
The Development of A Rigorous Model for Bathymetric Mapping from Multispectral Satellite-Images



Abstract
:1. Introduction
2. Rigorous Bathymetric Model
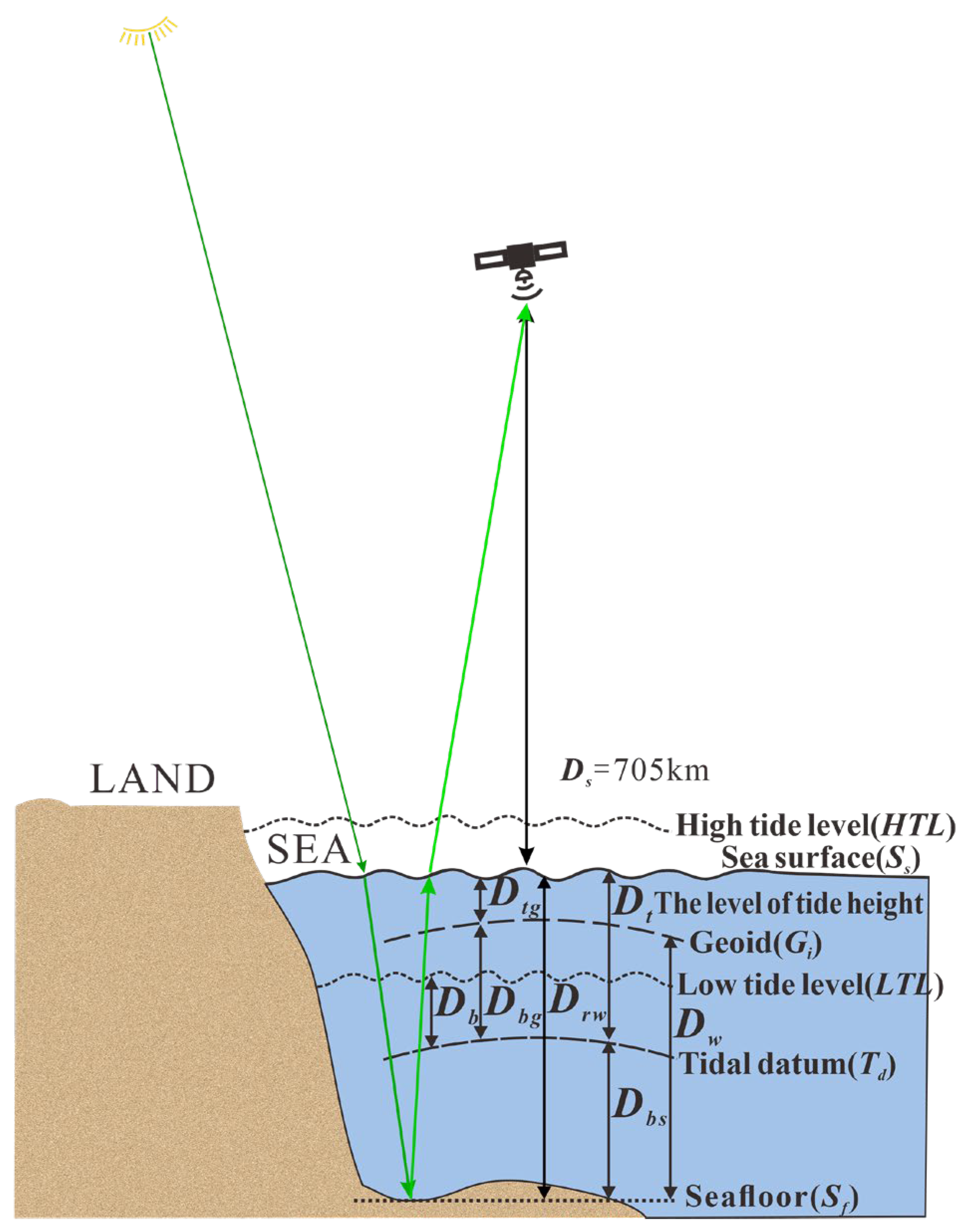
2.1. Tidal Fluctuation Impact
- (1)
- The tide height Dt at a certain time at the tidal station is obtained;
- (2)
- The distance Dbg from the geoid to tidal datum is obtained from the tide station;
- (3)
- Dtg is calculated through subtracting Dbg from Dt;
- (4)
- The unified geoid step of converting Drw to Dw at the epoch of satellite flight is calculated by subtracting Dtg from Drw;
- (5)
- Alternatively, the unified to the level of tide height step of converting Dw to Drw at the epoch of satellite flight is calculated as Drw by adding Dtg to Dw.
2.2. Rigorous Tidal Corrected Bathymetric Model
- ①
- Building a recurrence equation, i.e.,
- ②
- Solve the matix equation , i.e.,
- ③
- Solve the matix equation , i.e.,
3. Test Field and Data Set
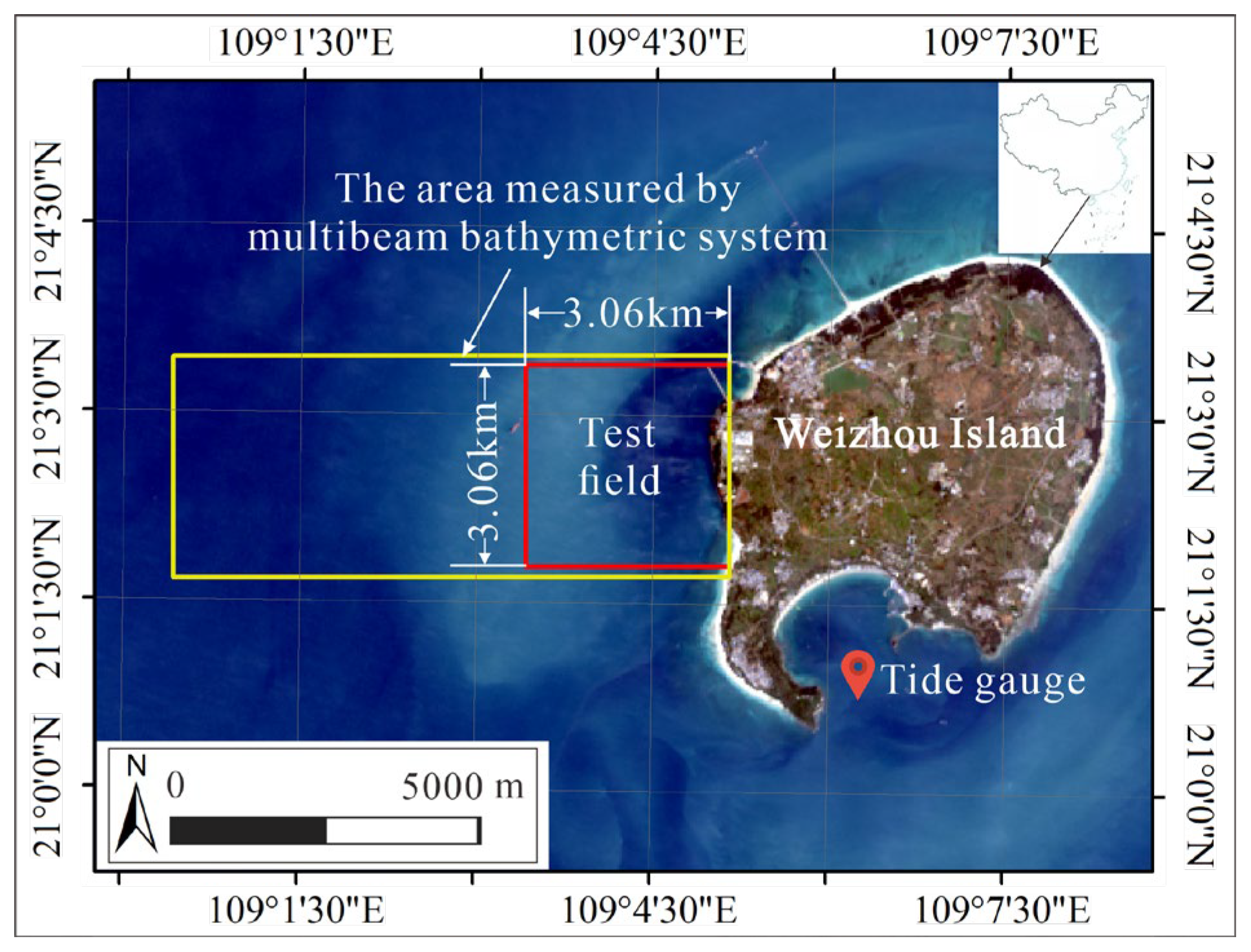
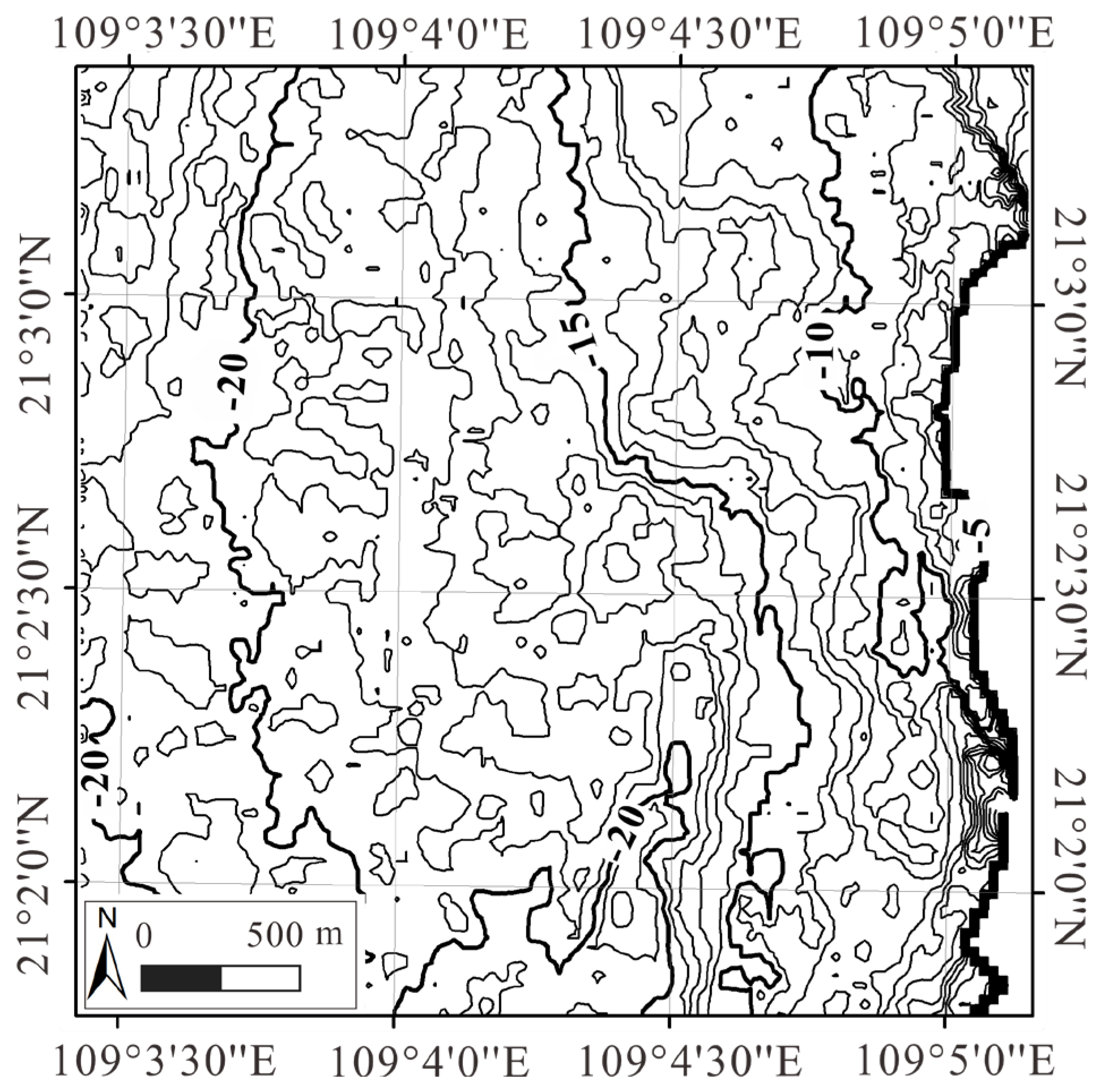
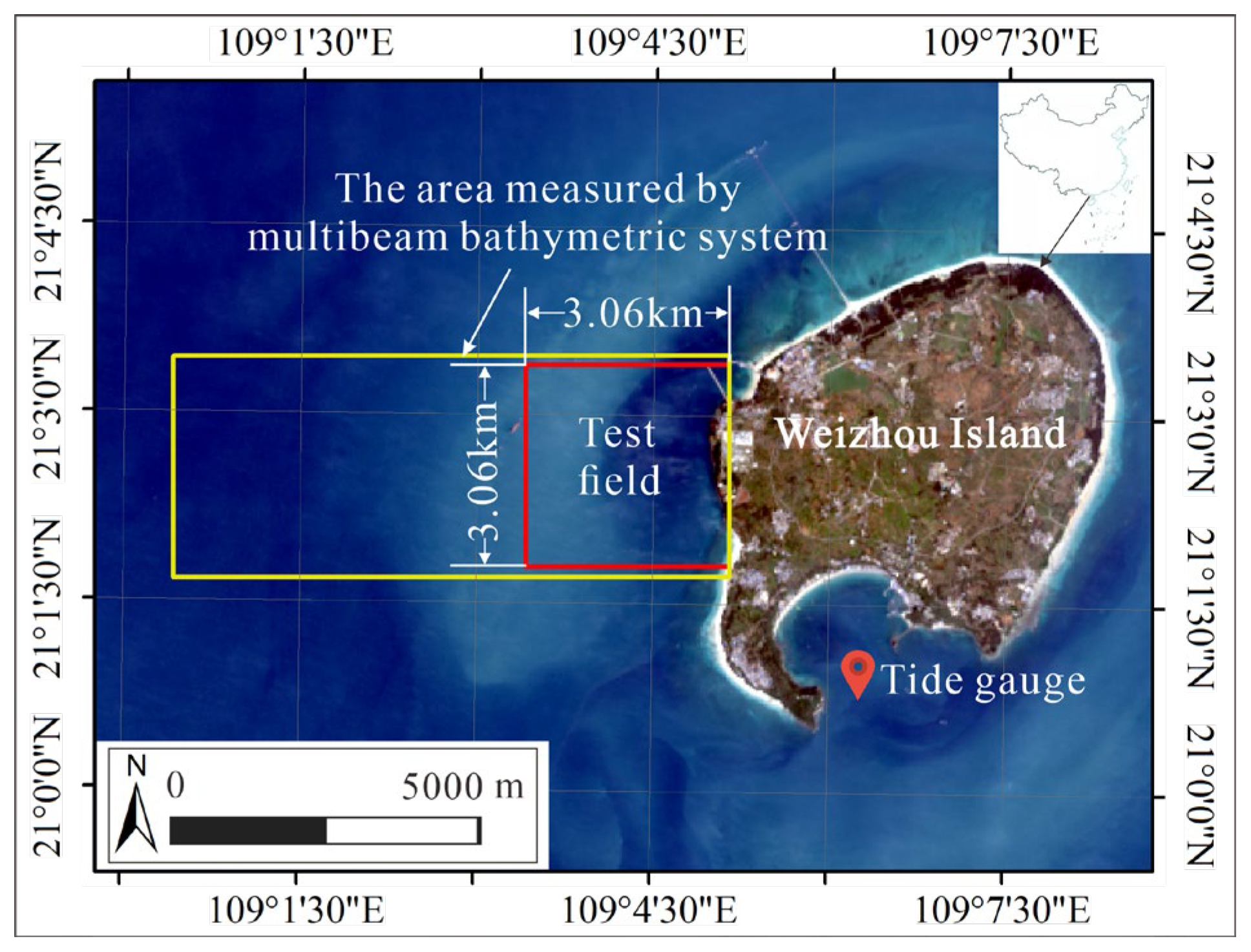
3.1. Test Field
3.2. Data Sets and Data Preprocessing
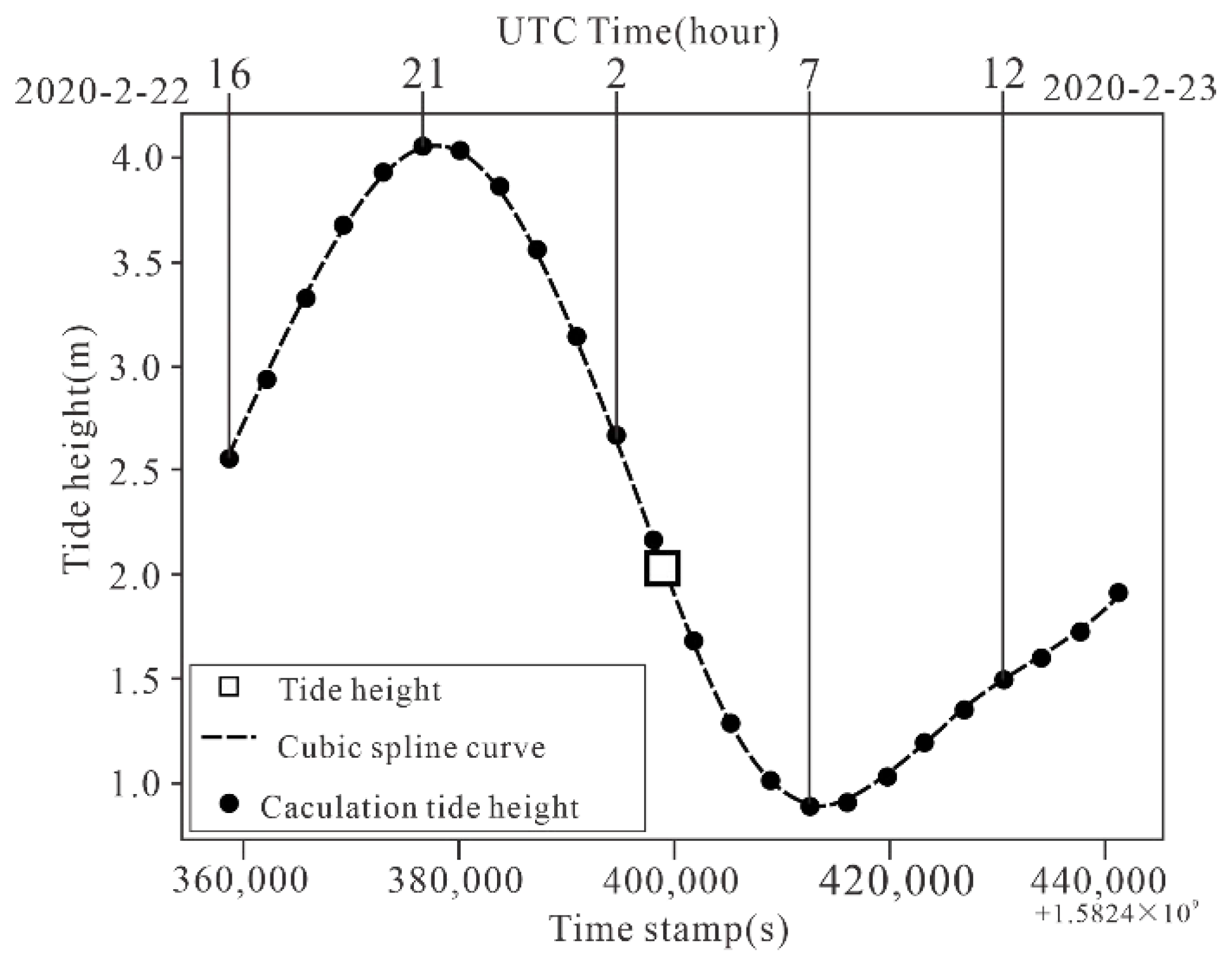
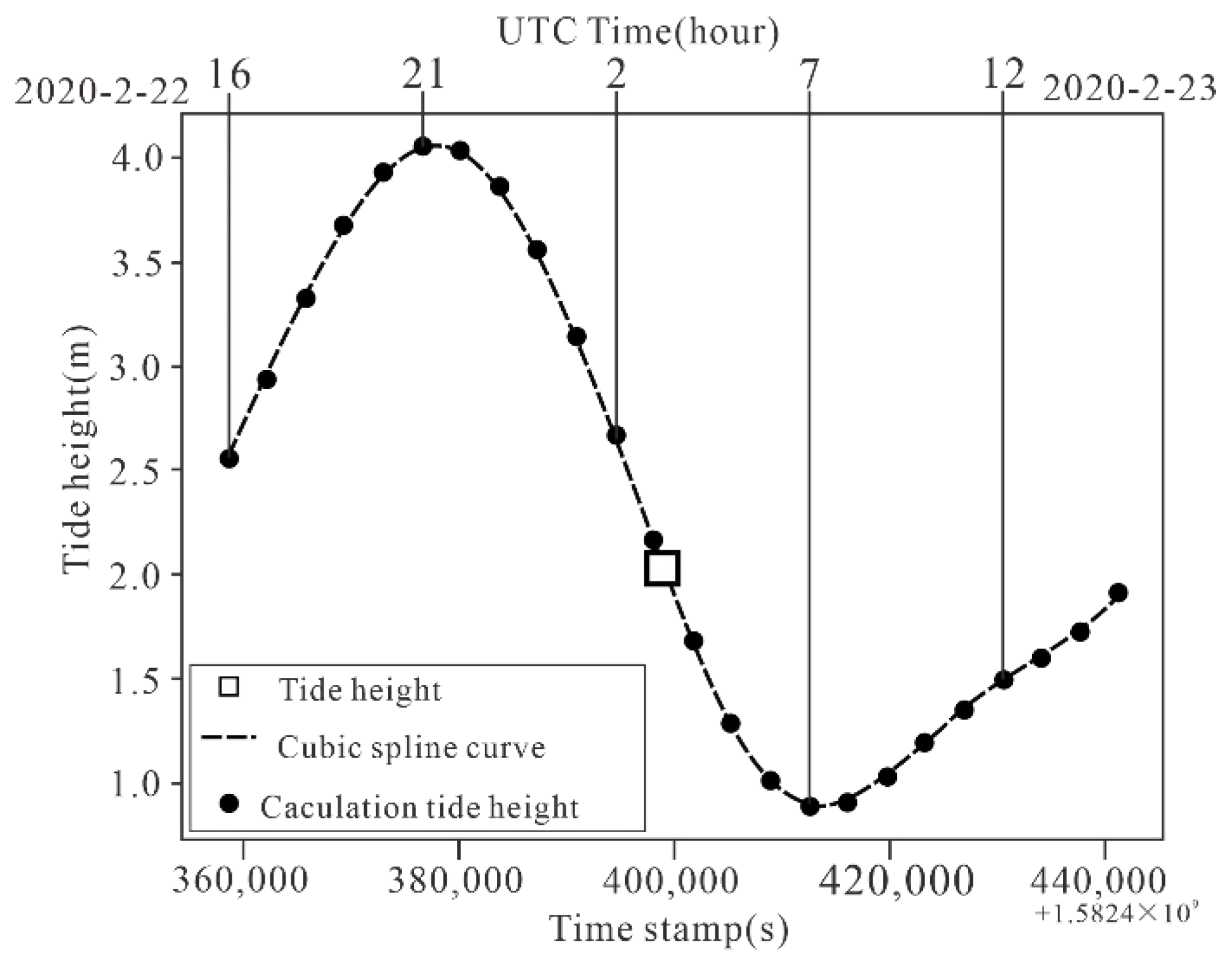
3.2.1. Tidal data and preprocessing
3.2.2. Water Depth (Reference Data) Measurement Using Multibeam Bathymetric System
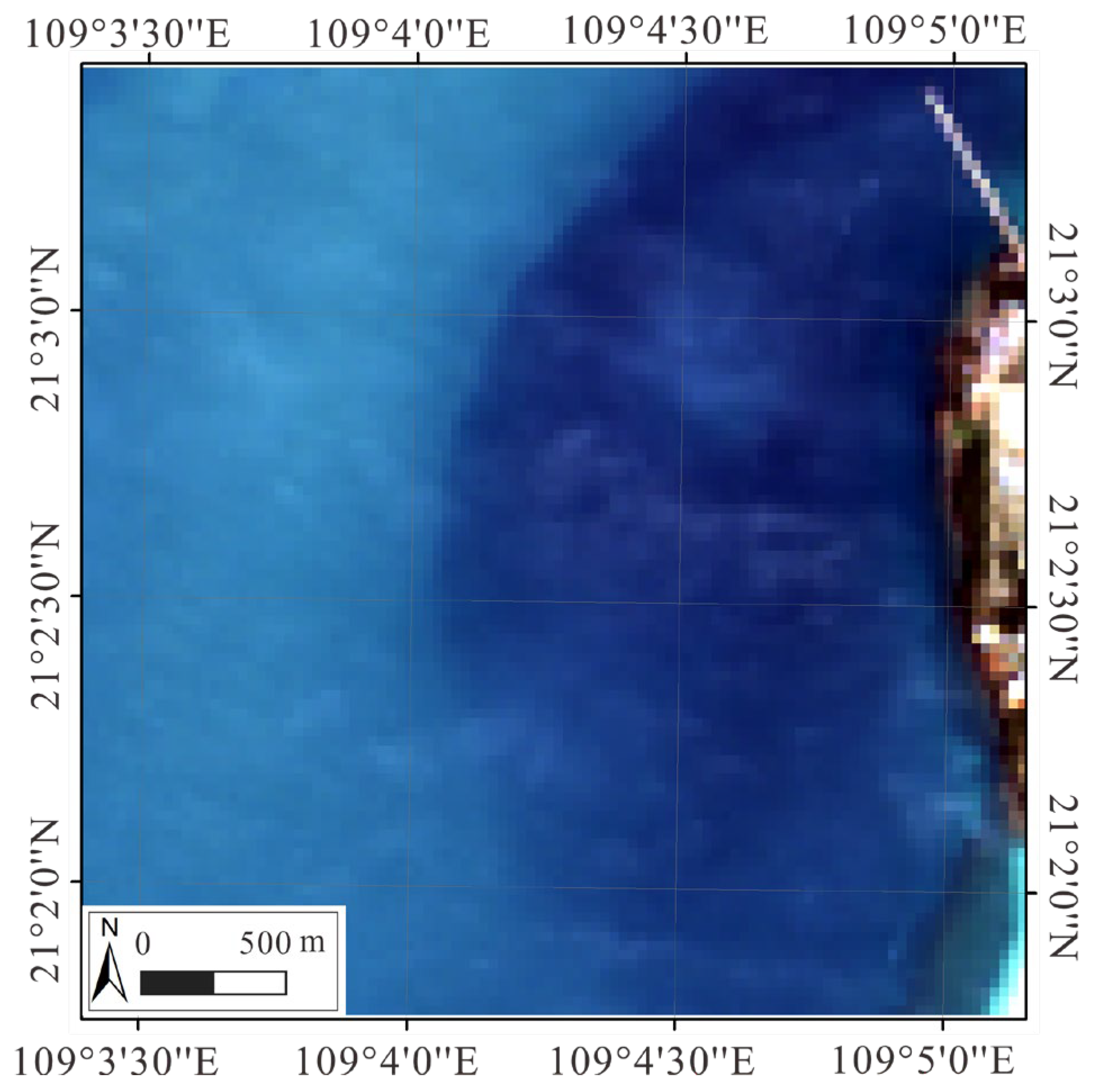
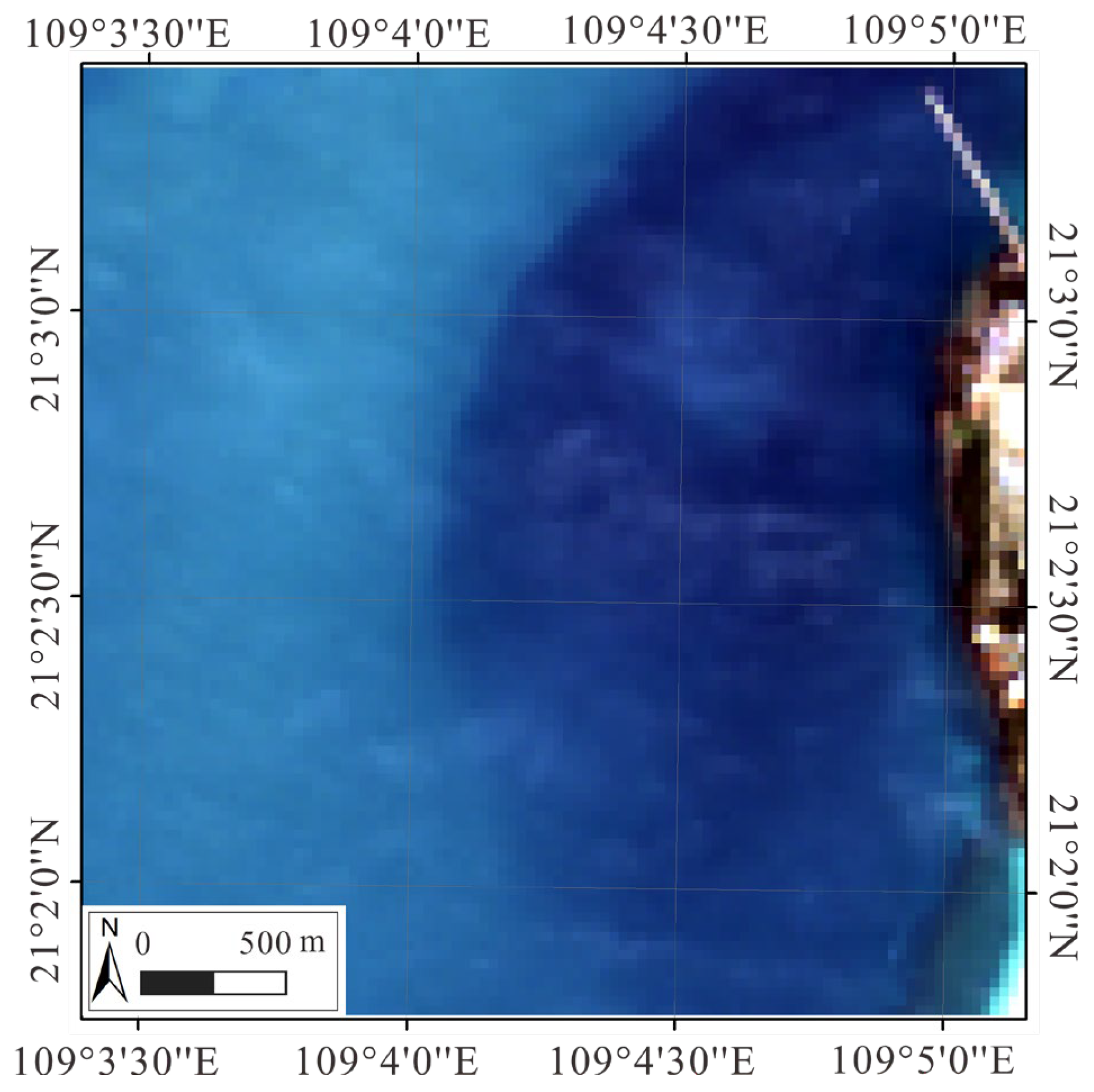
3.2.3. Satellite Images and Preprocessing
4. Results and Discussions
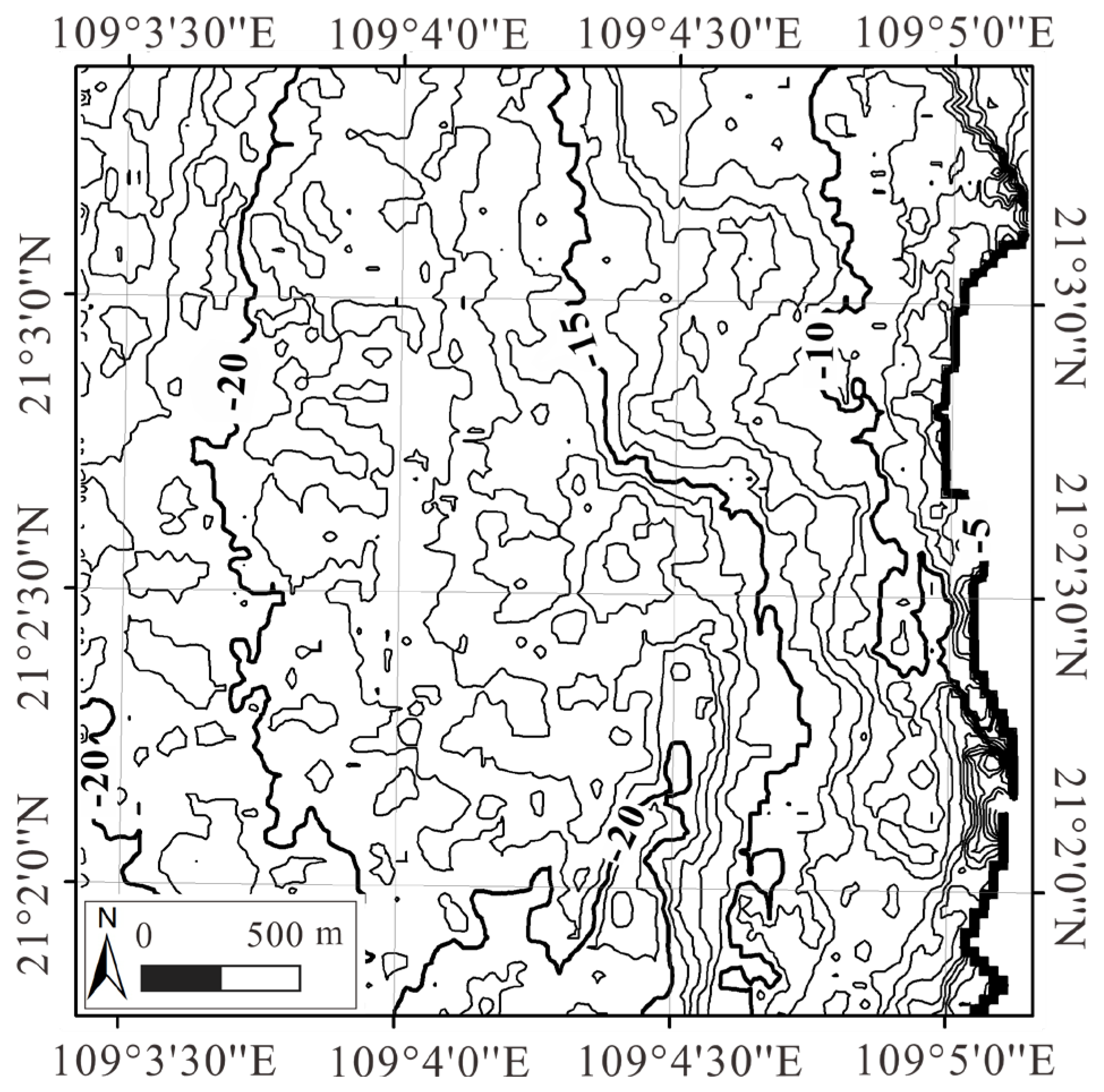
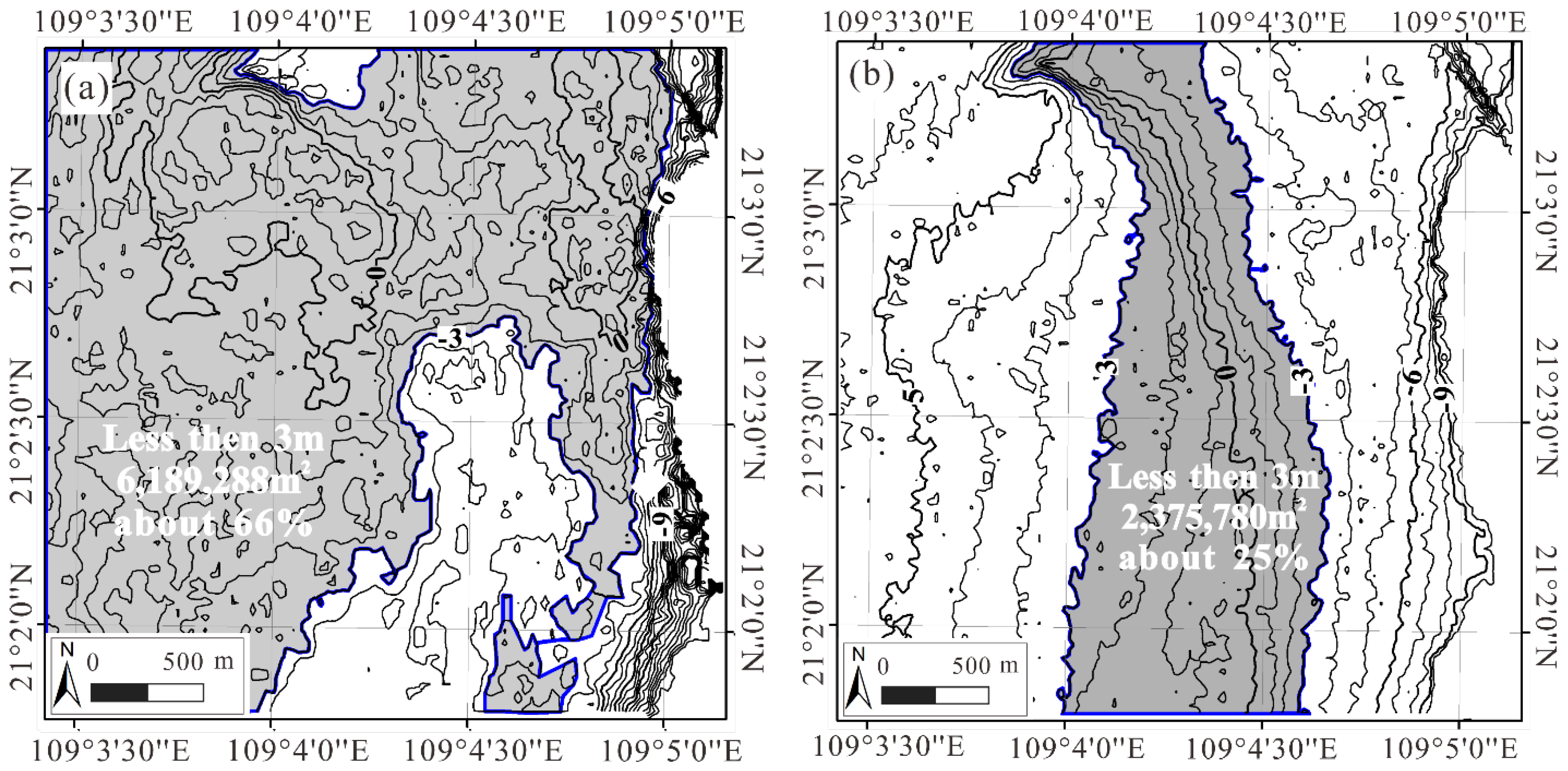
4.1. Bathymetric Retrieval Using our Model
4.2. Accuracy Analysis
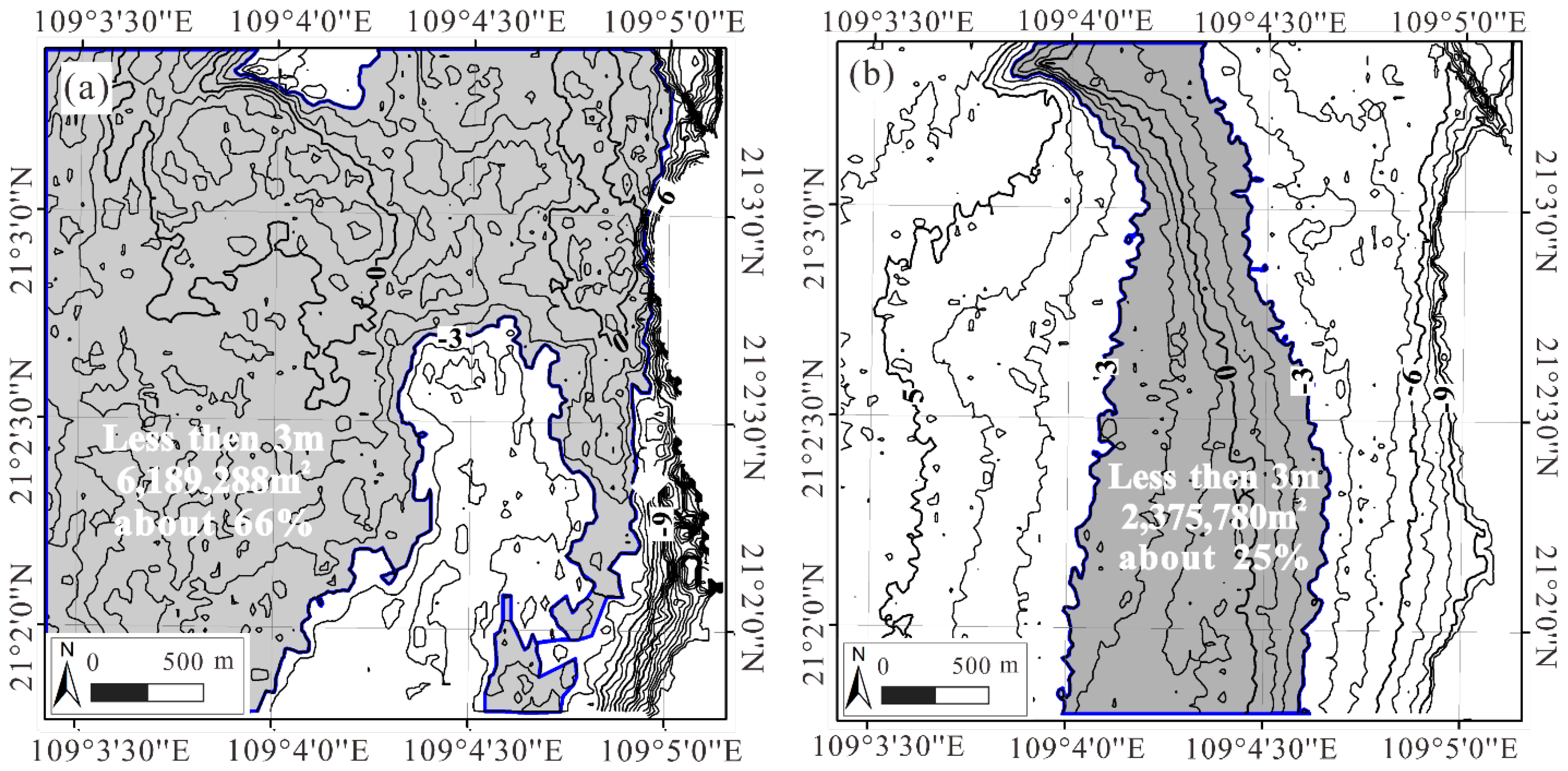
4.2.1. “Absolute” Error Analysis of Water Depth
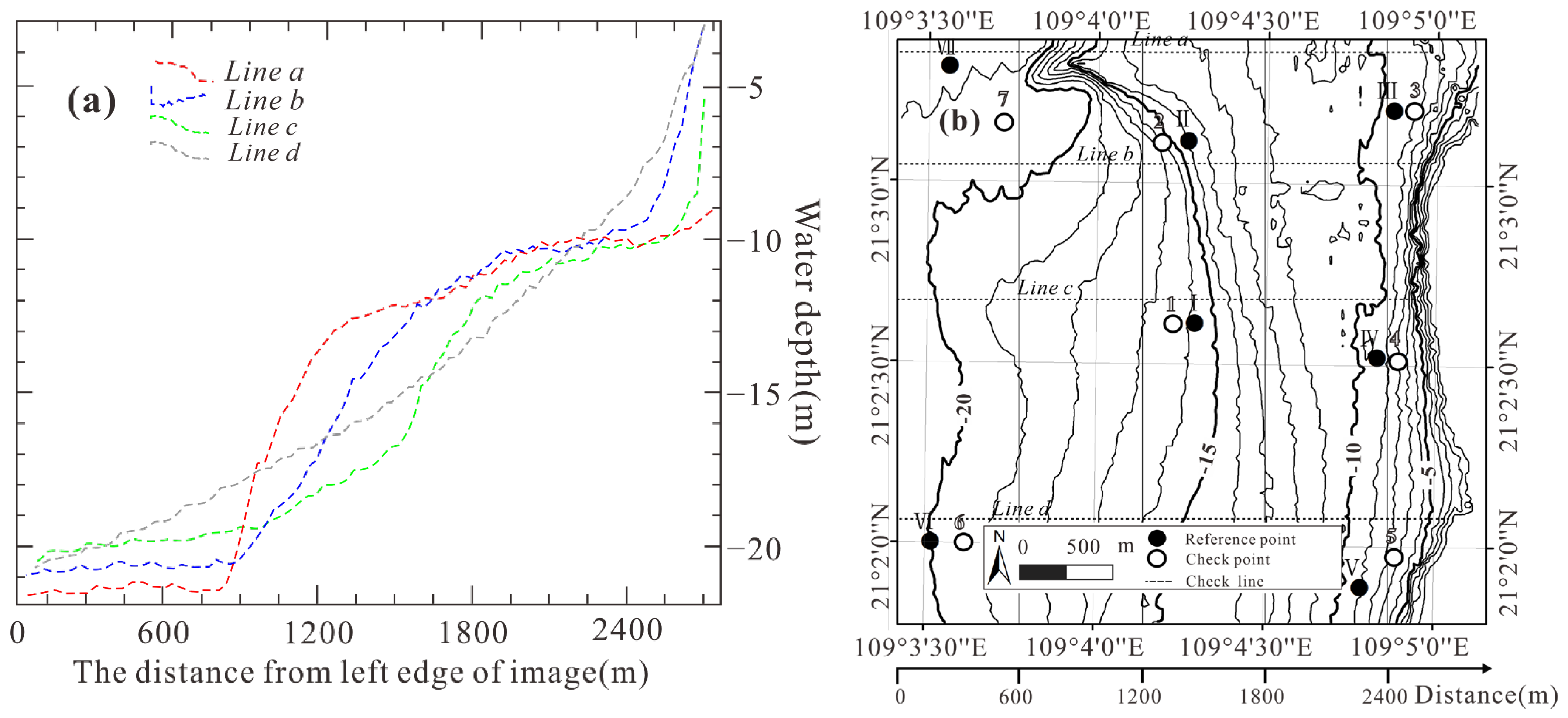
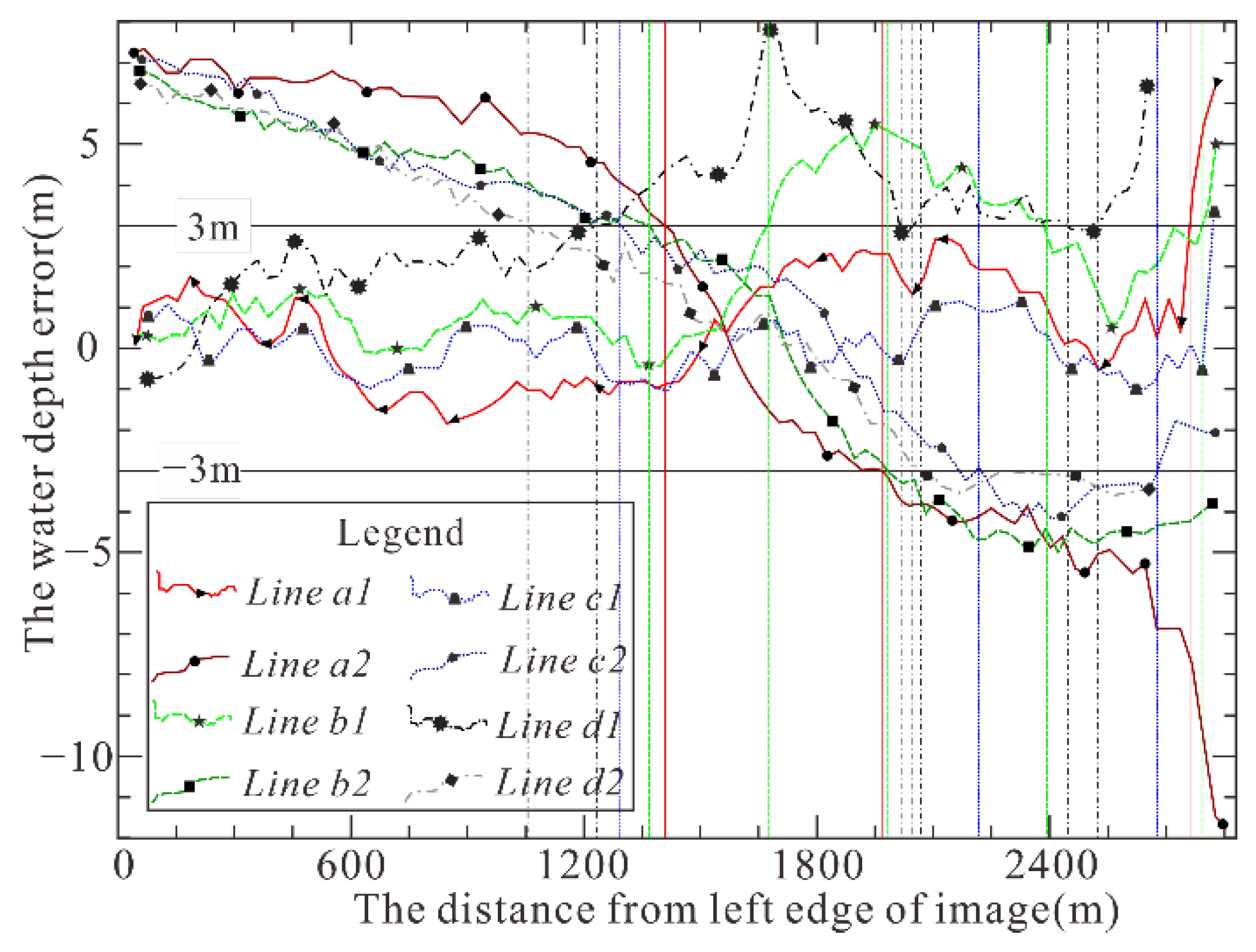
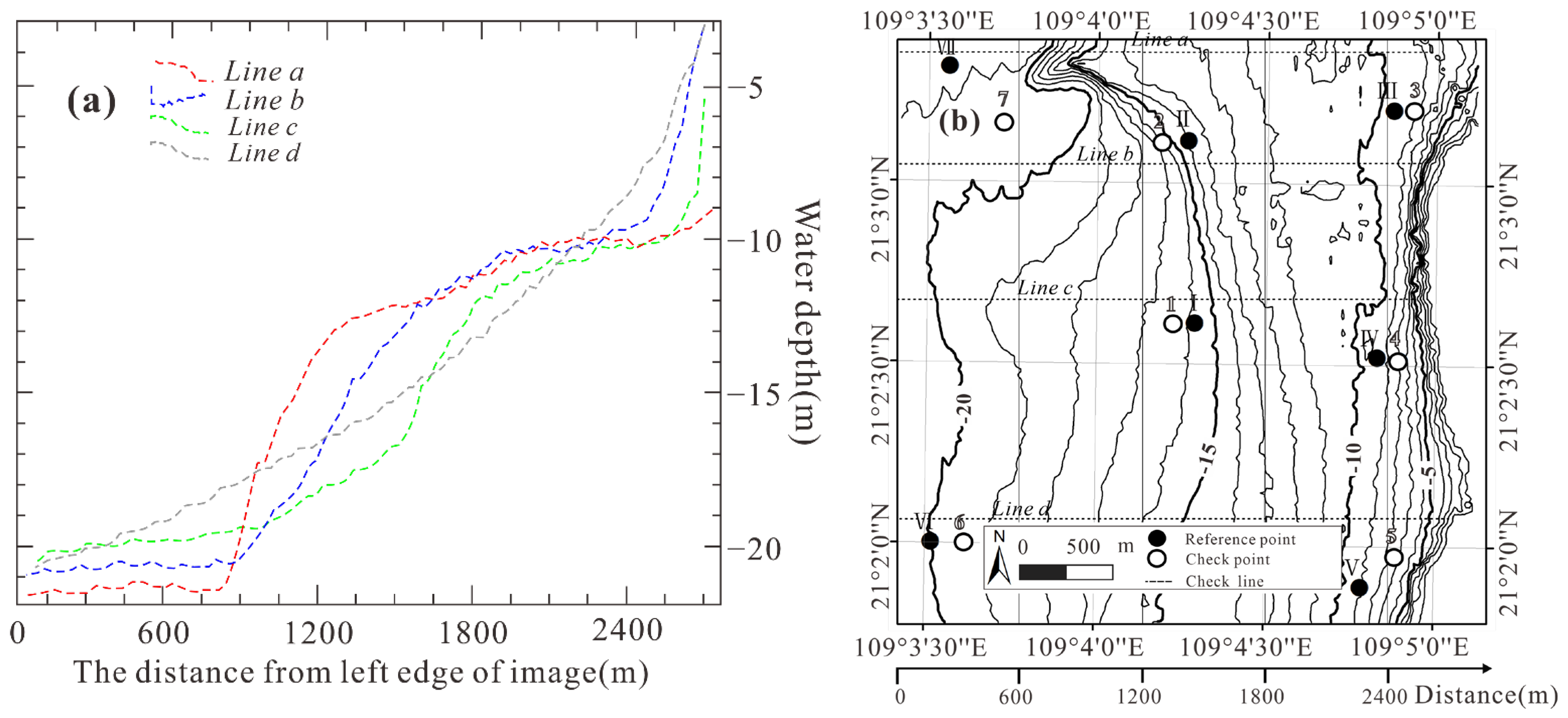
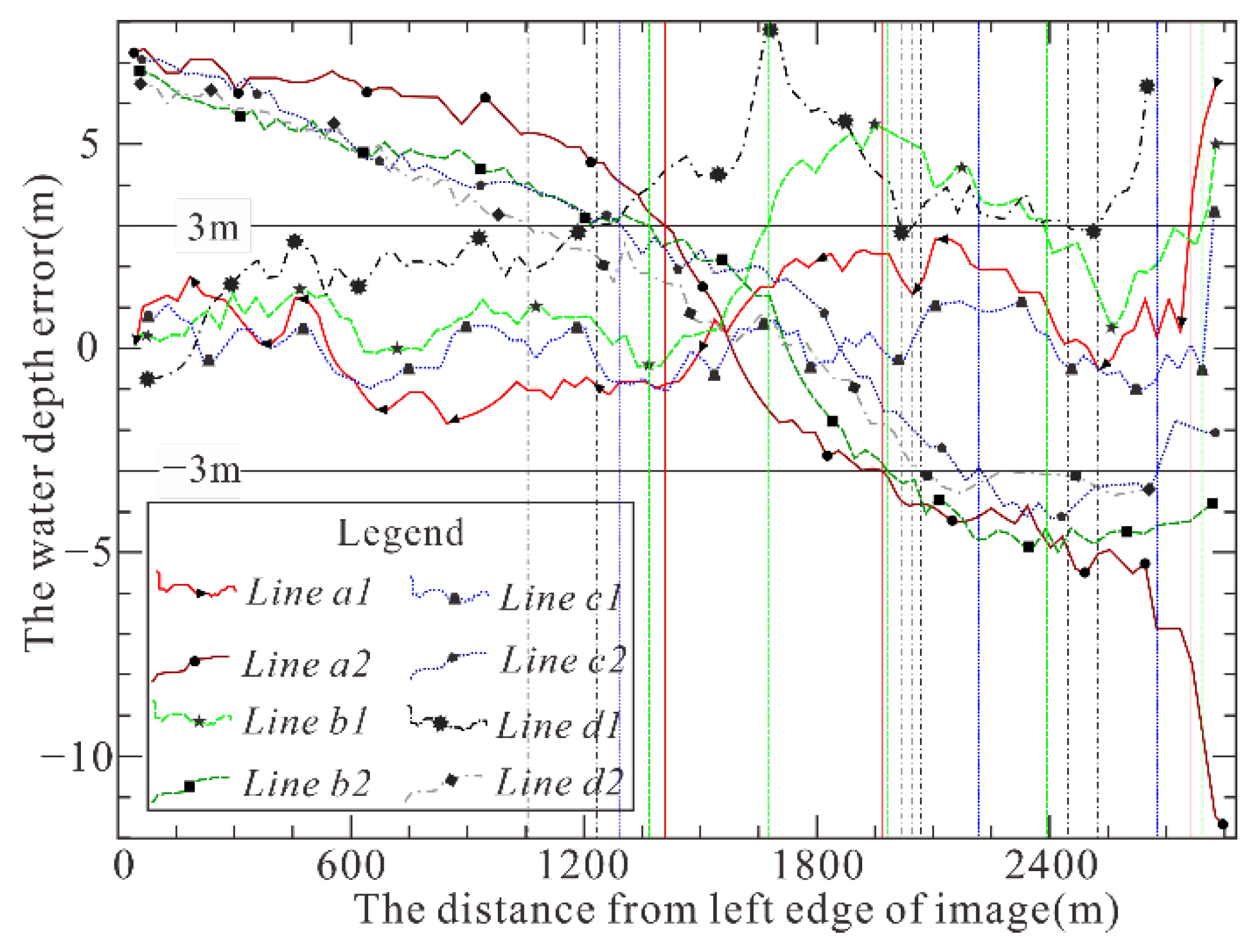
4.2.2. Accuracy Validation Using 4 Check Lines
- (1)
- The mean error of the water depths retrieved by our model was 2.30 m, respectively, while it was 7.71 m by the traditional model, respectively. This means that the mean error of water depth from our model decreased 67% relative to that from the traditional model.
- (2)
- The RMSE relative to “true” water depth by our model was 3.21, while by 7.59 in the traditional model. This means that the RMSE of water depth from our model decreased 56% relative to that from the traditional model.
4.2.3. Accuracy Validation Using Seven Checkpoints
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, G.; Xie, M. Coastal 3-D Morphological Change Analysis Using LiDAR Series Data: A Case Study of Assateague Island National Seashore. J. Coast. Res. 2009, 25, 435–447. [Google Scholar] [CrossRef]
- Zhou, G.; Li, C.; Zhang, D.; Liu, D.; Zhou, X.; Zhan, J. Overview of Underwater Transmission Characteristics of Oceanic LiDAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8144–8159. [Google Scholar] [CrossRef]
- Kuhn, C.; Valerio, A.D.; Ward, N.; Loken, L.; Sawakuchi, H.O.; Karnpel, M.; Richey, J.; Stadler, P.; Crawford, J.; Striegl, R.; et al. Performance of Landsat-8 and Sentinel-2 surface reflectance products for river remote sensing retrievals of chlorophyll-a and turbidity. Remote Sens. Environ. 2019, 225, 104–118. [Google Scholar] [CrossRef] [Green Version]
- Zhu, W.; Yu, Q.; Tian, Y.; Becker, B.L.; Zheng, T.; Carrick, H.J. An assessment of remote sensing algorithms for colored dissolved organic matter in complex freshwater environments. Remote Sens. Environ. 2014, 140, 766–778. [Google Scholar] [CrossRef]
- Zhou, G.; Long, S.; Xu, J.; Zhou, X.; Song, B.; Deng, R.; Wang, C. Comparison analysis of five waveform decomposition algorithms for the airborne LiDAR echo signal. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7869–7880. [Google Scholar] [CrossRef]
- Zhou, G.; Deng, R.; Zhou, X.; Long, S.; Li, W.; Lin, G.; Li, X. Gaussian Inflection Point Selection for LiDAR Hidden Echo Signal Decomposition. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1. [Google Scholar] [CrossRef]
- Kogut, T.; Bakula, K. Improvement of Full Waveform Airborne Laser Bathymetry Data Processing based on Waves of Neighborhood Points. Remote Sens. 2019, 11, 1255. [Google Scholar] [CrossRef] [Green Version]
- Launeau, P.; Giraud, M.; Robin, M.; Baltzer, A. Full-Waveform LiDAR Fast Analysis of a Moderately Turbid Bay in Western France. Remote Sens. 2019, 11, 117. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Yang, X.; Xi, X.; Zhang, H.; Chen, S.; Peng, S.; Zhu, X. Evaluation of Footprint Horizontal Geolocation Accuracy of Spaceborne Full-Waveform LiDAR Based on Digital Surface Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2135–2144. [Google Scholar] [CrossRef]
- Zhang, Z.; Xie, H.; Tong, X.; Zhang, H.; Tang, H.; Li, B.; Wu, D.; Hao, X.; Liu, S.; Xu, X.; et al. A Combined Deconvolution and Gaussian Decomposition Approach for Overlapped Peak Position Extraction From Large-Footprint Satellite Laser Altimeter Waveforms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2286–2303. [Google Scholar] [CrossRef]
- Zhou, G.; Zhou, X.; Song, Y.; Xie, D.; Wang, L.; Yan, G.; Hu, M.; Liu, B.; Shang, W.; Gong, C.; et al. Design of Supercontinuum Laser Hyperspectral LiDAR (SCLaHS LiDAR). Int. J. Remote Sens. 2021, 42, 3731–3755. [Google Scholar] [CrossRef]
- Su, D.; Yang, F.; Ma, Y.; Wang, X.; Yang, A.; Qi, C. Propagated Uncertainty Models Arising From Device, Environment, and Target for a Small Laser Spot Airborne LiDAR Bathymetry and Its Verification in the South China Sea. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3213–3231. [Google Scholar] [CrossRef]
- Qi, J.; Gong, Z.; Yao, A.; Liu, X.; Li, Y.; Zhang, Y.; Zhong, P. Bathymetric-Based Band Selection Method for Hyperspectral Underwater Target Detection. Remote Sens. 2021, 13, 3798. [Google Scholar] [CrossRef]
- Botha, E.J.; Brando, V.E.; Dekker, A.G. Effects of Per-Pixel Variability on Uncertainties in Bathymetric Retrievals from High-Resolution Satellite Images. Remote Sens. 2016, 8, 459. [Google Scholar] [CrossRef] [Green Version]
- Salameh, E.; Frappart, F.; Almar, R.; Baptista, P.; Heygster, G.; Lubac, B.; Raucoules, D.; Almeida, L.P.; Bergsma, E.W.J.; Capo, S.; et al. Monitoring beach topography and nearshore bathymetry using spaceborne remote sensing: A review. Remote Sens. 2019, 11, 2212. [Google Scholar] [CrossRef] [Green Version]
- Zhou, G.; Zhou, X. Seamless Fusion of LiDAR and Aerial Imagery for Building Extraction. IEEE Trans. Geosci. Remote Sens. 2014, 2, 7393–7407. [Google Scholar] [CrossRef]
- Zhou, G. Urban High-Resolution Remote Sensing Algorithms and Modeling; CRC Press, Tylor & Francis Group: Boca Raton, FL, USA, 2021; pp. 3–9. [Google Scholar]
- Polcyn, F.C.; Lyzenga, D.R. Calculations of Water Depth from ERTS-MSS Data; Environmental Research Institute of Michigan: Ann Arbor, MI, USA, 1973. [Google Scholar]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 380–383. [Google Scholar] [CrossRef]
- Paredes, J.M.; Spero, R.E. Water depth mapping from passive remote sensing data under a generalized ratio assumption. Appl. Opt. 1983, 22, 1134–1135. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Lyzenga, D.R.; Malinas, N.P.; Tanis, F.J. Multispectral bathymetry using a simple physically based algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2251–2259. [Google Scholar] [CrossRef]
- Ma, S.; Tao, Z.; Yang, X.; Yu, Y.; Zhou, X.; Li, Z. Bathymetry Retrieval From Hyperspectral Remote Sensing Data in Optical-Shallow Water. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1205–1212. [Google Scholar] [CrossRef]
- Chen, B.; Yang, Y.; Xu, D.; Huang, E. A dual band algorithm for shallow water depth retrieval from high spatial resolution imagery with no ground truth. ISPRS-J. Photogramm. Remote Sens. 2019, 151, 1–13. [Google Scholar] [CrossRef]
- Zhang, D.; Guo, Q.; Cao, L.; Zhou, G.; Zhang, G.; Zhan, J. A Multiband Model With Successive Projections Algorithm for Bathymetry Estimation Based on Remotely Sensed Hyperspectral Data in Qinghai Lake. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6871–6881. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters. I. A semianalytical model. Appl. Opt. 1988, 37, 6329–6338. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L. Effect of spectral band numbers on the retrieval of water column and bottom properties from ocean color data. Appl. Opt. 2002, 41, 2191–2201. [Google Scholar] [CrossRef]
- Numerical Optics Ltd. Available online: https://www.numopt.com/hydrolight.html (accessed on 20 March 2020).
- Lafon, V.; Froidefond, J.; Lahet, F.; Castaing, P. SPOT shallow water bathymetry of a moderately turbid tidal inlet based on field measurements. Remote Sens. Environ. 2002, 81, 136–148. [Google Scholar] [CrossRef]
- Adler-Golden, S.M.; Acharya, P.K.; Berk, A.; Matthew, M.W.; Gorodetzky, D. Remote bathymetry of the littoral zone from AVIRIS, LASH, and QuickBird imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 337–347. [Google Scholar] [CrossRef]
- Klonowski, W.M.; Fearns, P.R.C.S.; Lynch, M.J. Retrieving key benthic cover types and bathymetry from hyperspectral imagery. J. Appl. Remote Sens. 2007, 1, 6656–6659. [Google Scholar] [CrossRef]
- Brando, V.E.; Anstee, J.M.; Wettle, M.; Dekker, A.G.; Phinn, S.R.; Roelfsema, C. A physics based retrieval and quality assessment of bathymetry from suboptimal hyperspectral data. Remote Sens. Environ. 2009, 113, 755–770. [Google Scholar] [CrossRef]
- Eugenio, F.; Marcello, J.; Martin, J. High-Resolution Maps of Bathymetry and Benthic Habitats in Shallow-Water Environments Using Multispectral Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3539–3549. [Google Scholar] [CrossRef]
- Petit, T.; Bajjouk, T.; Mouquet, P.; Rochette, S.; Vozel, B.; Delacourt, C. Hyperspectral remote sensing of coral reefs by semi-analytical model inversion—Comparison of different inversion setups. Remote Sens. Environ. 2017, 190, 348–365. [Google Scholar] [CrossRef]
- Huang, R.; Yu, K.; Wang, Y.; Wang, J.; Mu, L.; Wang, W. Bathymetry of the coral reefs of Weizhou Island based on multispectral satellite images. Remote Sens. 2017, 9, 750. [Google Scholar] [CrossRef] [Green Version]
- Mobley, C.D.; Sundman, L.K.; Davis, C.O.; Bowles, J.H.; Downes, T.V.; Leathers, R.A.; Montes, M.; Bissett, W.P.; Kohler, D.D.R.; Reid, R.P.; et al. Interpretation of hyperspectral remote-sensing imagery by spectrum matching and look-up tables. Appl. Opt. 2017, 44, 3576–3592. [Google Scholar] [CrossRef]
- Hedley, J.; Roelfsema, C.; Phinn, S.R. Efficient radiative transfer model inversion for remote sensing applications. Remote Sens. Environ. 2009, 113, 2527–2532. [Google Scholar] [CrossRef]
- Garcia, R.A.; Lee, Z.; Hochberg, E.J. Hyperspectral Shallow-Water Remote Sensing with an Enhanced Benthic Classifier. Remote Sens. 2018, 10, 147. [Google Scholar] [CrossRef] [Green Version]
- Gillis, D.B.; Bowles, J.H.; Montes, M.J.; Miller, W.D. Deriving bathymetry and water properties from hyperspectral imagery by spectral matching using a full radiative transfer model. Remote Sens. Lett. 2020, 11, 903–912. [Google Scholar] [CrossRef]
- Kerr, J.M.; Purkis, S. An algorithm for optically-deriving water depth from multispectral imagery in coral reef landscapes in the absence of ground-truth data. Remote Sens. Environ. 2018, 210, 307–324. [Google Scholar] [CrossRef]
- Xia, H.; Li, X.; Zhang, H.; Wang, J.; Lou, X.; Fan, K.; Shi, A.; Li, D. A Bathymetry Mapping Approach Combining Log-Ratio and Semianalytical Models Using Four-Band Multispectral Imagery Without Ground Data. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2695–2709. [Google Scholar] [CrossRef]
- Chu, S.; Cheng, L.; Ruan, X.; Zhuang, Q.; Zhou, X.; Li, M.; Shi, Y. Technical Framework for Shallow-Water Bathymetry with High Reliability and No Missing Data Based on Time-Series Sentinel-2 Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8745–8763. [Google Scholar] [CrossRef]
- Yu, D.C.; Wang, H. A new parallel LU decomposition method. IEEE Trans. Power Syst. 1990, 5, 303–310. [Google Scholar] [CrossRef]
- Qingyang, L.; Nengchao, W.; Dayi, Y. Numerical Analysis, 5th ed.; Tsinghua University Press: Beijing, China, 2008; pp. 159–161. [Google Scholar]
- Haber, S.; Stornetta, W.S. How to Time-Stamp a Digital Document. In Advances in Cryptology-CRYPTO’ 90. CRYPTO 1990; Lecture Notes in Computer Science; Menezes, A.J., Vanstone, S.A., Eds.; Springer: Berlin/Heidelberg, Germany, 1991; Volume 537, pp. 437–455. [Google Scholar]
- Zhou, G.; Huang, J.; Zhang, G. Evaluation of the wave energy conditions along the coastal waters of Beibu Gulf, China. Energy 2015, 85, 449–457. [Google Scholar] [CrossRef]
- Zhou, G.; Huang, J.; Yue, T.; Luo, Q.; Zhang, G. Temporal-spatial distribution of wave energy: A case study of Beibu Gulf, China. Renew. Energy 2015, 74, 344–356. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Time (Year-Month-Day Hour-Minute-Second) | Time Stamp (s) | Tide Height (m) | ID | Time (Year-Month-Day Hour-Minute-Second) | Time Stamp (s) | Tide Height (m) |
|---|---|---|---|---|---|---|---|
| 1 | 2020-02-22 16:00:00 | 1,582,358,400 | 2.55 | 13 | 2020-02-23 04:00:00 | 1,582,401,600 | 1.68 |
| 2 | 2020-02-22 17:00:00 | 1,582,362,000 | 2.93 | 14 | 2020-02-23 05:00:00 | 1,582,405,200 | 1.28 |
| 3 | 2020-02-22 18:00:00 | 1,582,365,600 | 3.32 | 15 | 2020-02-23 06:00:00 | 1,582,408,800 | 1.01 |
| 4 | 2020-02-22 19:00:00 | 1,582,369,200 | 3.67 | 16 | 2020-02-23 07:00:00 | 1,582,412,400 | 0.89 |
| 5 | 2020-02-22 20:00:00 | 1,582,372,800 | 3.92 | 17 | 2020-02-23 08:00:00 | 1,582,416,000 | 0.91 |
| 6 | 2020-02-22 21:00:00 | 1,582,376,400 | 4.05 | 18 | 2020-02-23 09:00:00 | 1,582,419,600 | 1.03 |
| 7 | 2020-02-22 22:00:00 | 1,582,380,000 | 4.03 | 19 | 2020-02-23 10:00:00 | 1,582,423,200 | 1.19 |
| 8 | 2020-02-22 23:00:00 | 1,582,383,600 | 3.86 | 20 | 2020-02-23 11:00:00 | 1,582,426,800 | 1.35 |
| 9 | 2020-02-23 00:00:00 | 1,582,387,200 | 3.55 | 21 | 2020-02-23 12:00:00 | 1,582,430,400 | 1.49 |
| 10 | 2020-02-23 01:00:00 | 1,582,390,800 | 3.14 | 22 | 2020-02-2313:00:00 | 1,582,434,000 | 1.60 |
| 11 | 2020-02-23 02:00:00 | 1,582,394,400 | 2.66 | 23 | 2020-02-23 14:00:00 | 1,582,437,600 | 1.72 |
| 12 | 2020-02-23 03:00:00 | 1,582,398,000 | 2.16 | 24 | 2020-02-23 15:00:00 | 1,582,441,200 | 1.91 |
| Power Requirements | Transceiver Cable Length | Maximum Band Angle | Data Output |
| 111/220 VAC, 50/60 Hz Average power 500 W | 25 m standard | 128° (140°) | Depth, side scan, and fragment, 7K data format |
| Along-Track Transmit Beam Width | Receive Beam Width of Across-Track | Horizontal Positioning Accuracy (RTK) | Length of Cable from LCU to Processor |
| 1°(±0.2°) at 400 kHz | 0.54°(±0.03°) at 400 kHz | 2–5 cm | N/A |
| Pulse Length | Maximum Ping Rate | Frequency | Work Depth |
| From 33–300 μs ec | 50 Hz (±1 Hz) | 400 kHz | 0.2–150 m |
| Wave Number | System Depth Limit | Bathymetric Resolution | Data Transmission |
| 512 EA/ED at 400 kHz | 25 m | 5 cm | Ethernet, 1 Gbit |
| Plane Coordinates | Vertical Datum | Projection Mode | 1.5° Band Projection | Scale |
|---|---|---|---|---|
| 2000 national geodetic coordinate system | 1985 National Height Datum | Gauss Kruger projection | Zone 71, central meridian 108.75° | 1:5000 |
| Plane Accuracy (95% Confidence) | Sounding Accuracy (95% Confidence) | 100% Seafloor Scanning | System Detection Capability |
|---|---|---|---|
| 2 m | 0.25 m | It has to be done | Characteristics of space objects > 1m3 |
| 0–20 m | 20–30 m |
|---|---|
| ±0.3 m | ±0.4 m |
| Point | The Water Depth Calculated from the Geoid (m) | Point | The Water Depth Calculated from the Geoid (m) |
|---|---|---|---|
| 1 | 15.89 | 5 | 20.13 |
| 2 | 14.11 | 6 | 20.03 |
| 3 | 9.76 | 7 | 21.58 |
| 4 | 9.99 |
| Model | Maximum Absolute Error (m) | Mean Absolute Error (m) | RMSE |
|---|---|---|---|
| Traditional model | 15.3 | 4.79 | 5.22 |
| Our model | 5 | 2.62 | 3.68 |
| Error decreasing rate | 54% | 45% | 30% |
| Model | Line a | Line b | Line c | Line d | ||||
|---|---|---|---|---|---|---|---|---|
| Mean Error (m) | RMSE | Mean Error (m) | RMSE | Mean Error (m) | RMSE | Mean Error (m) | RMSE | |
| Traditional model | 7.04 | 7.07 | 7.18 | 7.96 | 7.68 | 8.48 | 6.80 | 6.85 |
| Our model | 2.24 | 3.45 | 1.62 | 2.28 | 1.47 | 2.04 | 3.88 | 5.07 |
| Error decreasing rate | 68% | 51% | 77% | 71% | 80% | 76% | 43% | 26% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Zhou, G.; Su, S.; Cao, Q.; Tian, Z. The Development of A Rigorous Model for Bathymetric Mapping from Multispectral Satellite-Images. Remote Sens. 2022, 14, 2495. https://doi.org/10.3390/rs14102495
Xu J, Zhou G, Su S, Cao Q, Tian Z. The Development of A Rigorous Model for Bathymetric Mapping from Multispectral Satellite-Images. Remote Sensing. 2022; 14(10):2495. https://doi.org/10.3390/rs14102495
Chicago/Turabian StyleXu, Jiasheng, Guoqing Zhou, Sikai Su, Qiaobo Cao, and Zhou Tian. 2022. "The Development of A Rigorous Model for Bathymetric Mapping from Multispectral Satellite-Images" Remote Sensing 14, no. 10: 2495. https://doi.org/10.3390/rs14102495
APA StyleXu, J., Zhou, G., Su, S., Cao, Q., & Tian, Z. (2022). The Development of A Rigorous Model for Bathymetric Mapping from Multispectral Satellite-Images. Remote Sensing, 14(10), 2495. https://doi.org/10.3390/rs14102495