
Lower Order Description and Reconstruction of Sparse Scanning Lidar Measurements of Wind Turbine Inflow Using Proper Orthogonal Decomposition


Abstract
:1. Introduction
2. Methods
2.1. Proper Orthogonal Decomposition (POD)
2.2. The Gappy-POD
- For the first main iteration , the initial guess for the velocity at the missing points is the temporal mean of all valid data available at that particular point, i.e.,Here, and are the locations of valid and invalid points, respectively. The mean is subtracted before performing POD, so is 0. For the main iteration, the gappy field is filled with an initial guess to obtain an approximate filled field . Therefore, for the subsequent main iterations, this guess is the output from the previous main iteration .
- This is the first sub-iteration step. POD with modes is performed on the filled wind field to obtain an approximationThis uses a modification proposed by Gunes et al. [29] which is computationally efficient and provides similar accuracy as solving the minimisation problem required for the Eversen–Sirovich method [27,28].
- The data gaps are then filled using the POD reconstruction:
- The iterative process is repeated, whereby steps 2 and 3 are performed by increasing s until the calculated eigenvalue spectrum in step 2 reaches a predefined convergence level.
- This is the final sub-iteration step. The approximated wind field is stored as and then passed on to the next main iteration.
- For the subsequent main iterations, the number of POD modes used for the reconstruction is increased until the main iterations converge.
- The final velocity field is now assembled by summing up the mean wind field and the iteratively reconstructed fluctuating part.
2.3. Turbine-Mounted Lidars for Inflow Scanning
2.4. Large Eddy Simulations (LES) and the Lidar Simulator (LiXim)
3. Results
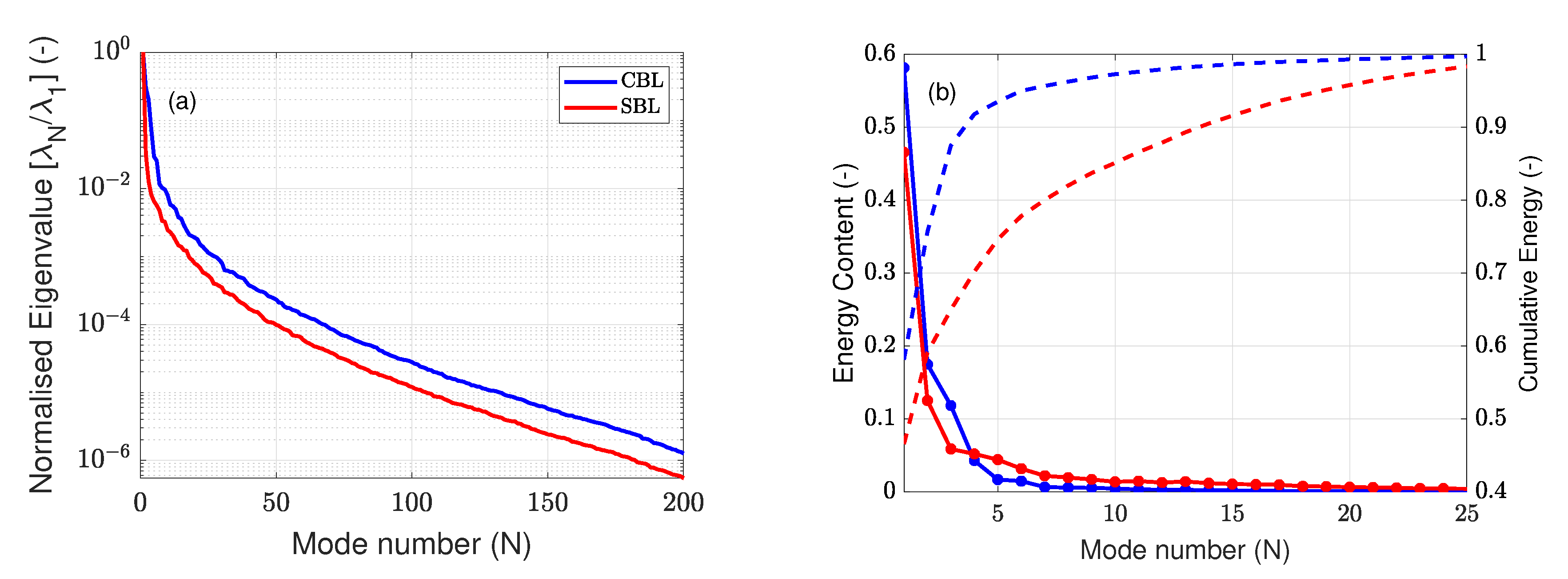
3.1. Application of the POD Methodology to Scanning Lidar Measurements
3.2. Reconstruction of the Reduced Velocity Field
3.3. Reconstruction Evaluation Using the Three-Parameter Wind Field Model
3.3.1. Time Series Reconstruction of the Three-Parameter Model
3.3.2. Accuracy of the Three-Parameter Wind Field Reconstruction and an Interpretation of the POD Modes
3.4. Reconstruction Evaluation in the Frequency Domain
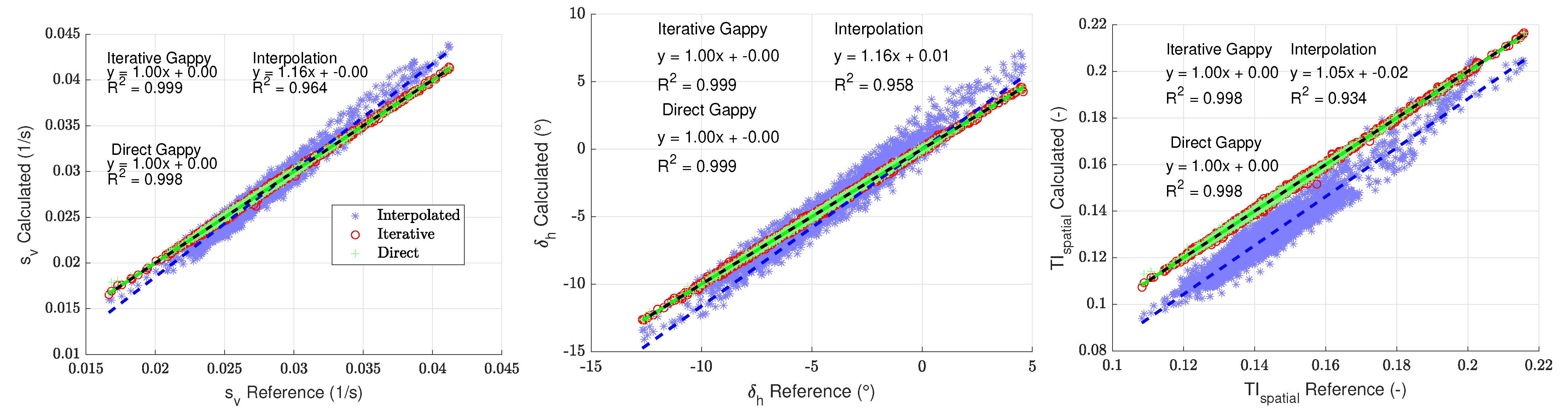
3.5. Gappy-POD Reconstruction of Missing Data Points
Reconstruction of Spatial Wind Field Parameters
4. Discussion
4.1. Towards POD-Based Reduced-Order Inflow Modelling
4.2. Reconstruction of Missing Data Points Using Gappy-POD
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ABL | Atmospheric Boundary Layer |
| CBL | Convective Boundary Layer |
| FAST | Fatigue, Aerodynamics, Structures and Turbulence code |
| FFT | Fast Fourier Transform |
| IPC | Individual Pitch Control |
| LES | Large Eddy Simulations |
| LiXim | Lidar Scanner Simulator |
| PALM | Parallelised Large Eddy Simulation Model |
| POD | Proper Orthogonal Decomposition |
| RMSE | Root Mean Square Error |
| ROM | Reduced-Order Model |
| SBL | Stable Boundary Layer |
| WFR | Wind Field Reconstruction |
| Symbols | |
| Wind shear exponent | |
| Wind veer (°) | |
| Half Width Half Maximum (m) | |
| Lidar elevation angle (°) | |
| Lidar estimated yaw misalignment (°) | |
| Reconstruction errors | |
| POD eigenvalues | |
| POD spatial mode | |
| Lidar azimuth angle (°) | |
| Blade rotational speed (rpm) | |
| D | Rotor diameter |
| G | Gappiness |
| L | Obhukov length (m) |
| M | Dimensions of the reduced-order reconstructions |
| N | Dimensions of the full reconstructions |
| n | Gappy-POD main iteration indices |
| Unit vector in the beam direction | |
| R | Covariance matrix |
| Lidar estimated vertical shear () | |
| s | Gappy-POD sub-iteration indices |
| TI | Turbulence intensity |
| Projected longitudinal wind speed (m/s) | |
| Hub height wind speed (m/s) | |
| Lidar estimated rotor effective longitudinal wind speed (m/s) | |
| V | Velocity snapshot matrix (m/s) |
| Fluctuating velocity field (m/s) | |
| Filled wind field (m/s) | |
| POD approximation of filled wind field (m/s) | |
| Gappy-POD reconstructed wind field at the end of iteration (m/s) | |
| Time averaged spatial velocity field (m/s) | |
| Converged Gappy-POD reconstruction | |
| Reference Gappy-POD reconstruction | |
| Line-of-sight velocity (m/s) | |
| Fitted line-of-sight of the three-parameter model (m/s) | |
| Location of valid measurement points | |
| Location of invalid points | |
| Friction velocity (m/s) | |
| Modal temporal evolution |
References
- Rettenmeier, A.; Martin, K.; Schlipf, D.; Kapp, S.; Anger, J.; Bischoff, O.; Hofs, M.; Hofsäß, M.; Kühn, M.; Rettenmeier, A.; et al. Prospects of Optimization of Energy Production by LIDAR Assisted Control of Wind Turbines. In Proceedings of the EWEA 2011 Conference Proceedings, Brussels, Belgium, 14–17 March 2011; pp. 1–10. [Google Scholar]
- Simley, E.; Fürst, H.; Haizmann, F.; Schlipf, D. Optimizing lidars for wind turbine control applications-Results from the IEA Wind Task 32 workshop. Remote Sens. 2018, 10, 863. [Google Scholar] [CrossRef] [Green Version]
- Dimitrov, N.; Borraccino, A.; Peña, A.; Natarajan, A.; Mann, J. Wind turbine load validation using lidar-based wind retrievals. Wind Energy 2019, 22, 1512–1533. [Google Scholar] [CrossRef]
- Conti, D.; Dimitrov, N.; Pena, A.; Herges, T. Probabilistic estimation of the Dynamic Wake Meandering model parameters using SpinnerLidar-derived wake characteristics. Wind Energy Sci. 2021, 6, 1117–1142. [Google Scholar] [CrossRef]
- Penã, A.; Mann, J.; Dimitrov, N. Turbulence characterization from a forward-looking nacelle lidar. Wind Energy Sci. 2017, 2, 133–152. [Google Scholar] [CrossRef] [Green Version]
- Held, D.P.; Mann, J. Lidar estimation of rotor-effective wind speed—An experimental comparison. Wind Energy Sci. 2019, 4, 421–438. [Google Scholar] [CrossRef] [Green Version]
- Borraccino, A.; Schlipf, D.; Haizmann, F.; Wagner, R. Wind field reconstruction from nacelle-mounted lidar short-range measurements. Wind Energy Sci. 2017, 2, 269–283. [Google Scholar] [CrossRef] [Green Version]
- Herges, T.G.; Maniaci, D.C.; Naughton, B.T.; Mikkelsen, T.; Sjöholm, M. High resolution wind turbine wake measurements with a scanning lidar. J. Phys. Conf. Ser. 2017, 854, 012021. [Google Scholar] [CrossRef] [Green Version]
- Mikkelsen, T.; Angelou, N.; Hansen, K.; Sjöholm, M.; Harris, M.; Slinger, C.; Hadley, P.; Scullion, R.; Ellis, G.; Vives, G. A spinner-integrated wind lidar for enhanced wind turbine control. Wind Energy 2013, 16, 625–643. [Google Scholar] [CrossRef] [Green Version]
- Wentzel, D.G. On the spectrum of turbulence. In Physics of Fluids; The Royal Society: London, UK, 1958; Volume 1, pp. 213–214. [Google Scholar] [CrossRef]
- Kapp, S. Lidar Based Reconstruction of Wind Fields Additionally, Applications for Wind Turbine Control. Ph.D. Thesis, Carl von Ossietzky Universität Oldenburg, Oldenburg, Germany, 2017. [Google Scholar]
- Raach, S.; Schlipf, D.; Haizmann, F.; Cheng, P.W. Three dimensional dynamic model based wind field reconstruction from lidar data. J. Phys. Conf. Ser. 2014, 524, 12005. [Google Scholar] [CrossRef] [Green Version]
- Schlipf, D.; Rettenmeier, A.; Haizmann, F.; Hofsass, M.; Courtney, M.; Cheng, P.W. Model based wind vector field reconstruction from lidar data. In Proceedings of the 11th German Wind Energy Conference DEWEK 2012, Bremen, Germany, 7–8 November 2012. [Google Scholar] [CrossRef]
- Scholbrock, A.; Fleming, P.; Fingersh, L.; Wright, A.; Schlipf, D.; Haizmann, F.; Belen, F. Field Testing LIDAR-Based Feed-Forward Controls on the NREL Controls Advanced Research Turbine. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013; IEEE, American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2013; Volume 2, pp. 5–28. [Google Scholar] [CrossRef] [Green Version]
- Guillemin, F.; Nguyen, H.N.; Sabiron, G.; Di Domenico, D.; Boquet, M. Real-time three dimensional wind field reconstruction from nacelle LiDAR measurements. J. Phys. Conf. Ser. 2018, 1037, 032037. [Google Scholar] [CrossRef]
- Sekar, A.P.K.; Van Dooren, M.F.; Mikkelsen, T.; Sjöholm, M.; Astrup, P.; Kühn, M. Evaluation of the LINCOM wind field reconstruction method with simulations and full-scale measurements. J. Phys. Conf. Ser. 2018, 1037, 52008. [Google Scholar] [CrossRef]
- Berkooz, G.; Holmes, P.; Lumley, J.L. The proper orthogonal, decomposition in the analysis of turbulent flows. Annu. Rev. Fluid Mech. 1993, 25, 539–575. [Google Scholar] [CrossRef]
- Holmes, P.; Lumley, J.L.; Berkooz, G.; Rowley, C.W. Turbulence, Coherent Structures, Dynamical Systems and Symmetry, 2nd ed.; Cambridge Monographs on Mechanics; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar] [CrossRef]
- Sirovich, L. Turbulence and the dynamics of coherent structures. I. Coherent structures. Q. Appl. Math. 1987, 45, 561–571. [Google Scholar] [CrossRef] [Green Version]
- Taira, K.; Brunton, S.L.; Dawson, S.T.; Rowley, C.W.; Colonius, T.; McKeon, B.J.; Schmidt, O.T.; Gordeyev, S.; Theofilis, V.; Ukeiley, L.S. Modal analysis of fluid flows: An overview. AIAA J. 2017, 55, 4013–4041. [Google Scholar] [CrossRef] [Green Version]
- Bastine, D.; Witha, B.; Wächter, M.; Peinke, J. Towards a simplified dynamic wake model using POD analysis. Energies 2015, 8, 895–920. [Google Scholar] [CrossRef] [Green Version]
- Andersen, S.J.; Sørensen, J.N.; Mikkelsen, R.F. Turbulence and entrainment length scales in large wind farms. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2017, 375, 20160107. [Google Scholar] [CrossRef] [Green Version]
- Bastankhah, M.; Porte-Agel, F. Wind tunnel study of the wind turbine interaction with a boundary-layer flow: Upwind region, turbine performance, and wake region. Phys. Fluids 2017, 29, 065105. [Google Scholar] [CrossRef]
- Saranyasoontorn, K.; Manuel, L. Low-dimensional representations of inflow turbulence and wind turbine response using Proper Orthogonal Decomposition. J. Sol. Energy Eng. Trans. ASME 2005, 127, 553–562. [Google Scholar] [CrossRef] [Green Version]
- Davoust, S.; Jehu, A.; Bouillet, M.; Bardon, M.; Vercherin, B.; Scholbrock, A.K.; Fleming, P.A.; Wright, A.D. Assessment and Optimization of Lidar Measurement Availability for Wind Turbine Control; Technical Report May; No. NREL/CP-5000-61332; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014. [Google Scholar]
- Everson, R.; Sirovich, L. Karhunen–Loève procedure for gappy data. J. Opt. Soc. Am. A 1995, 12, 1657. [Google Scholar] [CrossRef] [Green Version]
- Saini, P.; Arndt, C.M.; Steinberg, A.M. Development and evaluation of gappy-POD as a data reconstruction technique for noisy PIV measurements in gas turbine combustors. Exp. Fluids 2016, 57, 122. [Google Scholar] [CrossRef] [Green Version]
- Raben, S.G.; Charonko, J.J.; Vlachos, P.P. Adaptive gappy proper orthogonal decomposition for particle image velocimetry data reconstruction. Meas. Sci. Technol. 2012, 23, 025303. [Google Scholar] [CrossRef]
- Gunes, H.; Sirisup, S.; Karniadakis, G.E. Gappy data: To Krig or not to Krig? J. Comput. Phys. 2006, 212, 358–382. [Google Scholar] [CrossRef] [Green Version]
- Willcox, K. Unsteady flow sensing and estimation via the gappy proper orthogonal decomposition. Comput. Fluids 2006, 35, 208–226. [Google Scholar] [CrossRef] [Green Version]
- Venturi, D.; Karniadakis, G.E. Gappy data and reconstruction procedures for flow past a cylinder. J. Fluid Mech. 2004, 519, 315–336. [Google Scholar] [CrossRef] [Green Version]
- Oliver, M.A.; Webster, R. Kriging: A method of interpolation for geographical information systems. Int. J. Geogr. Inf. Syst. 1990, 4, 313–332. [Google Scholar] [CrossRef]
- Simley, E.; Pao, L.Y.; Frehlich, R.; Jonkman, B.; Kelley, N. Analysis of light detection and ranging wind speed measurements for wind turbine control. Wind Energy 2014, 17, 413–433. [Google Scholar] [CrossRef]
- Kapp, S.; Kühn, M. A five-parameter wind field estimation method based on spherical upwind lidar measurements. J. Phys. Conf. Ser. 2014, 555, 12112. [Google Scholar] [CrossRef] [Green Version]
- Sjöholm, M.; Mikkelsen, T.; Mann, J.; Enevoldsen, K.; Courtney, M. Spatial averaging-effects on turbulence measured by a continuous-wave coherent lidar. Meteorol. Z. 2009, 18, 281–287. [Google Scholar] [CrossRef]
- Mann, J.; Cariou, J.P.C.; Parmentier, R.M.; Wagner, R.; Lindelöw, P.; Sjöholm, M.; Enevoldsen, K. Comparison of 3D turbulence measurements using three staring wind lidars and a sonic anemometer. Meteorol. Z. 2009, 18, 135–140. [Google Scholar] [CrossRef]
- van Dooren, M.F. Doppler Lidar Inflow Measurements. In Handbook of Wind Energy Aerodynamics; Springer: Berlin/Heidelberg, Germany, 2021; pp. 1–34. [Google Scholar] [CrossRef]
- Maronga, B.; Gryschka, M.; Heinze, R.; Hoffmann, F.; Kanani-Sühring, F.; Keck, M.; Ketelsen, K.; Letzel, M.O.; Sühring, M.; Raasch, S. The Parallelized Large-Eddy Simulation Model (PALM) version 4.0 for atmospheric and oceanic flows: Model formulation, recent developments, and future perspectives. Geosci. Model Dev. 2015, 8, 2515–2551. [Google Scholar] [CrossRef] [Green Version]
- Deardorff, J.W. Stratocumulus-capped mixed layers derived from a three-dimensional model. Bound.-Layer Meteorol. 1980, 18, 495–527. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Buhl, M.L., Jr. FAST User’s Guide; Technical Report No. NREL/EL-500-38230; National Renewable Energy Laboratory: Golden, CO, USA, 2005. [Google Scholar]
- Krüger, S.; Steinfeld, G.; Kraft, M.; Lukassen, L.J. Validation of a coupled atmospheric–aeroelastic model system for wind turbine power and load calculations. Wind Energy Sci. 2022, 7, 323–344. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report February; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Lund, T.S.; Wu, X.; Squires, K.D. Generation of Turbulent Inflow Data for Spatially-Developing Boundary Layer Simulations. J. Comput. Phys. 1998, 140, 233–258. [Google Scholar] [CrossRef] [Green Version]
- Trabucchi, D. Lidar Measurements and Engineering Modelling of Wind Turbine Wakes. Ph.D. Thesis, Carl von Ossietzky Universitat Oldenburg, Oldenburg, Germany, 2020. [Google Scholar]
- Bauweraerts, P.; Meyers, J. Study of the energy convergence of the Karhunen-Loeve decomposition applied to the large-eddy simulation of a high-Reynolds-number pressure-driven boundary layer. Phys. Rev. Fluids 2020, 5, 114603. [Google Scholar] [CrossRef]
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Pearson Correlation Coefficient; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Kristensen, L.; Frandsen, S. Model for power spectra of the blade of a wind turbine measured from the moving frame of reference. J. Wind. Eng. Ind. Aerodyn. 1982, 10, 249–262. [Google Scholar] [CrossRef]
- Matsumoto, M.; Nishimura, T. Mersenne twister. ACM Trans. Model. Comput. Simul. 1998, 8, 3–30. [Google Scholar] [CrossRef] [Green Version]
- Ungurán, R.; Petrović, V.; Pao, L.Y.; Kühn, M. Uncertainty identification of blade-mounted lidar-based inflow wind speed measurements for robust feedback-feedforward control synthesis. Wind Energy Sci. 2019, 4, 677–692. [Google Scholar] [CrossRef] [Green Version]
- Bastine, D.; Vollmer, L.; Wächter, M.; Peinke, J. Stochastic wake modelling based on POD analysis. Energies 2018, 11, 612. [Google Scholar] [CrossRef] [Green Version]
- Iungo, G.V.; Santoni-Ortiz, C.; Abkar, M.; Porté-Agel, F.; Rotea, M.A.; Leonardi, S. Data-driven Reduced Order Model for prediction of wind turbine wakes. J. Phys. Conf. Ser. 2015, 625, 012009. [Google Scholar] [CrossRef]
- Debnath, M.; Santoni, C.; Leonardi, S.; Iungo, G.V. Towards reduced order modelling for predicting the dynamics of coherent vorticity structures within wind turbine wakes. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2017, 375, 20160108. [Google Scholar] [CrossRef]
- Bergmann, M.; Cordier, L.; Brancher, J.P. Optimal rotary control of the cylinder wake using proper orthogonal decomposition reduced-order model. Phys. Fluids 2005, 17, 097101. [Google Scholar] [CrossRef]
- Tadmor, G.; Oliver, L.; Noack, B.R.; Cordier, L.; Delville, J.; Bonnet, J.P.; Morzyński, M. Reduced-order models for closed-loop wake control. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2011, 369, 1513–1524. [Google Scholar] [CrossRef]
- Tallet, A.; Allery, C.; Leblond, C. Optimal flow control using a POD-based reduced-order model. Numer. Heat Transf. Part B Fundam. 2016, 70, 1–24. [Google Scholar] [CrossRef]
- Guo, M.; Hesthaven, J.S. Data-driven reduced order modeling for time-dependent problems. Comput. Methods Appl. Mech. Eng. 2019, 345, 75–99. [Google Scholar] [CrossRef]
- Peherstorfer, B.; Willcox, K. Dynamic data-driven reduced-order models. Comput. Methods Appl. Mech. Eng. 2015, 291, 21–41. [Google Scholar] [CrossRef]
- Vollmer, L.; Steinfeld, G.; Heinemann, D.; Kühn, M. Estimating the ake deflection donstream of a ind turbine in different atmospheric stabilities: An les study. Wind Energy Sci. 2016, 1, 129–141. [Google Scholar] [CrossRef] [Green Version]
- Tong, Z.; Li, Y. Real-Time Reconstruction of Contaminant Dispersion from Sparse Sensor Observations with Gappy POD Method. Energies 2020, 13, 1956. [Google Scholar] [CrossRef] [Green Version]
- Murray, N.E.; Seiner, J.M. The effects of Gappy POD on higher-order turbulence quantities. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | , (D) | (m/s) | (%) | (°) | (-) | (m) | L (m) |
|---|---|---|---|---|---|---|---|
| CBL | 64.9 × 32.4 × 16.2 | 10.1 | 11.9 | 0.8 | 0.09 | 0.0175 | −452 |
| SBL | 22.8 × 7.6 × 3.8 | 7.2 | 7.5 | 9.3 | 0.23 | 0.1 | 114.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kidambi Sekar, A.P.; van Dooren, M.F.; Rott, A.; Kühn, M. Lower Order Description and Reconstruction of Sparse Scanning Lidar Measurements of Wind Turbine Inflow Using Proper Orthogonal Decomposition. Remote Sens. 2022, 14, 2681. https://doi.org/10.3390/rs14112681
Kidambi Sekar AP, van Dooren MF, Rott A, Kühn M. Lower Order Description and Reconstruction of Sparse Scanning Lidar Measurements of Wind Turbine Inflow Using Proper Orthogonal Decomposition. Remote Sensing. 2022; 14(11):2681. https://doi.org/10.3390/rs14112681
Chicago/Turabian StyleKidambi Sekar, Anantha Padmanabhan, Marijn Floris van Dooren, Andreas Rott, and Martin Kühn. 2022. "Lower Order Description and Reconstruction of Sparse Scanning Lidar Measurements of Wind Turbine Inflow Using Proper Orthogonal Decomposition" Remote Sensing 14, no. 11: 2681. https://doi.org/10.3390/rs14112681
APA StyleKidambi Sekar, A. P., van Dooren, M. F., Rott, A., & Kühn, M. (2022). Lower Order Description and Reconstruction of Sparse Scanning Lidar Measurements of Wind Turbine Inflow Using Proper Orthogonal Decomposition. Remote Sensing, 14(11), 2681. https://doi.org/10.3390/rs14112681