1. Introduction
Due to the low cost of the non-coherent X-band marine radar, it is commonly utilized for ship navigation and has been widely used to measure sea wave parameters in recent years [
1,
2,
3]. The wavelength of the electromagnetic wave of the X-band radar is about 3 cm. Due to the influence of the ocean and the meteorological environment, the collected X-band marine radar image is the backscatter echo intensity of the rough sea surface and usually captures the sea clutter from the observed sea surface. The collected X-band radar image also contains some non-wave information, such as rainfall interference, since the marine radar is sensitive to rainfall.
Rainfall determination based on diverse radars has recently attracted more attention [
4]. A fuzzy logic algorithm is used to separate the rainfall and the non-rainfall echo based on the acquired polarimetric radar data [
5]. A composite-weighted algorithm is utilized to retrieve rainfall for the X-band polarimetric radar data [
6]. At a high temporal resolution of 1 min, the rainfall detection is completed by using rain-induced microwave attenuation [
7]. With the rapid development of artificial intelligence, the convolutional neural network, instead of the traditional exponential relation between radar reflectivity factors and precipitation, is used to estimate the precipitation [
8]. However, the weather radar installation for rain intensity monitoring is strictly limited by the shortage of spectrum resources on a ship. Meanwhile, the design of adding a meteorological channel to a coherent warning radar is deeply troubled by the “radar fingerprint” exposure. When the shipborne marine radar is used for navigation safety, the obtained radar echo image can be used for rainfall detection. This is particularly critical for saving ship resources and controlling equipment costs. Although the non-coherent X-band marine radar only outputs intensity, the X-band marine radar commonly has a high temporal resolution of the second order compared to the weather radar. Thus, the research on rainfall detection from the non-coherent X-band marine radar is developed to control the radar quality for improving the inversion accuracy and reliability of wave parameters.
When the marine radar illuminates the sea surface, raindrops will change the roughness of the sea surface and affect the propagation of the electromagnetic wave. Meanwhile, the echo intensity of the radar image increases with the increase in sea surface roughness [
9,
10]. The existing rainfall interference changes the texture features of the sea wave in the radar image, which decreases the quality of the radar image and the reliability of the extracted wave information [
11]. Thus, the rain-free radar images are commonly utilized to extract wave parameters and wind information.
Currently, inversion methods for extracting sea-state parameters and wind information from rain-contaminated radar images are being developed. The wind parameters are obtained from the rain-contaminated radar images based on the ensemble empirical mode decomposition and the texture feature of the echo intensity [
12,
13]. Based on the S-band marine radar, the feasibility of retrieving wave information during precipitation is investigated [
14]. However, the retrieving accuracy of the wave parameters is limited when the utilized radar image contains rainfall interference. To improve the reliability and accuracy of wave parameters extracted from a rain-contaminated radar image, a novel method based on the wavelet transform is utilized to eliminate the influence of rainfall on the radar image [
15].
The inversion technology of retrieving ocean environmental information from rain-contaminated radar images is different from that from rain-free radar images, since the rain changes the texture of the images. To control the quality of radar images and improve the retrieving accuracy, it is necessary to detect whether the collected radar image contains rainfall interference before retrieving wave parameters. Meanwhile, the research on rainfall detection from collected X-band marine radar images has recently attracted much attention. Therefore, we focus on rainfall detection technology from the selected analysis area of the X-band marine radar images in this paper.
By investigating the influence of rainfall on the backscatter echo characteristics of sea waves, it is found that the rainfall intensity is proportional to the echo intensity of the radar image. Moreover, a difference in the spatial texture between the rain-contaminated image and the rain-free radar image exists. The statistical parameters, such as mean value, standard deviation and correlation coefficient of the radar image, are used to detect rainfall [
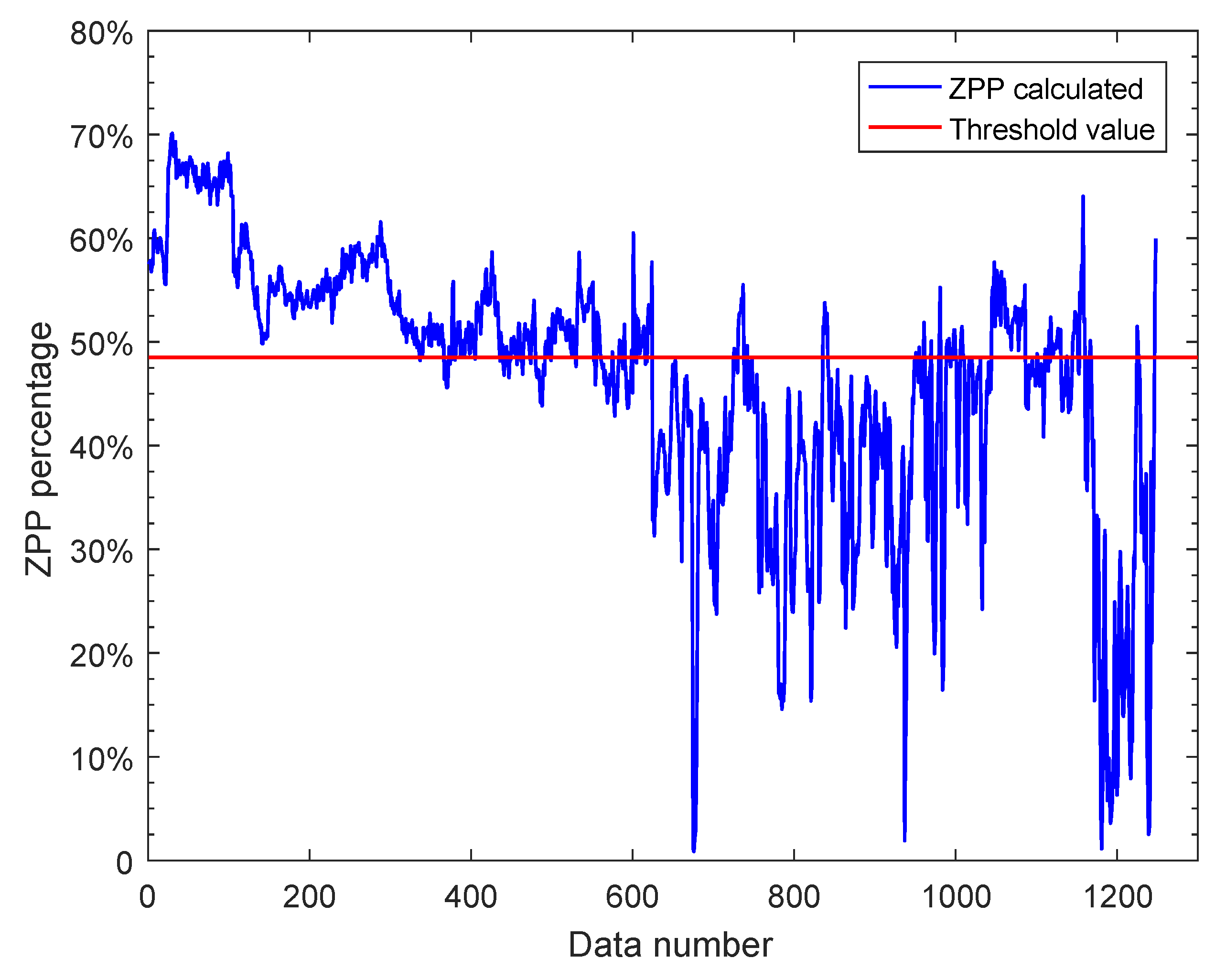
16]. Since the influence of rainfall interference on echo intensity is complex, these statistical parameters are not entirely suitable for the task of rainfall detection, and the performance of the rainfall detection needs to be further improved. Based on the fact that the number of zero intensity pixels varies with the rainfall intensity, a parameter index of the zero-pixel percentage (ZPP), which is the percentage of the number of zero intensity pixels in the whole image, is proposed to detect whether the radar image contains rainfall interference [
17]. However, the threshold value needs to be reset for different radar platforms, which seriously limits the application of the ZPP method. Based on the rough sea surface model and the radiative transfer model, the backscatter model of rainfall over the sea surface is developed for the synthetic aperture radar [
18]. Based on the feature that the image echo intensity changes with rainfall intensity, a support vector machine (SVM) scheme is proposed to detect the rain-contaminated radar image [
19]. A histogram of the radar echo intensity is utilized to extract the rainfall feature. Based on the extracted intensity feature and the SVM-based algorithm, the proposed method can accurately classify rainfall images [
20]. Based on the extracted texture feature vector and the hierarchical agglomerative clustering technology, the difference in the echo intensity is used to distinguish the low-backscatter region and the rainfall region from the collected X-band marine radar images [
21]. Based on the difference in the average echo intensity between a rain-contaminated radar image and a rain-free radar image, a rainfall detection method combining the ZPP and the average echo intensity is proposed in [
22]. The detection accuracy of the method is higher than that of the ZPP method, but the determination of the threshold value depends on abundant experimental data and the engineering experience. Based on the correlation characteristic of sea clutter, a new rainfall detection method, which is called the correlation coefficient difference (CCD) method that uses the difference in the correlation coefficient in the azimuth between the rain-free radar images and the rain-contaminated radar images is proposed in [
23]. The CCD-based method completes the task of rainfall detection by analyzing the CCD characteristic of echo intensity in the collected marine radar images. The experiment demonstrates that the calculated correlation coefficient of the rain-free radar image is higher than that of the rain-contaminated radar image. However, only the correlation coefficient at a lagged azimuth is utilized to detect the rainfall image. Based on the wave texture difference (WTD), a consecutive pixel method is used to detect the rainfall radar images in [
24]. Although the WTD-based method of rainfall detection has good detection performance, both the threshold value and the wave direction are required in advance. The wave direction could be retrieved from the rain-free marine radar image. However, it is difficult to accurately measure the wave direction from the rain-contaminated radar images.
Recently, an unsupervised machine learning algorithm has been introduced into X-band marine image processing for rainfall detection and recognition. Since the K-means clustering learning method is easy to implement and the principle is simple, the K-means clustering algorithm has been utilized for rainfall detection based on the video data and the satellite images. Based on the K-means clustering algorithm, a histogram model is proposed for the application of rainfall detection from the video data [
25]. Then, a method for heavy rain detection and removal from the video image is developed [
26]. Because of the complexity of rainfall in the video image, the pixel of the video image is classified based on the optimized K-means clustering algorithm. To detect the information change of the satellite image, a novel approach is proposed by combining principal component analysis, which is used to extract the feature, and the K-means clustering algorithm [
27,
28]. Based on the measurement of the minimum Euclidean distance, rainfall detection is achieved by assigning each image pixel to different clusters. The monthly precipitation data provided by the meteorological organization are used to verify the effectiveness of the proposed method. In [
29], an algorithm is proposed to detect the raindrops based on K-means clustering technology and the median filtering strategy. In [
30], based on the K-means algorithm, a method using the Gaussian mixture model is proposed to predict the rainfall intensity. The performance of the rainfall prediction is demonstrated based on the obtained satellite images. Meanwhile, the random-forest-based classification model is used to mitigate the rain effect, and the clustering model based on the self-organizing map is used to extract the regions with blurry wave signatures [
31]. Then, a convolutional neural network is used to calibrate the rain-contaminated radar images [
32]. Experimental results show that the proposed scheme could obtain relatively high inversion accuracy. To identify the rain-contaminated region from the marine radar images, a method based on the texture features is proposed [
33]. The discrete wavelet transform and the Gabor filter are utilized to generate feature vectors. Based on the collected shipborne marine radars under different rain conditions, the experimental results show that the proposed method could effectively detect rain-contaminated pixels of the radar image. Since the rain-contaminated radar images deteriorate the performance of ocean remote sensing, a novel method is proposed to detect and segment rain-contaminated regions in the marine radar images based on a deep neural network model [
34]. For retrieving the wave direction, the ZPP of the occlusion area of the radar image is utilized to distinguish the rain-free radar images [
35].
Although the K-means clustering algorithm could be utilized to detect rainfall interference from the video data and the satellite images, the imaging mechanism of the sea wave and rainfall in the X-band marine radar image is different from that of the video data and the satellite images. At the same time, the characteristic of rainfall in the X-band marine radar images is different from that of the satellite images. Until now, the K-means clustering algorithm has not been used to detect rain-contaminated images from collected X-band marine radar images. Based on the difference in the correlation coefficients between the rain-free radar image and the rain-contaminated radar image, the correlation coefficient feature vector (CCFV) could be constructed from the calculated correlation coefficient in the lagged azimuth. Since a difference in extracted CCFVs between rain-free radar images and rain-contaminated radar images exists, it is possible to detect the rainfall image based on the CCFVs. Thus, a method of rainfall detection using the constructed CCFV and an unsupervised K-means clustering method is proposed in this paper to control the quality of the radar image. For the rainfall detection of the proposed method, a detection threshold value is not required since the K-means clustering learning method is adopted.
The organization of the paper is as follows: The radar configuration and radar data are described in
Section 1. Based on the difference in the correlation coefficient characteristic, the detection method of the rain-contaminated images from the acquired X-band marine radar images is described in
Section 2.
Section 3 presents the proposed rainfall detection method using the constructed CCFV and the K-means clustering algorithm. The effectiveness of the proposed method is certified based on the acquired X-band marine radar images in
Section 4. Finally, the discussion and conclusion are summarized.
2. Radar Data Overview
The collected radar data based on the 760B marine radar on 14–18 December 2013 were utilized to certify the effectiveness and analyze the performance of the proposed method. The detailed configuration parameters of the marine radar are shown in
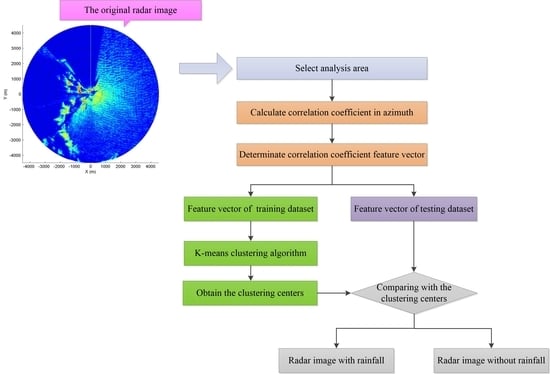
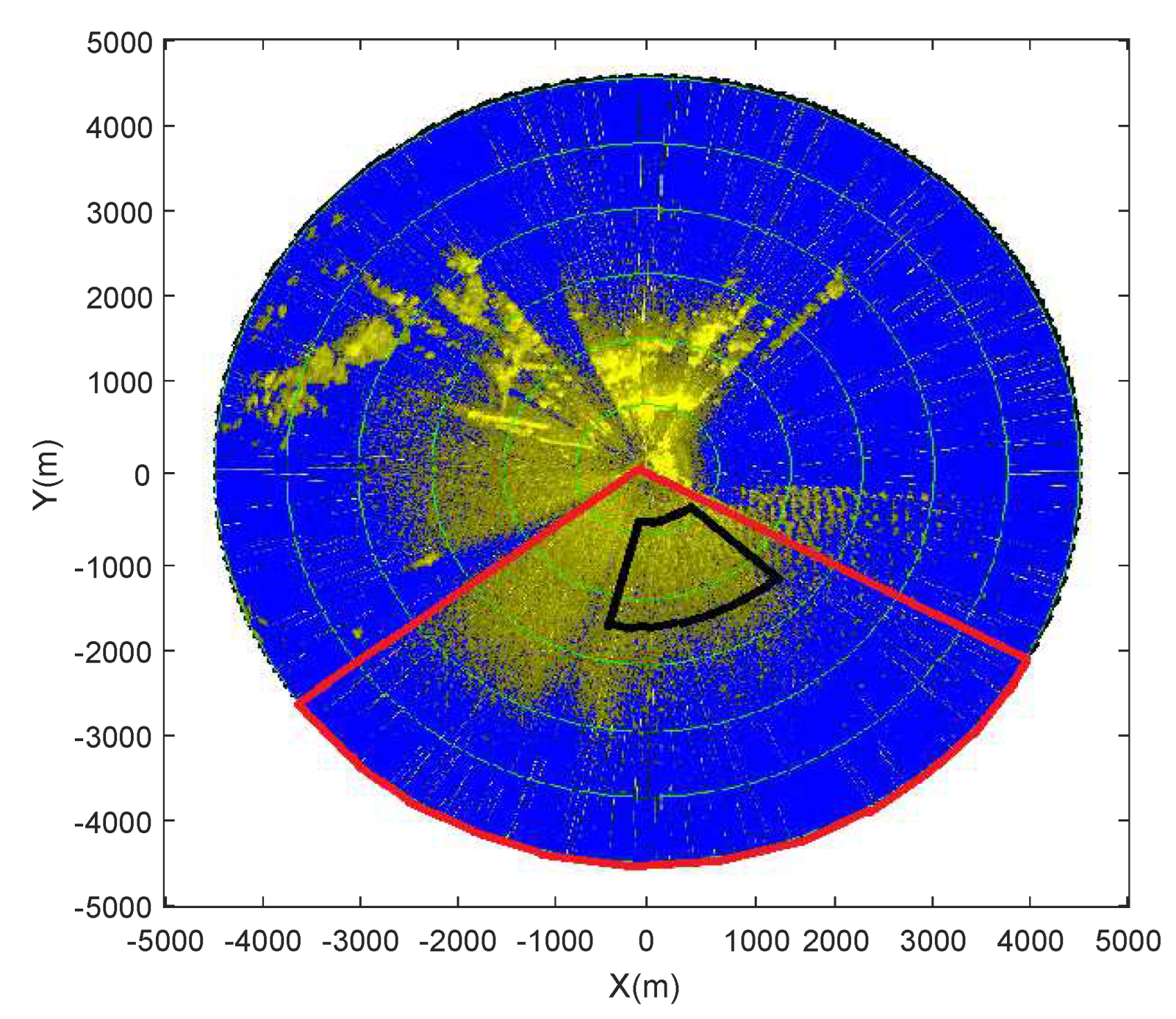
Table 1. The output analog signal of the marine radar is digitized by a 14-bit high-speed acquisition card. Then, the collected signal, which is called the backscatter echo intensity, is mapped to the range between 0 and 2.5 V. The original marine radar image acquired on 15 December at 21:33 with a rainfall rate of 2 mm/5 min is shown in
Figure 1. The heading of the radar image is 6
from the north. The wind direction and wind speed are 35
and 13.7 m/s, respectively. The significant wave height of the sea wave is 2.1 m. The fan-shaped area composed of the red solid line in
Figure 1 is the sea observation area of the X-band marine radar. The yellow part of the fan-shaped area is the superposition of the sea clutter and the rainfall interference. The blue part is mainly the background noise. From
Figure 1, it can be observed that the X-band marine radar is sensitive to rainfall. The texture feature of the sea wave cannot be observed clearly due to the influence of the rainfall interference on the backscatter echo intensity.
Considering the decay of the radar signal in distance and the texture feature of the observation area, the observation region in the azimuth from 125
to 190
and at a distance of 900 m to 1800 m, which is denoted by the black solid line in
Figure 1, was selected for analysis. Meanwhile, the echo intensity of the selected analysis area in the azimuth is used to obtain the correlation coefficient and calculate the CCFV. The image resolution in distance is 7.5 m. Thus, 120 sets of the correlation coefficient in the lagged azimuth are obtained and are averaged to achieve the averaged correlation coefficient and construct the CCFV for rainfall detection in our experiment.
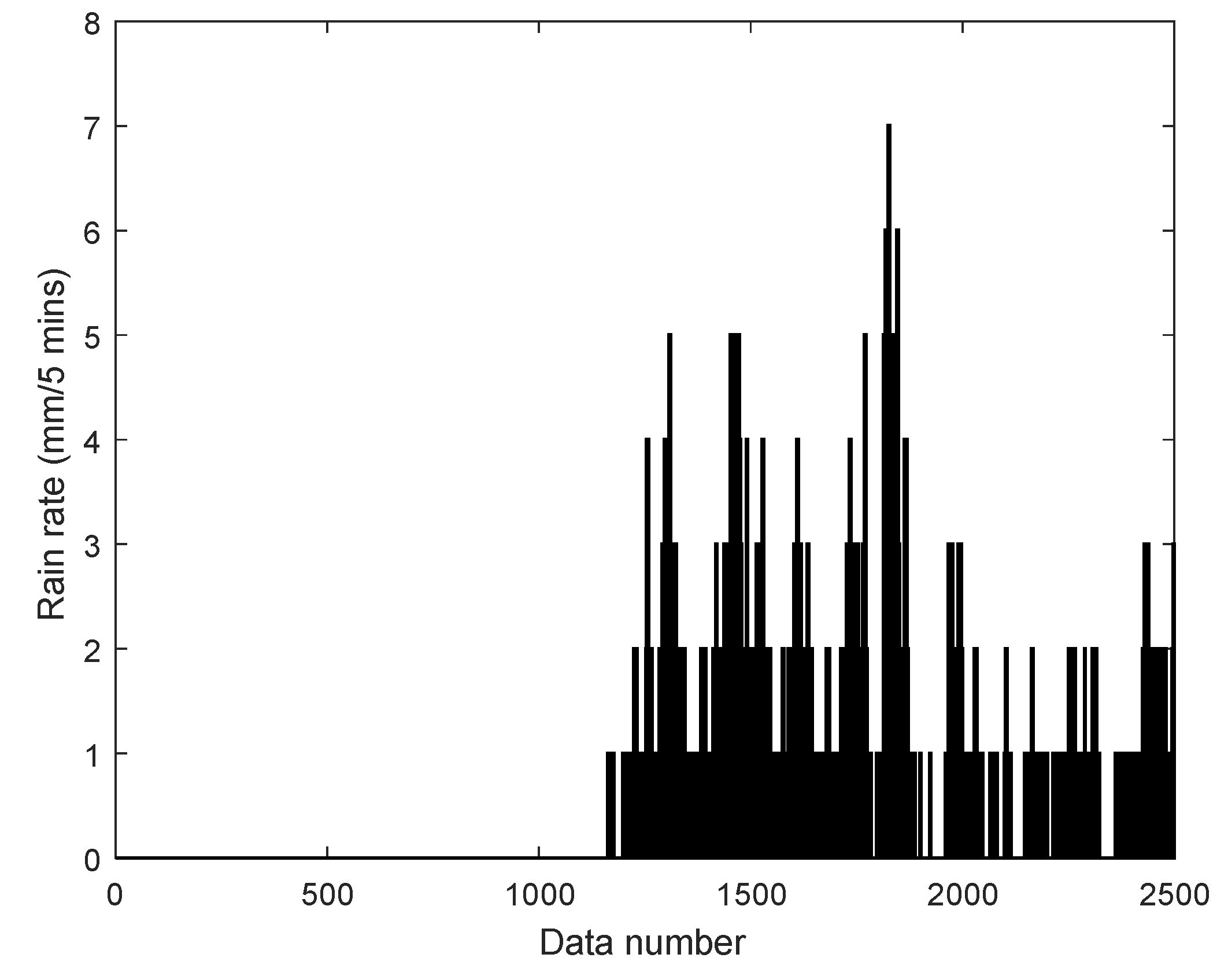
The simultaneous rainfall rate was recorded by the rain gauge, and the cumulative rainfall per 5 min as the reference value is presented in
Figure 2. The horizontal axis is the data number. The vertical axis is the simultaneous rainfall rate. The resolution of the rain gauge is 1 mm/min. The rainfall rate changes from 0 to 7 mm/5 min. Since the rainfall intensity changes rapidly, the rain intensity of 5 min is used to minimize the measurement error for light rain in this experiment.
4. The Proposed Rainfall Detection Method Based on the Constructed CCFV
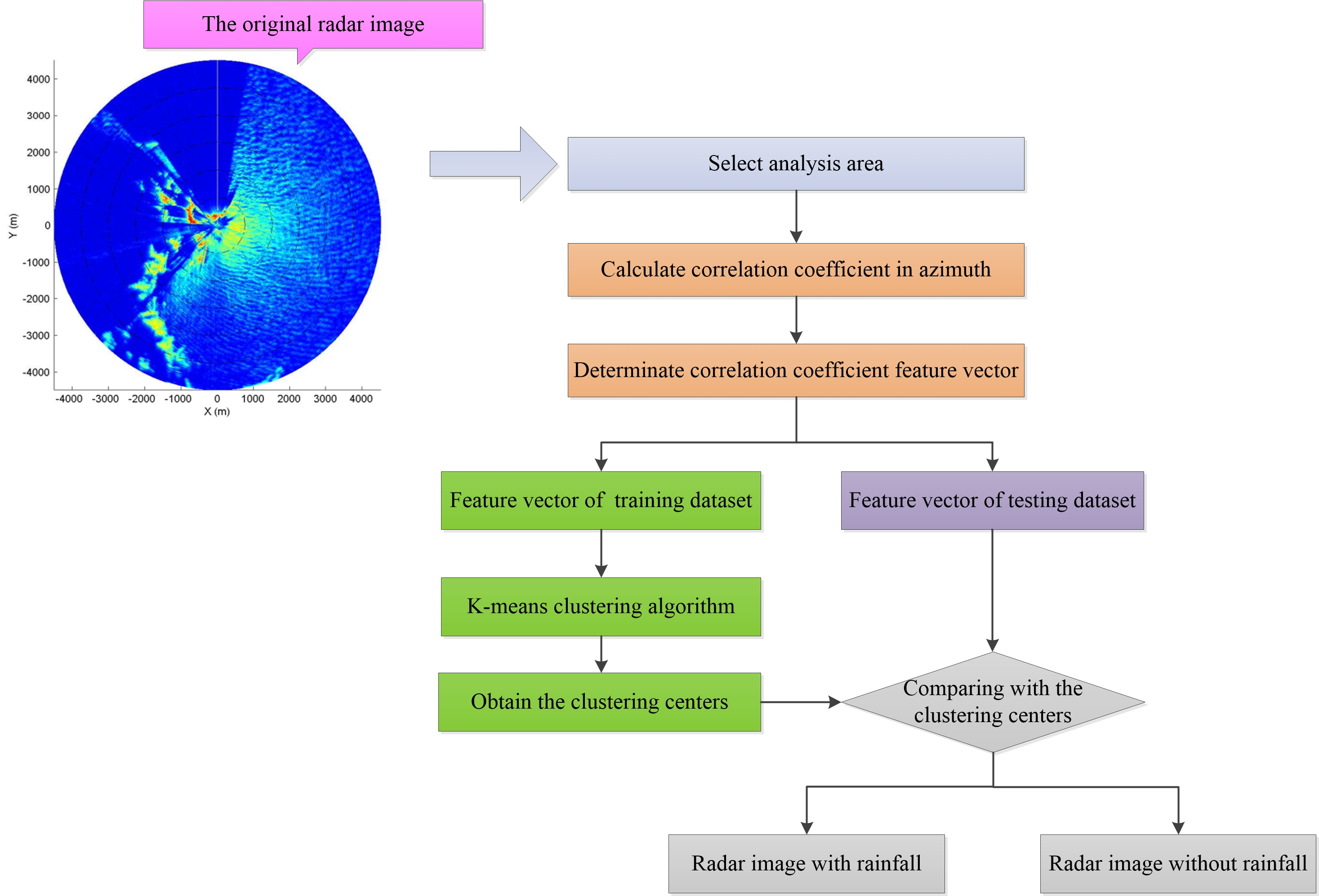
Since the CCD between the rain-contaminated radar image and the rain-free image exists in the lagged azimuth, the feature of the correlation characteristic in the azimuth is used to constitute the CCFV and execute the task of rainfall detection. The rainfall detection from the marine radar images can be recognized as the task of classification. Due to the simple principle and the convenience of the implementation, the unsupervised K-means clustering learning method is adopted to divide the extracted CCFVs into the rain-free and rain-contaminated classifications. Based on the CCFV and the K-means clustering algorithm, a new method for rainfall detection from the collected X-band marine radar images is proposed in this paper.
Based on the acquired radar images, the analysis area is selected after filtering the co-frequency interference noise of the radar images. A method for detecting and suppressing co-frequency interference noise in X-band marine radar images is proposed in [
36]. The data lines containing co-frequency interference noise in the distance direction are detected from radar images by using the correlation, and a Laplace enhancement template is used to traverse the detected data line to locate the noise points. Then, the interpolation method with the adjacent information is used to repair the located co-frequency interference. Subsequently, the correlation coefficient of the radar image in the azimuth can be calculated based on Equation (
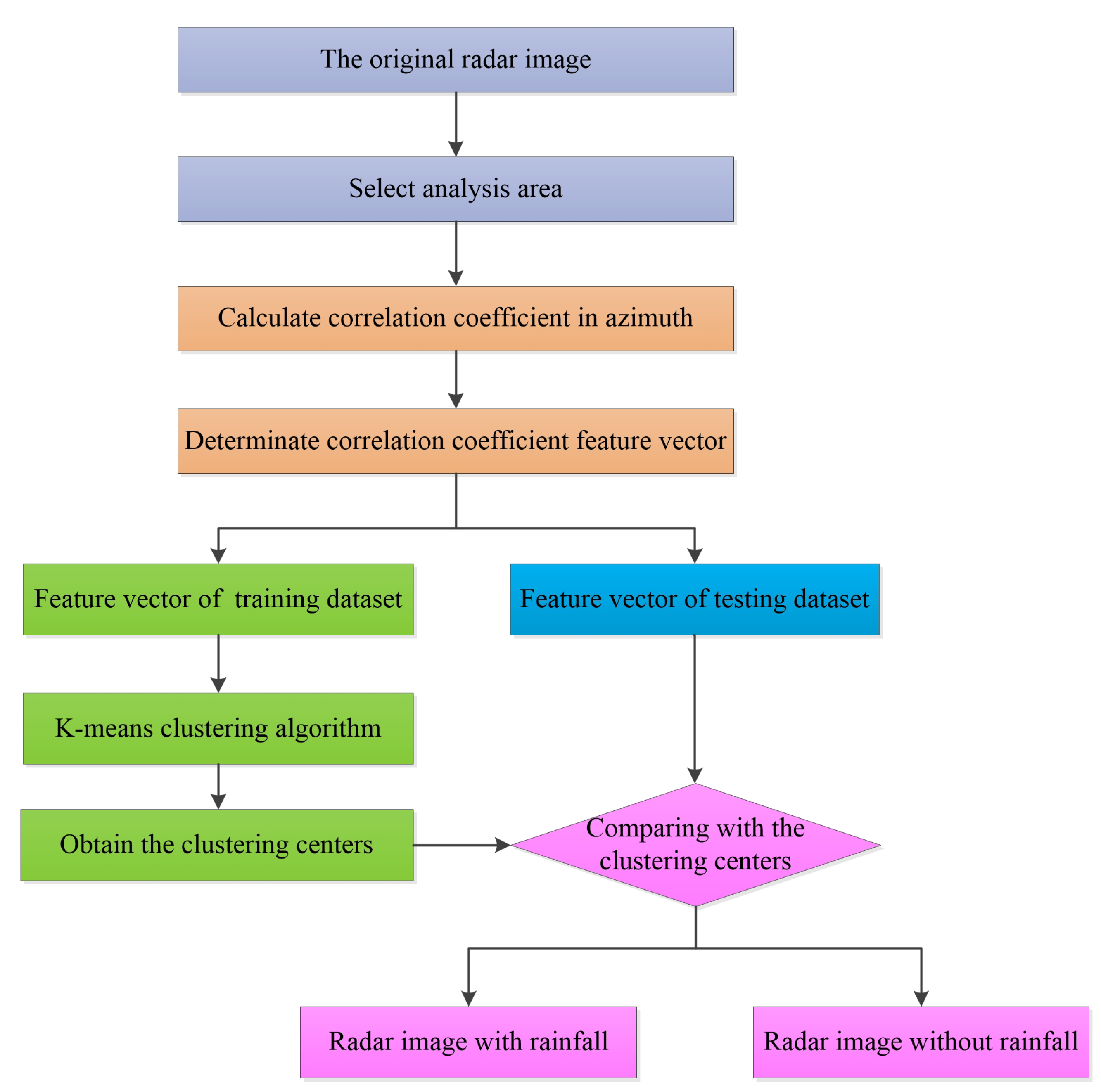
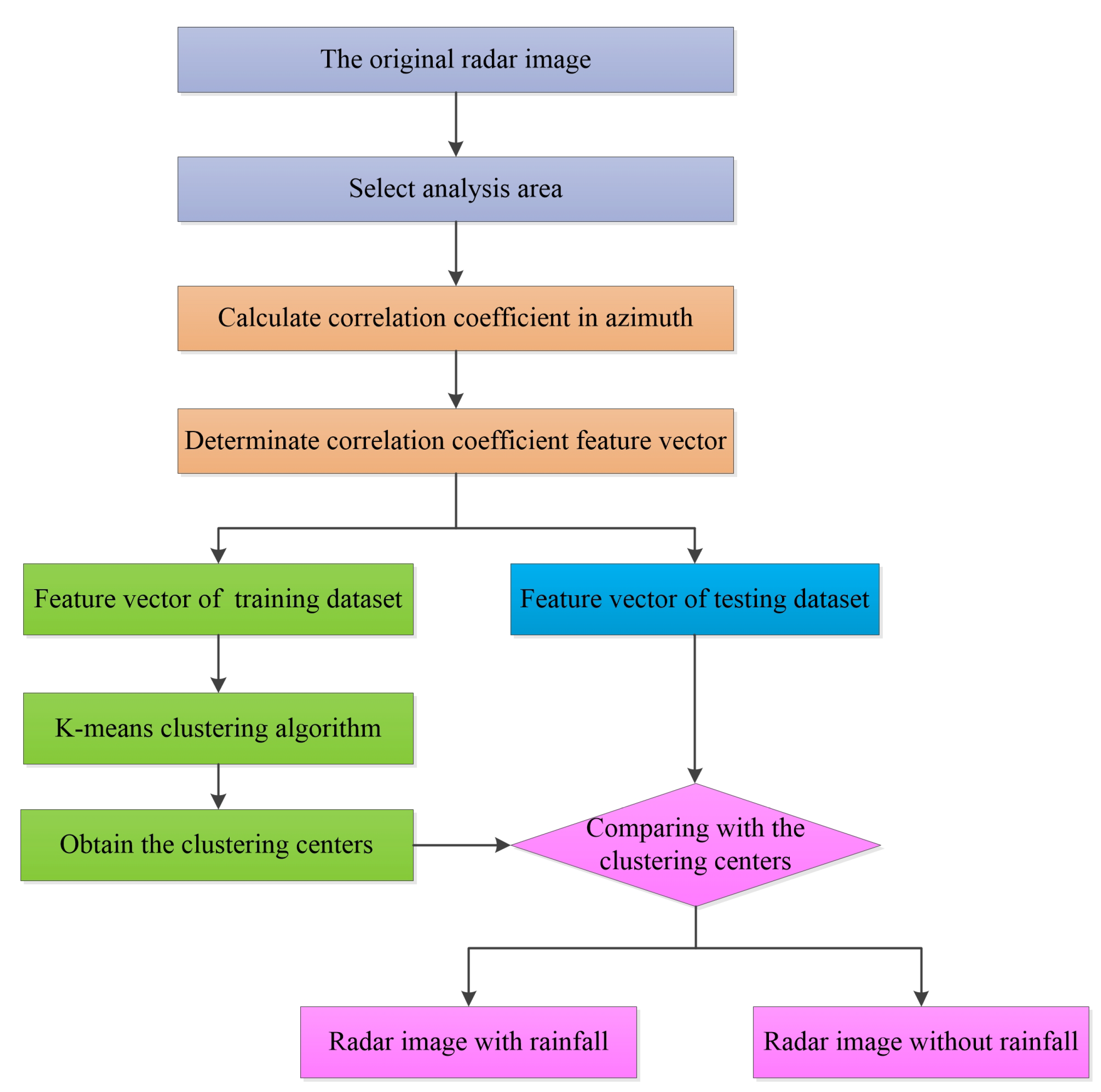
1). The CCFV is established by determining the length of the vector and selecting the correlation coefficient in the lagged azimuth. For the unsupervised K-means clustering algorithm, the recorded ≈2500 radar images are randomly divided into a training and a testing dataset. For the proportion of the 50% training dataset, both the training dataset and the testing dataset have 625 rain-free images and 624 rain-contaminated images. The CCFVs of the training dataset are used to obtain the clustering centers. After setting the number of clustering centers, the clustering center of the rain-contaminated images and the clustering center of the rain-free images can be determined based on the K-means clustering technology and the training dataset. Eventually, the rain-contaminated radar images can be detected by comparing the measurement distance between the CCFV of the testing dataset and the obtained clustering centers. A flowchart of the proposed rainfall detection method is presented in
Figure 3. In our radar system, the received signal is mainly the system thermal noise when the echo intensity is less than the threshold value of 983 for the 14-bit acquisition card. For the selected analysis area in
Figure 1, which is surrounded by a black solid line, the low backscatter direction is determined when the mean of the echo intensity in a distance direction is less than the threshold value of 983. The radar image is discarded when the low backscatter direction percentage is higher than 90%, since the correlation coefficient of the sea clutter is used to detect the rain-contaminated radar image [
37,
38]. Thus, the control strategy of the image quality in [
37,
38] is adopted to control the quality of the marine radar image.
4.1. The Determination of the CCFV
Based on the correlation of the sea clutter in the spatial domain and the azimuth resolution of the marine, the detailed determination of the CCFV is given below. By statistical analysis of the correlation characteristic of the collected X-band radar images, the autocorrelation coefficient of the collected radar images in the lagged azimuth is presented in
Figure 4. The horizontal axis and the vertical axis denote the lagged angle in the azimuth and the calculated correlation coefficient, respectively. The blue solid line with the circle represents the correlation coefficient of the rain-free radar image, and the red dotted line with the star represents the correlation coefficient of the rain-contaminated radar images with the rainfall intensity of 2 mm/5 min. At the same time, the significant wave height of the sea state is 2.3 m, and the average wind speed of the sea surface is 12.4 m/s. The marine radar antenna is
m, and the horizontal beamwidth
is about
in our experiment. The number of data lines of the radar image in the azimuth is
. However, the antenna angular speed of the marine radar is not even, due to the influence of the sea surface wind. Meanwhile, the loss of the backscattered echo exists because of the fluctuation in the sea surface. Thus, the data lines in a radar image are different in practice. The number of the azimuthal line in a horizontal beamwidth
is about 13.
The spatial correlation of the sea clutter is determined by both the correlation feature of the sea clutter and the horizontal beamwidth
of the antenna of the observed radar system [
39,
40]. The calculated correlation coefficient of the rain-contaminated image in the azimuth based on Equation (
1) is different from that of the rain-free image. Unfortunately, only the correlation characteristic near the position of the half horizontal beamwidth is utilized to detect rainfall for the CCD-based rainfall detection method. Moreover, the correlation coefficient of the rain-contaminated radar image may be higher than the hard threshold at the position of half horizontal beamwidth, since the backscatter mechanism of the marine radar image is complex under rainfall conditions.
From
Figure 4, it can be observed that the autocorrelation coefficient of the rain-free radar image in the azimuth is larger than that of the rain-contaminated image when the lagged azimuth is less than 1.4
, which is close to the horizontal beamwidth
of the radar antenna. When the lagged azimuth is less than the horizontal beamwidth
, both the rain-contaminated images and the rain-free images have a high correlation coefficient, since the illumination area of the marine radar in a horizontal beamwidth
partially overlaps. However, when the lagged azimuth is greater than 1.4
, the correlation coefficient of the rain-contaminated radar image is close to that of the rain-free radar image. In this paper, the obtained CCFV in the lagged azimuth instead of the correlation coefficient at a fixed position in azimuth is used to execute the task of rainfall detection. Thus, the correlation coefficient of the lagged azimuth less than 1.4
can be selected to establish the CCFV.
From
Figure 4, we found that the difference in the correlation coefficient between the rain-contaminated radar images and the rain-free radar images is relatively large, from
to
in the azimuth. When the established CCFV contains the element where the difference between the rain-contaminated images and the rain-free images is small, it is disadvantageous for distinguishing the rain-contaminated radar image. The correlation coefficient of the rain-contaminated images may be close to the correlation coefficient of the rain-free images when the lagged azimuth is less than
. The correlation coefficient in the azimuth from
to
is selected to constitute the feature vector. Hence, the selected CCFV contains eight bins in this paper.
4.2. The Unsupervised K-Means Clustering Learning Algorithm
The task of rainfall detection can be considered as classifying the radar images into rain-free and rain-contaminated clusters. The marine radar images are used to constitute both the training dataset and the testing dataset, which contain the rain-contaminated radar images and the rain-free radar images. Based on the technology of the K-means clustering algorithm, the obtained CCFV of the training dataset can be used to achieve the clustering centers of the rain-contaminated and the rain-free images. Subsequently, the CCFV of the testing datasets can be classified into the cluster of rain-free or the cluster of rain-contaminated images. Then, the rainfall images can be detected by measuring the distance between the CCFV and each cluster center.
The main idea of the K-means clustering algorithm is to divide the training dataset into different categories through the iterative process to optimize the criterion function, which is used to evaluate the clustering performance. For the K-means clustering algorithm, the cost function is used to evaluate the clustering performance. Supposing the training dataset
S contains
K cluster subsets
, the cost function is given as
where
is the clustering center of the
i-th cluster, and the data point
belongs to the cluster
. The clustering process, which is used to seek the best clustering center
, is subject to minimizing the cost function
V. To obtain the cost function
V, it is necessary to calculate the square sum of the Euclidean distance from the CCFV in each cluster to each clustering center. Then, the cost function
V is achieved by summing the
K distance square. The
K clustering process of dataset
S is commonly finished when the value of the cost function
V is lowest. The general step of the K-means clustering algorithm is given below [
41,
42,
43]:
Input the training dataset , which is the extracted CCFV from the X-band marine radar images, and set the number of categories K. The feature dataset should be divided into categories of the rain-contaminated radar images and the rain-free radar images.
Initialize the clustering center. Select K elements from the extracted dataset S as the initial clustering center of the cluster , where denotes the new clustering center of the cluster after n iterations.
Categorize the obtained CCFV. The Euclidean distance between each CCFV and each clustering center can be calculated in turn. Based on the criterion of the minimum distance, each CCFV will be divided into the cluster where the CCFV is nearest to the clustering center.
Update the
K clustering centers. For cluster
, the obtained clustering center
after
j iterations is
where
is the number of the chosen CCFVs of the clustering cluster
. The K-means clustering algorithm is trying to seek the clustering centers of the rain-contaminated radar images and the rain-free radar images based on the testing dataset.
Determine whether the classification ends. If , the K-means algorithm converges, and the clustering process ends. Otherwise, we continue to perform the clustering adjustment in steps 3 and 4. In practice, the condition is not easy to satisfy. Commonly, we set the number of iterations in advance or suppose that the process of the iteration ends when the absolute error between the clustering center and the clustering center is close to zero.
Based on the above K-means clustering algorithm, the clustering centers of the rain-contaminated radar images and the rain-free radar images can be determined by using the training dataset.
4.3. Calculate the Distance between CCFV and Clustering Centers
Based on the achieved
K clustering centers from the CCFVs in the training dataset, the Euclidean distance between the CCFV
in the testing dataset and the cluster centers
can be described as
where
denotes the Euclidean distance between the CCFV and the clustering center
i-th.
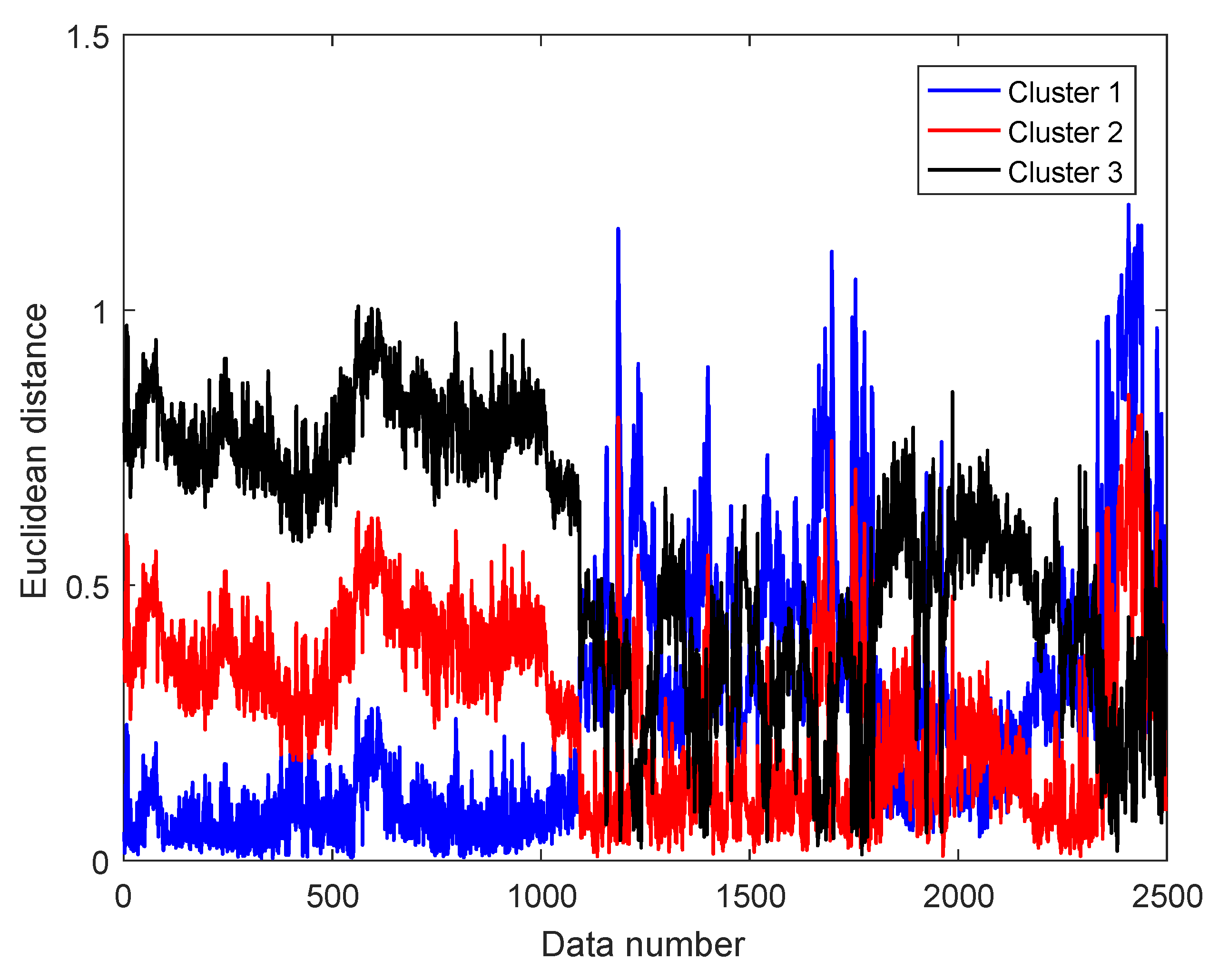
For the task of rainfall detection from the acquired marine radar images, it is important to distinguish whether the collected radar image is rain-contaminated. Supposing that and are respectively the clustering center of the rain-contaminated images and the clustering center of the rain-free images, the task of rainfall detection can be implemented by distinguishing the Euclidean distance between the CCFV and the clustering center of the rain-contaminated radar images. When the Euclidean distance between the CCFV of the testing dataset and the clustering center of the rain-contaminated radar images is less than that between the CCFV and the clustering center of the rain-free radar images, the radar image is recognized as rain-contaminated; otherwise, vice versa.
4.4. The Determination of the Number of the Clustering Centers
To determine the number of clustering centers
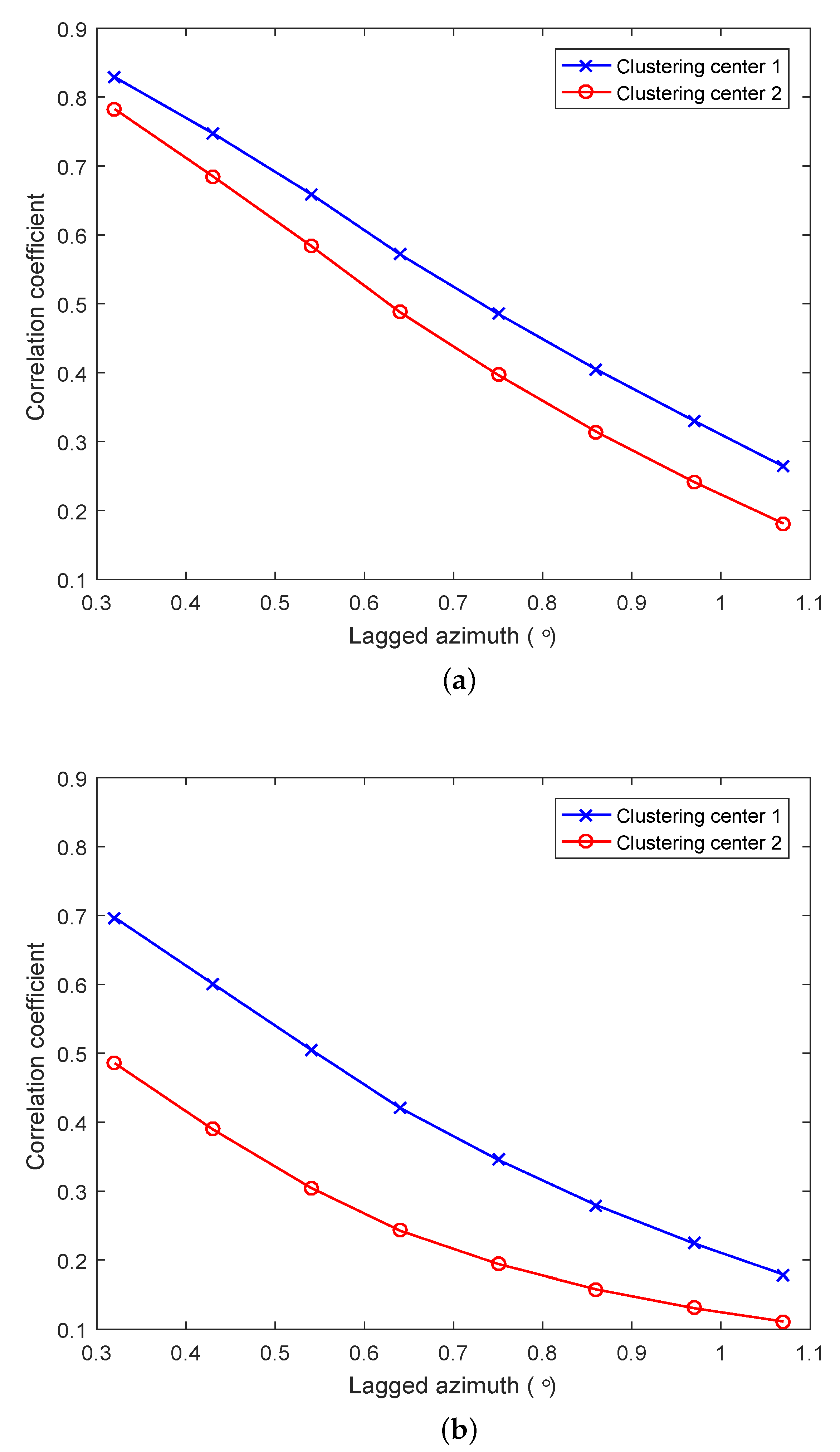
K, 300 rain-contaminated images and 300 rain-free images were randomly selected to generate the clustering centers based on the constructed CCFV and the K-means clustering algorithm, respectively.
Figure 5 shows the generated clustering centers based on the randomly selected radar images for
. For the rain-free images, the generated clustering centers are presented in
Figure 5a. The distance between the two clustering centers is relatively close.
Figure 5b is the obtained clustering centers based on the rain-contaminated images. From
Figure 5, it can be observed that the difference of clustering centers of the rain-contaminated radar images is larger than that of the rain-free radar images.
For the task of rainfall detection, it is necessary to detect whether the collected radar image is rain-contaminated. Based on the constructed CCFV of the training dataset and the K-means clustering algorithm, the calculated clustering centers are presented in
Figure 6.
Figure 6a,b are the obtained clustering centers for
and
, respectively, based on the training dataset. In
Figure 6a, the blue solid line with the cross is clustering center 1, which denotes the clustering center of the rain-free radar images. The red solid line with the circle is clustering center 2, which denotes the clustering center of the rain-contaminated radar images. From
Figure 6a, it can be found that the detection performance of the proposed method is not ideal when the number of the clustering center
K is set to 2. Since the variation range of the rainfall rate is large, the difference between the CCFV of the radar image with heavy rain and the CCFV of the radar image with light rain is larger than that between the CCFV of the rain-free radar image and the CCFV of the radar image with light rain. Thus, one obtained clustering center based on the CCFV is the rain-contaminated radar image with heavy rain. The other clustering center is the rain-free radar image and the radar image contaminated by light and moderate rain, since the clustering center of the rain-free radar image is close to that of the radar image contaminated by light or moderate rain.
In
Figure 6b, the blue solid line with the cross is clustering center 1, which denotes the clustering center of the rain-free radar images. The red solid line with the circle is clustering center 2, which denotes the clustering center of the marine radar images contaminated by light and moderate rain. The black solid line with the triangle is clustering center 3, which denotes the clustering center of the marine radar images contaminated by heavy rain. From
Figure 6, it can be observed that the difference in the correlation coefficient between clustering center 1 and clustering center 2 is still relatively large. Thus, clustering center 1 and clustering center 2 can be easily separated. Since the difference in the correlation coefficient between clustering center 1 and clustering center 3 is large, it is easy to detect the radar images with heavy rain from the acquired marine images. The software of Matlab and the K-means functions are used to execute the K-means clustering process. The maximum number of iterations is set to 100, and the iteration process is ended in advance when the absolute error of the extracted clustering centers is zero.
Compared with
Figure 5, we observed that the obtained clustering center of the rain-free images in
Figure 6b is similar to that of rain-free images in
Figure 5a, and the clustering centers of the rain-contaminated images could perfectly denote that of rain-contaminated images in
Figure 5b. However, it is hard to accurately distinguish radar images when the extracted CCFV is between clustering center 1 and clustering center 2 for
. Therefore, we set the number of the clustering centers
to distinguish the rain-free and the rain-contaminated radar images under different rainfall rates.
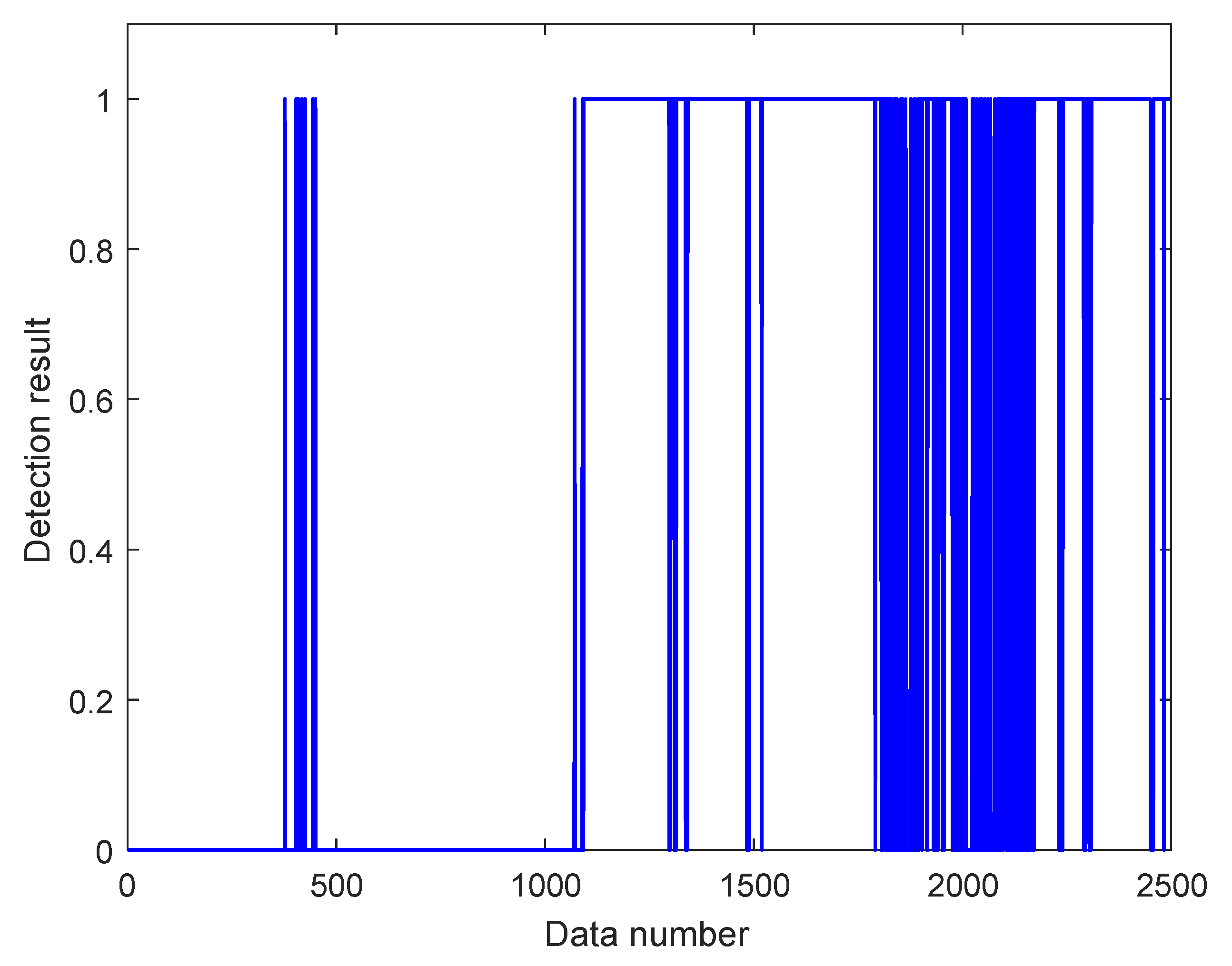
4.5. Rainfall Detection Principle of the Proposed Method
Based on the obtained Euclidean distance
,
, between the CCFV and the clustering center
i, the task of rainfall detection for the number of the clustering center
can be described as
where
is the Euclidean distance between the CCFV and the clustering center 1 of the rain-free images. Since
and
are the distance between the CCFV and the clustering centers of the rain-contaminated images, the task of rainfall detection is induced to detect the rain-free radar images. When the Euclidean distance between the CCFV of the radar image of the testing dataset and clustering center 1, which is the clustering center of the rain-free radar images, is the lowest, the radar image is rain-free; otherwise, the radar image is rain-contaminated.
6. Discussion
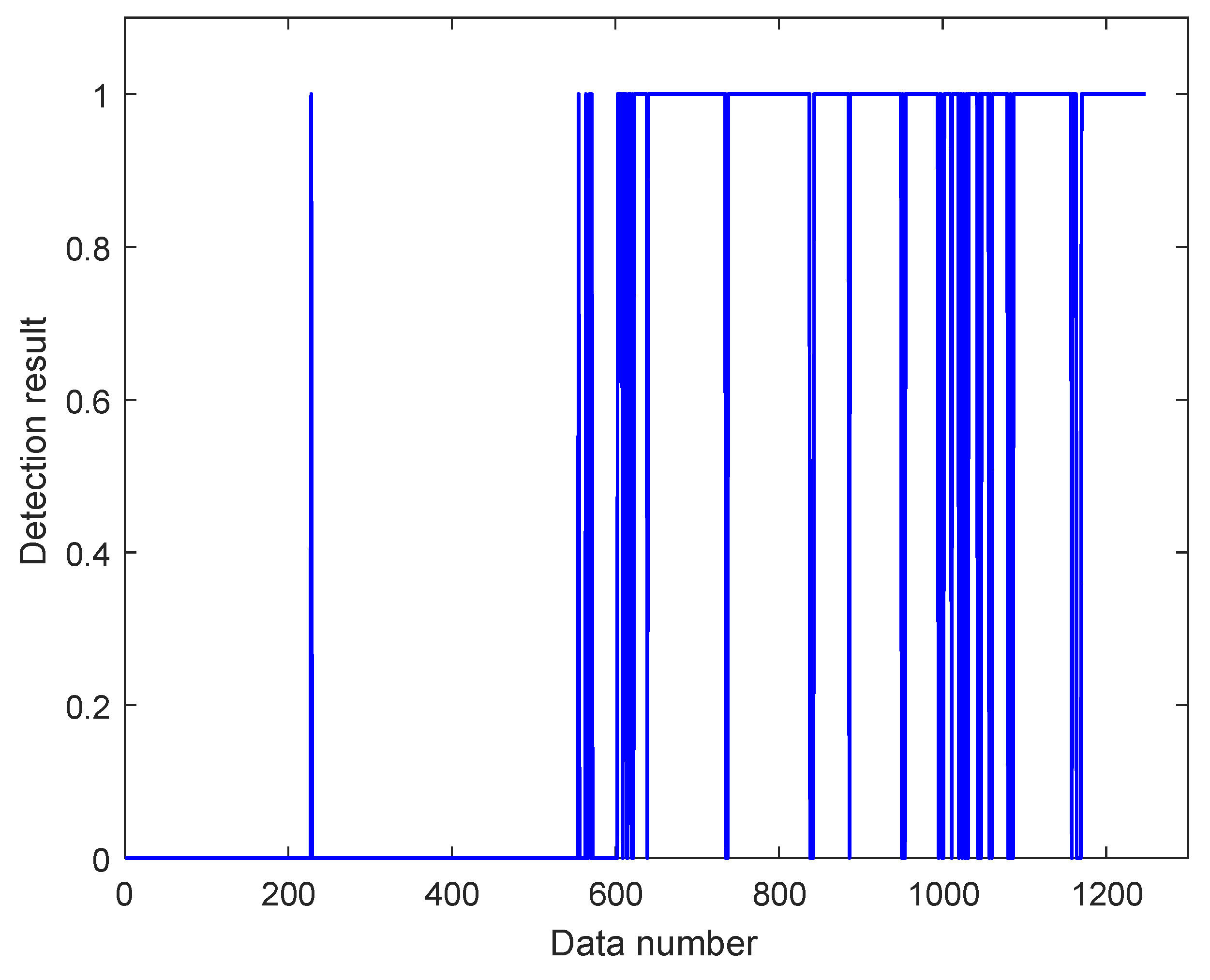
Although the ZPP method is commonly used to detect rainfall interference from X-band marine radar images, the detection accuracy of the ZPP method depends on the threshold value. For the CCD-based method, the determination of the threshold value depends on the engineering experience, and only the information at a fixed position in the lagged azimuth is utilized to detect rainfall interference. Rainfall images can be effectively detected with a hard threshold value compared to the ZPP method. Based on the unsupervised K-means clustering strategy, the threshold value for rainfall detection is not required. Compared to the CCD-based method, the proposed method adequately uses the difference in the correlation coefficient by constructing CCFV and overcomes the drawback of determining the detection position in the lagged azimuth.
For the SVM-based method, the analysis area close to the radar antenna is selected. In the near range of the radar images, the echo intensity of the sea wave is relatively large under high sea conditions. For the dataset, the significant wave height of the rain-free radar images is between 1.1 m and 4.2 m. However, the significant wave height of the collected rain-contaminated radar images is between 2.8 m and 3.1 m. In addition, the rainfall rate of the rain-contaminated images is mainly 1 mm/5 min. The echo intensity and the feature of the statistical histogram of some rain-free radar images under high sea conditions are similar to that of rain-contaminated radar images. Due to the high sea conditions, some rain-free images may be recognized as rain-contaminated images for training the SVM structure. Thus, the accuracy of rain-contaminated images is better than that of rain-free images for the SVM-based method.
Since the whole sea observation area of the radar is used to calculate the ZPP, the accuracy of the ZPP method is lower for rain-contaminated images. The echo intensity of the sea clutter decays in the distance. The attenuation of the electromagnetic wave in the distance may influence radar imaging. The spatial distribution of rainfall intensity is complex, and the rainfall is uneven in radar images, which may be part of the regional distribution. Meanwhile, the percentage of rain-contaminated images with rainfall of 1 mm/5 min is prominent. Thus, the ZPP may not be sensitive to a change in rainfall with light rain when the whole sea observation area of the radar is used.
Although the threshold value is not required for the proposed rainfall detection method in this paper, it is vitally important to determine the appropriate number of the clustering centers of the K-means clustering algorithm based on the acquired radar images. The sea state was relatively stable, and the change was not obvious during the experiment, but the rainfall changed rapidly. There are great differences in the correlation coefficient of the rain-contaminated radar images with different rainfall rates. A clustering center could not accurately describe the characterization of the rain-contaminated radar images based on the acquired radar images. The number of clustering centers could be changed for the collected radar data under complicated rainfall conditions. In addition, the training and the testing dataset should have balanced rain-free and rain-contaminated radar images to accurately achieve the clustering centers, which are the characterization of the rain-free and rain-contaminated radar images, and evaluate the effectiveness of the proposed rainfall detection method.
The distribution of the rainfall on the radar images is uneven and the echo intensity of the rain-contaminated radar images is sensitive to the size of the raindrop. Thus, the detection performance based on radar images is not ideal, and a large error exists compared to the rain gauge. Since the annual rainfall at the experiment site and the number of rainfall days is less, the training data are not sufficient to achieve better clustering centers for the proposed method in this paper. Thus, more radar data can be collected to generate the training dataset and improve the detection performance of the proposed method in the future.
The recorded rain rate of the rain gauge is the accumulation of rainfall over a few minutes. The rain gauge records an original rainfall rate every minute. In this paper, the averaged rainfall rate over 5 min is utilized. The recorded rainfall rate of the rain gauge could not rapidly reflect the change in rainfall, especially for the case of light rain. The scanning period of the marine radar is about 2.3 s in our experiment. The instantaneous rain information in the marine radar is captured. The sequence of 32 radar images for retrieving wave parameters and rainfall detection is collected and stored about every 4 min due to the large volume of radar data. From the continuously observed radar images, we found that the change in the rainfall rate is complex and rapid. Since the detection mechanism between the rain gauge and the X-band marine radar is different, it is not easy to improve the detection accuracy compared with the SVM-based method or to further improve the detection accuracy of the proposed detection method compared with the rain gauge. Thus, the detection error may exist between the data number of the rain gauge and the radar images.
7. Conclusions
When rainfall interference exists in X-band marine radar images, the reliability of the inversion results is greatly reduced for retrieving wave and wind information. It is necessary to detect the rainfall before retrieving the wave parameters from the collected radar images. Therefore, rainfall detection from the collected X-band marine radar images is investigated in this paper.
Since the correlation coefficient of the sea clutter will change when the echo intensity of the radar image is rain-contaminated, a method of rainfall detection based on an unsupervised machine learning strategy is proposed in this paper. The CCFV is extracted from the marine radar images based on the calculated correlation coefficient in the lagged azimuth. Compared with the existing ZPP-based and CCD-based rainfall detection methods, the detection accuracy, respectively, increases by and for the proportion of the training dataset. Meanwhile, the proposed method does not require the threshold value, since the unsupervised K-means clustering technology is introduced. Based on the collected radar images, the experimental results demonstrate that the detection accuracy of the proposed method is, respectively, and higher than that of the SVM-based method and is, respectively, and higher than that of the WTD-based method for the proportion of the and training dataset. For the proportion of the training dataset, the performance of the proposed method is close to that of the SVM-based method and the WTD-based method.
In this paper, the length of the selected CCFV is experientially determined based on the difference in the correlation coefficient. The influence of the length of the extracted feature on the detection accuracy can be further evaluated in the future. Meanwhile, since the clustering centers depend on the rainfall intensity and the training dataset, a perfect strategy for determining the number of the clustering centers should be developed. Although the proposed method has the ability to detect the rainfall images, the performance and the accuracy of the proposed method should be further verified based on the radar images collected from different radar systems and under different sea conditions.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}