
An Enhanced Data-Driven Array Shape Estimation Method Using Passive Underwater Acoustic Data


Abstract

1. Introduction
1.1. Related Works
1.2. Contributions
1.3. Organization and Notation
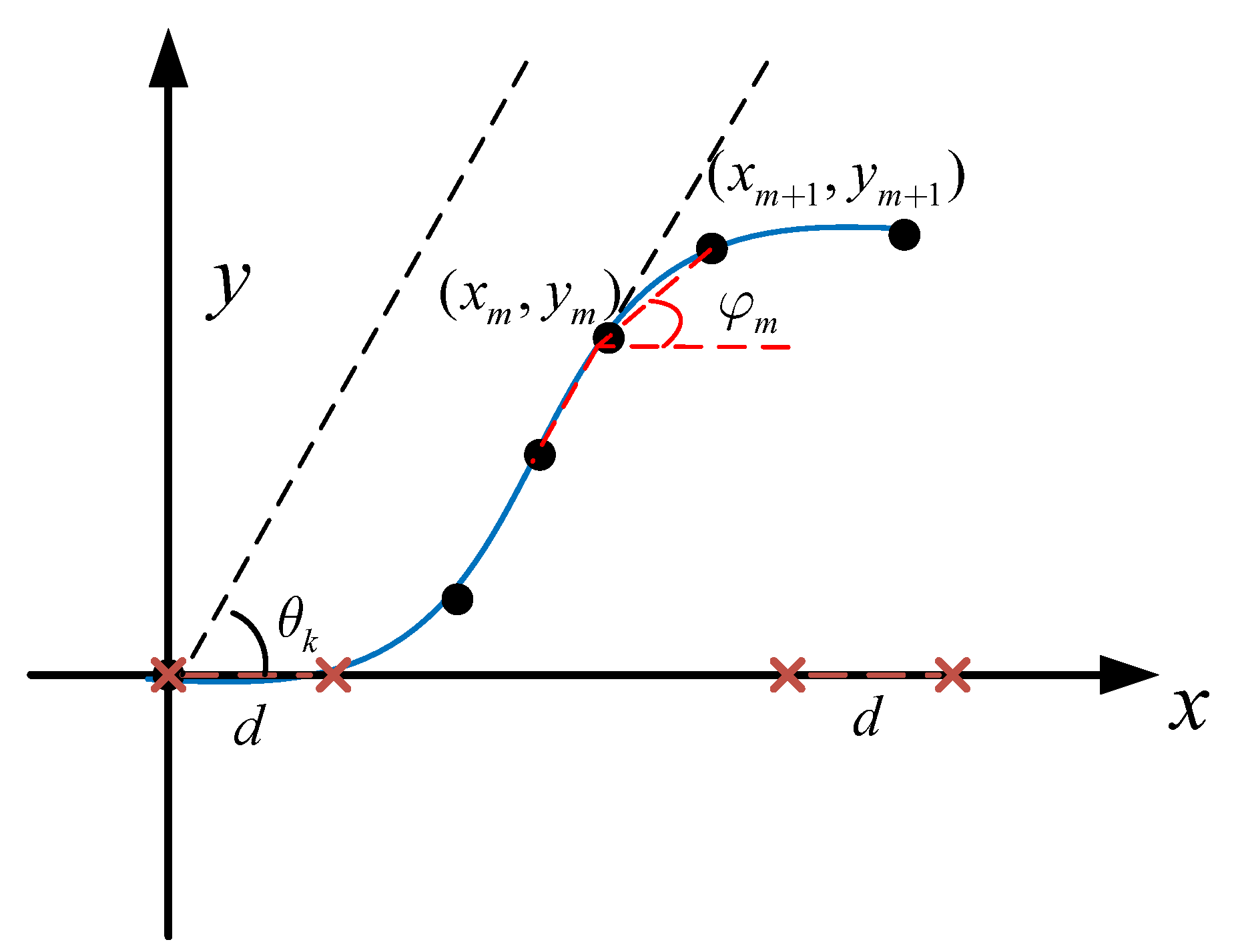
2. Underwater Acoustic Radiated Noise Model in the Distorted Array
3. Array Shape Estimation
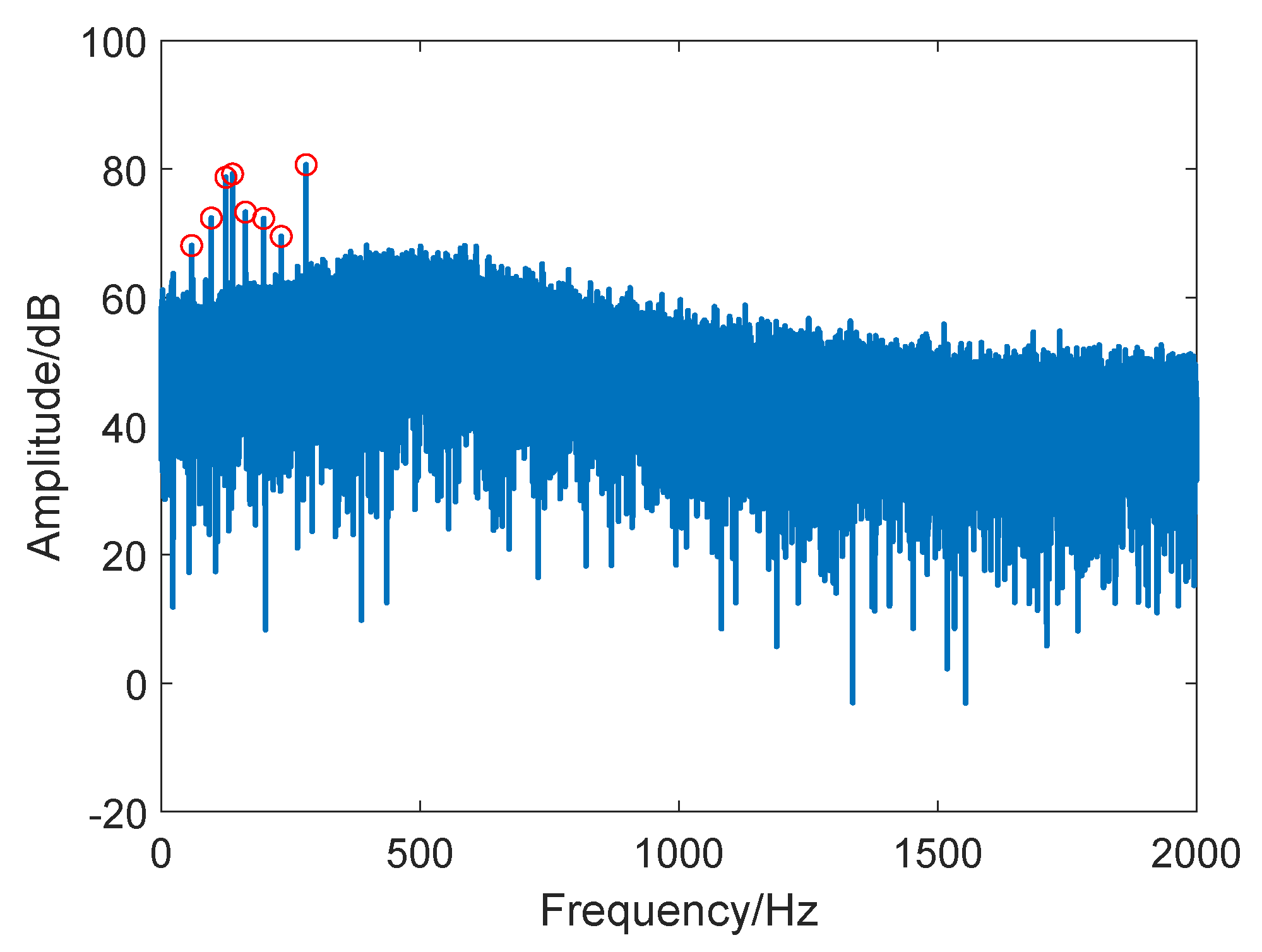
3.1. Phase Extraction Based on Detected Narrow-Band Frequencies
3.2. Proposed Weighted Outlier-Robust Kalman Smoother
3.3. Summary of Proposed Distorted Array Shape Estimation Scheme
3.4. Performance Bound Analysis
4. Simulations and Experiments
4.1. Simulations
4.1.1. Variance Estimates of Time-Delay Difference
4.1.2. Performance Comparison versus Bearings of the Radiated Noise Source
4.1.3. Performance Comparison versus SINR
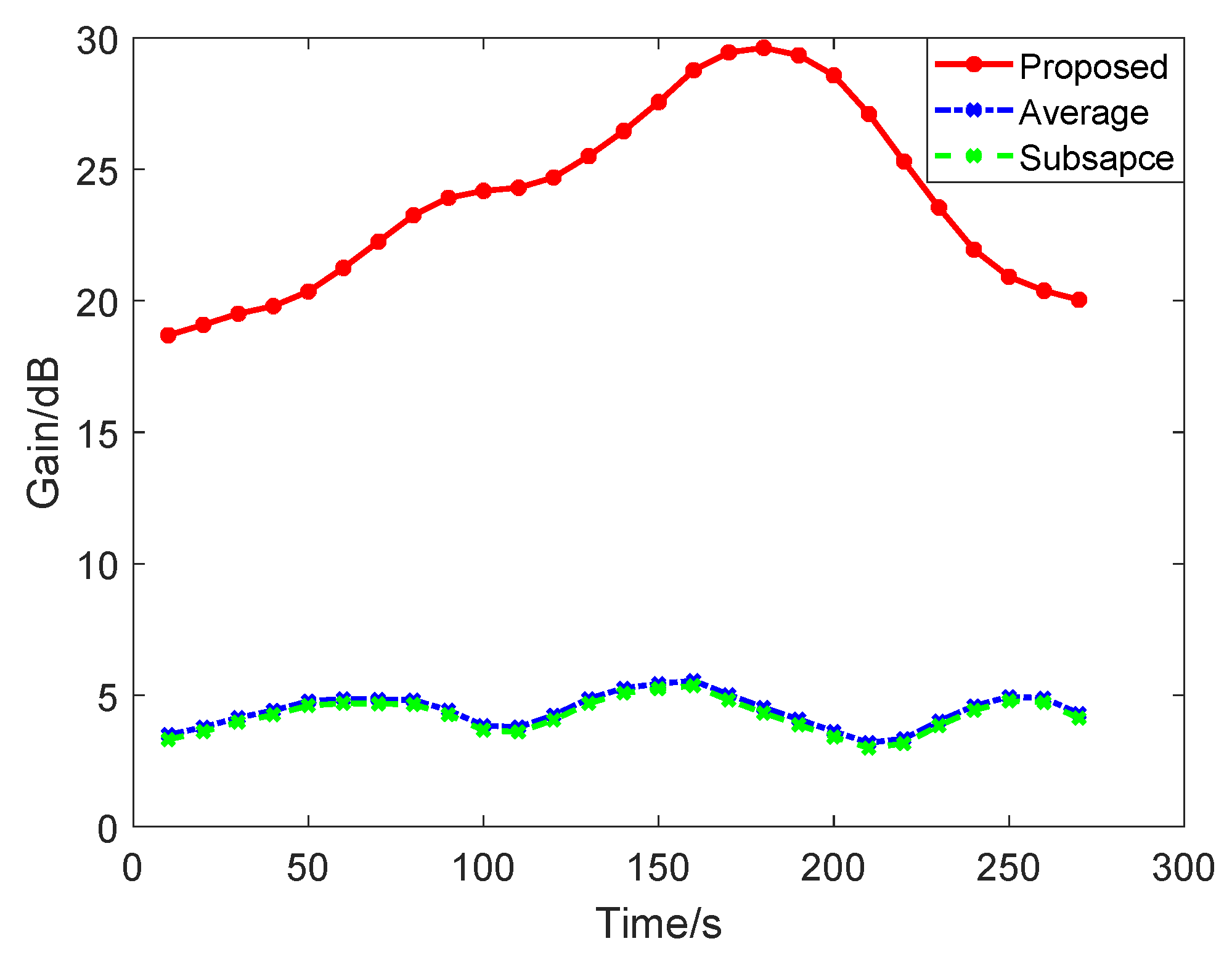
4.2. Experiments in Lake Trial Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schurman, I. Reverberation rejection with a dual-line towed array. IEEE J. Ocean. Eng. 1996, 21, 193–204. [Google Scholar] [CrossRef]
- Felisberto, P.; Jesus, S.M. Towed-array beamforming during ship’s maneuvering. Proc. Inst. Elect. Eng. Radar Sonar Navig. 1996, 143, 210–215. [Google Scholar] [CrossRef]
- Park, H.Y.; Lee, C.; Kang, H.G.; Youn, D.H. Generalization of the subspace-based array shape estimations. IEEE J. Ocean. Eng. 2004, 29, 847–856. [Google Scholar] [CrossRef]
- Hodgkiss, W. The effects of array shape perturbation on beamforming and passive ranging. IEEE J. Ocean. Eng. 1983, 8, 120–130. [Google Scholar] [CrossRef]
- Groen, J.; Beerens, S.P.; Doisy, Y. Shape and Doppler correction for a towed sonar array. In Proceedings of the Oceans’04 MTS/IEEE Techno-Ocean ’04, Kobe, Japan, 9–12 November 2004; Volume 2, pp. 613–620. [Google Scholar]
- Owsely, N.L. Shape estimation for a flexible underwater cable. IEEE EASCON 1981, 14, 16–19. [Google Scholar]
- Gray, D.; Anderson, B.; Bitmead, R. Towed array shape estimation using Kalman filters-theoretical models. IEEE J. Ocean. Eng. 1993, 18, 543–556. [Google Scholar] [CrossRef]
- Newhall, B.; Jenkins, J.; Dietz, J. Improved estimation of the shape of towed sonar arrays. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference, Como, Italy, 18–20 May 2004; pp. 873–876. [Google Scholar]
- Rockah, Y.; Schultheiss, P.M. Array shape calibration using sources in unknown locations—Part I: Far-field sources. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 286–299. [Google Scholar] [CrossRef]
- Weiss, A.J.; Friedlander, B. Array shape calibration using sources in unknown locations-a maximum likelihood approach. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 1958–1966. [Google Scholar] [CrossRef]
- Gray, D.A.; Wolf, W.O.; Riley, J.L. An eigenvector method for estimating the positions of the elements of an array of receivers. In Proceedings of the Conference Signal Processing Applic, Adelaide, Australia, 17–19 April 1989; pp. 391–393. [Google Scholar]
- Smith, J.J.; Leung, Y.H.; Cantoni, A. Sptatistics of the phase delays between array receivers estimated from the eigendecomposition of the signal correlation matrix. In Proceedings of the Conference IEEE International Conference on Acoustics, Speech and Signal Processing, Adelaide, SA, Australia, 19–22 April 1994; pp. 325–329. [Google Scholar]
- Bouvet, M. Beamforming of a distorted line array in the presence of uncertainties on the sensor positions. J. Acoust. Soc. Am. 1987, 81, 1833–1840. [Google Scholar] [CrossRef]
- Owsley, N.L.; Swope, G.R. Array shape determination using time delay estimation procedures. IEEE EASCON 1980, 13, 158–164. [Google Scholar]
- Odom, J.L.; Krolik, J.L. Passive towed array shape estimation using heading and acoustic data. IEEE J. Ocean. Eng. 2015, 40, 465–474. [Google Scholar] [CrossRef]
- Ferguson, B.G. Sharpness applied to the adaptive beamforming of acoustic data from a towed array of unknown shape. J. Acoust. Soc. Am. 1990, 88, 2695–2701. [Google Scholar] [CrossRef]
- Quinn, B.G.; Barrett, R.F.; Kootsookos, P.J.; Searle, S.J. The estimation of the shape of an array using a hidden Markov model. IEEE J. Ocean. Eng. 1993, 18, 557–564. [Google Scholar] [CrossRef]
- Wahl, D.E. Towed array shape estimation using frequency wavenumber data. IEEE J. Ocean. Eng. 1993, 18, 582–590. [Google Scholar] [CrossRef]
- Viberg, M.; Swindlehurst, A.L. A Bayesian approach to autocalibration for parametric array signal processing. IEEE Trans. Signal Process. 1994, 42, 3495–3507. [Google Scholar] [CrossRef]
- Ross, D.; Kuperman, W.A. Mechanics of underwater noise. J. Acoust. Soc. Am. 1989, 86, 1626. [Google Scholar] [CrossRef]
- Wales, S.C.; Heitmeyer, R.M. An ensemble source spectra model for merchant ship-radiated noise. J. Acoust. Soc. Am. 2002, 111, 1211–1231. [Google Scholar] [CrossRef] [PubMed]
- Information on the Swellex96 Experiment Data. Available online: http://swellex96.ucsd.edu/ (accessed on 15 July 2020).
- Wu, Q.; Xu, P.; Li, T.; Fang, S. Feature enhancement technique with distorted towed array in the underwater radiated noise. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings. Institute of Noise Control Engineering, Hong Kong, China, 27–30 August 2017; Volume 255, pp. 3824–3830. [Google Scholar]
- Ting, J.; Evangelos, T.; Stefan, S. A Kalman filter for robust outlier detection. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1514–1519. [Google Scholar]
- Ting, J.; Evangelos, T.; Stefan, S. Learning an outlier-robust Kalman filter. In Proceedings of the European Conference on Machine Learning, Warsaw, Poland, 17–21 September 2007; pp. 748–756. [Google Scholar]
- Dempster, A.; Laird, N.; Rubin, D. Maximum likelihood from incomplete data via the EM algorithm. J. R. Stat. Soc. Ser. B 1977, 39, 1–38. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006; pp. 423–517. [Google Scholar]
- Šimandl, M.; Královec, J.; Tichavsky, P. Filtering, predictive, and smoothing Cramer–Rao bounds for discrete-time nonlinear dynamic systems. Automatica 2001, 37, 1703–1716. [Google Scholar] [CrossRef]
- Tichavsky, P.; Muravchik, C.H.; Nehorai, A. Posterior Cramer–Rao bounds for discrete-time nonlinear filtering. IEEE Trans. Signal Process. 1998, 46, 1386–1396. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Given the observed array data . |
| (1) Calculate with respect to the kth source based on the hypothetical uniform linear array. |
| (2) Acquire the detected narrow-band frequencies with based on . |
| (3) Calculate time-delay differences vector . |
| (4) Estimate the time-delay differences using proposed Weighted Robust-Outlier Kalman Smoother: |
| a. Initialize hyperparameters and . |
| b. Initialize covariance for observation noise , variance of state noise . |
| c. Estimate time-delay differences using EM algorithm Equations (23)–(30). |
| (5) Perform array shape estimates with using Equations (34) and (35). |
| (6) Perform the beamforming and acquire the improved output signal . |
| Frequency/Hz | 59 | 97 | 125 | 163 | 198 | 232 | 280 |
|---|---|---|---|---|---|---|---|
| Amplitude error in average method/dB | 25.3 | 15.0 | 43.2 | 24.6 | 37.9 | 11.4 | 25.2 |
| Amplitude error in subspace method/dB | 24.9 | 15.7 | 49.7 | 24.8 | 32.8 | 11.3 | 22.6 |
| Amplitude error in proposed method/dB | 0.1 | 0.1 | 0.1 | 0.1 | 0.2 | 0.3 | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Zhang, H.; Lai, Z.; Xu, Y.; Yao, S.; Tao, J. An Enhanced Data-Driven Array Shape Estimation Method Using Passive Underwater Acoustic Data. Remote Sens. 2021, 13, 1773. https://doi.org/10.3390/rs13091773
Wu Q, Zhang H, Lai Z, Xu Y, Yao S, Tao J. An Enhanced Data-Driven Array Shape Estimation Method Using Passive Underwater Acoustic Data. Remote Sensing. 2021; 13(9):1773. https://doi.org/10.3390/rs13091773
Chicago/Turabian StyleWu, Qisong, Hao Zhang, Zhichao Lai, Youhai Xu, Shuai Yao, and Jun Tao. 2021. "An Enhanced Data-Driven Array Shape Estimation Method Using Passive Underwater Acoustic Data" Remote Sensing 13, no. 9: 1773. https://doi.org/10.3390/rs13091773
APA StyleWu, Q., Zhang, H., Lai, Z., Xu, Y., Yao, S., & Tao, J. (2021). An Enhanced Data-Driven Array Shape Estimation Method Using Passive Underwater Acoustic Data. Remote Sensing, 13(9), 1773. https://doi.org/10.3390/rs13091773