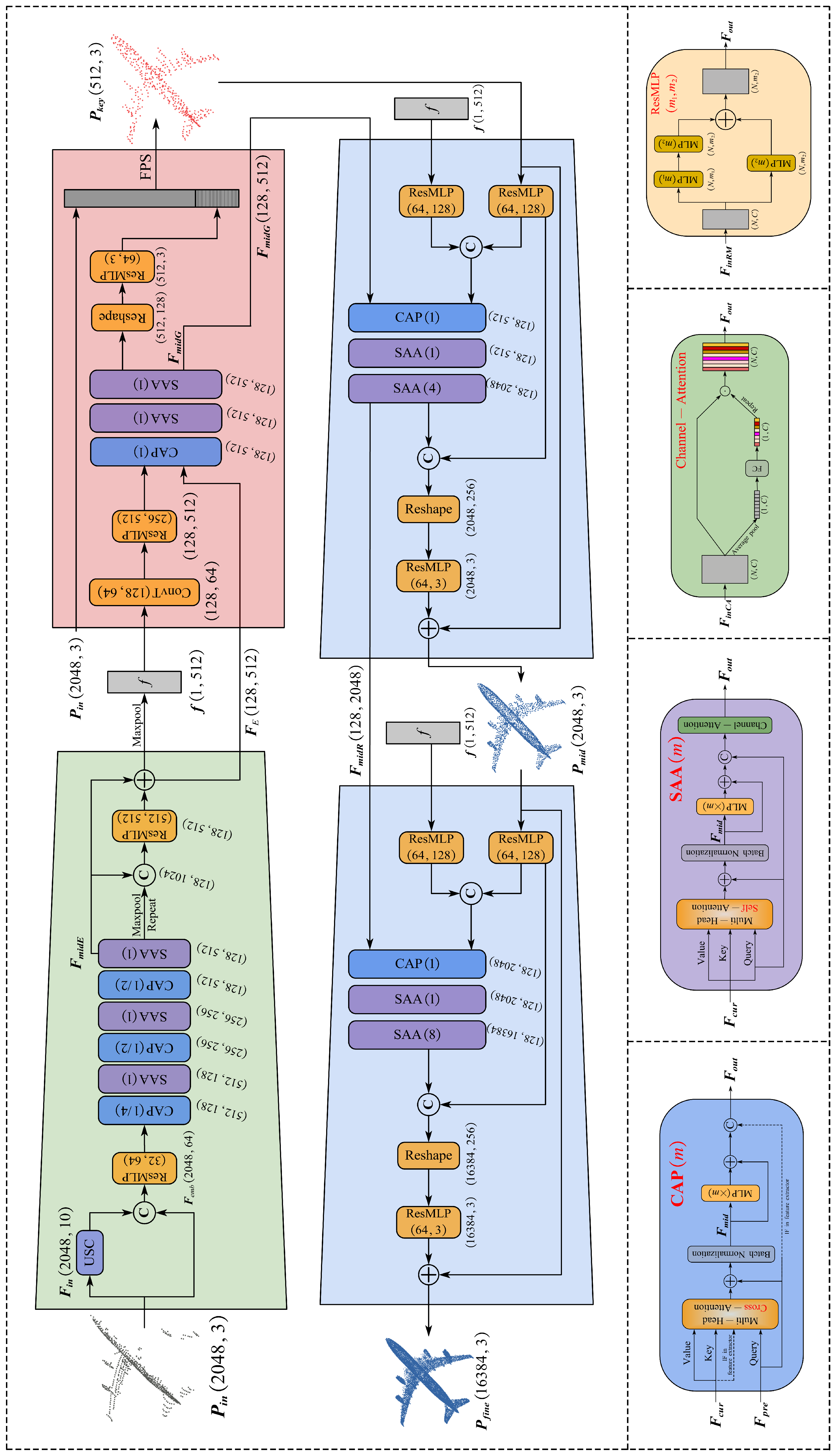
3.1. Overall Architecture
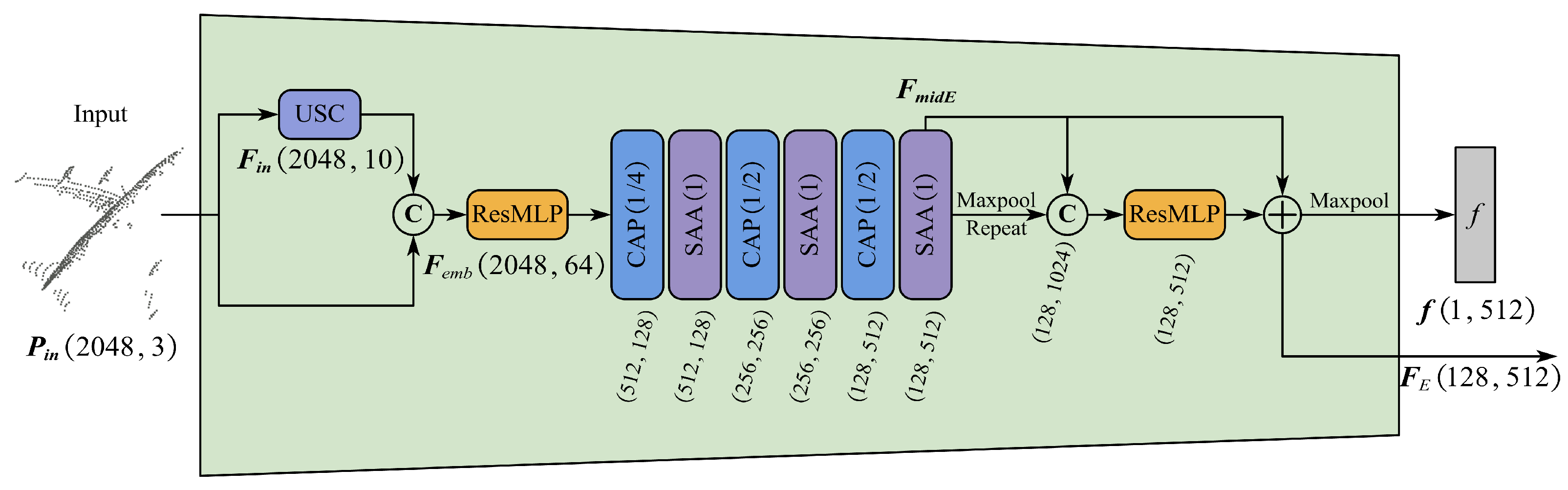
3.2. Feature Extractor
3.3. Keypoint Generator
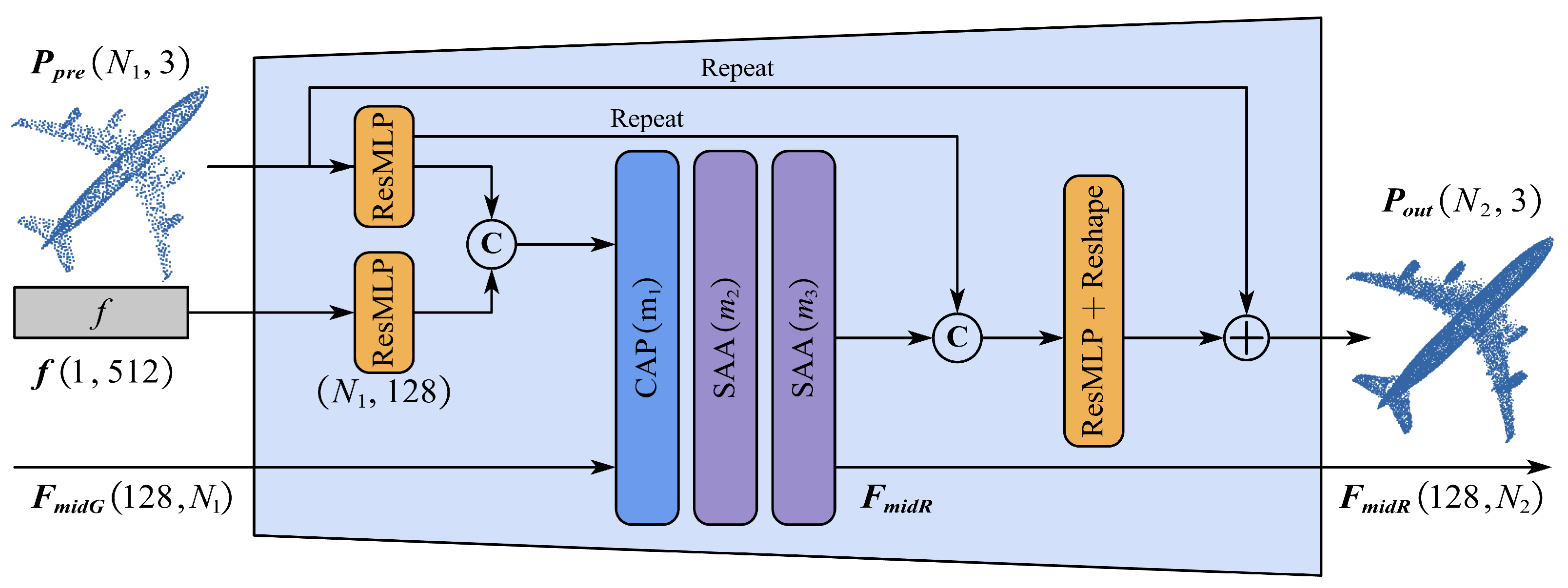
3.4. Shape Refiner
3.5. Cross-Attention Perception and Self-Attention Augment
3.5.1. Cross-Attention Perception Block
3.5.2. Self-attention Augment Block
3.6. Training Loss
3.6.1. Loss in the Reconstruction Path
3.6.2. Loss in Completion Path
4. Experiments and Results
4.1. Datasets and Implementation Details
4.2. Results on the PCN Dataset
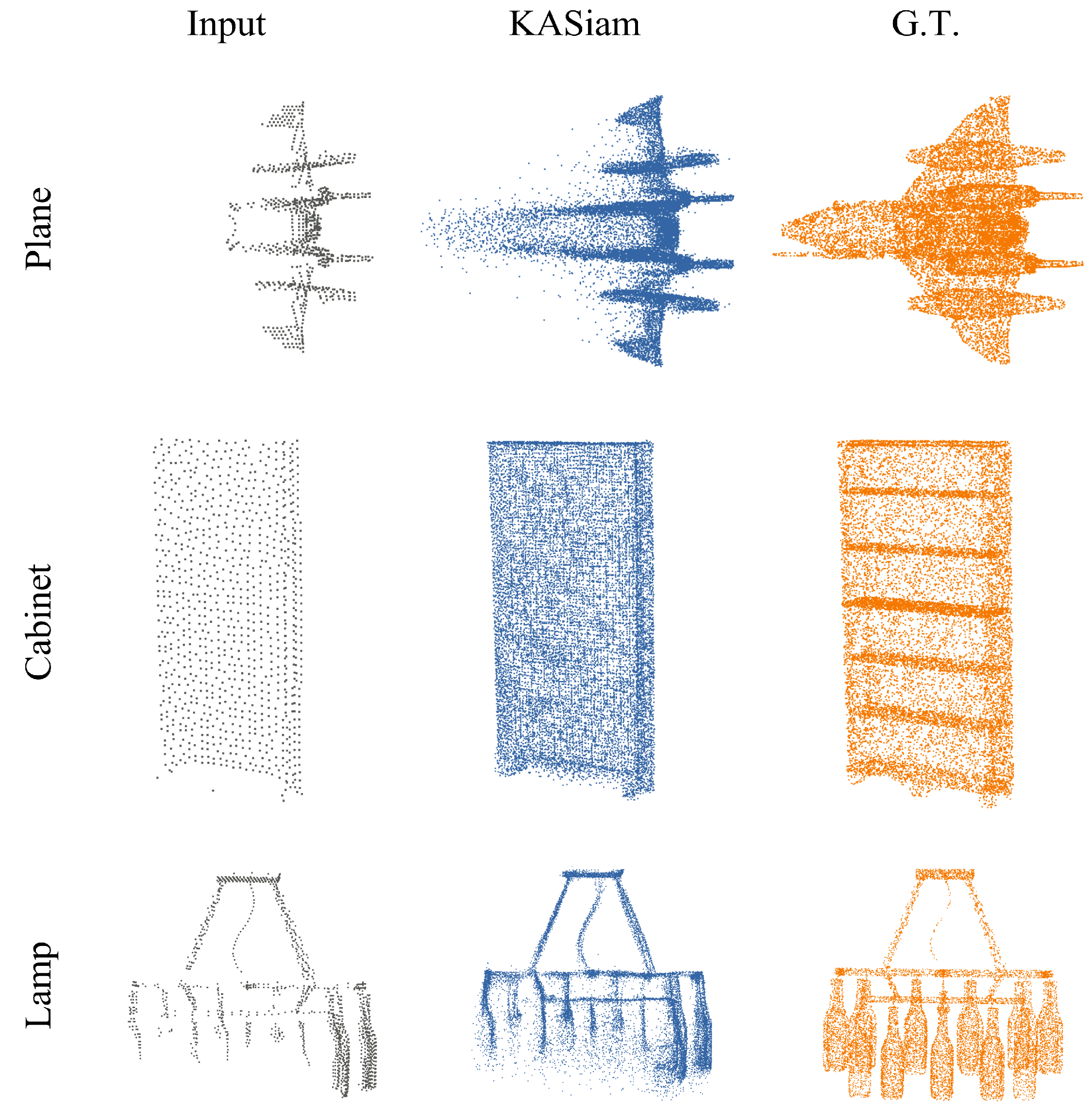
4.3. Results on the TLS Data
4.4. Ablation Studies and Analyses
- Variation . To examine the effectiveness of USC block for point cloud generations, we remove the USC block and send the input point cloud to the layer of position embedding directly.
- Variation . To examine the effectiveness of CAP blocks in the feature extractor module, we replace all the CAP blocks in the feature extractor with layers of PointNet++ [16].
- Variation . To examine the effectiveness of SAA blocks in the feature extractor module, we remove all the SAA blocks in the feature extractor and connect the stacked CAPs directly.
- Variation . To examine the effectiveness of CA blocks in the feature extractor module, we remove all the CA blocks in the SAA blocks, while the other structures of the network remain unchanged.
- Variation . To examine the effectiveness of the shape refiner modules for point cloud generations, we replace all shape refiner modules with the generation operation based on FoldingNet [32].
4.4.1. Visualization Analysis of Attention Mechanisms on Point Clouds
4.4.2. Visualization Analysis of the Keypoints Alignment Operation
4.4.3. Visualization analysis of the Shape Refiners
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Network Details
References
- Guo, Y.; Wang, H.; Hu, Q.; Liu, H.; Liu, L.; Bennamoun, M. Deep Learning for 3D Point Clouds: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 4338–4364. [Google Scholar] [CrossRef] [PubMed]
- Angela, D.; Charles, R.Q.; Matthias, N. Shape Completion Using 3D-Encoder-Predictor CNNs and Shape Synthesis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6545–6554. [Google Scholar]
- Xie, H.; Yao, H.; Zhou, S.; Mao, J.; Sun, W. GRNet: Gridding Residual Network for Dense Point Cloud Completion. In Proceedings of the European Conference on Computer Vision, Glasgow, Scotland, 23–28 August 2020; pp. 365–381. [Google Scholar]
- Wang, X.; Marcelo, H.; Gim, H.L. Voxel-based Network for Shape Completion by Leveraging Edge Generation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, Canada, 11–17 October 2021; pp. 13169–13178. [Google Scholar]
- Wang, Y.; Tejas, K.; David, H.; Christoph, M.; Martial, H. PCN: Point Completion Network. In Proceedings of the International Conference on 3D Vision, Verona, Italy, 5–8 September 2018; pp. 728–737. [Google Scholar]
- Charles, R.Q.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 77–85. [Google Scholar]
- Tchapmi, L.P.; Kosaraju, V.; Reid, I.; Savarese, S. TopNet: Structural Point Cloud Decoder. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 15–21 June 2019; pp. 383–392. [Google Scholar]
- Zhang, W.; Yan, Q.; Xiao, C. Detail Preserved Point Cloud Completion via Separated Feature Aggregation. In Proceedings of the European Conference on Computer Vision, Glasgow, Scotland, 23–28 August 2020; pp. 512–528. [Google Scholar]
- Wang, X.; Marcelo, H.; Gim, H.L. Cascaded Refinement Network for Point Cloud Completion. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seattle, WA, USA, 14–19 June 2020; pp. 787–796. [Google Scholar]
- Xiang, P.; Wen, X.; Liu, Y.; Cao, Y.; Wan, P.; Zheng, W.; Han, Z. SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–17 October 2021; pp. 5479–5489. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is all you need. In Proceedings of the International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 6000–6010. [Google Scholar]
- Yu, X.; Rao, Y.; Wang, Z.; Liu, Z.; Lu, J.; Zhou, J. PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, Canada, 11–17 October 2021; pp. 12478–12487. [Google Scholar]
- Xia, Y.; Xia, Y.; Li, W.; Song, R.; Cao, K.; Stilla, U. ASFM-Net: Asymmetrical Siamese Feature Matching Network for Point Completion. In Proceedings of the ACM Multimedia Conference, Chengdu, China, 20–24 October 2021; pp. 1938–1947. [Google Scholar]
- Pan, L.; Chen, X.; Cai, Z.; Zhang, J.; Zhao, H.; Liu, Z. Variational Relational Point Completion Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Online, 19–25 June 2021; pp. 8520–8529. [Google Scholar]
- Liu, X.; Xu, G.; Xu, K.; Wan, J.; Ma, Y. Point cloud completion by dynamic transformer with adaptive neighbourhood feature fusion. IET Comput. Vis. 2022, 1, 1–13. [Google Scholar] [CrossRef]
- Charles, R.Q.; Li, Y.; Su, H.; Guibas, L.J. PointNet++: Deep hierarchical feature learning on point sets in a metric space. In Proceedings of the International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 5105–5114. [Google Scholar]
- Ma, X.; Qin, C.; You, H.; Ran, H.; Fu, Y. Rethinking Network Design and Local Geometry in Point Cloud: A Simple Residual MLP Framework. In Proceedings of the International Conference on Learning Representations, Online, 25–29 April 2022. [Google Scholar]
- Ran, H.; Liu, J.; Wang, C. Surface Representation for Point Clouds. arXiv 2022, arXiv:2205.05740. [Google Scholar]
- Li, Y.; Bu, R.; Sun, M.; Wu, W.; Di, X.; Chen, B. PointCNN: Convolution On X-Transformed Points. arXiv 2018, arXiv:1801.07791. [Google Scholar]
- Wu, W.; Qi, Z.; Li, F. PointConv: Deep Convolutional Networks on 3D Point Clouds. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–21 June 2019; pp. 9613–9622. [Google Scholar]
- Xu, M.; Ding, R.; Zhao, H.; Qi, X. PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Online, 19–25 June 2021; pp. 3172–3181. [Google Scholar]
- Wang, W.; Zhou, H.; Chen, G.; Wang, X. Fusion of a Static and Dynamic Convolutional Neural Network for Multiview 3D Point Cloud Classification. Remote Sens. 2022, 14, 1996. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, Y.; Liu, Z.; Sarma, S.E.; Bronstein, M.; Solomon, J.M. Dynamic Graph CNN for Learning on Point Clouds. ACM Trans. Graph. 2018, 5, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.; Feng, Y.; Fang, M.; Wei, M.; Qin, J.; Lu, T. Adaptive Graph Convolution for Point Cloud Analysis. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, Canada, 11–17 October 2021; pp. 4945–4954. [Google Scholar]
- Zou, J.; Zhang, Z.; Chen, D.; Li, Q.; Sun, L.; Zhong, R.; Zhang, L.; Sha, J. GACM: A Graph Attention Capsule Model for the Registration of TLS Point Clouds in the Urban Scene. Remote Sens. 2021, 13, 4497. [Google Scholar] [CrossRef]
- Kipf, T.; Welling, M. Semi-Supervised Classification with Graph Convolutional Networks. arXiv 2016, arXiv:1609.02907. [Google Scholar]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer using Shifted Windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–17 October 2021; pp. 9992–10002. [Google Scholar]
- Guo, M.; Cai, J.; Liu, Z.; Mu, T.; Martin, R.R.; Hu, S. PCT: Point cloud transformer. Comput. Vis. Media 2021, 7, 187–199. [Google Scholar] [CrossRef]
- Zhao, H.; Jiang, L.; Jia, J.; Torr, P.; Koltun, V. Point Transformer. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–17 October 2021; pp. 16239–16248. [Google Scholar]
- Pan, X.; Xia, Z.; Song, S.; Li, L.; Huang, G. 3D Object Detection with Pointformer. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Online, 19–25 June 2021; pp. 7459–7468. [Google Scholar]
- Yang, Y.; Feng, C.; Shen, Y.; Tian, D. FoldingNet: Point Cloud Auto-Encoder via Deep Grid Deformation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 206–215. [Google Scholar]
- Wen, X.; Li, T.; Han, Z.; Liu, Y. Point Cloud Completion by Skip-attention Network with Hierarchical Folding. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 1936–1945. [Google Scholar]
- Wang, Y.; Tan, D.J.; Navab, N.; Tombari, F. SoftPoolNet: Shape Descriptor for Point Cloud Completion and Classification. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 70–85. [Google Scholar]
- Wen, X.; Xiang, P.; Han, Z.; Cao, Y.; Wan, P.; Zheng, W.; Liu, Y. PMP-Net: Point Cloud Completion by Learning Multi-step Point Moving Paths. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Online, 19–25 June 2021; pp. 7439–7448. [Google Scholar]
- Huang, Z.; Yu, Y.; Xu, J.; Ni, F.; Le, X. PF-Net: Point Fractal Network for 3D Point Cloud Completion. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 7659–7667. [Google Scholar]
- Xie, C.; Wang, C.; Zhang, B.; Yang, H.; Chen, D.; Wen, F. Style-based Point Generator with Adversarial Rendering for Point Cloud Completion. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Online, 19–25 June 2021; pp. 4617–4626. [Google Scholar]
- Goodfellow, L.; Abadie, J.P.; Mirza, M.; Xu, B.; Farley, D.W.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Nets. arXiv 2014, arXiv:1406.2661v1. [Google Scholar]
- Fan, H.; Su, H.; Guibas, L. A Point Set Generation Network for 3D Object Reconstruction from a Single Image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2463–2471. [Google Scholar]
- Fei, B.; Yang, W.; Chen, W.; Li, Z.; Li, Y.; Ma, T.; Hu, X.; Ma, L. Comprehensive Review of Deep Learning-Based 3D Point Clouds Completion Processing and Analysis. arXiv 2022, arXiv:2203.03311. [Google Scholar]
- Yang, Q.; Chen, S.; Xu, L.; Sun, J.; Asif, M.S.; Ma, Z. Point Cloud Distortion Quantification based on Potential Energy for Human and Machine Perception. arXiv 2021, arXiv:2103.02850. [Google Scholar]
- Wu, T.; Pan, L.; Zhang, J.; Wang, T.; Liu, Z.; Lin, D. Density-aware Chamfer Distance as a Comprehensive Metric for Point Cloud Completion. arXiv 2014, arXiv:2111.12702. [Google Scholar]
- Zeiler, M.D.; Krishnan, D.; Taylor, G.W.; Fergus, R. Deconvolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2528–2535. [Google Scholar]
- He, J.; Shen, L.; Albanie, S.; Sun, G.; Wu, E. Squeeze-and-Excitation Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 2011–2023. [Google Scholar]
- Chang, A.X.; Funkhouser, T.; Guibas, L.; Hanrahan, P.; Huang, Q.; Li, Z.; Savarese, S.; Savva, M.; Song, S.; Su, H.; et al. ShapeNet: An Information-Rich 3D Model Repository. arXiv 2015, arXiv:1512.03012. [Google Scholar]
- Groueix, T.; Fisher, M.; Kim, V.G.; Russell, B.C.; Aubry, M. A Papier-Mache Approach to Learning 3D Surface Generation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 216–224. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RigelScan | Repetition Rate | Scanning Beam | Range Resolution |
|---|---|---|---|
| Standard mode | 205,000 fps | 14 | 0.05 mm |
| Fine mode | 320,000 fps | 14 | 0.03 mm |
| Epoch | |||
|---|---|---|---|
| 1–50 | 1 | 0 | 0 |
| 50–75 | 0 | 1 | 0.1 |
| 75–100 | 0 | 1 | 0.5 |
| 100–200 | 0 | 1 | 1 |
| 200–400 | 0 | 0 | 1 |
| Methods | Average | Plane | Cabinet | Car | Chair | Lamp | Couch | Table | Boat |
|---|---|---|---|---|---|---|---|---|---|
| FoldingNet [32] | 14.31 | 9.49 | 15.80 | 12.61 | 15.55 | 16.41 | 15.97 | 13.65 | 14.99 |
| TopNet [7] | 12.15 | 7.61 | 13.31 | 10.90 | 13.82 | 14.44 | 14.78 | 11.22 | 11.12 |
| AtlasNet [46] | 10.85 | 6.37 | 11.94 | 10.10 | 12.06 | 12.37 | 12.99 | 10.33 | 10.61 |
| PCN [5] | 9.64 | 5.50 | 22.70 | 10.63 | 8.70 | 11.00 | 11.34 | 11.68 | 8.59 |
| GRNet [3] | 8.83 | 6.45 | 10.37 | 9.45 | 9.41 | 7.96 | 10.51 | 8.44 | 8.04 |
| PMP-Net [35] | 8.73 | 5.65 | 11.24 | 9.64 | 9.51 | 6.95 | 10.83 | 8.72 | 7.25 |
| CRN [9] | 8.51 | 4.79 | 9.97 | 8.31 | 9.49 | 8.94 | 10.69 | 7.81 | 8.05 |
| PoinTr [12] | 8.38 | 4.75 | 10.47 | 8.68 | 9.39 | 7.75 | 10.93 | 7.78 | 7.29 |
| NSFA [8] | 8.06 | 4.76 | 10.18 | 8.63 | 8.53 | 7.03 | 10.53 | 7.35 | 7.48 |
| SnowflakeNet [10] | 7.21 | 4.29 | 9.16 | 8.08 | 7.89 | 6.07 | 9.23 | 6.55 | 6.40 |
| KASiam (Ours) | 6.87 | 3.90 | 9.28 | 8.02 | 7.21 | 5.51 | 8.82 | 6.25 | 5.96 |
| USC | CAP | SAA | CA | Shape Refiner | Average | Plane | Chair | Lamp | Boat | |
|---|---|---|---|---|---|---|---|---|---|---|
| ✓ | ✓ | ✓ | ✓ | 6.92 | 3.92 | 7.32 | 5.59 | 6.02 | ||
| ✓ | ✓ | ✓ | ✓ | 7.25 | 4.53 | 8.43 | 6.40 | 6.99 | ||
| ✓ | ✓ | ✓ | ✓ | 7.08 | 4.42 | 8.17 | 6.23 | 6.65 | ||
| ✓ | ✓ | ✓ | ✓ | 7.01 | 4.27 | 8.02 | 6.12 | 6.34 | ||
| ✓ | ✓ | ✓ | ✓ | 8.35 | 5.31 | 9.74 | 7.34 | 7.94 | ||
| Full | ✓ | ✓ | ✓ | ✓ | ✓ | 6.87 | 3.90 | 7.21 | 5.51 | 5.96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Ma, Y.; Xu, K.; Wang, L.; Wan, J. KASiam: Keypoints-Aligned Siamese Network for the Completion of Partial TLS Point Clouds. Remote Sens. 2022, 14, 3617. https://doi.org/10.3390/rs14153617
Liu X, Ma Y, Xu K, Wang L, Wan J. KASiam: Keypoints-Aligned Siamese Network for the Completion of Partial TLS Point Clouds. Remote Sensing. 2022; 14(15):3617. https://doi.org/10.3390/rs14153617
Chicago/Turabian StyleLiu, Xinpu, Yanxin Ma, Ke Xu, Ling Wang, and Jianwei Wan. 2022. "KASiam: Keypoints-Aligned Siamese Network for the Completion of Partial TLS Point Clouds" Remote Sensing 14, no. 15: 3617. https://doi.org/10.3390/rs14153617
APA StyleLiu, X., Ma, Y., Xu, K., Wang, L., & Wan, J. (2022). KASiam: Keypoints-Aligned Siamese Network for the Completion of Partial TLS Point Clouds. Remote Sensing, 14(15), 3617. https://doi.org/10.3390/rs14153617