
Seamless 3D Image Mapping and Mosaicing of Valles Marineris on Mars Using Orbital HRSC Stereo and Panchromatic Images




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Datasets
1.2. Previous Work
2. Materials and Methods
2.1. Data Preparation
2.2. The ASP and CASP-GO Auto-DTM Generation System
2.3. The Hybrid Stereo Processing Chain
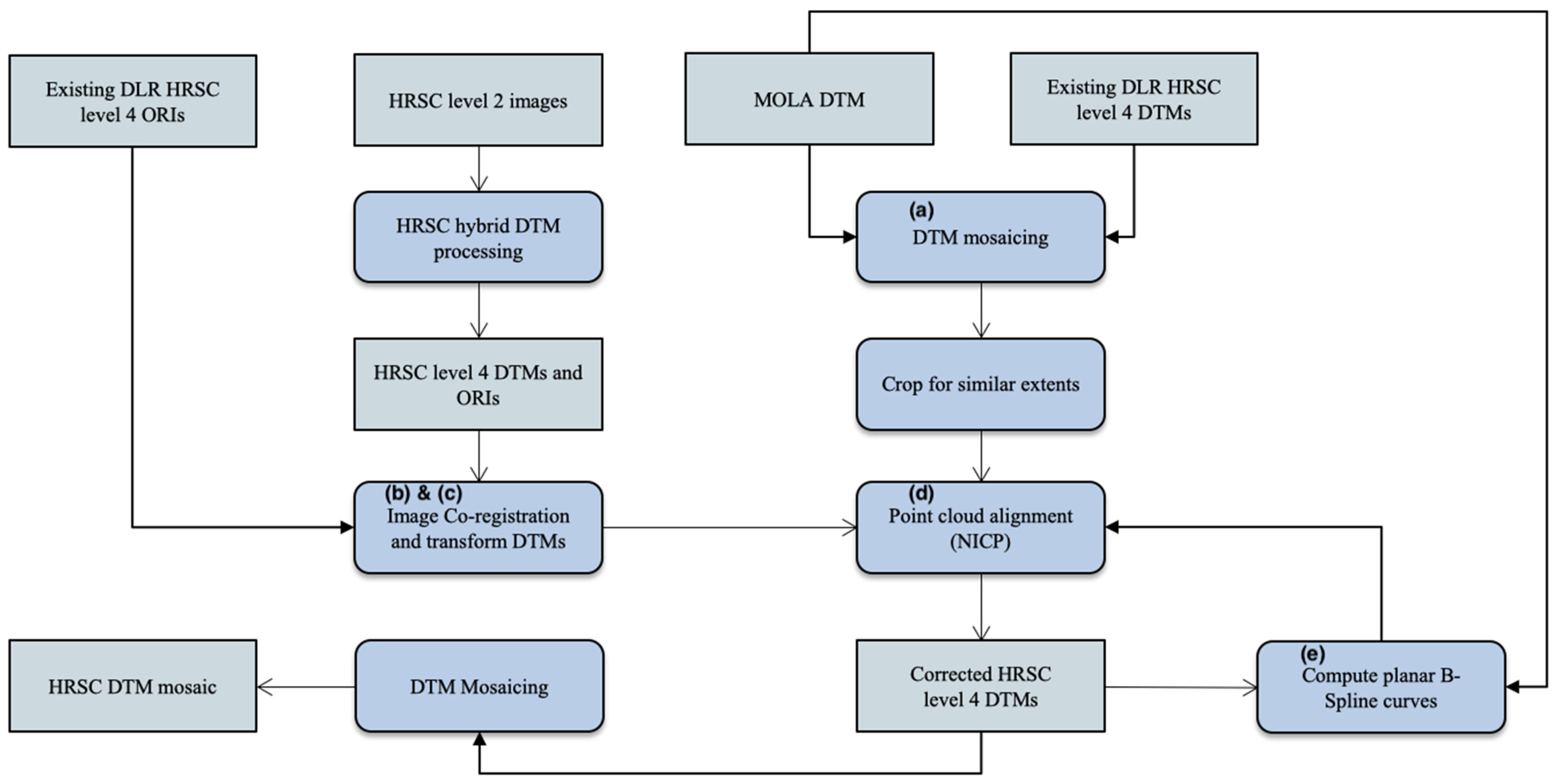
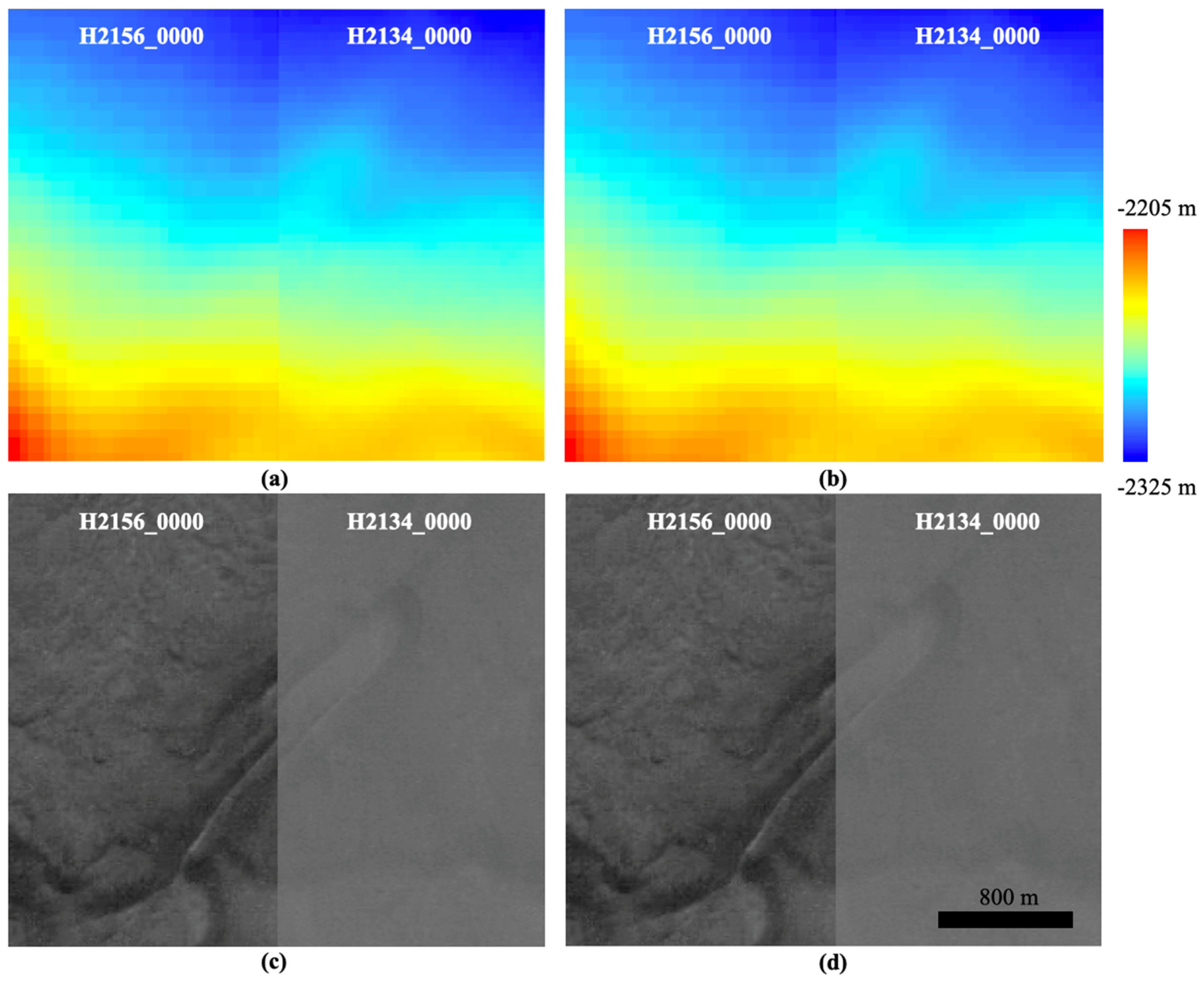
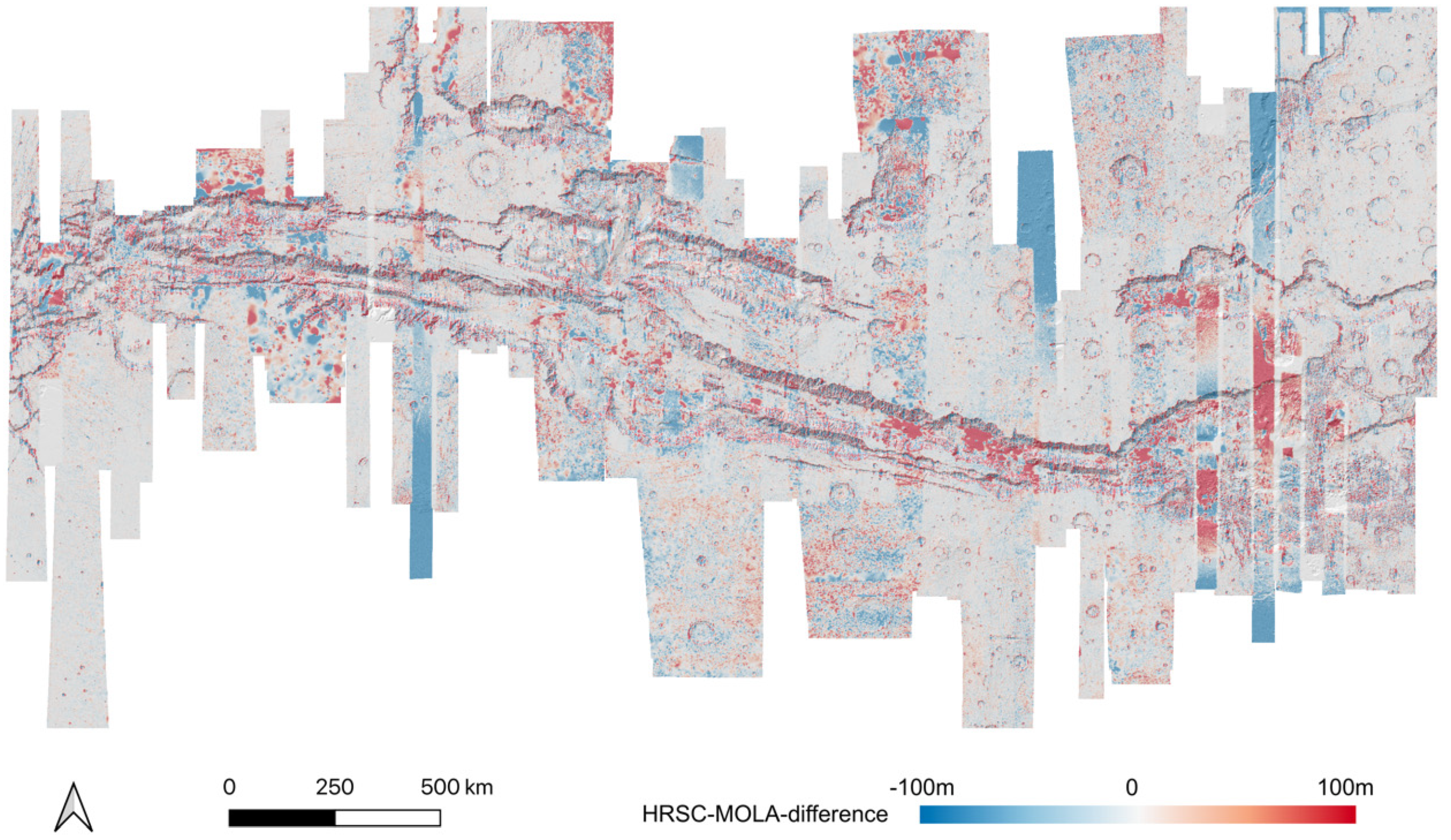
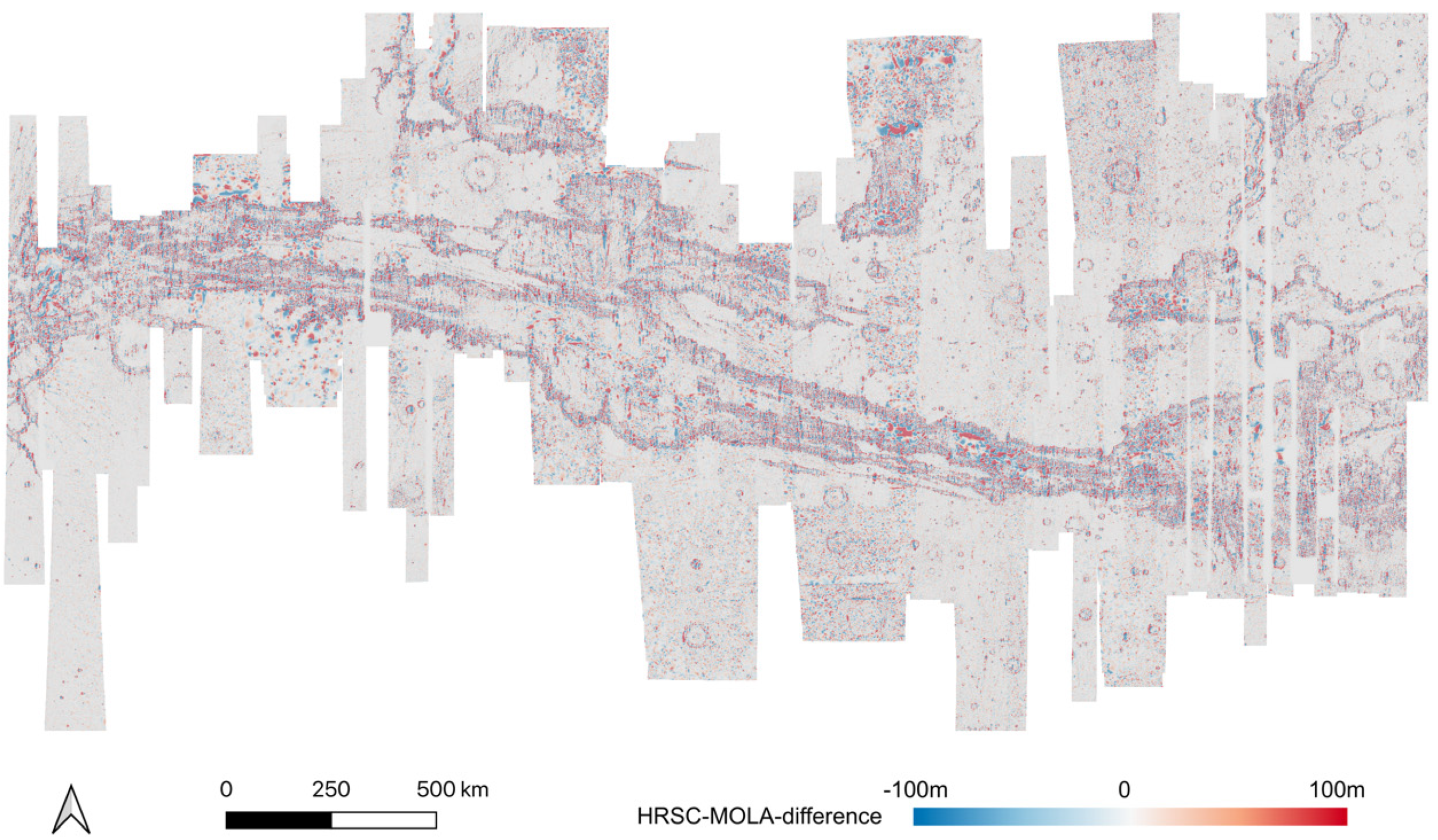
2.4. DTM Height Correction and Mosaicing
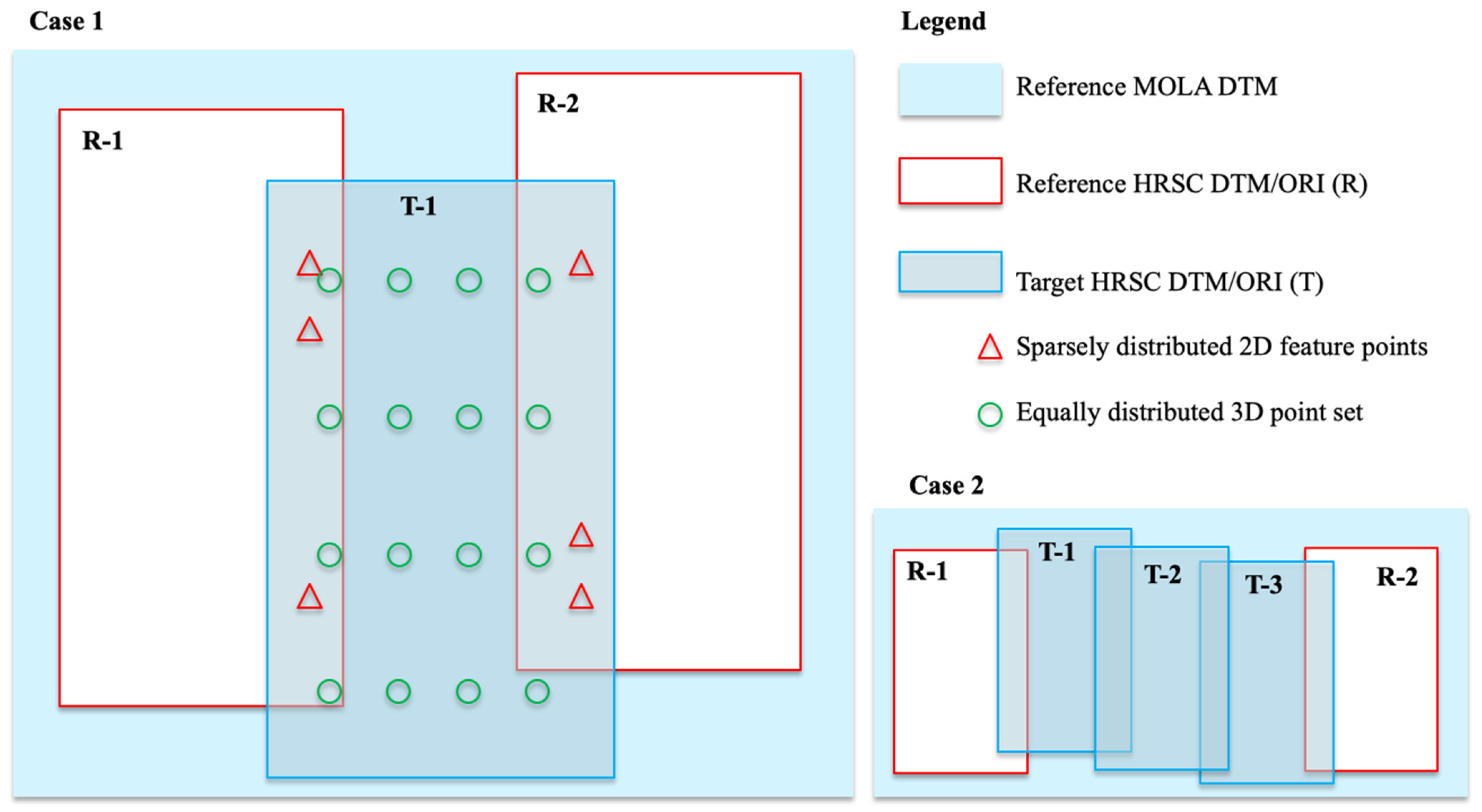
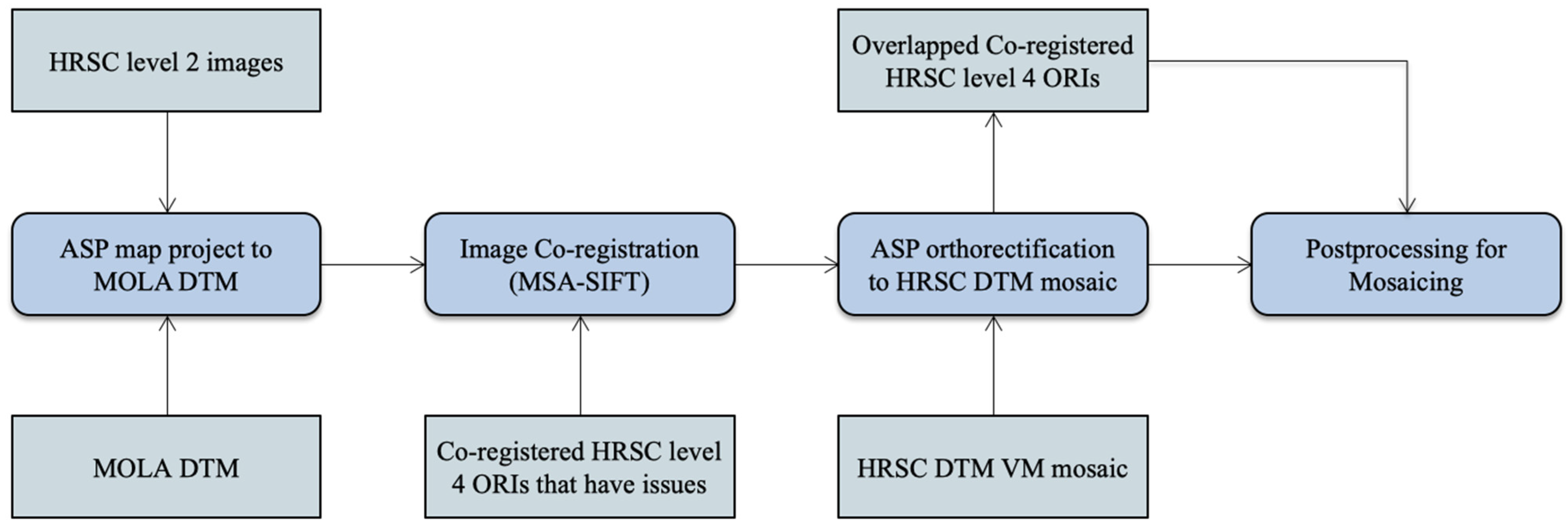
2.5. Automated Co-Registration and Orthorectification
2.6. Brightness Correction and Mosaicing of ORIs
- (1)
- Lambert correction. The main effect of this step is to compensate the variation of illumination across an image caused by the curvature of the planet.
- (2)
- Generate intermediate resolution brightness reference map. Images are divided coarsely into cells (3 cells across track; a proportional number along-track according to the image). The image is rescaled in brightness value to match the TES map with a continuous interpolation between cells. A mosaic is created at moderate resolution (400 m/pixel) with same average brightness characteristics as the TES map. Edge artefacts are diminished using uniform Gaussian blur. The resulting mosaic has about 3 km/pixel information content, but with very much reduced artefacts compared to the TES source, where the information content is substantially lower than the nominal resolution.
- (3)
- Generate full-resolution mosaic. The source images are brightness-referenced to the intermediate mosaic similarly to step (2), but this time using a smaller cell size (9 × n). Overlapping images are feathered together over a 40-pixel range.
- (4)
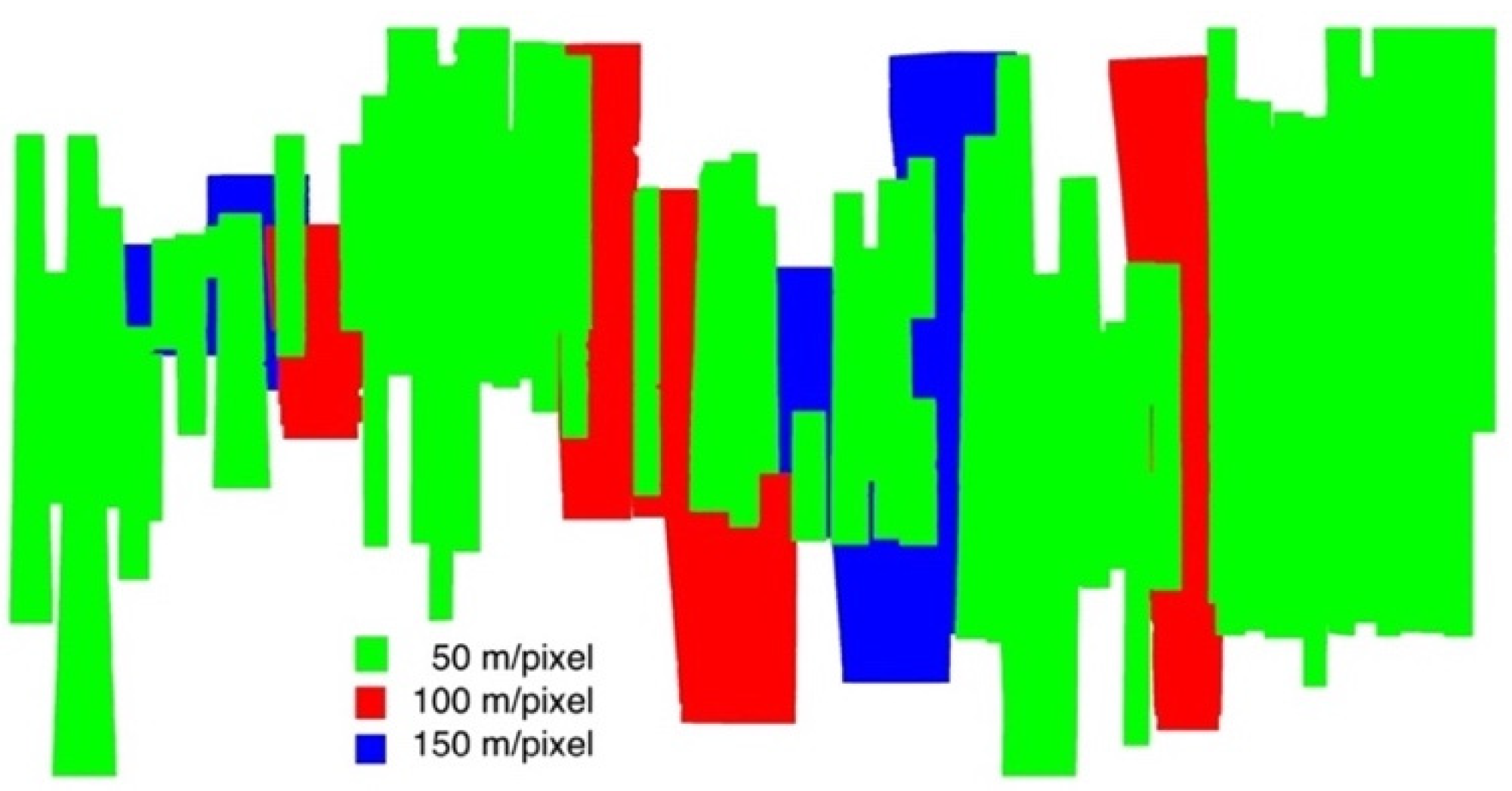
- Image sequence. The overlapping sequence for the mosaic is optimised through visual inspection. The starting sequence places the shortest ground sampling distance at the top of the mosaic. Lower quality images are moved down in the sequence by estimating a longer effective ground sampling distance by comparison with neighbouring images.
- (5)
- Contrast adjustment. Images with higher atmospheric scattering appear in the mosaic as areas of low contrast. The contrast is increased either uniformly or with a multi-point interpolated along-track change.
- (6)
- Iteration. The mosaic is regenerated and steps (4) and (5) reconsidered until the result is as close to visually homogeneous as possible.
3. Results
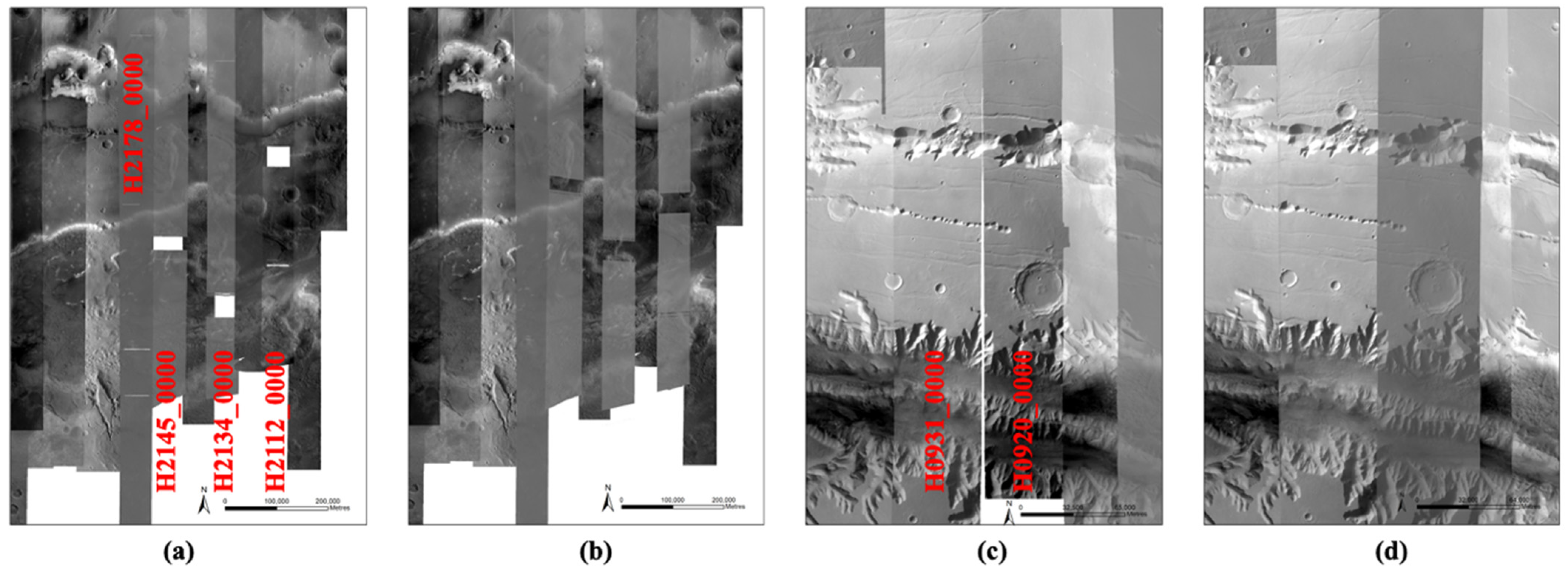
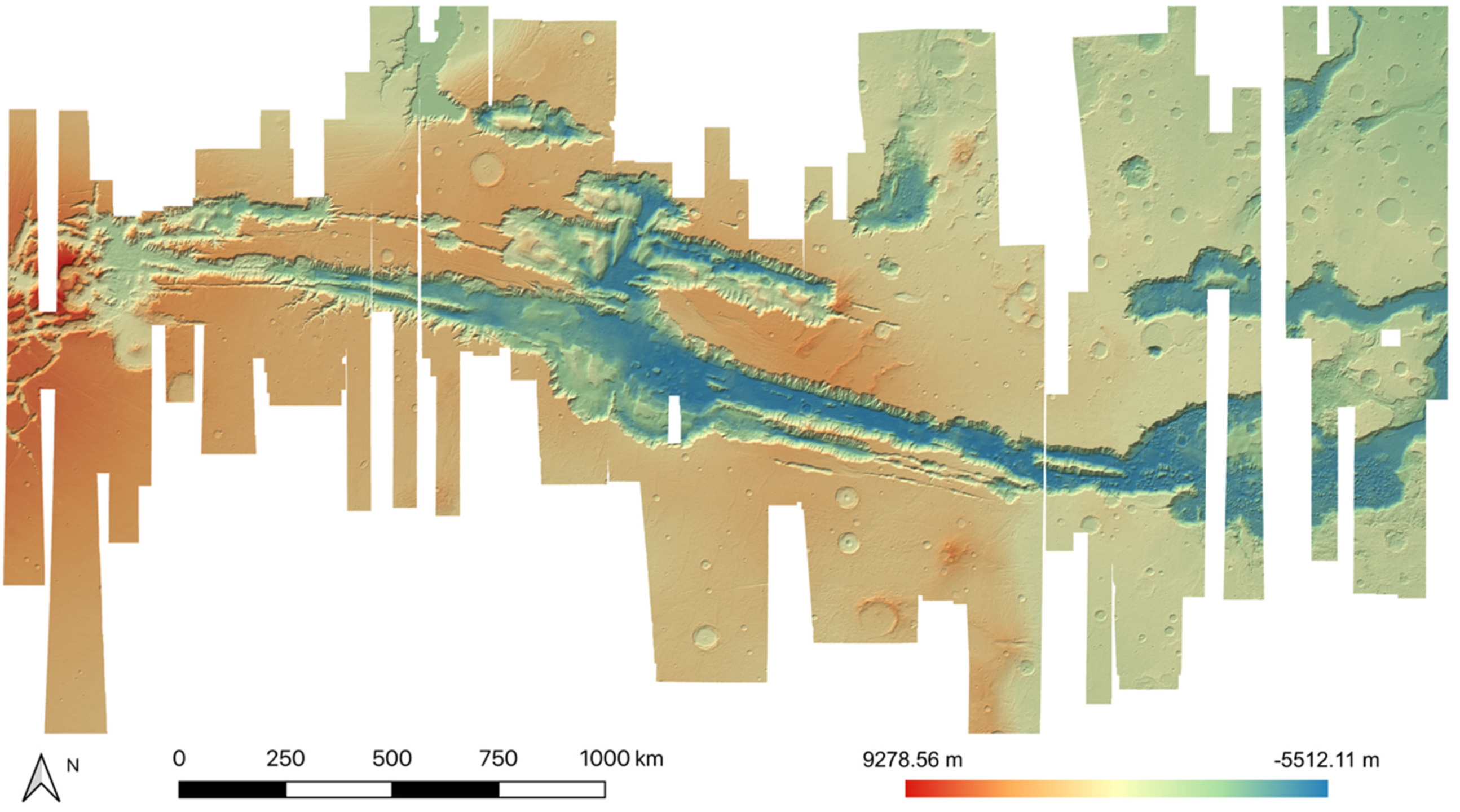
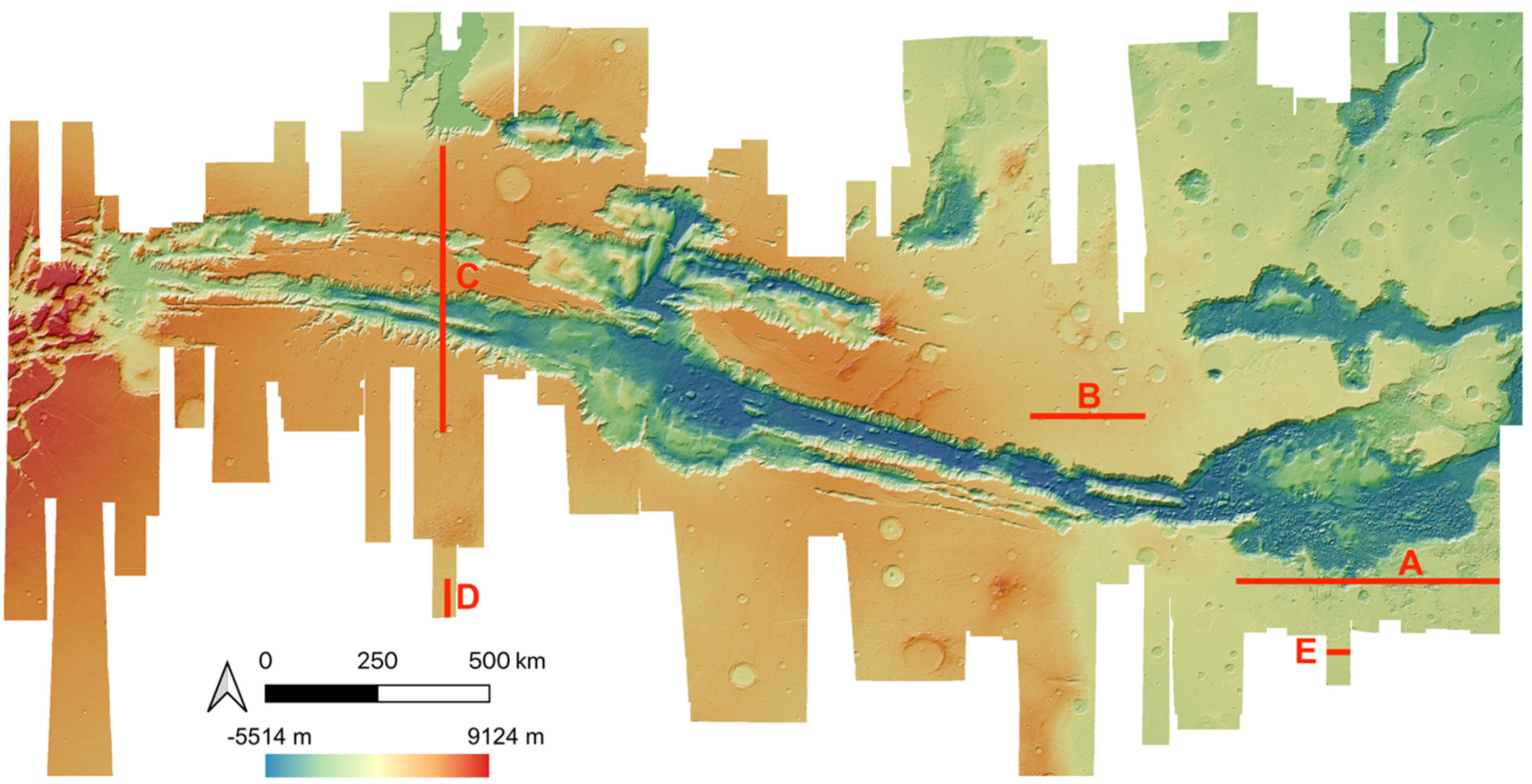
3.1. HRSC DTM Mosaic for Valles Marineris
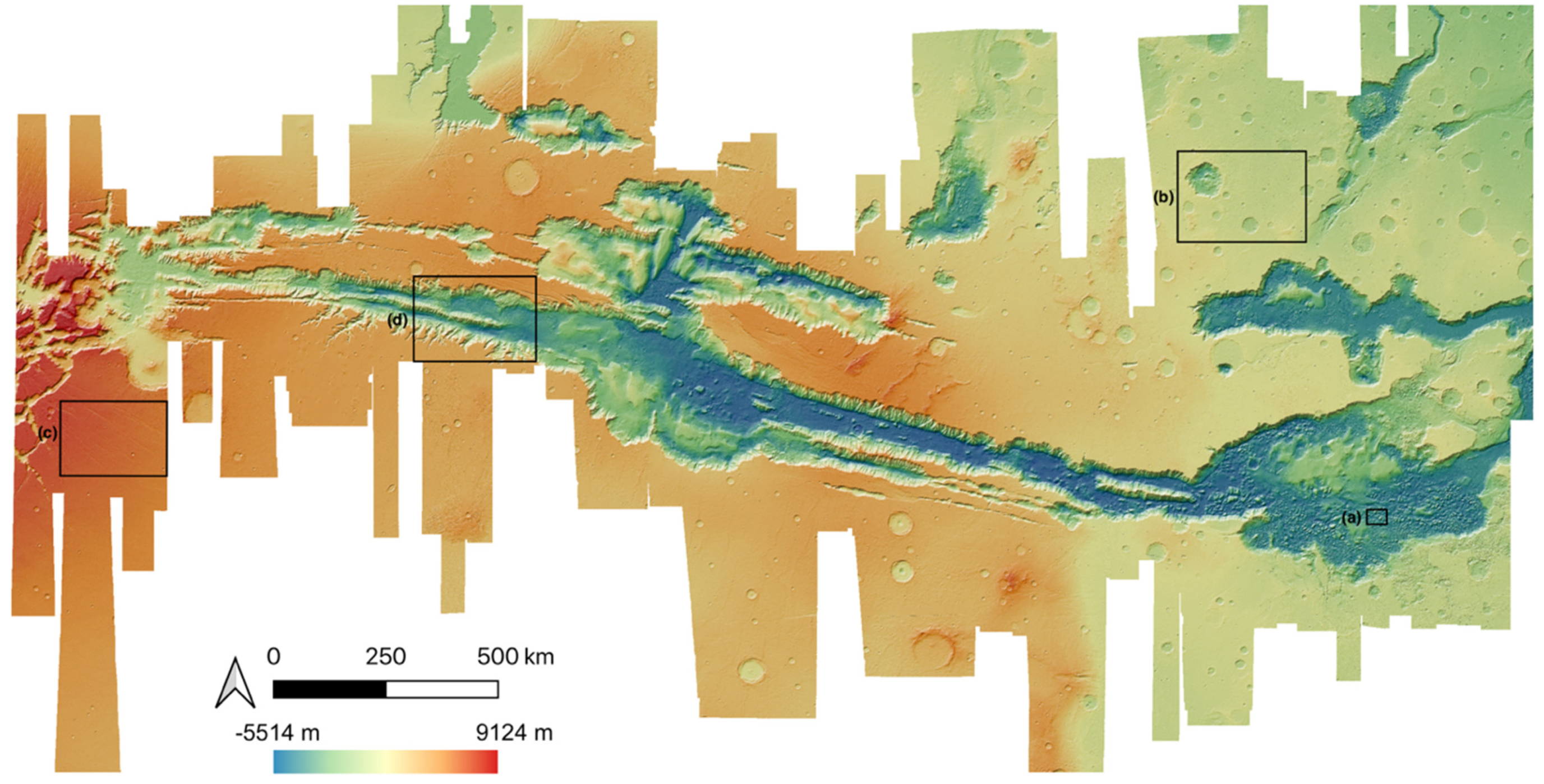
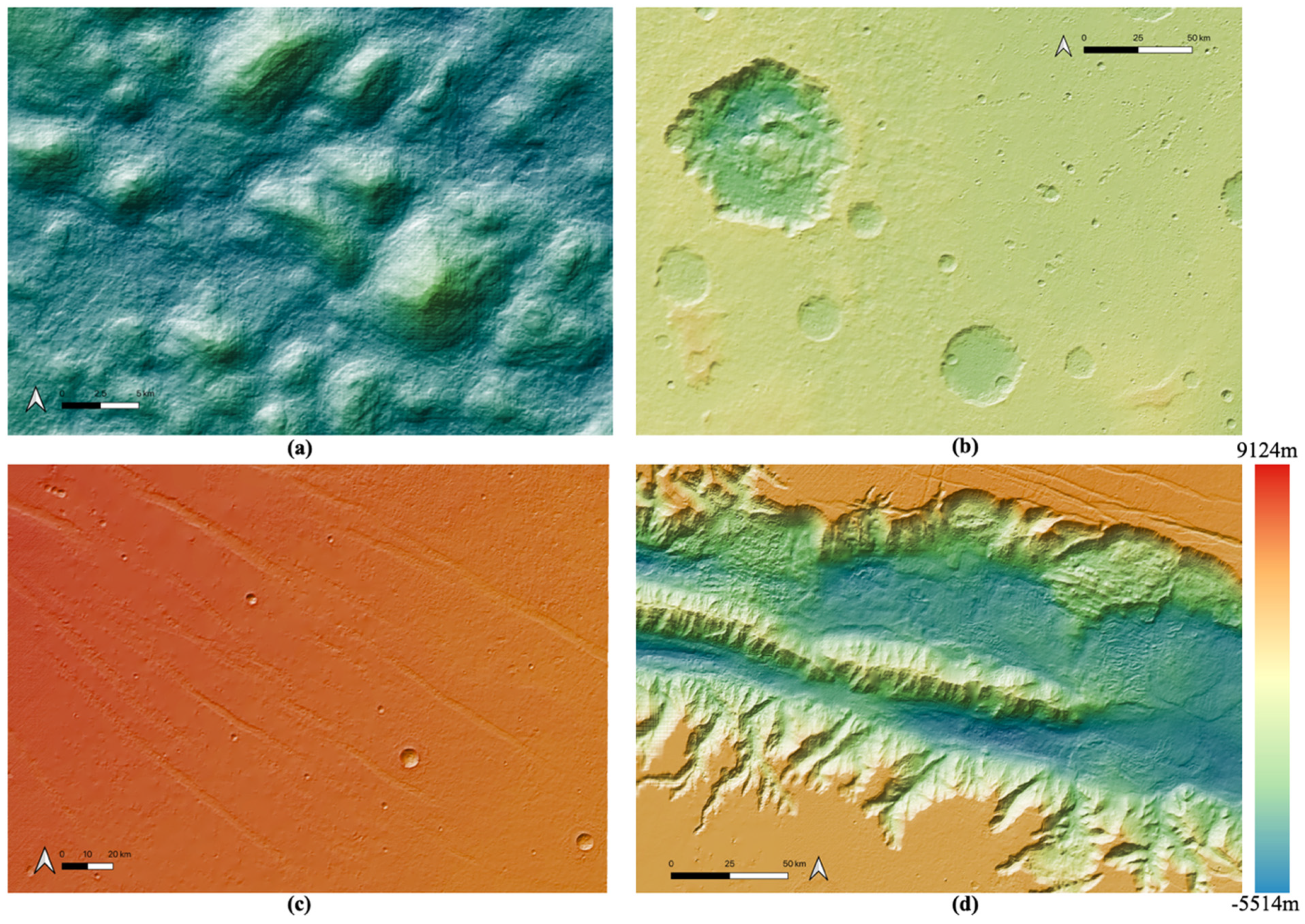
3.2. HRSC ORI Mosaic for Valles Marineris
3.3. Access to the Products
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Montgomery, D.R.; Som, S.M.; Jackson, M.P.; Schreiber, B.C.; Gillespie, A.R.; Adams, J.B. Continental-scale salt tectonics on Mars and the origin of Valles Marineris and associated outflow channels. Geol. Soc. Am. Bull. 2009, 121, 117–133. [Google Scholar] [CrossRef]
- Schultz, R.A.; Lin, J. Three-dimensional normal faulting models of the Valles Marineris, Mars, and geodynamic implications. J. Geophys. Res. Solid Earth 2001, 106, 16549–16566. [Google Scholar] [CrossRef]
- Andrews-Hanna, J.C. The formation of Valles Marineris: 1. Tectonic architecture and the relative roles of extension and subsidence. J. Geophys. Res. Planets 2012, 117. [Google Scholar] [CrossRef]
- Peulvast, J.P.; Mège, D.; Chiciak, J.; Costard, F.; Masson, P.L. Morphology, evolution and tectonics of Valles Marineris wallslopes (Mars). Geomorphology 2001, 37, 329–352. [Google Scholar] [CrossRef]
- Schultz, R.A. Multiple-process origin of Valles Marineris basins and troughs, Mars. Planet. Space Sci. 1998, 46, 827–834. [Google Scholar] [CrossRef]
- Rodriguez, J.A.P.; Kargel, J.S.; Baker, V.R.; Gulick, V.C.; Berman, D.C.; Fairén, A.G.; Glines, N. Martian outflow channels: How did their source aquifers form and why did they drain so rapidly? Sci. Rep. 2015, 5, 1–10. [Google Scholar]
- Warner, N.H.; Sowe, M.; Gupta, S.; Dumke, A.; Goddard, K. Fill and spill of giant lakes in the eastern Valles Marineris region of Mars. Geology 2013, 41, 675–678. [Google Scholar] [CrossRef]
- Coleman, N.M.; Baker, V.R. 9 Surface morphology and origin of outflow channels in the Valles Marineris region. In Megaflooding on Earth and Mars; Chapter 9; Cambridge University Press: Cambridge, UK, 2009; p. 172. [Google Scholar]
- Quantin, C.; Allemand, P.; Mangold, N.; Dromart, G.; Delacourt, C. Fluvial and lacustrine activity on layered deposits in Melas Chasma, Valles Marineris, Mars. J. Geophys. Res. Planets 2005, 110. [Google Scholar] [CrossRef]
- Weitz, C.M.; Milliken, R.E.; Grant, J.A.; McEwen, A.S.; Williams, R.M.E.; Bishop, J.L.; Thomson, B.J. Mars Reconnaissance Orbiter observations of light-toned layered deposits and associated fluvial landforms on the plateaus adjacent to Valles Marineris. Icarus 2010, 205, 73–102. [Google Scholar] [CrossRef]
- Mangold, N.; Ansan, V.; Masson, P.; Quantin, C.; Neukum, G. Geomorphic study of fluvial landforms on the northern Valles Marineris plateau, Mars. J. Geophys. Res. Planets 2008, 113. [Google Scholar] [CrossRef]
- McEwen, A.S.; Malin, M.C.; Carr, M.H.; Hartmann, W.K. Voluminous volcanism on early Mars revealed in Valles Marineris. Nature 1999, 397, 584–586. [Google Scholar] [CrossRef]
- Brož, P.; Hauber, E.; Wray, J.J.; Michael, G. Amazonian volcanism inside Valles Marineris on Mars. Earth Planet. Sci. Lett. 2017, 473, 122–130. [Google Scholar] [CrossRef]
- Brustel, C.; Flahaut, J.; Hauber, E.; Fueten, F.; Quantin, C.; Stesky, R.; Davies, G.R. Valles Marineris tectonic and volcanic history inferred from dikes in eastern Coprates Chasma. J. Geophys. Res. Planets 2017, 122, 1353–1371. [Google Scholar] [CrossRef]
- Chojnacki, M.; Moersch, J.E.; Burr, D.M. Climbing and falling dunes in Valles Marineris, Mars. Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef]
- Chojnacki, M.; Fenton, L.K.; Weintraub, A.R.; Edgar, L.A.; Jodhpurkar, M.J.; Edwards, C.S. Ancient Martian aeolian sand dune deposits recorded in the stratigraphy of Valles Marineris and implications for past climates. J. Geophys. Res. Planets 2020, 125, e2020JE006510. [Google Scholar] [CrossRef]
- Boazman, S.J.; Davis, J.M.; Grindrod, P.M.; Balme, M.R.; Vermeesch, P.; Baird, T. Measuring Ripple and Dune Migration in Coprates Chasma, Valles Marineris: A Source to Sink Aeolian System on Mars? J. Geophys. Res. Planets 2021, 126, e2020JE006608. [Google Scholar] [CrossRef]
- Mège, D.; Bourgeois, O. Equatorial glaciations on Mars revealed by gravitational collapse of Valles Marineris wallslopes. Earth Planet. Sci. Lett. 2011, 310, 182–191. [Google Scholar] [CrossRef]
- Gourronc, M.; Bourgeois, O.; Mège, D.; Pochat, S.; Bultel, B.; Massé, M.; Mercier, D. One million cubic kilometers of fossil ice in Valles Marineris: Relicts of a 3.5 Gy old glacial landsystem along the Martian equator. Geomorphology 2014, 204, 235–255. [Google Scholar] [CrossRef]
- Möhlmann, D.T.; Niemand, M.; Formisano, V.; Savijärvi, H.; Wolkenberg, P. Fog phenomena on Mars. Planet. Space Sci. 2009, 57, 1987–1992. [Google Scholar] [CrossRef]
- Inada, A.; Garcia-Comas, M.; Altieri, F.; Gwinner, K.; Poulet, F.; Bellucci, G.; Bibring, J.P. Dust haze in Valles Marineris observed by HRSC and OMEGA on board Mars Express. J. Geophys. Res. Planets 2008, 113. [Google Scholar] [CrossRef]
- Nedell, S.S.; Squyres, S.W.; Andersen, D.W. Origin and evolution of the layered deposits in the Valles Marineris, Mars. Icarus 1987, 70, 409–441. [Google Scholar] [CrossRef]
- Murchie, S.; Roach, L.; Seelos, F.; Milliken, R.; Mustard, J.; Arvidson, R.; Morris, R. Evidence for the origin of layered deposits in Candor Chasma, Mars, from mineral composition and hydrologic modeling. J. Geophys. Res. Planets 2009, 114. [Google Scholar] [CrossRef]
- Roach, L.H.; Mustard, J.F.; Swayze, G.; Milliken, R.E.; Bishop, J.L.; Murchie, S.L.; Lichtenberg, K. Hydrated mineral stratigraphy of Ius Chasma, Valles Marineris. Icarus 2010, 206, 253–268. [Google Scholar] [CrossRef]
- Lucchitta, B.K. Landslides in valles marineris, mars. J. Geophys. Res. Solid Earth 1979, 84, 8097–8113. [Google Scholar] [CrossRef]
- Lucas, A.; Mangeney, A. Mobility and topographic effects for large Valles Marineris landslides on Mars. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Quantin, C.; Allemand, P.; Delacourt, C. Morphology and geometry of Valles Marineris landslides. Planet. Space Sci. 2004, 52, 1011–1022. [Google Scholar] [CrossRef]
- Brunetti, M.T.; Guzzetti, F.; Cardinali, M.; Fiorucci, F.; Santangelo, M.; Mancinelli, P.; Borselli, L. Analysis of a new geomorphological inventory of landslides in Valles Marineris, Mars. Earth Planet. Sci. Lett. 2014, 405, 156–168. [Google Scholar] [CrossRef]
- McEwen, A.S. Mobility of large rock avalanches: Evidence from Valles Marineris, Mars. Geology 1989, 17, 1111–1114. [Google Scholar] [CrossRef]
- Lucas, A.; Mangeney, A.; Ampuero, J.P. Frictional velocity-weakening in landslides on Earth and on other planetary bodies. Nat. Commun. 2014, 5, 1–9. [Google Scholar] [CrossRef]
- Johnson, B.C.; Campbell, C.S. Drop height and volume control the mobility of long-runout landslides on the Earth and Mars. Geophys. Res. Lett. 2017, 44, 12091–12097. [Google Scholar] [CrossRef]
- McEwen, A.S.; Dundas, C.M.; Mattson, S.S.; Toigo, A.D.; Ojha, L.; Wray, J.J.; Thomas, N. Recurring slope lineae in equatorial regions of Mars. Nat. Geosci. 2014, 7, 53–58. [Google Scholar] [CrossRef]
- McEwen, A.S.; Ojha, L.; Dundas, C.M.; Mattson, S.S.; Byrne, S.; Wray, J.J.; Gulick, V.C. Seasonal flows on warm Martian slopes. Science 2011, 333, 740–743. [Google Scholar] [CrossRef]
- Stillman, D.E.; Michaels, T.I.; Grimm, R.E. Characteristics of the numerous and widespread recurring slope lineae (RSL) in Valles Marineris, Mars. Icarus 2017, 285, 195–210. [Google Scholar] [CrossRef]
- Stillman, D.E.; Bue, B.D.; Wagstaff, K.L.; Primm, K.M.; Michaels, T.I.; Grimm, R.E. Evaluation of wet and dry recurring slope lineae (RSL) formation mechanisms based on quantitative mapping of RSL in Garni Crater, Valles Marineris, Mars. Icarus 2020, 335, 113420. [Google Scholar] [CrossRef]
- Chojnacki, M.; McEwen, A.; Dundas, C.; Ojha, L.; Urso, A.; Sutton, S. Geologic context of recurring slope lineae in Melas and Coprates Chasmata, Mars. J. Geophys. Res. Planets 2016, 121, 1204–1231. [Google Scholar] [CrossRef]
- Smith, D.E.; Zuber, M.T.; Frey, H.V.; Garvin, J.B.; Head, J.W.; Muhleman, D.O.; Pettengill, G.H.; Phillips, R.J.; Solomon, S.C.; Zwally, H.J.; et al. Mars Orbiter Laser Altimeter - Experiment summary after the first year of global mapping of Mars. J. Geophys. Res. 2001, 106, 23689–23722. [Google Scholar] [CrossRef]
- Neukum, G.; Jaumann, R. HRSC: The high resolution stereo camera of Mars Express. Sci. Payload 2004, 1240, 17–35. [Google Scholar]
- Tao, Y.; Muller, J.-P.; Sidiropoulos, P.; Xiong, S.-T.; Putri, A.R.D.; Walter, S.H.G.; Veitch-Michaelis, J.; Yershov, V. Massive Stereo-based DTM Production for Mars on Cloud Computers. Planet. Space Sci. 2018, 154, 30–58. [Google Scholar] [CrossRef]
- Christensen, P.R.; Bandfield, J.L.; Hamilton, V.E.; Ruff, S.W.; Kieffer, H.H.; Titus, T.N.; Malin, M.C.; Morris, R.V.; Lane, M.D.; Clark, R.L.; et al. Mars Global Surveyor Thermal Emission Spectrometer experiment: Investigation description and surface science results. J. Geophys. Res. Planets 2001, 106, 23823–23872. [Google Scholar] [CrossRef]
- Michael, G.G.; Walter, S.H.G.; Kneissl, T.; Zuschneid, W.; Gross, C.; McGuire, P.C.; Dumke, A.; Schreiner, B.; Van Gasselt, S.; Gwinner, K.; et al. Systematic processing of Mars Express HRSC panchromatic and colour image mosaics: Image equalisation using an external brightness reference. Planet. Space Sci. 2016, 121, 18–26. [Google Scholar] [CrossRef]
- Gwinner, K.; Scholten, F.; Spiegel, M.; Schmidt, R.; Giese, B.; Oberst, J.; Jaumann, R.; Neukum, G. Derivation and Validation of High-Resolution Digital Terrain Models from Mars Express HRSC data. Photogramm. Eng. Remote Sens. 2009, 75, 1127–1142. [Google Scholar] [CrossRef]
- Beyer, R.; Alexandrov, O.; McMichael, S. The Ames Stereo Pipeline: NASA’s Opensource Software for Deriving and Processing Terrain Data. Earth Space Sci. 2018, 5, 537–548. [Google Scholar] [CrossRef]
- Tao, Y.; Muller, J.-P.; Poole, W.D. Automated localisation of Mars rovers using co-registered HiRISE-CTX-HRSC orthorectified images and DTMs. Icarus 2016, 280, 139–157. [Google Scholar] [CrossRef]
- Shin, D.; Muller, J.-P. Progressively weighted affine adaptive correlation matching for quasi-dense 3D reconstruction. Pattern Recognit. 2012, 45, 3795–3809. [Google Scholar] [CrossRef]
- Gwinner, K.; Jaumann, R.; Hauber, E.; Hoffmann, H.; Heipke, C.; Oberst, J.; Neukum, G.; Ansan, V.; Bostelmann, J.; Dumke, A.; et al. The High Resolution Stereo Camera (HRSC) of Mars Express and its approach to science analysis and mapping for Mars and its satellites. Planet. Space Sci. 2016, 126, 93–138. [Google Scholar] [CrossRef]
- Putri, A.R.D.; Sidiropoulos, P.; Muller, J.P.; Walter, S.H.; Michael, G.G. A New South Polar Digital Terrain Model of Mars from the High-Resolution Stereo Camera (HRSC) onboard the ESA Mars Express. Planet. Space Sci. 2019, 174, 43–55. [Google Scholar] [CrossRef]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef]
- Facciolo, G.; Franchis, C.; Meinhardt, E. MGM: A significantly more global matching for stereovision. In Proceedings of the British Machine Vision Conference (BMVC), Swansea, UK, 7–10 September 2015; p. 90. [Google Scholar]
- Amberg, B.; Romdhani, S.; Vetter, T. Optimal Step Nonrigid ICP Algorithms for Surface Registration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Minneapolis, MN, USA, 17–22 June 2007; pp. 1–8. [Google Scholar]
- Mörwald, T.; Balzer, J.; Vincze, M. Modeling connected regions in arbitrary planar point clouds by robust B-spline approximation. Robot. Auton. Syst. 2016, 76, 141–151. [Google Scholar] [CrossRef]
- Walter, S.H.G.; Muller, J.-P.; Sidiropoulos, P.; Tao, Y.; Gwinner, K.; Putri, A.R.D.; Kim, J.R.; Steikert, R.; Gasselt, S.V.; Michael, G.G.; et al. The Web-Based Interactive Mars Analysis and Research System for HRSC and the iMars Project. JGR/ESS Spec. Issue Planet. Mapp. Methods Tools Sci. Anal. Explor. 2018, 5, 308–3235. [Google Scholar] [CrossRef]
- Muller, J.-P.; Tao, Y.; Putri, A.R.D.; Watson, G.; Beyer, R.; Alexandrov, O.; McMichael, S.; Besse, S.; Grotheer, E. 3D Imaging tools and geospatial services from joint European-USA collaborations. In Proceedings of the EPSC-DPS Joint Meeting 2019, Geneva, Switzerland, 15–20 September 2019; Volume 13. EPSC–DPS2019–1355–2. [Google Scholar]
- Xiao, M.; Zhang, G.; Breitkopf, P.; Villon, P.; Zhang, W. Extended Co-Kriging interpolation method based on multi-fidelity data. Appl. Math. Comput. 2018, 323, 120–131. [Google Scholar] [CrossRef]
- Douté, S.; Jiang, C. Small-Scale Topographical Characterization of the Martian Surface with In-Orbit Imagery. IEEE Trans. Geosci. Remote Sens. 2019, 58, 447–460. [Google Scholar] [CrossRef]























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, Y.; Michael, G.; Muller, J.-P.; Conway, S.J.; Putri, A.R.D. Seamless 3D Image Mapping and Mosaicing of Valles Marineris on Mars Using Orbital HRSC Stereo and Panchromatic Images. Remote Sens. 2021, 13, 1385. https://doi.org/10.3390/rs13071385
Tao Y, Michael G, Muller J-P, Conway SJ, Putri ARD. Seamless 3D Image Mapping and Mosaicing of Valles Marineris on Mars Using Orbital HRSC Stereo and Panchromatic Images. Remote Sensing. 2021; 13(7):1385. https://doi.org/10.3390/rs13071385
Chicago/Turabian StyleTao, Yu, Greg Michael, Jan-Peter Muller, Susan J. Conway, and Alfiah R. D. Putri. 2021. "Seamless 3D Image Mapping and Mosaicing of Valles Marineris on Mars Using Orbital HRSC Stereo and Panchromatic Images" Remote Sensing 13, no. 7: 1385. https://doi.org/10.3390/rs13071385
APA StyleTao, Y., Michael, G., Muller, J.-P., Conway, S. J., & Putri, A. R. D. (2021). Seamless 3D Image Mapping and Mosaicing of Valles Marineris on Mars Using Orbital HRSC Stereo and Panchromatic Images. Remote Sensing, 13(7), 1385. https://doi.org/10.3390/rs13071385