1. Introduction
The Elbe estuary is a mesotidal system with high temporal and spatial variability, where water quality parameters can change quickly over time during the tide and over short distances between the main fairway, side channels and intertidal mudflats. Water temperature is an important water quality parameter and serves as an indicator of dissolved oxygen content [
1,
2] which is in turn important for ecosystem and living conditions of riverine organisms. The distribution of water temperatures and mixing processes of water bodies in the Elbe estuary depend on the interaction of the tide and river flow with the topography (location of islands and channels, shallow areas and wadden flats), and the atmospheric conditions, especially insolation and wind [
3]. For an overview as complete as possible, measurements have to be conducted at several points during the tidal cycle and at a high spatial resolution. This study aims to evaluate the potential of airborne thermal infrared (TIR) imagers to measure water surface temperature during the tide and develop the necessary methodology for their correction and analysis. The TIR data sets are intended to evaluate temperature patterns over tidal mudflats and to validate a water quality model of the Elbe estuary, QSim [
4,
5].
Water surface temperature or sea surface temperature (SST) acquired by satellite data has been used frequently due to its availability for investigating boundary currents, studying fish and wildlife habitats, monitoring climate change (on a large scale) and coastal upwelling, where rising cold water brings nutrients to the surface [
6]. Satellite SSTs are also able to general map patterns and extensions of thermal plume signatures in coastal areas [
7], monitor heated effluent discharge from the nuclear power plant [
8] or to reconstruct river surface temperature and turbidity regimes of an estuary [
9]. However, for the aim of this study, their acquisition rate is too infrequent for resolving the tidal cycle, and the spatial resolution is too coarse.
Alternatively, thermal infrared (TIR) cameras on other platforms have been used for inland water streams and waterways. The absolute accuracy of uncooled, lightweight thermal sensors is low (typically
C/
) compared to in situ measurements (±0.1
C), thermal radiometry (±0.2
C) [
10] or calibrated thermal airplane or satellite sensors (±0.1
C). However, they have been often utilized where temperature patterns are relevant: to assess cold-water reservoirs and thermal refuges [
11,
12], to locate groundwater inputs and hyporheic upwelling [
13], to acquire maps of thermal heterogeneity and water surface temperature longitudinally and laterally across stream channel, river channels and wadden flats [
12,
14,
15,
16,
17]. In coastal areas, aerial TIR data acquired by small airplanes or unmanned aerial vehicles have proven to be an efficient method for mapping submarine groundwater discharge [
18,
19,
20,
21,
22].
When mapping the thermal landscape, the water temperature patterns fluctuating over time and varying on the river network [
23], fine-scale continuous temperature measurements are necessary to acquire the complete signal of the data, not only mean, minimum or maximum water temperatures [
14,
23]. Wawrzyniak et al. [
24] have shown that it is also possible to use this method for a larger spatial scale and several time points and measured patterns of diel fluctuations of water temperature.
In this research survey, the particular temporal and spatial element of interest within the thermal landscape, the investigated facet [
23], are the wadden flats/intertidal mudflats and how the water temperature changes during high and low tide. Here, the largest temperature differences are expected when the overflowing water is heated during the day and flowing in the stream channel during low tide. In 2014, in situ temperature measurements have shown that during the summer, distinctive temperature differences of about 1.5
C can occur between the water in channels and over the mudflats as soon as the mudflats are covered with water despite the frequent flooding and water movement during the tides. However, the measurements in the mudflats were complicated by the fluctuating water levels and a limited number of in situ measurement locations, which allowed for only a limited picture of the water movement and mixing processes. Hence, the aim of this research study was (i) to test tools and platforms (specifically a gyrocopter and a hexacopter) to acquire water surface temperature patterns of the intertidal mudflats during high tide at a high spatial and temporal resolution, (ii) to develop a processing workflow for correction and to achieve a high relative and absolute accuracy and (iii) to derive temperature products that allow for an in-depth analysis of mixing processes as well as comparison with results of the water quality model QSim. A specific aspect of this survey was also the use of low-cost platforms and thermal imagers to minimize the actual costs of data acquisition and to allow for potential regular monitoring in the future.
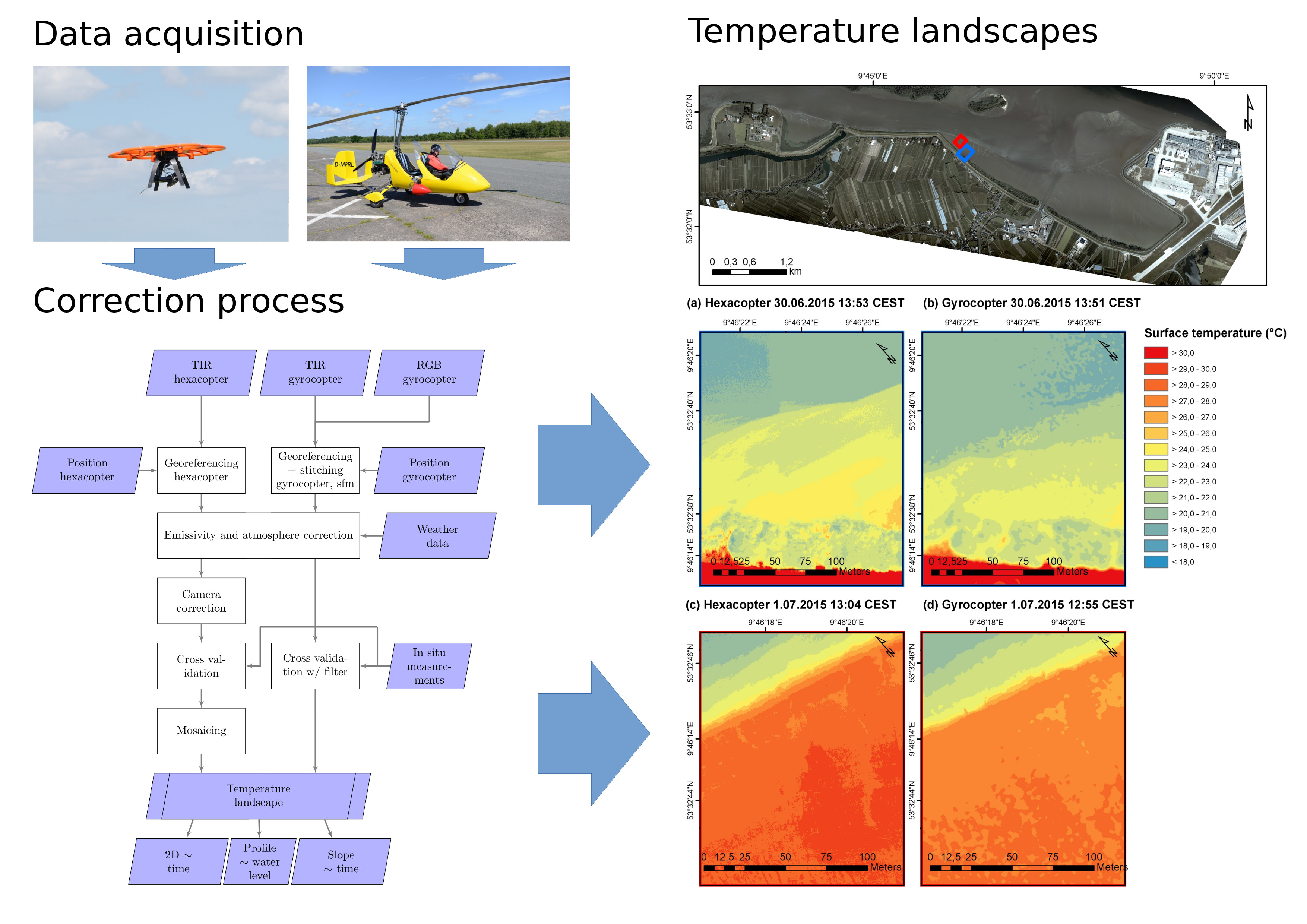
After the data acquisition description follows the analysis of potential error sources on the derived surface temperatures and necessary correction steps. These correction steps include an emissivity correction, atmospheric correction, flat field correction of the UAV camera, and in situ calibration. In the end, examples of the acquired thermal landscapes are presented and discussed.
Research Area
The research area is the Hahnöfer Nebenelbe, a side channel of the Elbe estuary downstream of Hamburg (see
Figure 1). It is a mesotidal estuary [
25], where the tides are responsible for regularly changing water levels, flow, and mixing processes [
26]. The side channel is oriented along the flow direction from east to west, parallel to the main channel. It is separated from the main channel by two narrow islands (downstream Hanskalbsand and upstream Neßsand) in the North and confined by the Altes Land dikes, an area of reclaimed marshland in the South. Furthermore, located in the research area are the smaller island Schweinesand, the former and now reclaimed island Hahnöfer Sand and several shallow intertidal mudflats that are periodically flooded during the tide. The large water body in the east is called Mühlenberger Loch and is defined as a bird sanctuary and protected area, part of the Natura 2000 network.
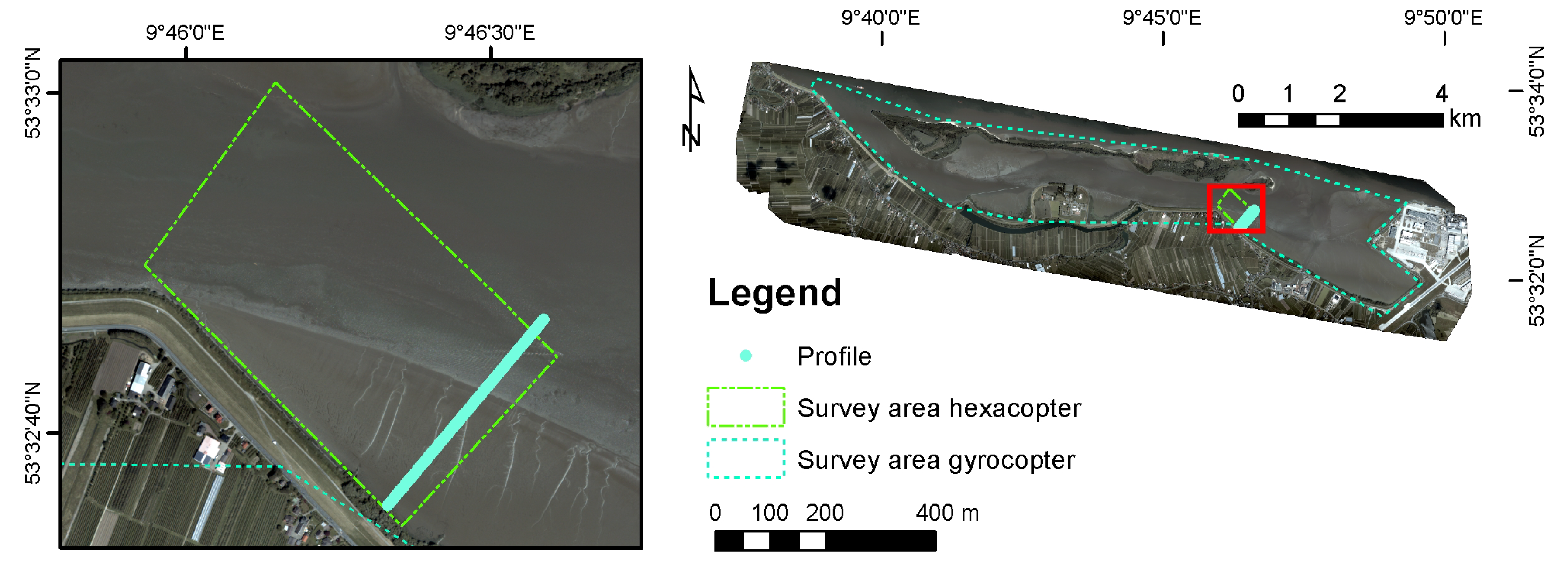
During the diurnal flooding of the Hahnöfer Nebenelbe, the water enters downstream of Hanskalbsand and upstream of Neßsand and the water masses meet South of Neßsand. The water also gradually overflows the tidal mudflats next to the islands and the dike. Due to the mixing point location and the potential survey of a channel and tidal mudflats simultaneously, the survey area of the hexacopter was planned for this part of the side channel (dashed green line in
Figure 1). Additional considerations included a suitable landing place and a view of the flight area unobstructed by trees from the dike. For the gyrocopter, the whole Hahnöfer Nebenelbe and a part of the main Elbe channel were chosen as the survey area (dotted blue line in
Figure 1).
2. Methodology
2.1. Data Acquisition
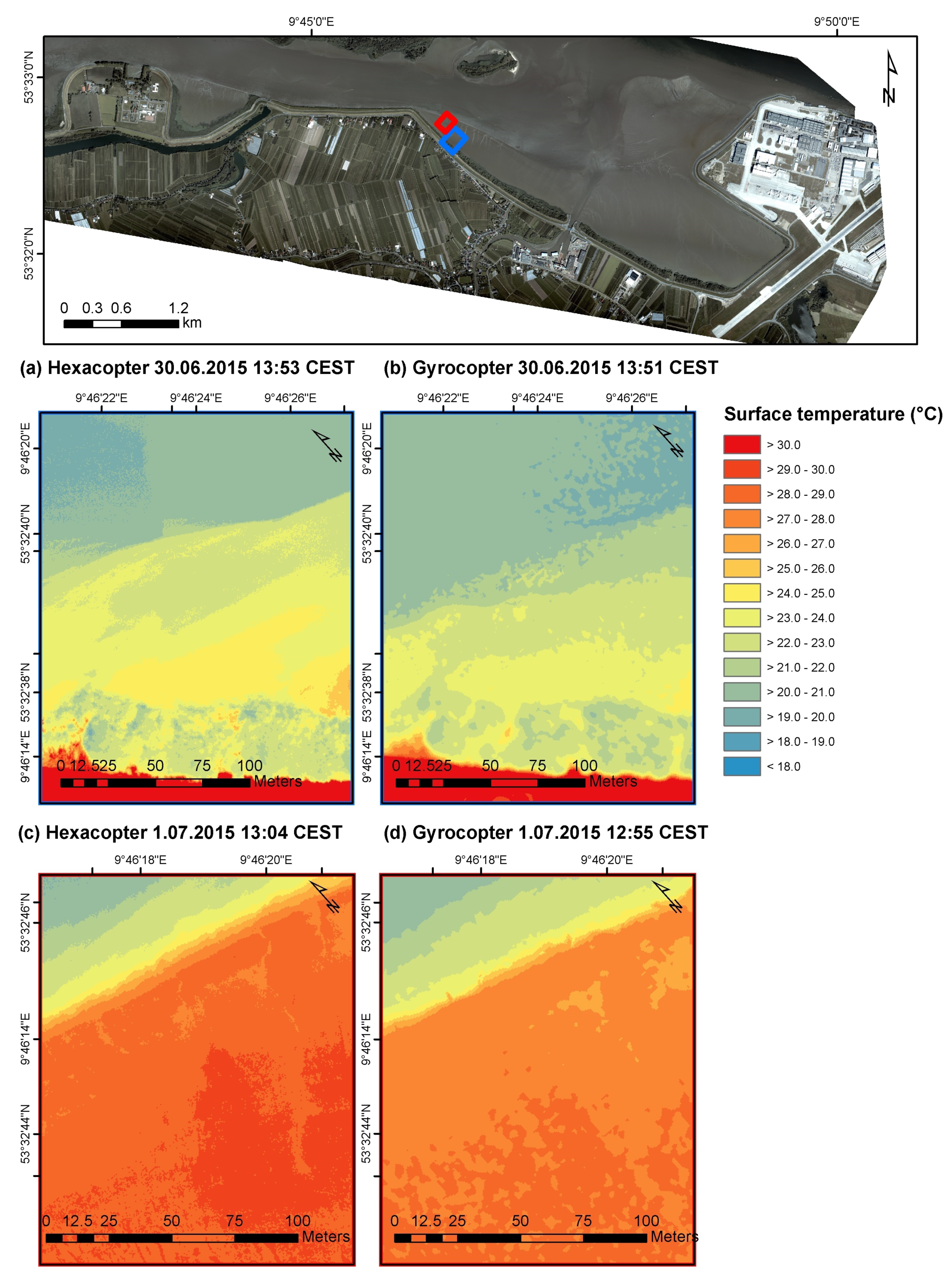
Water surface temperature should be recorded when the temperature contrasts are high to facilitate the identification of temperature patterns and underlying transport processes. This is the case during the summer, when high solar insolation coincides with low tide shortly before noon, the tide then floods the heated intertidal mudflats with colder water from the main stream. When the tide is falling again, the heated water from the mudflats drains into the channels. The aerial survey was conducted on 30th June and 1st July 2015. The flight days were selected based on the predicted water levels and weather conditions. The weather on the two acquisition days was sunny, with few clouds and average wind speeds of 3 ms and 4 ms, respectively.
A combined aerial survey with a piloted gyrocopter and an unmanned hexacopter (6-rotor UAV), as well as in situ measurements, were conducted with the aim to acquire spatially distributed thermal infrared (TIR) data by the Application Center for Multimodal and Airborne Sensors (AMLS), a contracted engineering company, and the Federal Institute of Hydrology (BfG), Germany. The use of gyrocopter and hexacopter permitted only a limited payload and available energy for the imaging systems but allowed to perform multiple flights. The data acquisition included several flights by two aerial systems, seven by the gyrocopter, and 16 by the hexacopter (for specifications see
Table 1). The flights were timed during the tidal phases to catch all essential states of temperature patterns (see
Figure 2). Additionally, in situ measurements of Elbe water quality and temperature, water levels, weather data, and calibration/reference measurements for the TIR cameras with additional water temperature loggers and a TIR thermometer.
2.1.1. Gyrocopter
A gyrocopter, also known as an autogyro, acquired data of the whole Hahnöfer Nebenelbe (24 km
) by overlapping images along four parallel flight paths in a west–east direction. Mounted on the gyrocopter was a Pearleye P-030 LWIR from Allied Vision Technologies, measuring in the 8–14
m wavelength region with a sensitivity of 0.08 K (see
Figure 3).The manufacturer did not publish a specification of the absolute measurement accuracy. The microbolometer sensor is temperature stabilized by a thermoelectric cooler (TEC), i.e., a Peltier element. After Tempelhahn et al. [
27], the constant temperature prevents “the sensor parameters’ offset voltage and responsivity to change according to the ambient temperature”. This reduces temperature variations during the flight and, therefore, the noise in the final images. The camera’s viewing angel is up to 30.5
, and at a flight altitude of 1300 m above ground, the spatial resolution of the TIR images was 1.8 m and the RGB resolution reached 0.6 m. The resulting mean geolocation error of the referenced TIR images was 1.96 m.
Post-processing of the temperature images with the “structure from motion” (SfM) algorithm [
28] was possible due to the dual-camera setup PanTIR built by AMLS: it combines the Pearleye thermal infrared camera with a high-resolution camera in the visible wavelength region [
29]. The high-resolution images are used as a reference for the thermal images and improve the mosaic stitching and geo-referencing, which was previously difficult due to the relatively low water temperature contrast in the thermal images. The geo-referencing was based on the GPS positions of the cameras during acquisition, with additional manual referencing based on ground control points. The duration of the acquisition flights, the distance to the airfield used, and the proximity to two other airports, Hamburg Airport, and Hamburg Finkenwerder Airport, allowed for four planned flights per day. Due to flight restrictions, one flight had to be canceled on the second day.
2.1.2. Hexacopter
Additionally to the gyrocopter survey, a hexacopter (6-rotor UAV) acquired multispectral and thermal data (see
Figure 3). Due to flight altitude and range of the hexacopter, it covered a far smaller survey area at a higher spatial and temporal resolution than the gyrocopter (0.25 km
). A section of intertidal mudflats and a fairway in front of the dike south of the Hahnöfer Nebenelbe was chosen for a detailed survey, where the temperature differences are especially pronounced during the tidal cycle. Only one continuous measurement station was located inside the survey area, but the area boundaries could not be modified due to the necessary accessibility and line of sight. The hexacopter pilot operated the UAV based on a dike at the southern river bank. The flight altitude was limited to 100 m due to the bird sanctuary next to the survey area.
To cover the hexacopter survey area, it took approximately one hour, eight flight lines, and battery changes every two flight lines. The image acquisition frequency was increased on the second day to allow for the selection and dismissal of images taken with an extreme camera tilt due to wind gusts. The thermal camera on the hexacopter was an Optris PI450 (uncooled microbolometer) that acquired observed surface temperatures in the wavelength region of 7.5–13 m with a sensitivity of 0.08 K, an accuracy of C/, and a pixel resolution of 382 × 288 pixels. The viewing angle of the camera is up to 26.5. The hexacopter was able to cover the survey area eight times per day on both days. The hexacopter images were then referenced individually based on the system’s differential global positioning system (DGPS) measurements and position of the camera gimbal. The resulting mean geolocation error of the referenced TIR images was 3.31 m.
2.1.3. In Situ Measurements
Besides the thermal images acquired by gyrocopter and hexacopter, several other data sets were used to evaluate and correct the aerial data sets. Weather data was collected from the meteorological weather station Fuhlsbüttel, Hamburg, operated by the German Meteorological Office (Deutscher Wetterdienst, DWD) and provided online at the Climate Data Center [
30]. Several weather parameters were also collected onboard the gyrocopter, operated by AMLS. The water levels, necessary to determine the tidal cycle in the research area, were measured at several water gauge stations, operated by the Federal Waterway Administration (Wasser- und Schifffahrtsverwaltung, WSV).
In situ measurements of the water body temperature, from three continuous multi-parameter buoy measurements were provided by the BfG. Additionally, four temperature data loggers (Driesen + Kern underwater temperature data logger) were deployed by BfG and WSV in summer 2015 and attached to lateral marks near the hexacopter survey area. The number of measurement locations is small due to the limited accessibility of the mudflats and dense vegetation areas at the shore. While the measurements were used to evaluate the aerial data directly, calibration tests were setup for both the gyrocopter and hexacopter TIR camera: before each flight, the TIR cameras captured the image of a water tub in which a temperature data logger was immersed. At the hexacopter launch site, a thermal infrared thermometer (IR120 by Campbell Scientific) was added to the setup. The absolute accuracy of in situ measurements of the water body temperature was between 0.15 and 0.2 C.
2.2. Sources of Error and Uncertainty
When evaluating water surface temperatures measured by airborne thermal sensors, there are several sources for error and uncertainty to consider. The error described the difference between the idealized “true value” and the measured value, which is unknowable, while the uncertainty is characterized by the variation of the values that are in all probability describing the measured variable [
31]. These include the accuracy and precision of the sensor [
32,
33,
34], sensor noise, and vignetting due to characteristics of the sensor and viewing geometry [
35,
36]. The thermal cameras used in this survey have not the radiometric and focal plane array calibration and stability that cryogenically cooled cameras offer [
12] and require additional calibration steps and processes (e.g., [
32,
33,
34]). Furthermore, the temperature signal travels through the atmosphere between the sensor and observed surface and is affected by the transmissivity, up and down welling radiance [
11,
12,
35]. At the water surface, we have to consider that the TIR sensor cannot observe the actual top water surface, but the radiance emitted from the “radiometric skin depth” [
37], which is the top 50–100
m [
38]. The observed surface temperature is depending on the emissivity/reflectivity [
12,
35,
36,
39,
40] as well as on thermal boundary layer effects and possibly stratification below the water surface [
11,
12,
41,
42,
43,
44,
45]. Environmental effects may also include scattering from the near-bank environment and the adjacency effect [
11,
36]. Shadows have been cited by other authors to influence the radiant temperature of the water surface [
11,
12], but were not visible in the acquired thermal imagery. With regards to methodology, mixed pixels, the spatial uncertainty of comparison pixels, and the temporal variability of in situ measurements (sampling uncertainty) come into play during the evaluation and assessment of the results [
12,
38].
Random observational errors tend to cancel out when large numbers are averaged together due to the independence of the individual errors, but systematic observational errors have to be analysed and examined closely [
31]. In the next subsections, these uncertainties and error sources are discussed based on the results from other authors and our assessment of their relevance in this survey, before correction steps are proposed.
2.3. Evaluation of the Datasets and Validation of the Correction Steps
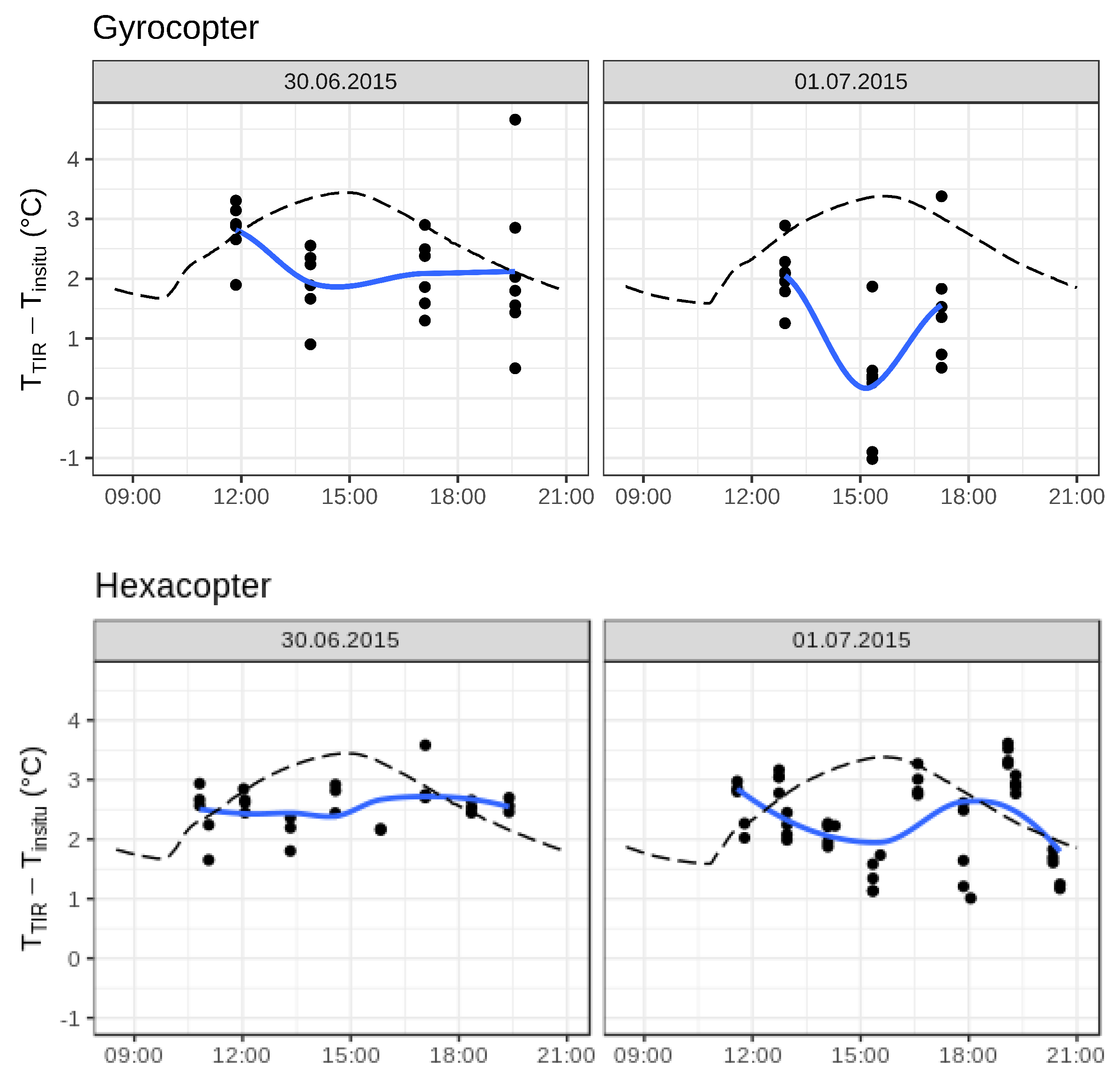
To evaluate the acquired data sets and to validate subsequent processing and correction steps, the temperature value from the individual hexacopter images and large gyrocopter mosaics was extracted automatically at the known coordinates of measurement locations and compared to in situ measurements of the water temperature as a reference. Eight measurement stations were located in the gyrocopter survey area and, due to its smaller size, one in the hexacopter survey area. The extracted differences were then grouped by flights (see
Figure 4).
The automated extraction of single-pixel values can also lead to the extraction of pixels that are not necessarily representative of the water temperature at the measurement location due to mixed pixels of water and actual non-water objects, water temperature boundaries or georeferencing error [
12,
38]. For the hexacopter TIR dataset, different extraction methods were tested: (i) the extraction and averaging of a 3 × 3 pixel window instead of a single-pixel and (ii) the manual extraction of a water pixel closest to the visible measurement location instead of the automatic extraction at the provided geographic coordinates. The resulting change of
was (i) −0.06 ± 0.32
C and (ii) 0.01 ± 0.22
C. The different methods had a larger effect on the variability of the extracted temperatures and less on the mean value. The evaluation of the datasets was consequently based on the automated extraction of single pixels, as the test methods required significantly more computing time or manual labour without a significant effect on the evaluation results. However, special attention was given to the possible occurence of outliers.
2.4. Emissivity Correction
For the emissivity of water, a constant value is often assumed in a range between 0.96 and 0.99, as it changes very little compared to emissivities of land cover surfaces. However, the emissivity of water depends on the composition of the water (e.g., sea vs. fresh water, sediment amount, dissolved minerals) [
36,
40], wavelength, observation angle, and surface roughness [
36]. Small observation angles up to 30
lead to a small decrease in emissivity and temperature, in most cases negligible [
36], but only 1% uncertainty of the emissivity may lead to a 0.4 K error on the surface temperature retrieval under standard conditions [
35]. As the individual hexacopter images featured strong vignetting with decreasing temperature values towards the edges, this potential error source was investigated.
Masuda et al. [
46] developed an emissivity model applying the Fresnel relationship between incident radiant power and the reflected and refracted power at the boundary between different dielectric media. It suitably represents the actual emissivity values for viewing angles up to 40
(see also [
39]), and it has been widely used [
47,
48]. The emissivity values are calculated based on optical constants, viewing angles, and local wind speeds (for modelled emissivity values during the survey, see
Figure 5). In this study, the observation angle was used as incidence angle as no large waves were observed during the data acquisition, and the water surface was assumed to be level.
Other phenomenons that influence the emissivity are foam (from either natural or anthropogenic origin, lower emissivity and observed surface temperatures) and anomalies due to boat plumes that change the water surface roughness [
12]. Simultaneously acquired RGB images can help identify these effects. As they occurred only occasionally in very small areas in the acquired images and did not affect the
at the locations of the in situ measurements, they were not corrected.
2.5. Atmospheric Correction
The temperature signal of the observed surface travels through the atmosphere before it is received by the sensor and is affected by several factors: the transmissivity, up and downwards radiance [
11,
35,
49]. The influence of the atmosphere ist mainly depending on the water content of the atmosphere, which is notoriously difficult to assess and for standard atmospheric water vapour content an error for
of 0.7 K is to be expected [
35]. Thermal scattering from the near-bank environment was also considered, but is only relevant under low observation angles [
38] and was expected to be small compared to
.
The measured
were converted to radiance
with Planck’s radiation law and corrected in a single-band-approach [
35,
50,
51] based on the constant or calculated emissivity
(see
Section 2.4) and atmospheric parameters upwelling radiance
, downwelling radiance
, and transmissivity
calculated with the radiative transfer model MODTRAN5.3.2. [
52].
MODTRAN5.3.2. requires input parameters such as aerosol type, atmosphere type or profile, weather data, sensor information, ground elevation and sensor altitude. The influence of the input parameters on the influence of the atmospheric correction was evaluated by a sensitivity test that was conducted for the
mosaic from the first gyrocopter flight with different MODTRAN input parameter sets and compared with
measurements from in situ measurement locations (see Fricke et al. [
53] for more detailed results). As it turned out, only a small effect on the corrected surface temperatures had the inclusion of different weather station data (
C), the chosen aerosol type (
C), and the integrated calculation of the transmissivity (
C). The effect of changes in altitude was
C/100 m. On the other hand, the selection of the model atmosphere had a more significant effect of up to 0.5
C, and changes in the sensor bandwidth have a substantial effect of several degrees Celsius. The transmissivity of the atmosphere decreases rapidly below 8
m and above 14
m and therefore, an incorrectly chosen, too large bandwidth can cause an overestimation of the corrected
(see also [
54]). Based on the sensitivity test, the following input parameters were decided for the radiative transfer model: the local climate station data, the U.S. standard atmospheric profile adapted to the weather information by the gyrocopter at flight altitude, a maritime aerosol type, and the flight altitude above ground as recorded by the gyrocopter and hexacopter. The transmissivity was integrated over the wavelength, and the bandwidth was the full width at half maximum from the manufacturer specification as suggested by Barsi et al. [
54], which was for both cameras close to 8–13
m.
It was also considered to calculate the atmospheric parameters depending on the viewing angle, mainly the transmissivity [
35]. In this case, it changed the results only marginally (<0.1
C, [
53]) but required disproportionally high computing time, and therefore was omitted for this correction step. In contrast, the inclusion of the angle and wind dependent emissivity was easily executed and therefore incorporated in the atmospheric correction (see Equation (
1)).
2.6. Camera Flat Field Correction
A vignette effect and decreasing temperatures towards the image borders were observed in the individual images from both hexacopter and gyrocopter. Possible causes include a sensor error, the lens geometry, and angle-dependent emissivity and atmospheric effects. Nugent et al. [
33] state that microbolometer detectors without “a thermoelectric cooler to stabilize the focal plane array temperature, the calibration must be updated nearly continuously”.
The gyrocopter camera has a calibration process that uses a shutter to reduce the vignetting and the variability across the individual TIR images. Laboratory measurements have shown that when viewing a black body with a uniform temperature, the shutter calibration can reduce the standard deviation across the thermal image from 1.4 C to 0.1 C. Together with the high overlap of the individual images acquired by the gyrocopter, the individual images could be aligned, and the mosaics could be created without necessarily correcting the remaining vignetting.
The overlap of the individual images acquired by the hexacopter proved to be insufficient compared to the stronger temperature gradient towards the image border. Therefore, the vignette was also visible in the mosaics. A laboratory flat field calibration as described by [
32] was substituted with an image-based flat field correction during post-processing. This camera correction is based on a per-pixel correction value look-up table (LUT), which is determined by the offset of each pixel compared to the value of the center pixel in the acquired images. Image based LUTs are more accurate and more straightforward to calculate for images acquired in the visible wavelength range compared to optical modeling approaches [
55]. The usage of a large number of calibration images also averages out the random noise component in the data [
55].
For this case, images with a standard deviation of temperature values lower than 0.25
C were selected as calibration images, as they were assumed to represent a water surface with a nearly uniform temperature where the deviations stem mainly from sensor noise. The correction value
for every pixel
i was calculated as the mean temperature difference in all selected calibration images between the image’s center pixel
and the selected pixel
. The calibration value
was then subtracted from the original pixel value
to calculate the corrected pixel value
.
Additionally to the precision and relative accuracy of measurements across the camera sensor, the accuracy of a sensor and stability of the absolute calibration is essential [
35,
36]. Especially uncooled TIR sensors tend to be affected by the ambient air temperature and, therefore, show a low absolute accuracy when used in the field [
32,
33,
34]. These issues are discussed in
Section 2.8. Furthermore, the sensor response function was not known for both cameras. The sensor response function describing the bandpass and FWHM effects of the sensor may alter the results when not considered and can lead to a 0.15 K difference for a surface temperature of 300 K in the TIR wavelength region [
35]. Lens distortions may also affect the TIR images, but a correction was not applied as the expected improvement is relatively small [
55,
56].
2.7. Temperature Stratification and Skin Effect
Another source of error for the remote sensing of water temperatures is the possible difference between the water surface and water layers below, from skin to subskin and water body temperature [
11,
18,
39,
44]. Different processes can lead to a non-linear vertical temperature gradient: evaporation and heat exchange produce a cooler surface and skin water temperature (“skin effect”), while diurnal heating due to solar radiance would warm the skin and subskin water more than the water body layer and lead to thermal stratification below the surface. For an indepth description of the mechanisms, refer to [
43].
TIR sensors measure the radiation from only the upper submillimeter-thick skin of the water body [
39,
41], where the skin layer is almost always present [
57,
58]. Based on the model developed for the skin effect in SST measurements at nighttime and daytime during strong wind conditions [
44] and the average wind speed of 3 and 4 ms
for the survey days, the difference between skin and the bulk temperature was expected to be about −0.2
C. This is similar in magnitude to the skin effect for lake surface temperatures (LST) in a moderate climate, which was 0.1–0.2 K for 3 to 4 ms
wind speed in [
59] and 0.11–0.46
C in [
42], depending on the daytime/nighttime and mixing due to wind, with a higher standard deviation of the daytime skin effect due to variable stratification. The skin temperature is also strongly correlated to the air temperature [
60]. Shade from the bank vegetation covered only a very small part of the images and had no visible effect on the TIR temperatures [
38].
If there is no thermal stratification, e.g., due to wind turbulence, sub-skin water surface temperatures can be close to in situ measurements of the bulk water temperature [
37]. However, under clear and calm conditions and subsequently strong insolation, a warm layer can develop below the surface (sub-skin) compared to the cooler bulk water temperature and form a thermocline [
41]. These temperature variations within the top water layers can lead to significant errors in remotely sensed water temperatures compared to in situ measurements.
2.8. In Situ Calibration and Validation
Generally, an absolute temperature calibration of TIR sensors can be achieved by periodically viewing one or more external blackbody sources, either in a laboratory calibration before flight, or cooled black body calibration in flight. Cost-effective and lightweight thermal cameras or sensors typically forgo cryogenically cooled black body calibration in flight due to weight and space constraints. This can pose a significant problem for absolute measurements as the sensor responds to changing ambient temperatures. It is recommended for uncooled bolometers to let the camera acclimate to the ambient temperature first [
12], even for several minutes [
34].
Reference measurements at ground level with the gyrocopter TIR camera were not usable for calibration as the flight altitude of 1300 m lead to a decrease in ambient air temperature of about −16 C compared to the ambient ground temperature. Laboratory measurements with the gyrocopter camera simulating the ambient conditions during the survey flights showed a 5.7 ± 0.15 C temperature difference due to changing sensor performance with changing ambient and camera temperature. Laboratory measurements with the sensor carried by the hexacopter were not feasible, so the only opportunity to calibrate the radiometric temperature measured by the TIR sensors would be based on the in situ measurements. This means that the resulting calibrated datasets would represent the kinetic water body temperatures.
A nearly linear relationship between
and
measured by temperature loggers has been reported [
38]. It has been the traditional approach for calculating SST based on the regression between satellite radiances against ship data/buoy measurements to produce SST consistent with the traditional bulk SST observations [
57,
61,
62]. The calibration should be conducted after atmospheric correction, as the relationship between water surface temperature to brightness temperatures and atmospheric state is supposedly non-linear [
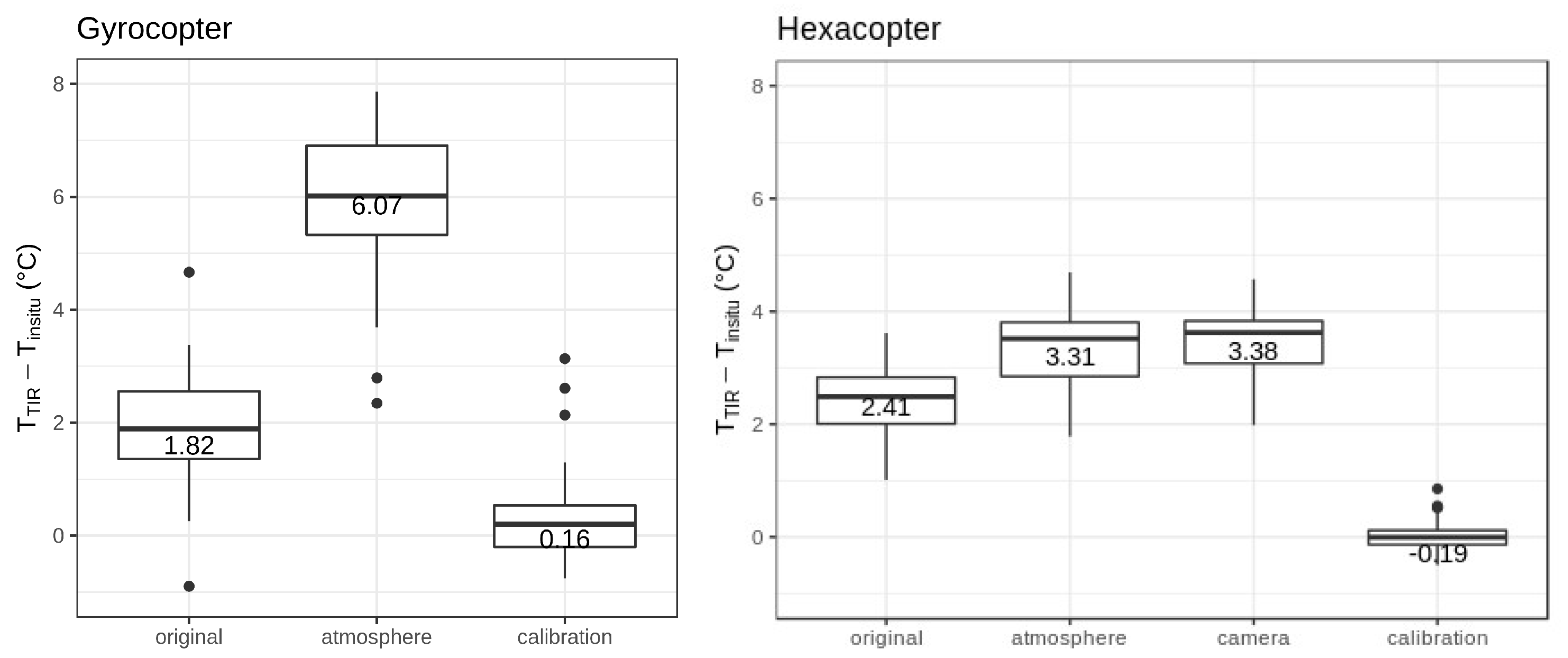
62] and should be corrected first. Assuming that the previous corrections reduced or eliminated the variable effects on individual images or parts of the mosaic, an in situ calibration method for the whole flight mosaics was developed (see also [
18]).
To fully utilize the number of in situ measurements available, cross-validation with the leave-one-out method was chosen for the simultaneous calibration and validation of the mosaics. Given
n data pairs in the data set, this method uses
pairs as a training set to fit a model explaining the relationship between the data points, and the remaining pair is then used as a test set to evaluate the fit of the model and to perform the validation. This procedure is repeated until all data pairs have been used as a test set, and the mean error can be calculated for the chosen model. Several models and data set sizes were tested on the available data pairs, but in the end, linear regression with a slope equal to one, i.e., a simple bias correction, was chosen to correct each flight (mosaic) separately.
Due to the high variability of the difference
between
and
and occurrence of outliers, models based on polynomial equations of a higher degree tended to overfit and suggested improbable relationships between
and
. Similarly, the slope was fixed at one to reduce the effect outliers could have on the individual linear models which were repeatedly calculated on a small number of data pairs for each flight and produced implausible high positive and negative slope values. Models fitted to data pairs from individual flights produced better results than models fitted to all data pairs or only from one day as average
was varying throughout the survey days (see
Figure 4). Additionally, in the gyrocopter datasets
values outside the interval of
with the quantile
= 1.645 (90% tolerance interval) were omitted as outliers as
showed a higher variance, to prevent the fitting of statistically sound, but implausible models. This step was omitted for the hexacopter cross-calibration as there were not enough data pairs available for each flight.
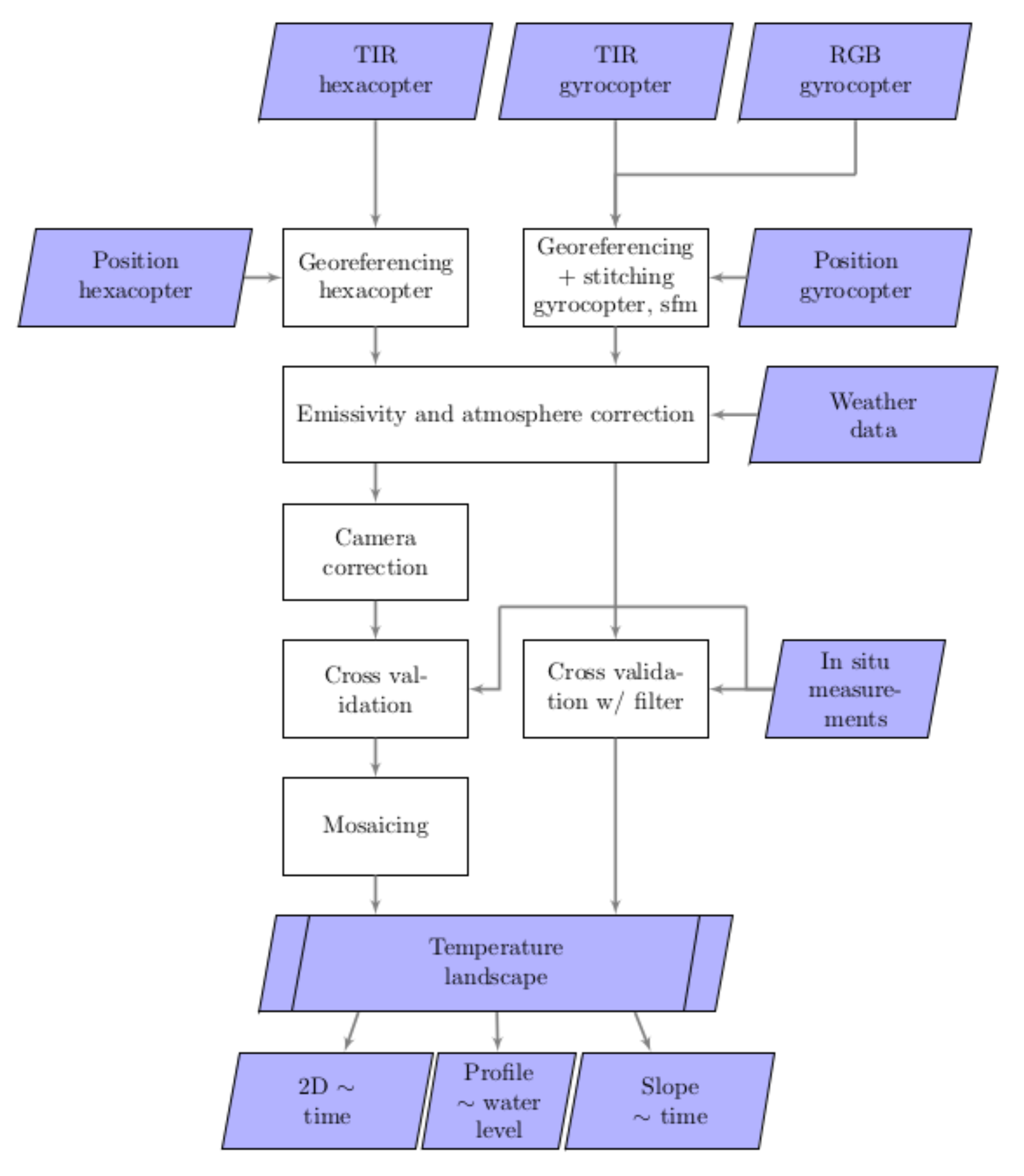
2.9. Processing and Workflow
A schematic overview of the correction steps can be found in
Figure 6. The Python programming language was used (Python Software Foundation,
https://www.python.org/ (accessed on 6 April 2021)) for calculating the individual correction steps. From there on, mosaics based on the individual hexacopter images were created with the Erdas Imagine 2015 Mosaic Pro Tool (Hexagon Geospatial,
https://www.hexagongeospatial.com/products/power-portfolio/erdas-imagine (accessed on 6 April 2021)). The seamlines were based on the distance to nadir to increase the mosaicking process’s reproducibility and comparability, and calculated with feathering over 5 m at the seamlines.
As it was not necessary to correct angle-dependent effects on the gyrocopter data due to the larger overlap, the detailed emissivity calculation and correction was only applied to the hexacopter images.
5. Conclusions and Future Research
We conclude that low-cost thermal imagers and platforms can be used to acquire the temperature data necessary to monitor the thermal landscape of the Hahnöfer Nebenelbe and validate the water quality model. One of the best ways to improve data acquisition in the future is related to the calibration of the sensors to improve the radiometric consistency throughout the data collection [
36] instead on in situ calibration relying on available in situ measurement of the water temperature. More research has to go into the selected sensor’s behaviour depending on ambient temperature to reduce the variability between individual TIR images and flights [
56] and a post-flight data-processing technique to remove the non-uniformity of the detector [
18]. If a thorough laboratory calibration and description of the behaviour of the thermal sensor is not possible, adequate reference or in situ measurements during the survey have to be carried out. Water temperature differences have to be in the dimension of the accuracy of the data sets to identify temperature changes on a spatial and temporal scale reliably. The authors conclude that the amount of in situ measurement stations was adequate for the analysis and correction in this study, but should preferably be expanded for future surveys. Higher acquisition rates during crucial tide phases are advisable, but have to be determined with a pre-study as they depend very much on the actual location of the survey area.
Another large unknown factor in this survey was the “skin effect” that had been observed in reference measurements on-shore at the same time as the flight survey (see [
53]). It could not be thoroughly quantified as the calibration parameters of the TIR sensors were unknown and for the calculation of water bulk temperatures not necessary. For information about the water surface temperature, more measurements and more rigorous quantification of both the sensor calibration and the “skin effect” would be necessary [
18].


 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}