
Mapping Drainage Structures Using Airborne Laser Scanning by Incorporating Road Centerline Information



Abstract
1. Introduction
2. Study Sites and Available Datasets
2.1. Study Sites
2.2. Datasets
2.2.1. ALS Point Clouds
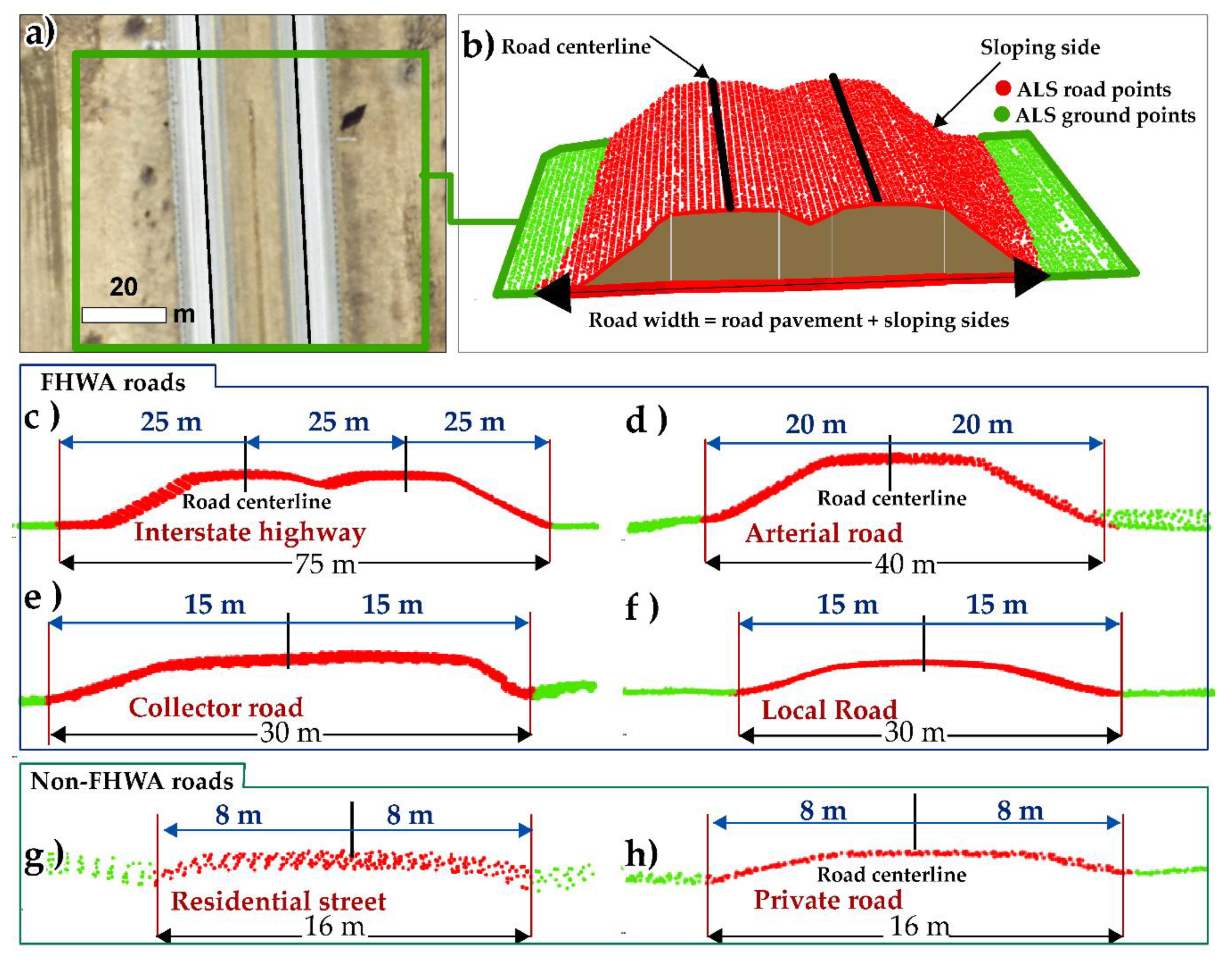
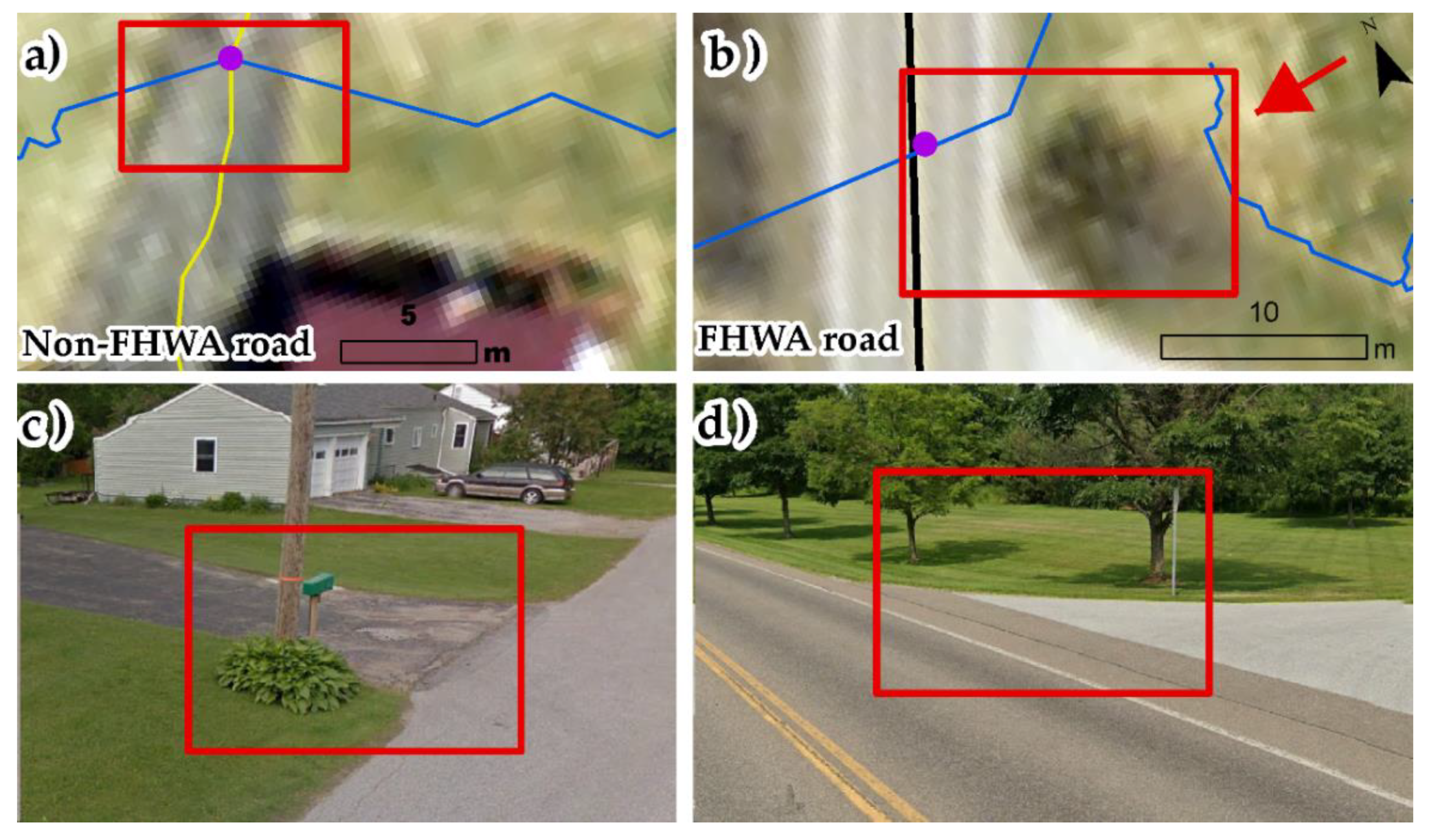
2.2.2. Centerlines of FHWA Roads
2.2.3. Centerlines of Non-FHWA Roads
2.2.4. Benchmark DS Dataset
2.2.5. Orthophotos
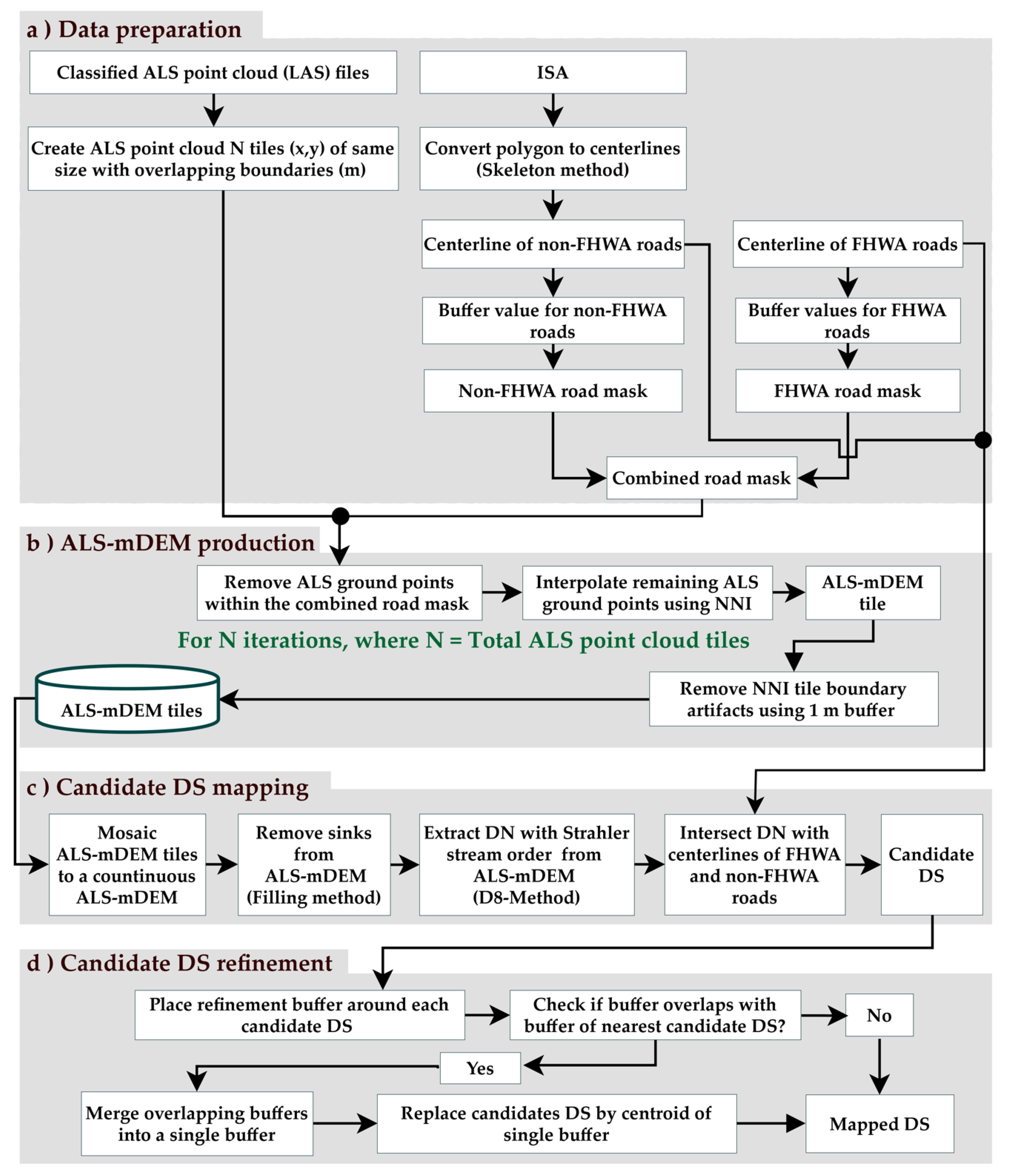
3. Methods
3.1. Data Preparation
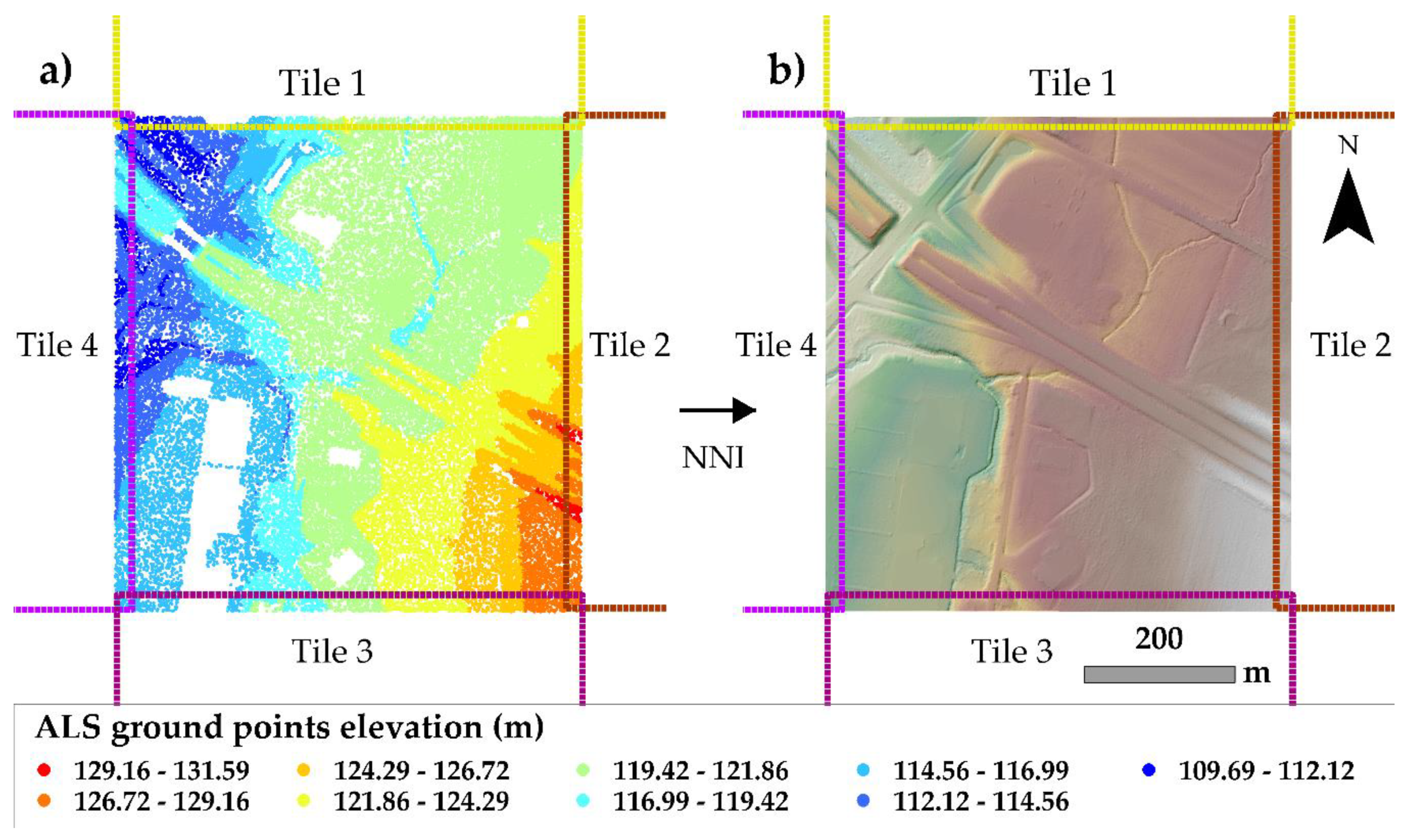
3.1.1. ALS Data Tiling
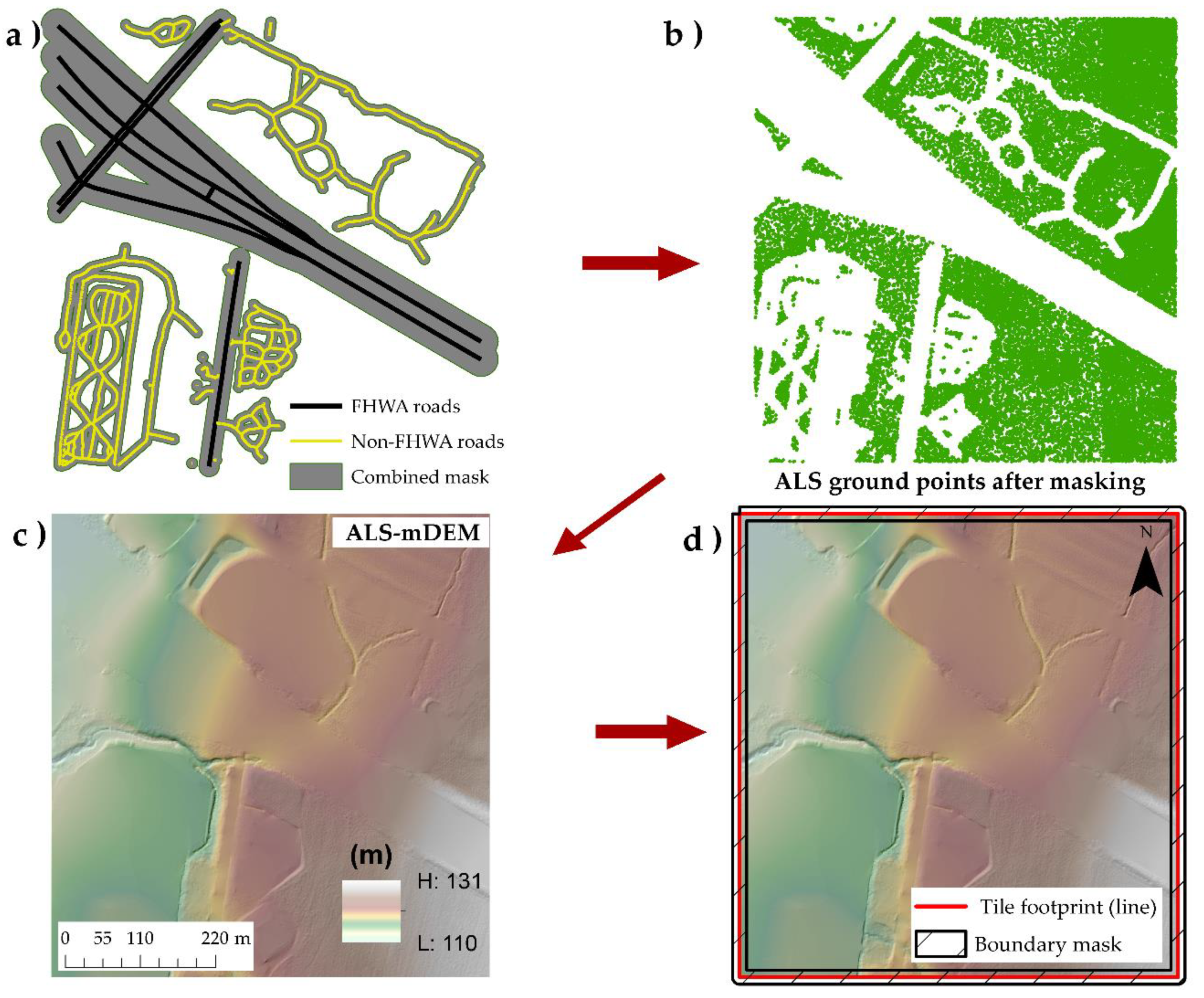
3.1.2. Creating a Combined Mask of FHWA and Non-FHWA Roads
3.2. ALS-mDEM Production
3.3. Candidate DS Mapping
3.4. Candidate DS Refinement
3.5. Accuracy Assessment
3.5.1. Positional Accuracy
3.5.2. Prediction Accuracy
4. Results
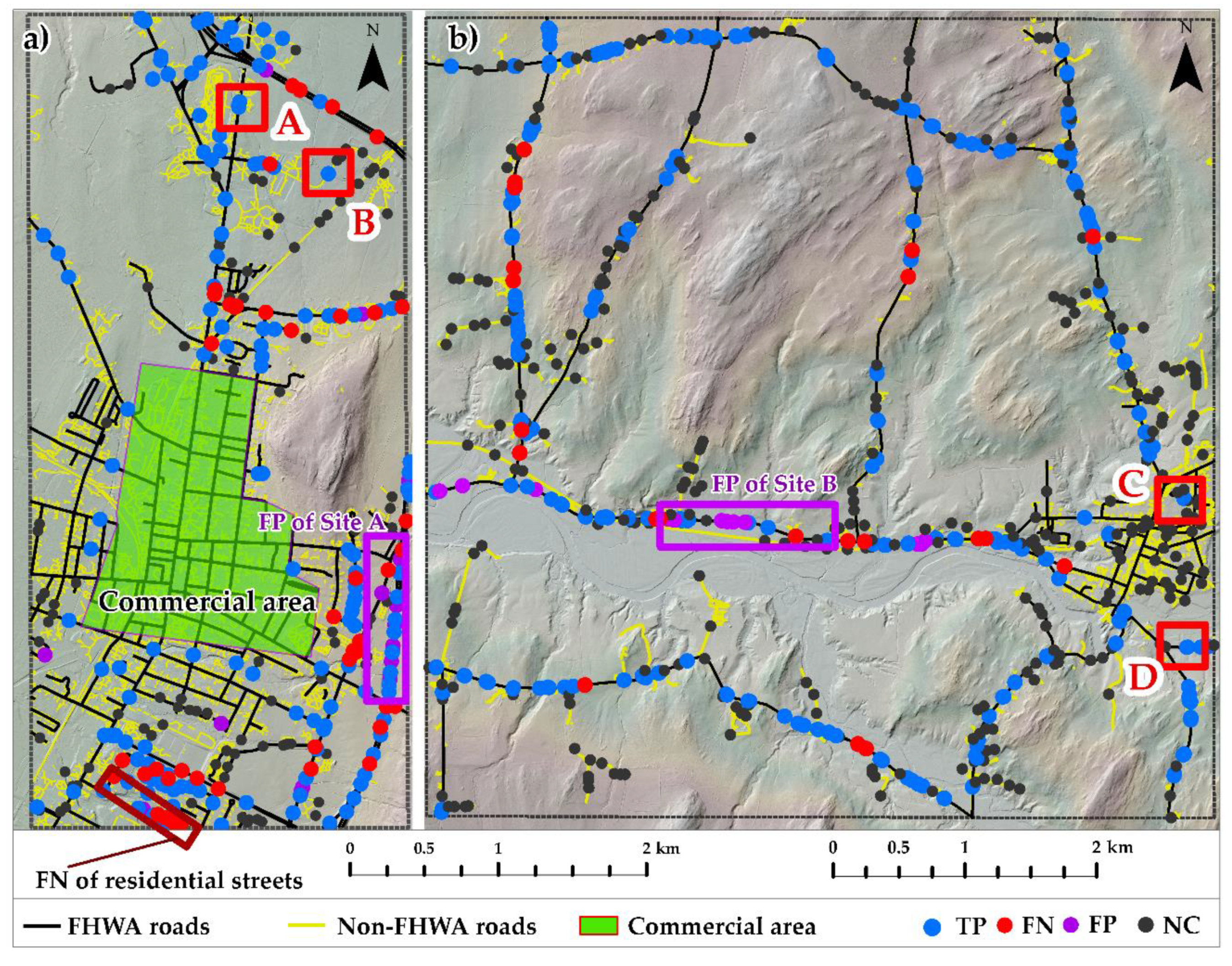
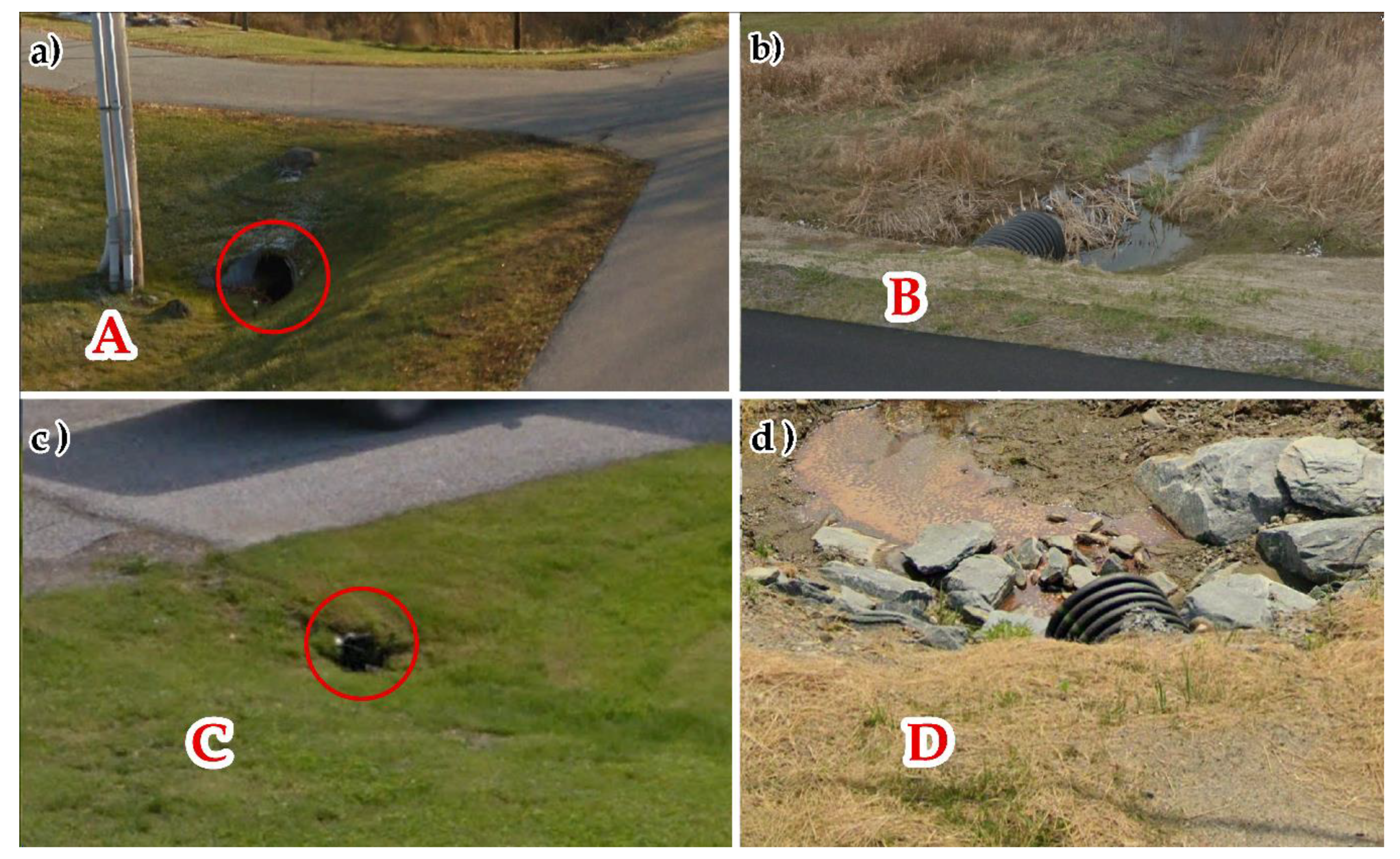
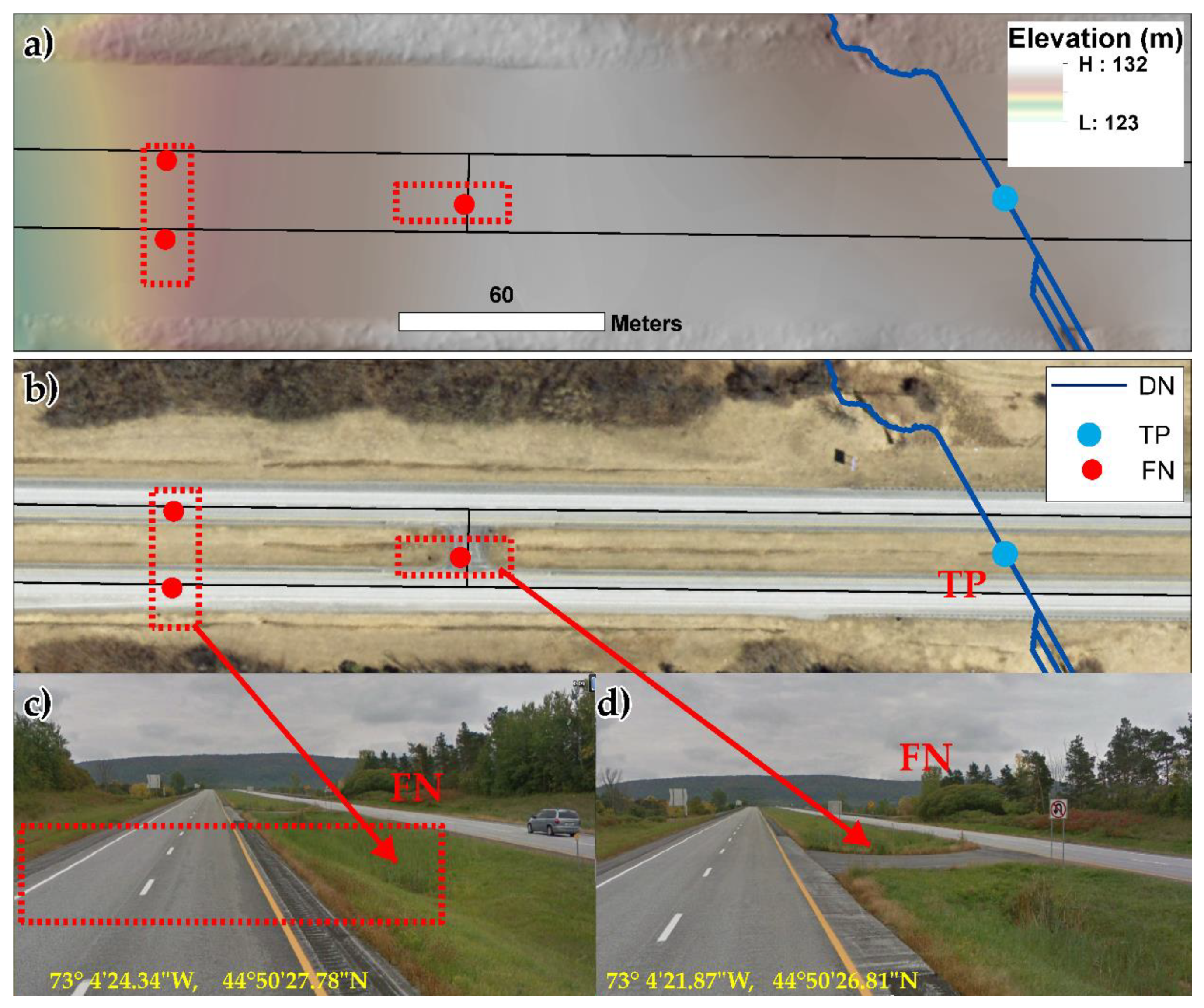
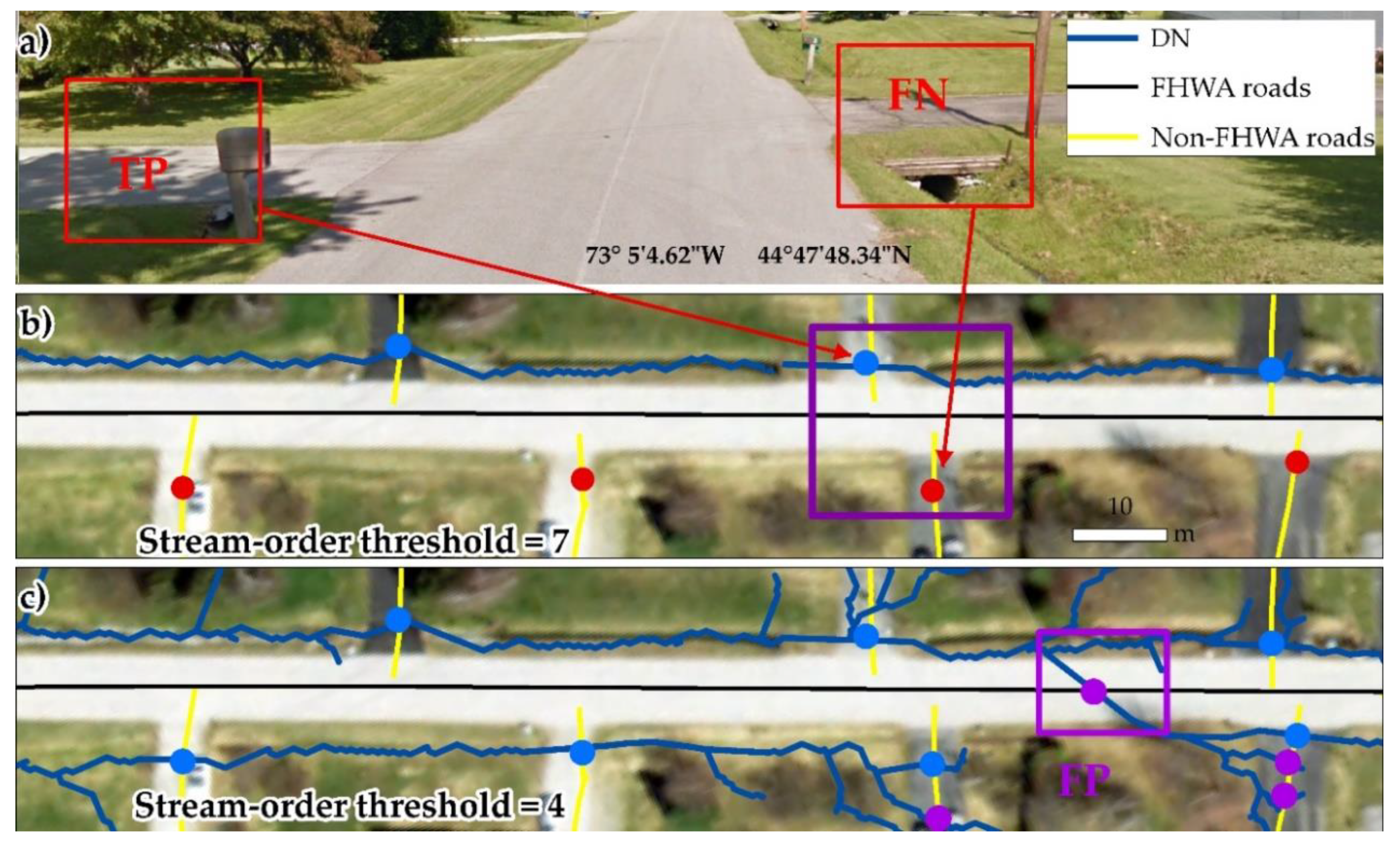
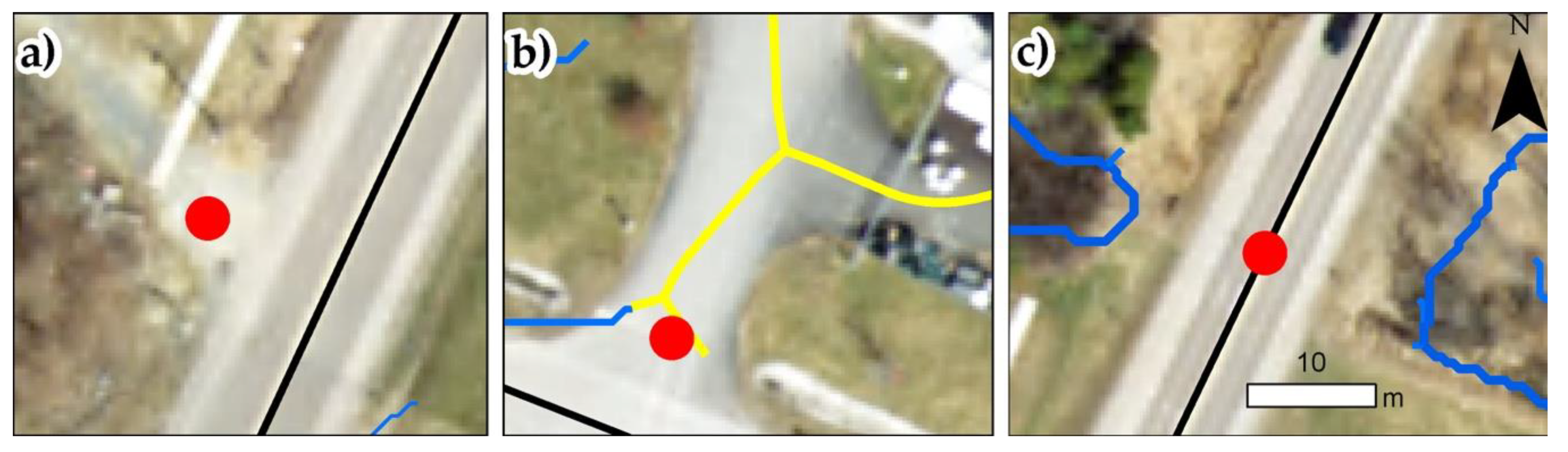
4.1. False Negative Cases
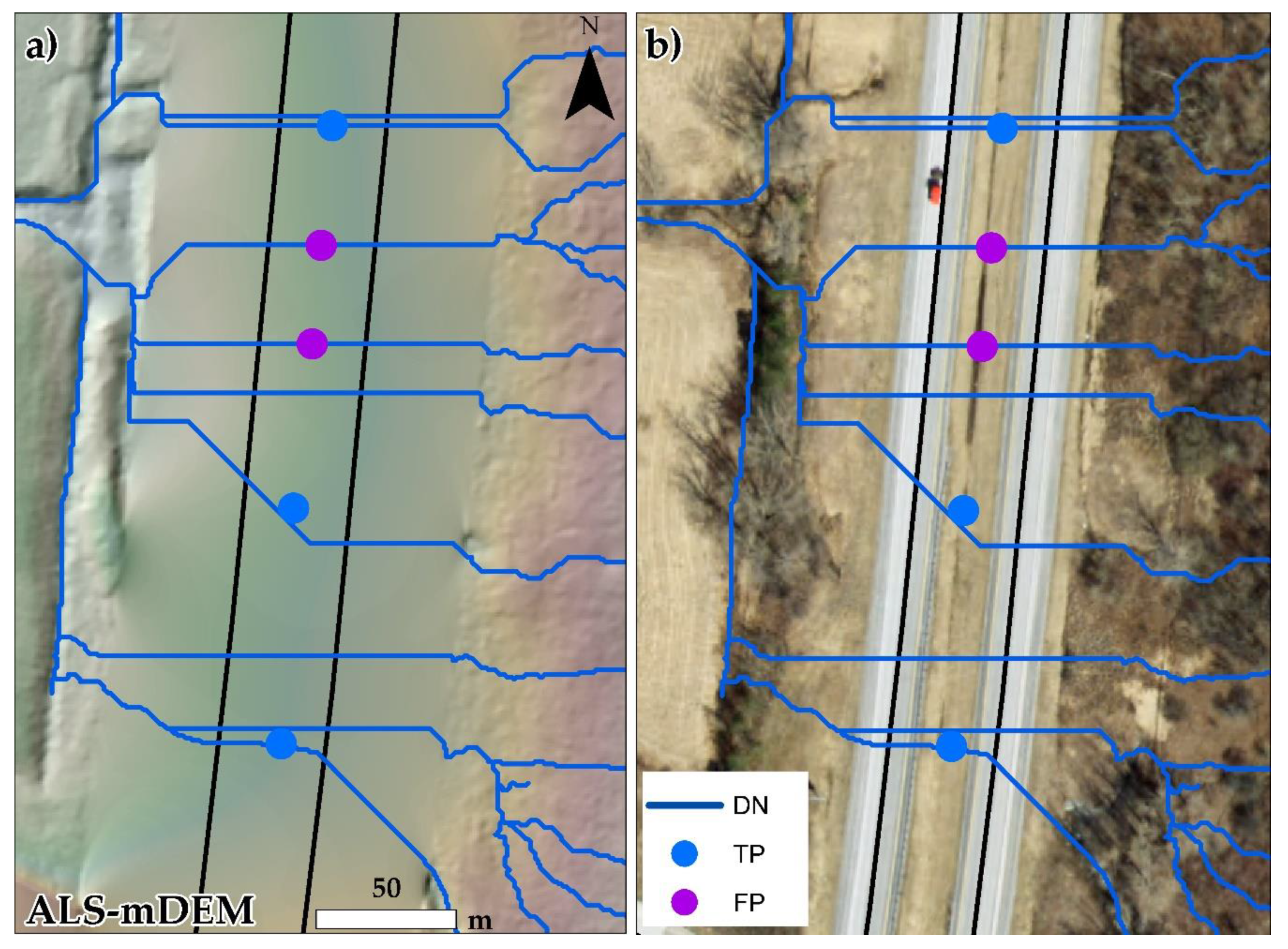
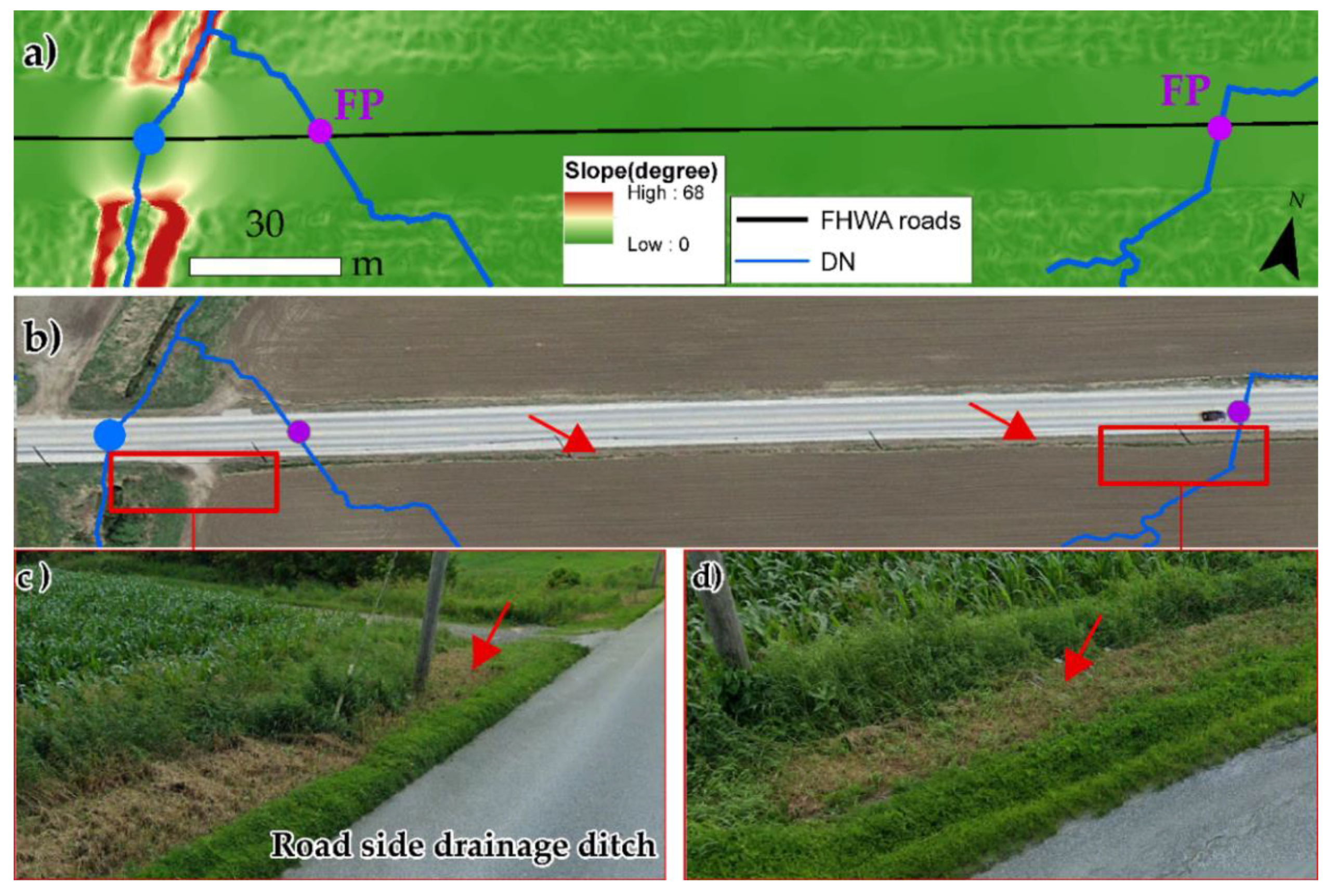
4.2. False Positive Cases
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Heidemann, H.K. Lidar Base Specification; 2328-7055; US Geological Survey: Reston, VA, USA, 2012.
- Meijer, J.R.; Huijbregts, M.A.J.; Schotten, K.C.G.J.; Schipper, A.M. Global patterns of current and future road infrastructure. Environ. Res. Lett. 2018, 13, 064006. [Google Scholar] [CrossRef]
- Koks, E.E.; Rozenberg, J.; Zorn, C.; Tariverdi, M.; Vousdoukas, M.; Fraser, S.A.; Hall, J.W.; Hallegatte, S. A global multi-hazard risk analysis of road and railway infrastructure assets. Nat. Commun. 2019, 10, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Pedrozo-Acuña, A.; Moreno, G.; Mejía-Estrada, P.; Paredes-Victoria, P.; Breña-Naranjo, J.; Meza, C. Integrated approach to determine highway flooding and critical points of drainage. Transp. Res. Part D Transp. Environ. 2017, 50, 182–191. [Google Scholar] [CrossRef]
- Chen, A.S.; Hsu, M.-H.; Huang, C.-J.; Lien, W.-Y. Analysis of the Sanchung inundation during Typhoon Aere, 2004. Nat. Hazards 2010, 56, 59–79. [Google Scholar] [CrossRef]
- Lwin, M.M.; Yen, W.P.; Shen, J.J. Effects of Hurricane Katrina on the Performance of U.S. Highway Bridges. J. Perform. Constr. Facil. 2014, 28, 40–48. [Google Scholar] [CrossRef]
- Bhattachar, D.V.; Najafi, M.; Salem, O.; Funkhouser, P.; Salman, B. Development of an Asset Management Framework for Culvert Inventory and Inspection. In Pipelines 2007: Advances and Experiences with Trenchless Pipeline Projects, Proceedings of the International Conference on Pipeline Engineering and Construction, Boston, MA, USA, 8–11 July 2007; American Society of Civil Engineers: Reston, VA, USA, 2007; pp. 1–11. [Google Scholar] [CrossRef]
- Venner, M.; Berger, L. Culvert Management Case Studies: Vermont, Oregon, Ohio and Los Angeles County; United States Federal Highway Administration: Washington, DC, USA, 2014.
- Najafi, M.; Bhattachar, D.V. Development of a culvert inventory and inspection framework for asset management of road structures. J. King Saud Univ. Sci. 2011, 23, 243–254. [Google Scholar] [CrossRef]
- Meegoda, J.; Juliano, T.; Potts, L.; Tang, C.; Marhaba, T. Implementation of a drainage information, analysis and management system. J. Traffic Transp. Eng. Eng. Ed. 2017, 4, 165–177. [Google Scholar] [CrossRef]
- Tarolli, P.; Sofia, G. Human topographic signatures and derived geomorphic processes across landscapes. Geomorphology 2016, 255, 140–161. [Google Scholar] [CrossRef]
- Dutta, D.; Teng, J.; Vaze, J.; Lerat, J.; Hughes, J.; Marvanek, S. Storage-based approaches to build floodplain inundation modelling capability in river system models for water resources planning and accounting. J. Hydrol. 2013, 504, 12–28. [Google Scholar] [CrossRef]
- Barber, C.P.; Shortridge, A. Lidar Elevation Data for Surface Hydrologic Modeling: Resolution and Representation Issues. Cartogr. Geogr. Inf. Sci. 2005, 32, 401–410. [Google Scholar] [CrossRef]
- Munoz, D.H.; Constantinescu, G. A fully 3-D numerical model to predict flood wave propagation and assess efficiency of flood protection measures. Adv. Water Resour. 2018, 122, 148–165. [Google Scholar] [CrossRef]
- Liu, Z.; Merwade, V. Accounting for model structure, parameter and input forcing uncertainty in flood inundation modeling using Bayesian model averaging. J. Hydrol. 2018, 565, 138–149. [Google Scholar] [CrossRef]
- Webster, T.L.; Forbes, D.L.; MacKinnon, E.; Roberts, D. Flood-risk mapping for storm-surge events and sea-level rise using lidar for southeast New Brunswick. Can. J. Remote Sens. 2006, 32, 194–211. [Google Scholar] [CrossRef]
- Pinos, J.; Timbe, L. Performance assessment of two-dimensional hydraulic models for generation of flood inundation maps in mountain river basins. Water Sci. Eng. 2019, 12, 11–18. [Google Scholar] [CrossRef]
- Li, R.; Tang, Z.; Li, X.; Winter, J. Drainage structure datasets and effects on LiDAR-Derived surface flow modeling. ISPRS Int. J. Geo-Inf. 2013, 2, 1136–1152. [Google Scholar] [CrossRef]
- Arendt, R.; Faulstich, L.; Jüpner, R.; Assmann, A.; Lengricht, J.; Kavishe, F.; Schulte, A. GNSS mobile road dam surveying for TanDEM-X correction to improve the database for floodwater modeling in northern Namibia. Environ. Earth Sci. 2020, 79, 1–15. [Google Scholar] [CrossRef]
- Bryndal, T.; Kroczak, R. Reconstruction and characterization of the surface drainage system functioning during extreme rainfall: The analysis with use of the ALS-LIDAR data—The case study in two small flysch catchments (Outer Carpathian, Poland). Environ. Earth Sci. 2019, 78, 215. [Google Scholar] [CrossRef]
- Poppenga, S.K.; Worstell, B.B. Hydrologic Connectivity: Quantitative Assessments of Hydrologic-Enforced Drainage Structures in an Elevation Model. J. Coast. Res. 2016, 76, 90–106. [Google Scholar] [CrossRef]
- Persendt, F.C.; Gomez, C. Assessment of drainage network extractions in a low-relief area of the Cuvelai Basin (Namibia) from multiple sources: LiDAR, topographic maps, and digital aerial orthophotographs. Geomorphology 2016, 260, 32–50. [Google Scholar] [CrossRef]
- Lidberg, W.; Nilsson, M.; Lundmark, T.; Ågren, A.M. Evaluating preprocessing methods of digital elevation models for hydrological modelling. Hydrol. Process. 2017, 31, 4660–4668. [Google Scholar] [CrossRef]
- Wall, J.; Doctor, D.; Terziotti, S. A Semi-automated Tool for Reducing the Creation of False Closed Depressions from a Filled LIDAR-derived Digital Elevation Model. In Sinkholes and the Engineering and Environmental Impacts of Karst, Proceedings of the Fourteenth Multidisciplinary Conference, Tampa, FL, USA, 10 October 2015; Scholar Commons: Tampa, FL, USA, 2015; pp. 255–262. [Google Scholar]
- Poppenga, S.K.; Gesch, D.B.; Worstell, B.B. Hydrography Change Detection: The Usefulness of Surface Channels Derived From LiDAR DEMs for Updating Mapped Hydrography. J. Am. Water Resour. Assoc. 2013, 49, 371–389. [Google Scholar] [CrossRef]
- Douglas, R.A.; Cochrane, H. Where Have All the Culverts Gone? Int. J. For. Eng. 2001, 12, 79–81. [Google Scholar] [CrossRef]
- Wu, T.; Li, J.; Li, T.; Sivakumar, B.; Zhang, G.; Wang, G. High-efficient extraction of drainage networks from digital elevation models constrained by enhanced flow enforcement from known river maps. Geomorphology 2019, 340, 184–201. [Google Scholar] [CrossRef]
- Carter, W.E.; Shrestha, R.L.; Slatton, K.C. Geodetic laser scanning. Phys. Today 2007, 60, 41. [Google Scholar] [CrossRef]
- Soilán, M.; Truong-Hong, L.; Riveiro, B.; Laefer, D. Automatic extraction of road features in urban environments using dense ALS data. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 226–236. [Google Scholar] [CrossRef]
- Roelens, J.; Rosier, I.; Dondeyne, S.; Van Orshoven, J.; Diels, J. Extracting drainage networks and their connectivity using LiDAR data. Hydrol. Process. 2018, 32, 1026–1037. [Google Scholar] [CrossRef]
- Amatya, D.; Trettin, C.; Panda, S.; Ssegane, H. Application of LiDAR data for hydrologic assessments of low-gradient coastal watershed drainage characteristics. J. Geogr. Inf. Syst. 2013, 5, 175–191. [Google Scholar] [CrossRef]
- DEMs, H.L. Hydrologic Enforcement of Lidar DEMs; U.S. Geological Survey: Reston, VA, USA, 2014.
- University of Vermont Spatial Analysis Laboratory. Impervious Surfaces for the the NY and VT Portions of the Lake Champlain Basin. 2011. Available online: https://maps.vcgi.vermont.gov/gisdata/metadata/LandLandcov_IMPERVLCB2011.htm (accessed on 28 March 2020).
- Krishnan, S.; Crosby, C.; Nandigam, V.; Phan, M.; Cowart, C.; Baru, C.; Arrowsmith, R. OpenTopography: A services oriented architecture for community access to LIDAR topography. In Proceedings of the 2nd International Conference on Computing for Geospatial Research & Applications, Washington, DC, USA, 23–25 May 2011; p. 7. [Google Scholar]
- Portal, V.O.G. VT Road Centerline. Available online: http://geodata.vermont.gov/datasets/1dee5cb935894f9abe1b8e7ccec1253e_39 (accessed on 15 July 2019).
- Dong, J.-X.; Cheng, T.; Xu, J.; Wu, J. Quantitative assessment of urban road network hierarchy planning. Town Plan. Rev. 2013, 84, 467–494. [Google Scholar] [CrossRef]
- Vermont Center for Geographic Information. Statewide High-Resolution Vermont Land Cover Data Now Available. Available online: https://geodata.vermont.gov/pages/land-cover#datasets (accessed on 18 August 2019).
- Weng, Q. Remote sensing of impervious surfaces in the urban areas: Requirements, methods, and trends. Remote Sens. Environ. 2012, 117, 34–49. [Google Scholar] [CrossRef]
- Schaefer, E.I.; Pelletier, J.D. An algorithm to reduce a river network or other graph-like polygon to a set of lines. Comput. Geosci. 2020, 104554. [Google Scholar] [CrossRef]
- Vermont Agency of Transportation. The Vermont Online Bridge and Culvert Inventory Tool “VOBCIT”. Available online: https://vtculverts.org/ (accessed on 11 November 2019).
- Anguelov, D.; Dulong, C.; Filip, D.; Frueh, C.; Lafon, S.; Lyon, R.; Ogale, A.; Vincent, L.; Weaver, J. Google street view: Capturing the world at street level. Computer 2010, 43, 32–38. [Google Scholar] [CrossRef]
- Vermont Center for Geographic Information. Vermont Imagery Program (VIP). Available online: https://geodata.vermont.gov/pages/imagery (accessed on 11 November 2019).
- Esri. Natural Neighbor. Available online: https://desktop.arcgis.com/en/arcmap/10.3/tools/spatial-analyst-toolbox/natural-neighbor.htm (accessed on 24 March 2020).
- Roussel, J.-R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Meador, A.S.; Bourdon, J.-F.; de Boissieu, F.; Achim, A. lidR: An R package for analysis of Airborne Laser Scanning (ALS) data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Cățeanu, M.; Ciubotaru, A. Accuracy of Ground Surface Interpolation from Airborne Laser Scanning (ALS) Data in Dense Forest Cover. ISPRS Int. J. Geo-Inf. 2020, 9, 224. [Google Scholar] [CrossRef]
- Hoover, P.L.B.D. A Seamless, High-Resolution, Coastal Digital Elevation Model (Dem) for Southern California; U.S. Geological Survey: Reston, VA, USA, 2009.
- Jenson, S.K.; Domingue, J.O. Extracting topographic structure from digital elevation data for geographic information system analysis. Photogramm. Eng. Remote Sens. 1988, 54, 1593–1600. [Google Scholar]
- O’Callaghan, J.F.; Mark, D.M. The extraction of drainage networks from digital elevation data. Comp. Vis. Graph. Image Process. 1984, 28, 323–344. [Google Scholar] [CrossRef]
- Shreve, R.L. Statistical law of stream numbers. J. Geol. 1966, 74, 17–37. [Google Scholar] [CrossRef]
- Scheidegger, A.E. The algebra of stream-order numbers. U. S. Geol. Surv. Prof. Pap. 1965, 525, 187–189. [Google Scholar]
- Ni, H.; Lin, X.; Zhang, J. Classification of ALS point cloud with improved point cloud segmentation and random forests. Remote Sens. 2017, 9, 288. [Google Scholar] [CrossRef]
- He, Y.; Song, Z.; Liu, Z. Updating highway asset inventory using airborne LiDAR. Measurement 2017, 104, 132–141. [Google Scholar] [CrossRef]
- Jafarzadegan, K.; Merwade, V. A DEM-based approach for large-scale floodplain mapping in ungauged watersheds. J. Hydrol. 2017, 550, 650–662. [Google Scholar] [CrossRef]
- Thatcher, C.A.; Lukas, V.; Stoker, J.M. The 3D Elevation Program and Energy for the Nation; U.S. Geological Survey: Reston, VA, USA, 2020; p. 2.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Sites | VTrans | GE-SV | Total |
|---|---|---|---|
| Site A—Urban | 139 | 48 | 187 |
| Site B—Rural | 148 | 18 | 166 |
| Class | Total Observations | Width Range (m) | Buffer (m) |
|---|---|---|---|
| Interstate Highway | 15 | 42–50 | 25 |
| Arterial Road | 15 | 30–40 | 20 |
| Collector Road | 15 | 25–30 | 15 |
| Local Road | 15 | 20–30 | 15 |
| Non-FHWA roads | 15 | 5–16 | 8 |
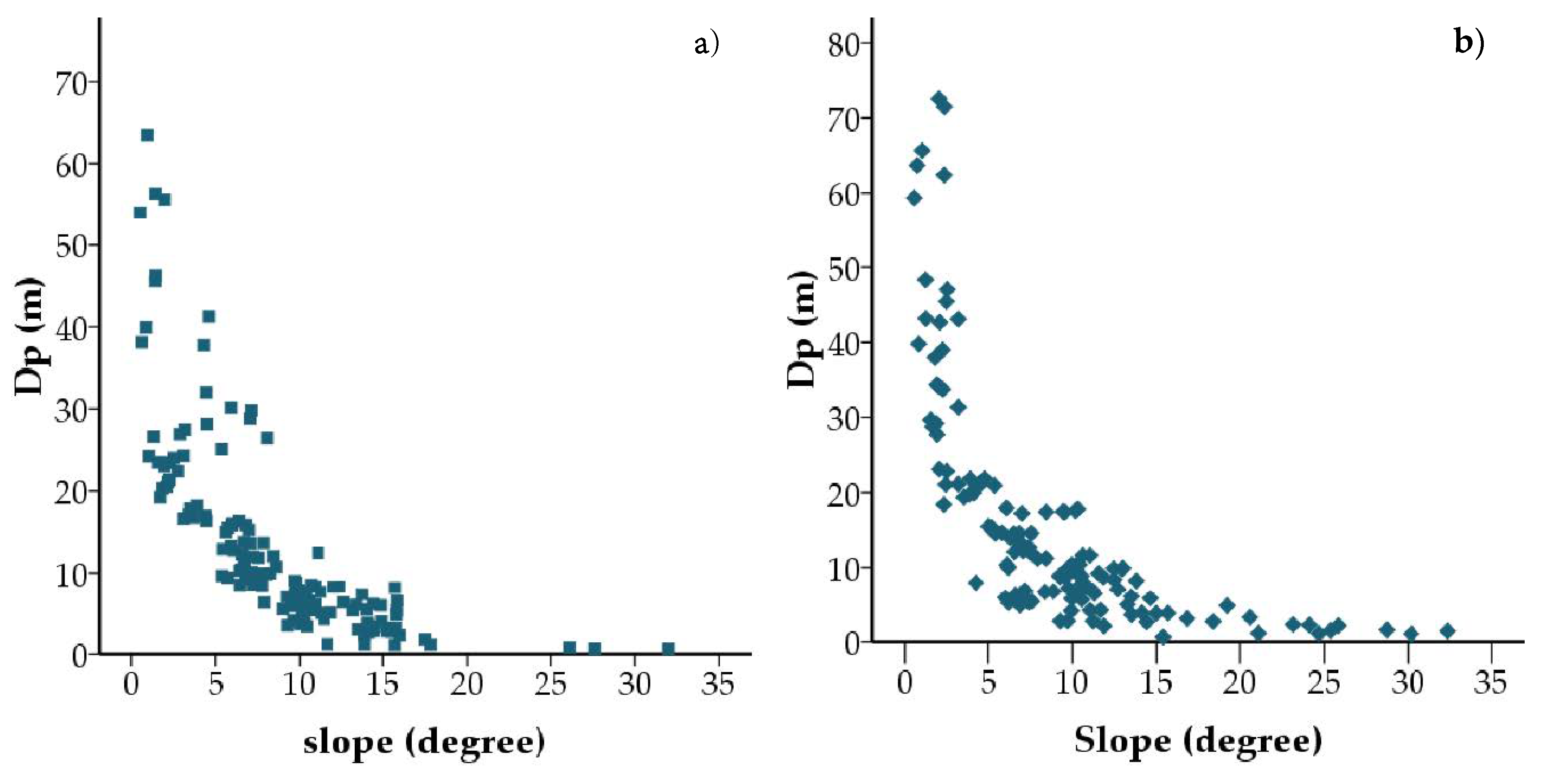
| Min | 1st Quartile | Median | 3rd Quartile | Max | Mean | |
|---|---|---|---|---|---|---|
| Urban Site A | 0.63 | 5.36 | 9.03 | 17.12 | 63.45 | 13.53 |
| Rural Site B | 0.65 | 5.71 | 10.17 | 10.17 | 72.53 | 15.82 |
| Road Type | F1-Score | P | R | |||||
|---|---|---|---|---|---|---|---|---|
| Urban Site A | FHWA roads | 94 | 17 | 12 | 0.87 | 0.89 | 0.85 | 12 |
| Non-FHWA roads | 46 | 30 | 7 | 0.72 | 0.87 | 0.61 | 86 | |
| Rural Site B | FHWA roads | 108 | 6 | 9 | 0.94 | 0.92 | 0.95 | 66 |
| Non-FHWA roads | 27 | 15 | 4 | 0.74 | 0.87 | 0.64 | 177 |
| Tile Settings | Processing Time in Each Stage | ||||||
|---|---|---|---|---|---|---|---|
| Area km2 | Tile Size km | Total Tiles | Data Preparation | ALS-mDEM | Candidate DS Mapping | Candidate DS Refinement | Total |
| 50 km2 | 1 × 1 | 49 | 15 | 46 | 190 | 7 | 258 |
| 2 × 2 | 12 | 15 | 26 | 123 | 7 | 171 | |
| 4 × 4 | 3 | 15 | 15 | 85 | 7 | 122 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.-K.; Fareed, N. Mapping Drainage Structures Using Airborne Laser Scanning by Incorporating Road Centerline Information. Remote Sens. 2021, 13, 463. https://doi.org/10.3390/rs13030463
Wang C-K, Fareed N. Mapping Drainage Structures Using Airborne Laser Scanning by Incorporating Road Centerline Information. Remote Sensing. 2021; 13(3):463. https://doi.org/10.3390/rs13030463
Chicago/Turabian StyleWang, Chi-Kuei, and Nadeem Fareed. 2021. "Mapping Drainage Structures Using Airborne Laser Scanning by Incorporating Road Centerline Information" Remote Sensing 13, no. 3: 463. https://doi.org/10.3390/rs13030463
APA StyleWang, C.-K., & Fareed, N. (2021). Mapping Drainage Structures Using Airborne Laser Scanning by Incorporating Road Centerline Information. Remote Sensing, 13(3), 463. https://doi.org/10.3390/rs13030463