
Ocean Front Detection with Glider and Satellite-Derived SST Data in the Southern California Current System

 , and
, and
Abstract
:
1. Introduction
2. Materials and Methods
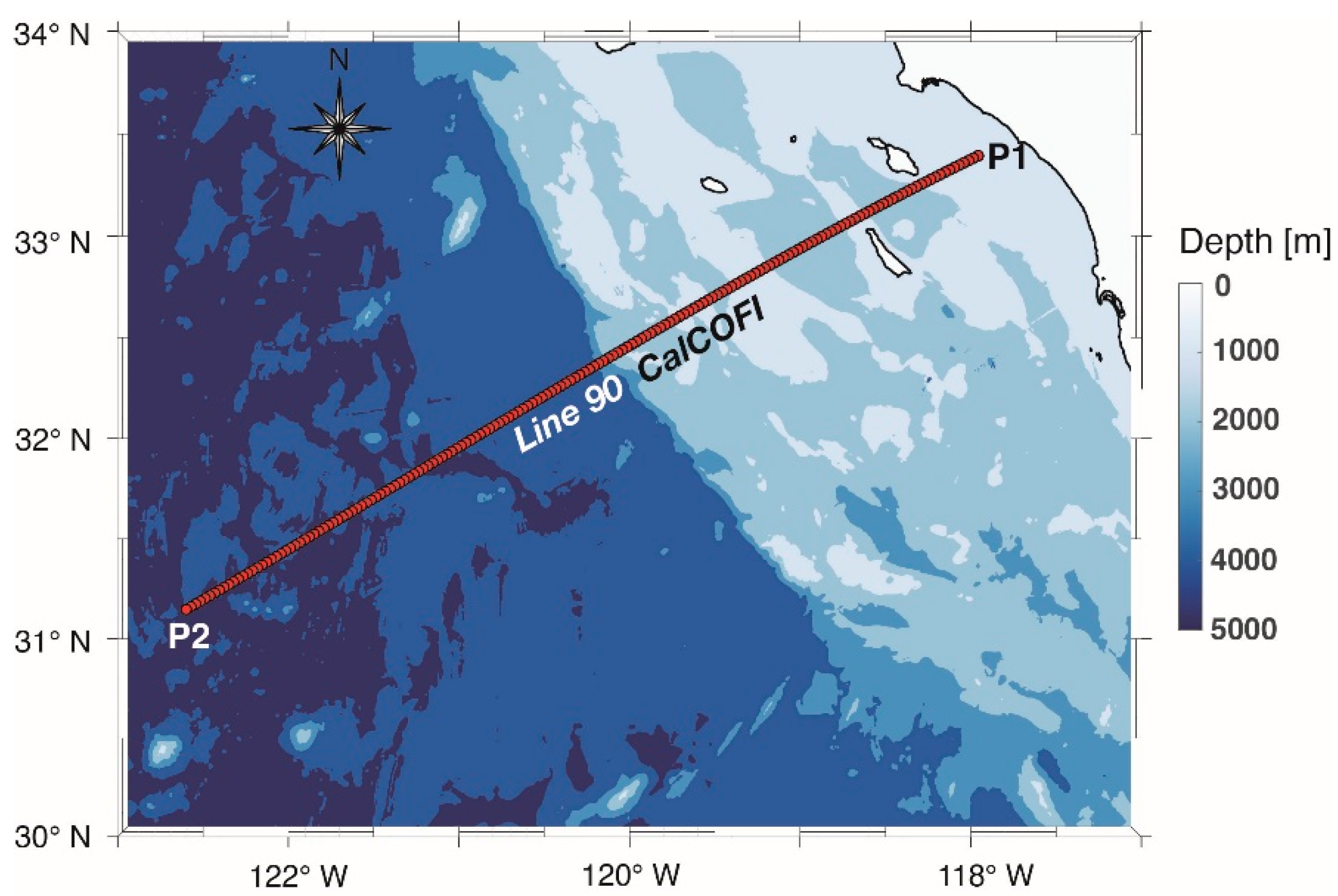
2.1. Observational Data
2.1.1. Glider Data
2.1.2. MUR Observations
2.2. Front Detection
2.2.1. Front Detection with Glider Data
2.2.2. Front Detection with MUR Data
2.3. Front Frequency
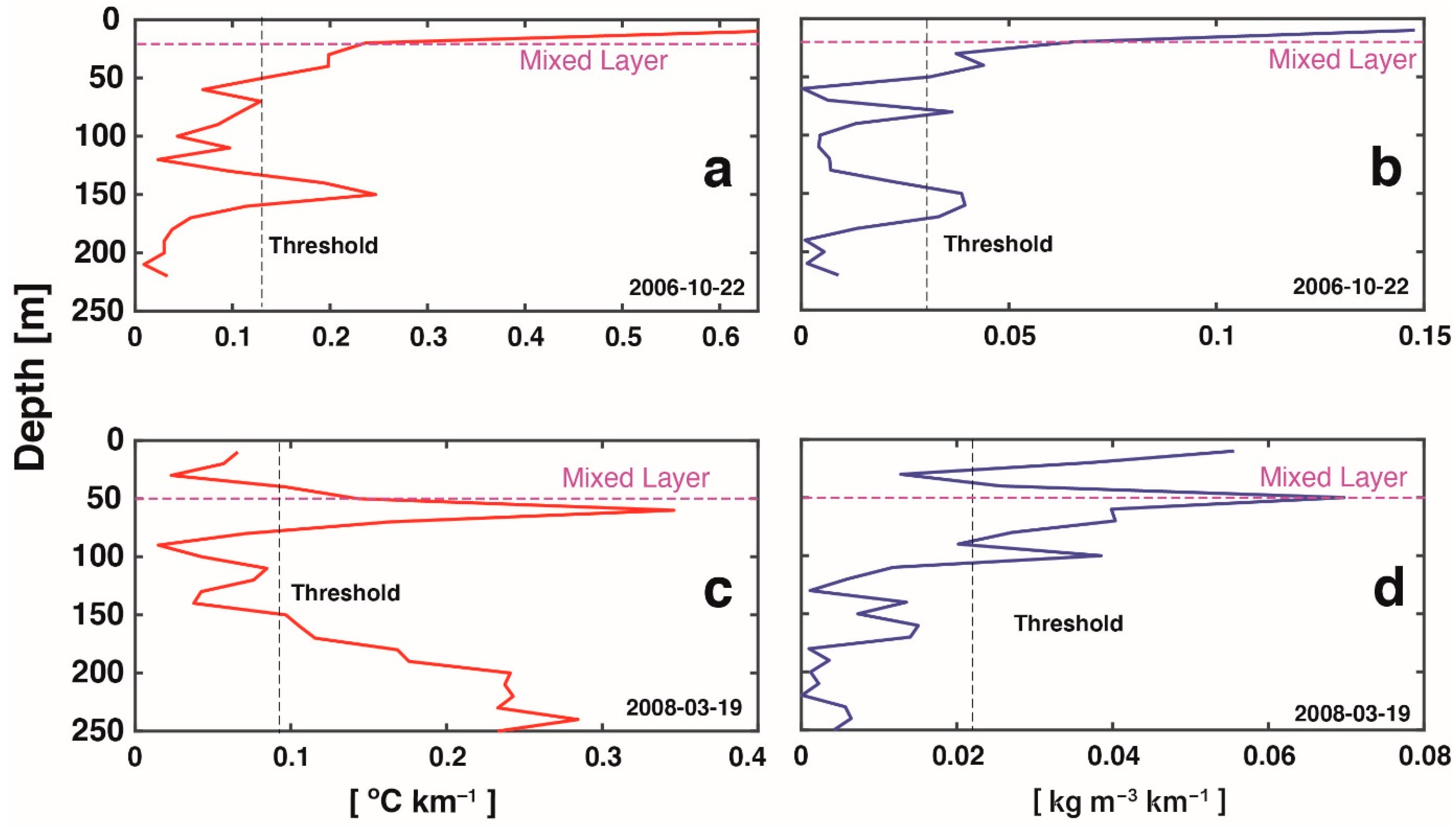
2.4. Thermohaline Compensation in Density and Temperature Fronts
- Ci = 1: no thermohaline compensation;
- Ci > 1: partial thermohaline compensation;
- Ci >> 1: total thermohaline compensation.
3. Results
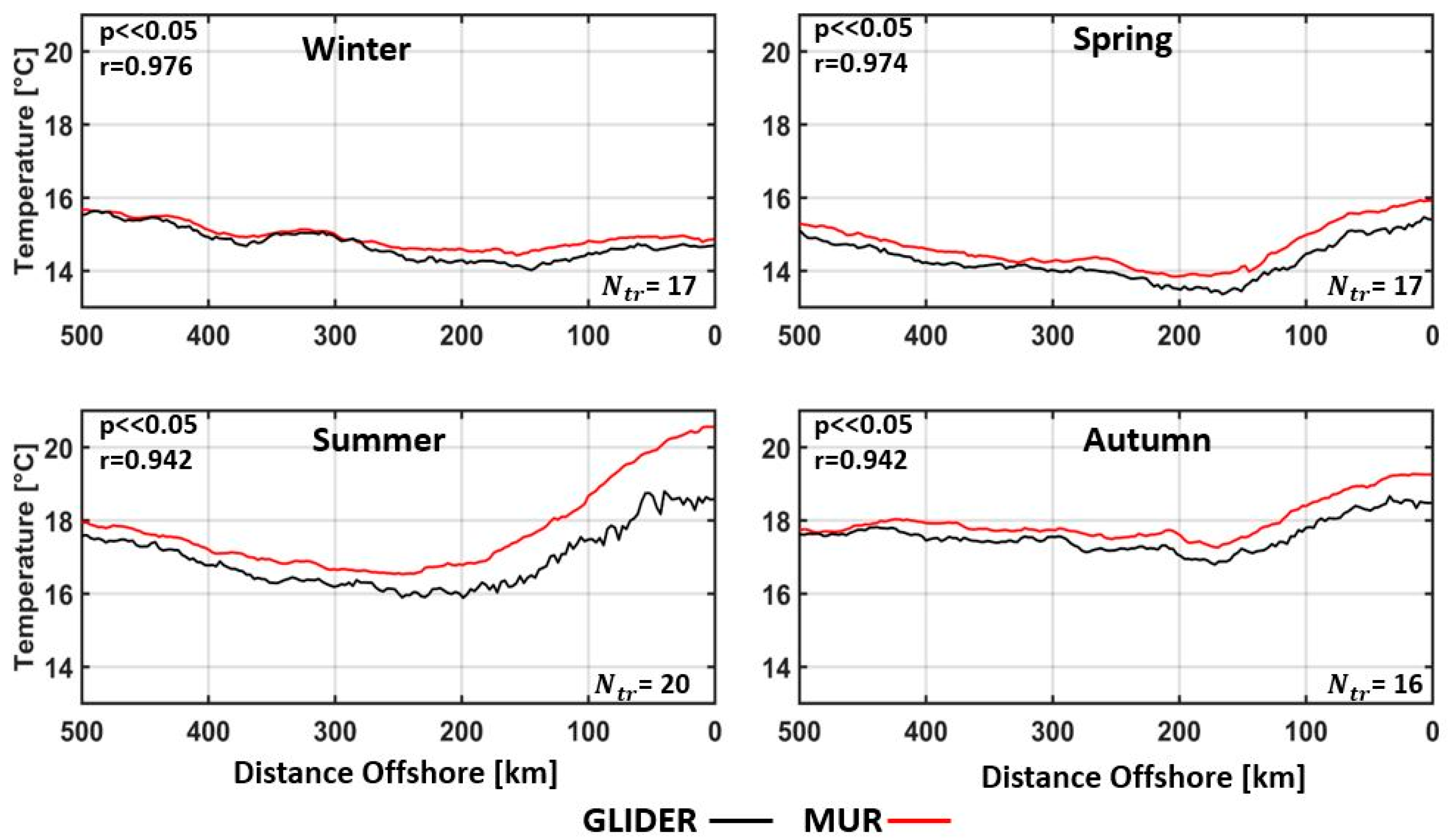
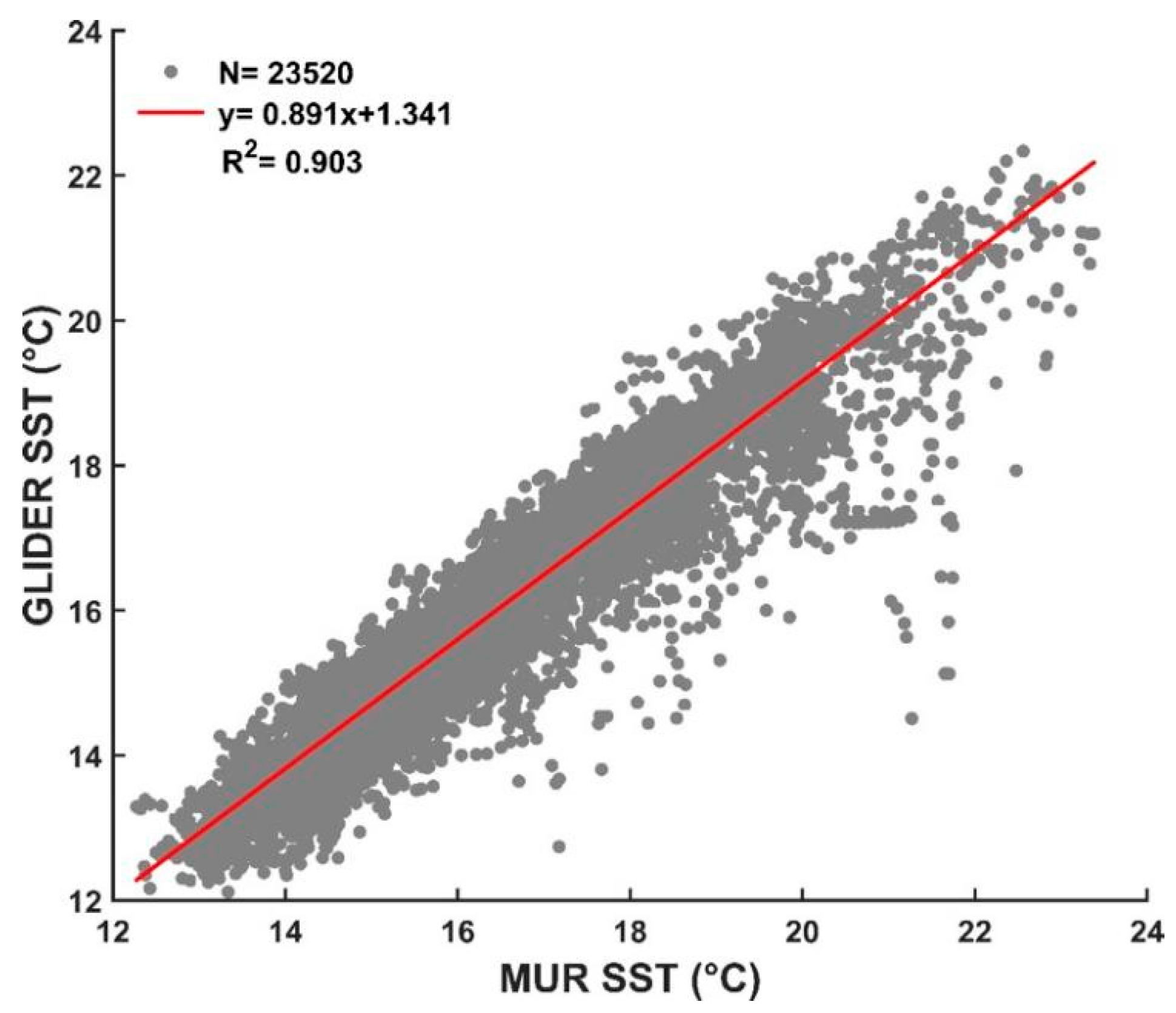
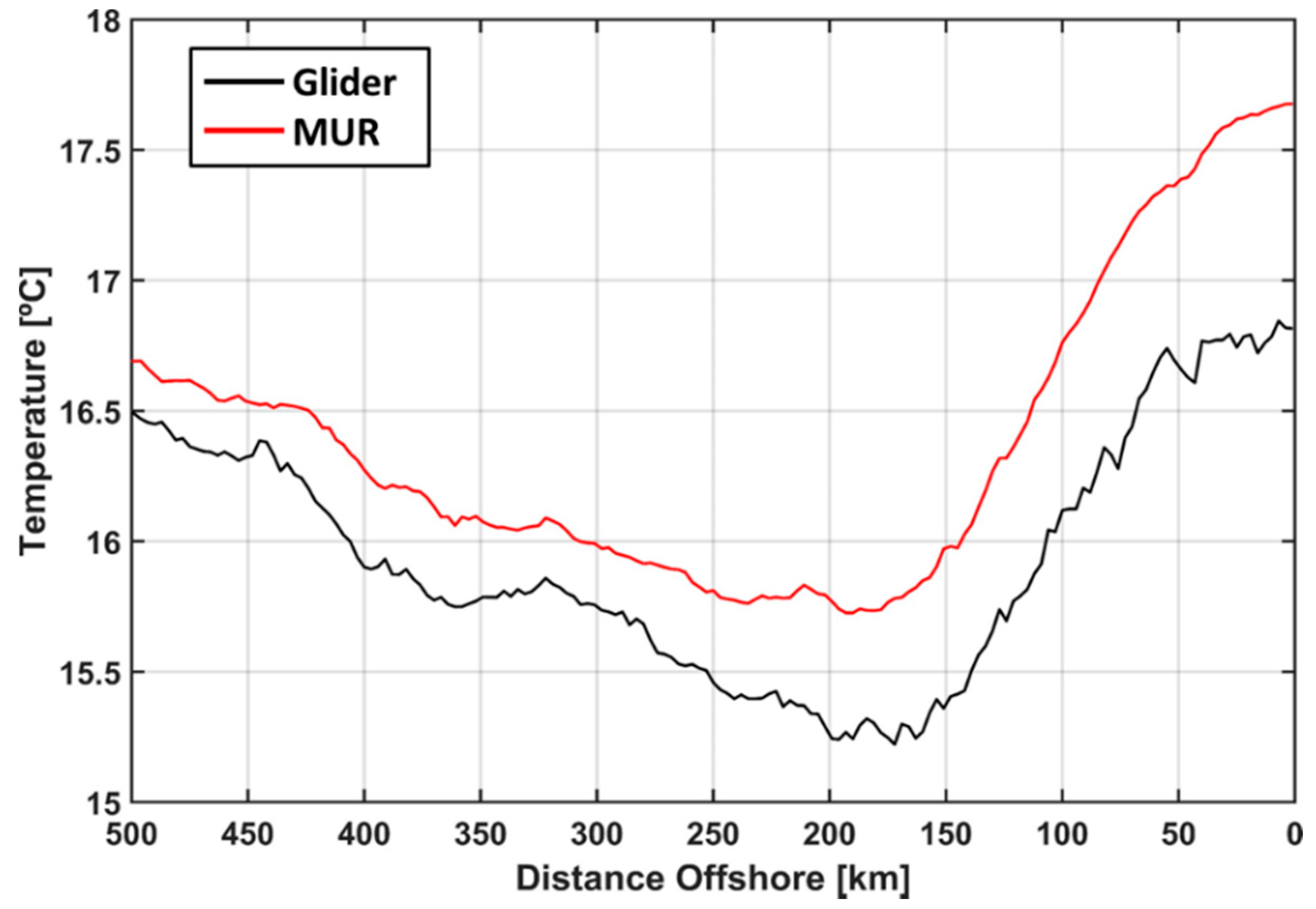
3.1. Similarity between Potential Temperature and SST
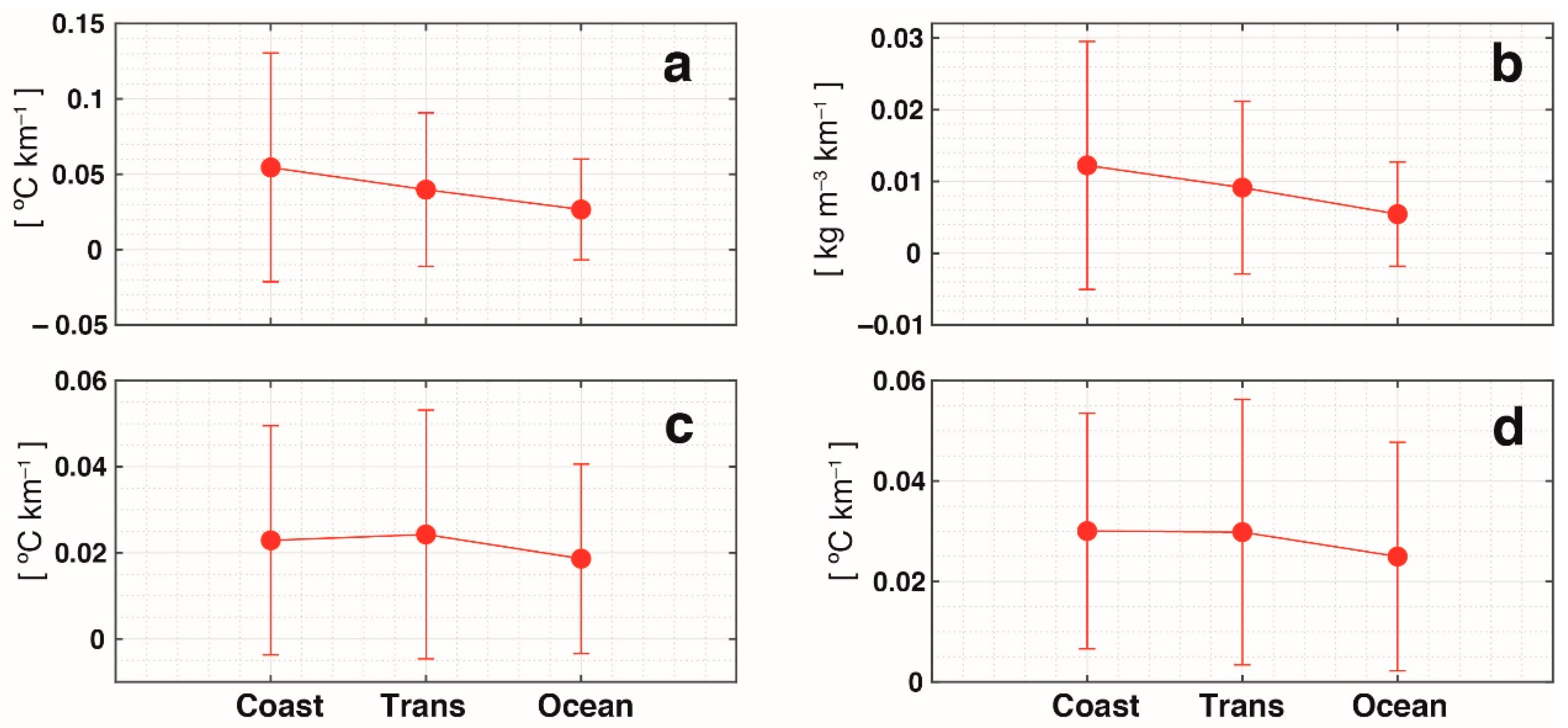
3.2. Temperature Gradients
3.3. Front Detection
4. Discussion
4.1. Interpretation of Front Detection in the CCS
4.2. Differences in Front Detection with CUGN and MUR Datasets
4.2.1. Temperature Sampling Depth
4.2.2. Gradient Computation
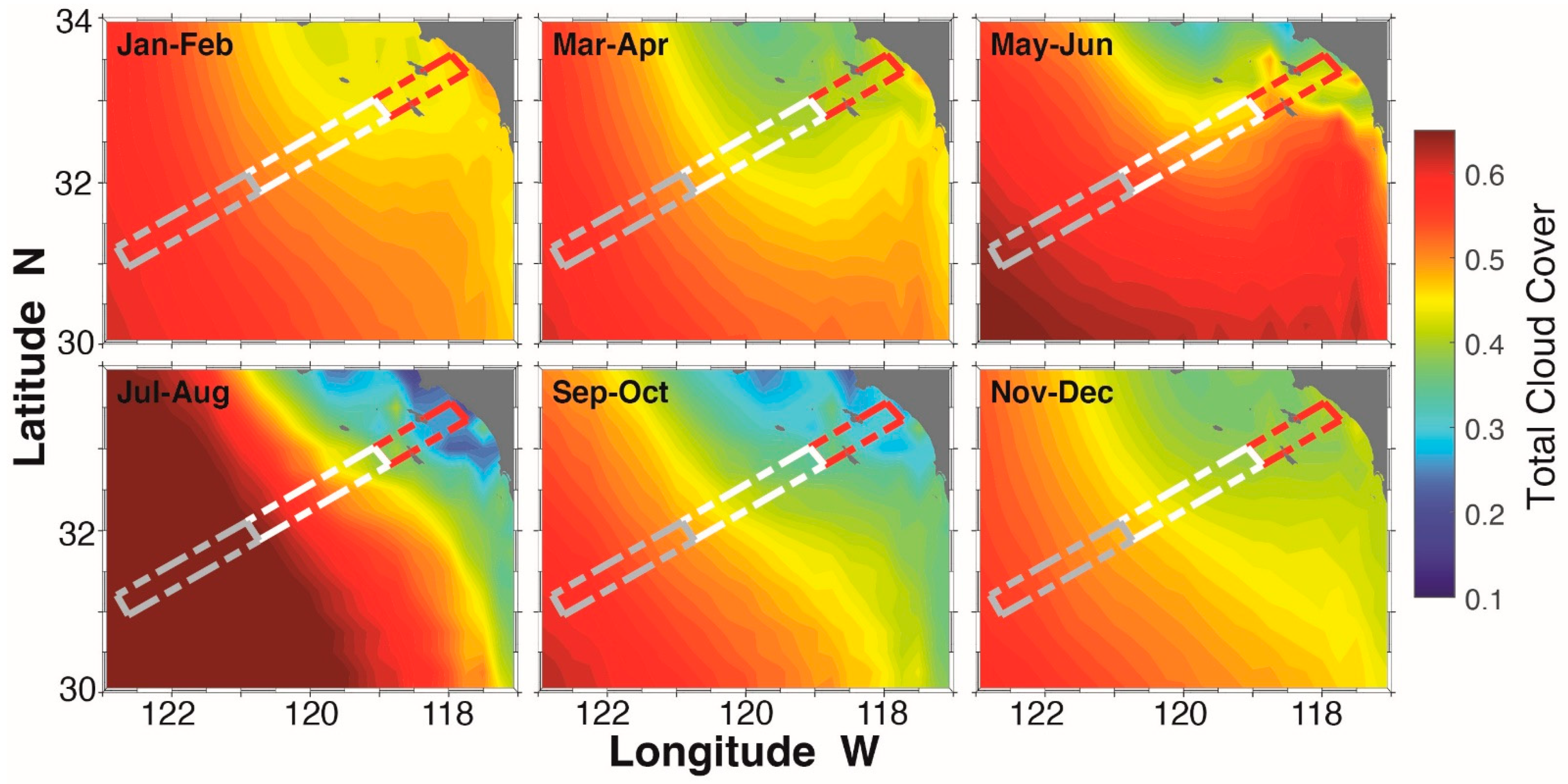
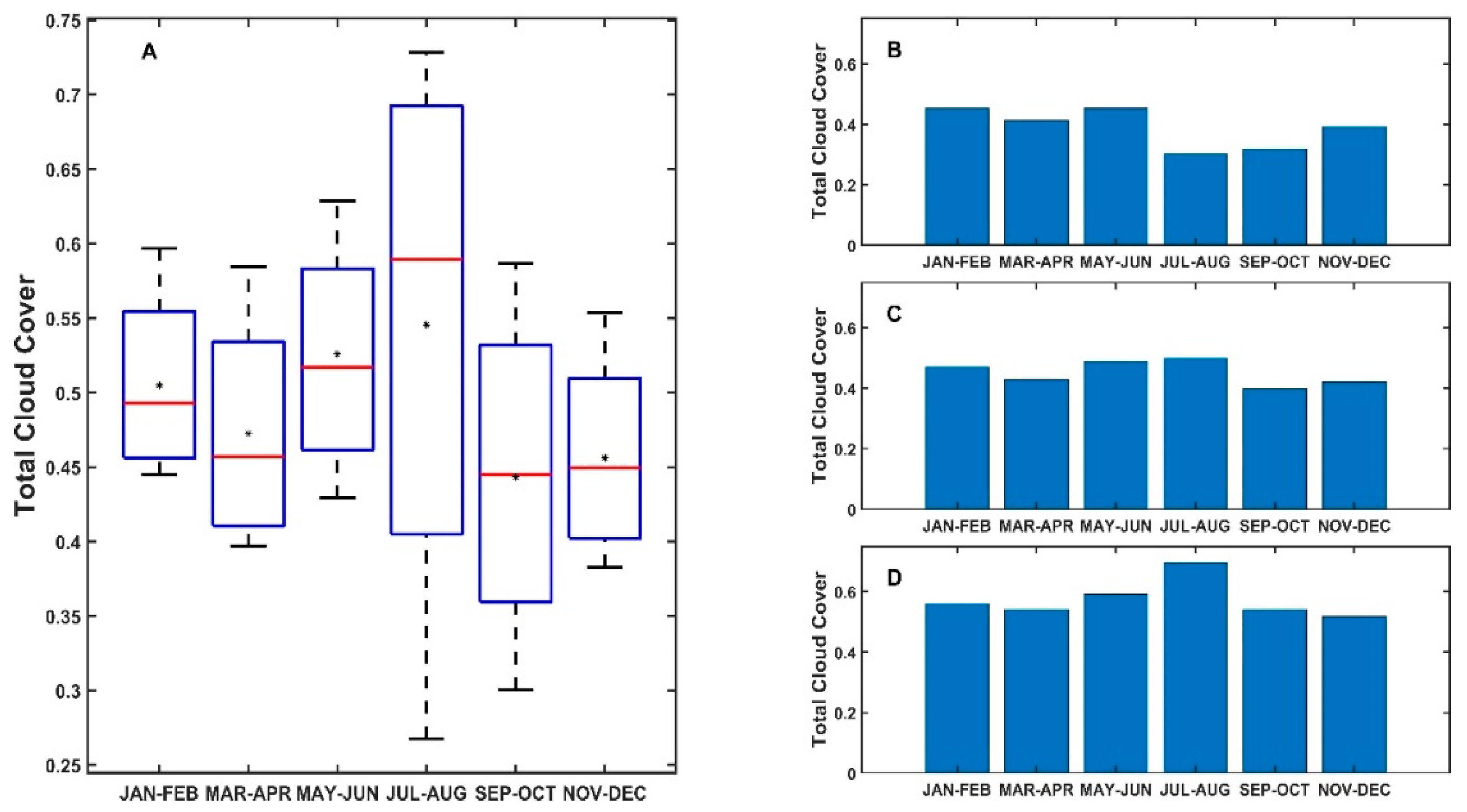
4.2.3. Cloud Cover in MUR Data
4.2.4. Advantages and Disadvantages of Detecting Fronts from MUR and Glider Datasets
4.3. Sensitivity of the Results to the Front Definition
4.4. Differences between Temperature and Density Fronts: Thermohaline Compensation
5. Conclusions
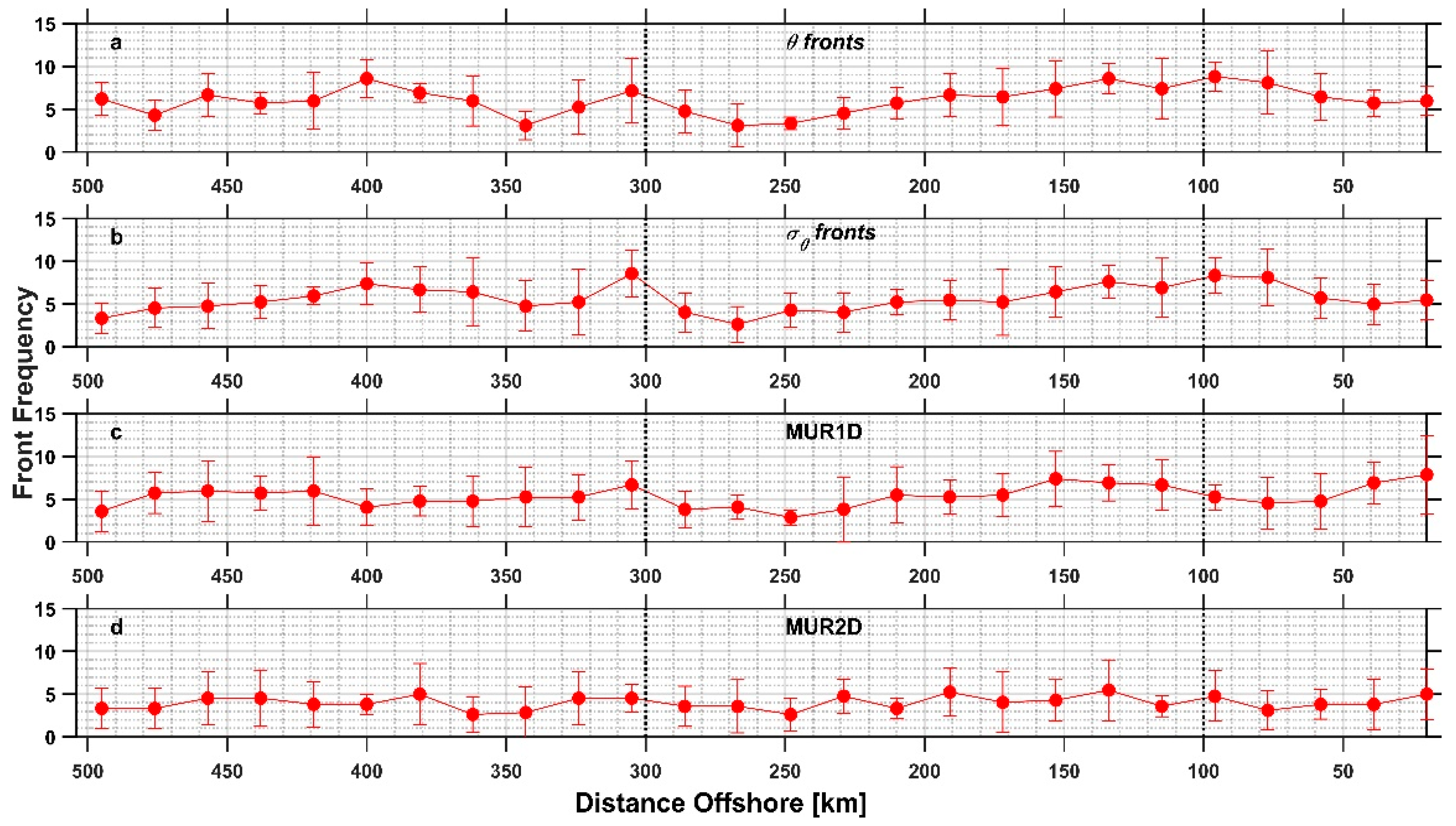
- Front Frequency (and horizontal gradients) increases significantly towards the coastal zone and in summer;
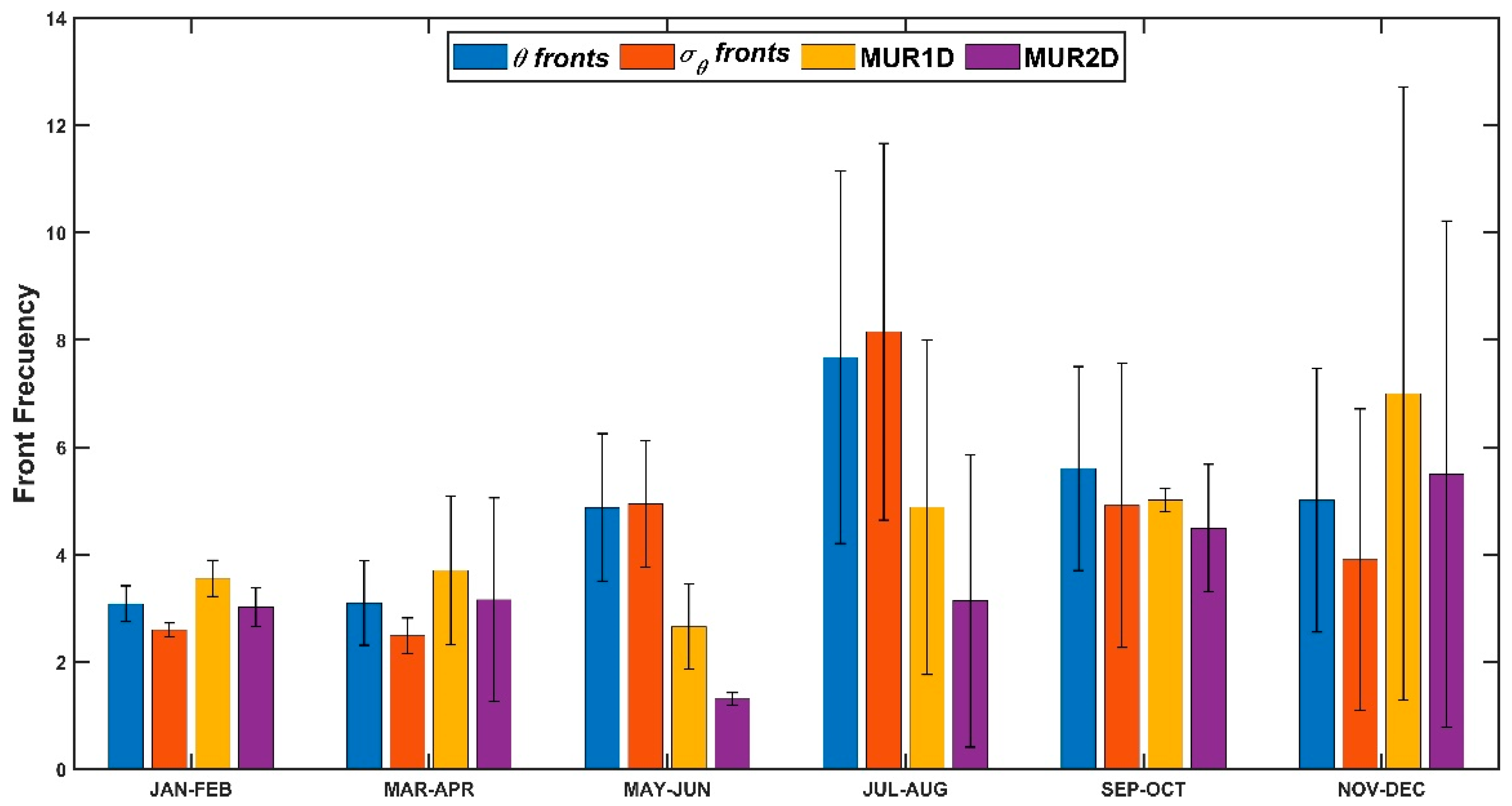
- The bimonthly climatology of FF using CUGN glider data shows a seasonal cycle, i.e., high in July–August and low in January–February, while the MUR dataset shows high FF values in November–December and low in May–June;
- The oceanic zone, distant from the CC core, exhibits the weakest horizontal gradients of the three zones, and thus fewer frontal structures are detected in this area;
- Thermohaline-compensated fronts are more abundant towards the oceanic zone, although most fronts are detected using both temperature or density criteria, indicating that the contribution of temperature to density in this region is the most important thermohaline contribution.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Ullman, D.S.; Cornillon, P.C. Satellite-derived sea surface temperature fronts on the continental shelf off the northeast US coast. J. Geophys. Res. Oceans 1999, 104, 23459–23478. [Google Scholar] [CrossRef]
- Hoskins, B.J. The mathematical theory of frontogenesis. Annu. Rev. Fluid Mech. 1982, 14, 131–151. [Google Scholar] [CrossRef]
- Mcwilliams, J.C.; Molemaker, M.J.; Olafsdottir, E.I. Linear fluctuation growth during frontogenesis. J. Phys. Oceanogr. 2009, 39, 3111–3129. [Google Scholar] [CrossRef] [Green Version]
- McWilliams, J.C.; Molemaker, M.J. Baroclinic frontal arrest: A sequel to unstable frontogenesis. J. Phys. Oceanogr. 2011, 41, 601–619. [Google Scholar] [CrossRef]
- FrankS, P.J. Phytoplankton blooms at fronts: Patterns, scales, and physical forcing mechanisms. Rev. Aquat. Sci. 1992, 6, 121–137. [Google Scholar]
- Franks, P.J.S.; Diego, S. Sink or swim: Accumulation of biomass at fronts. Mar. Ecol. Prog. Ser. Oldend. 1992, 82, 1–12. [Google Scholar] [CrossRef]
- Franks, P.J.S.; Walstad, L.J. Phytoplankton patches at fronts: A model of formation and response to wind events. J. Mar. Res. 1997, 55, 1–29. [Google Scholar] [CrossRef]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Holyer, R.J.; Peckinpaugh, S.H. Edge detection applied to satellite imagery of the oceans. IEEE Trans. Geosci. Remote Sens. 1989, 27, 46–56. [Google Scholar] [CrossRef] [Green Version]
- Oram, J.J.; McWilliams, J.C.; Stolzenbach, K.D. Gradient-based edge detection and feature classification of sea-surface images of the Southern California Bight. Remote Sens. Environ. 2008, 112, 2397–2415. [Google Scholar] [CrossRef]
- Cayula, J.-F.; Cornillon, P. Edge Detection Algorithm for SST Images. J. Atmos. Ocean. Technol. 1992, 9, 67–80. [Google Scholar] [CrossRef]
- Ullman, D.S.; Cornillon, P.C. Evaluation of front detection for satellite-derived SST data using in situ observations. J. Atmos. Ocean. Technol. 2000, 17, 1667–1675. [Google Scholar] [CrossRef]
- Diehl, S.F.; Budd, J.W.; Ullman, D.; Cayula, J.F. Geographic window sizes applied to remote sensing sea surface temperature front detection. J. Atmos. Ocean. Technol. 2002, 19, 1105–1113. [Google Scholar] [CrossRef]
- Taylor, P.; Miller, P. Multi-spectral front maps for automatic detection of ocean colour features from SeaWiFS. Int. J. Remote Sens. 2004, 25, 1437–1442. [Google Scholar] [CrossRef]
- Kahru, M.; Lorenzo, E.D.I.; Manzano-sarabia, M.; Mitchell, B.G.; Di Lorenzo, E.; Manzano-sarabia, M.; Mitchell, B.G. Spatial and temporal statistics of sea surface temperature and chlorophyll fronts in the California Current. J. Plankton Res. 2012, 34, 749–760. [Google Scholar] [CrossRef] [Green Version]
- Nieto, K.; Demarcq, H.; McClatchie, S. Mesoscale frontal structures in the Canary Upwelling System: New front and filament detection algorithms applied to spatial and temporal patterns. Remote Sens. Environ. 2012, 123, 339–346. [Google Scholar] [CrossRef]
- Shimada, T.; Sakaida, F.; Kawamura, H.; Okumura, T. Application of an edge detection method to satellite images for distinguishing sea surface temperature fronts near the Japanese coast. Remote Sens. Environ. 2005, 98, 21–34. [Google Scholar] [CrossRef]
- Castelao, R.M.; Mavor, T.P.; Barth, J.A.; Breaker, L.C. Sea surface temperature fronts in the California Current System from geostationary satellite observations. J. Geophys. Res. 2006, 111, C09026. [Google Scholar] [CrossRef] [Green Version]
- Send, U.; Davis, R.; Fischer, J.; Imawaki, S.; Kessler, W.; Meinen, C.; Owens, B.; Roemmich, D.; Rossby, T.; Rudnick, D.; et al. A global boundary current circulation observing network. Proc. Ocean. 09 Sustain. Ocean Obs. Inf. Soc. 2010, 2. [Google Scholar] [CrossRef] [Green Version]
- Rudnick, D.L.; Zaba, K.D.; Todd, R.E.; Davis, R.E. Progress in Oceanography A climatology of the California Current System from a network of underwater gliders. Prog. Oceanogr. 2017, 154, 64–106. [Google Scholar] [CrossRef]
- Lynn, R.J.; Simpson, J.J. The California Current system: The seasonal variability of its physical characteristics. J. Geophys. Res. 1987, 92, 12947. [Google Scholar] [CrossRef]
- Davis, R.E.; Ohman, M.D.; Rudnick, D.L.; Sherman, J.T.; Hodges, B. Glider surveillance of physics and biology in the southern California Current System. Limnol. Oceanogr. 2008, 53, 2151–2168. [Google Scholar] [CrossRef] [Green Version]
- Mcclatchie, S.; Cowen, R.; Nieto, K.; Greer, A.; Luo, J.Y.; Guigand, C.; Demer, D.; Griffith, D.; Rudnick, D. Resolution of fine biological structure including small narcomedusae across a front in the Southern California Bight. J. Geophys. Res. Ocean. 2012, 117, 1–18. [Google Scholar] [CrossRef]
- Powell, J.R.; Ohman, M.D. Covariability of zooplankton gradients with glider-detected density fronts in the Southern California Current System. Deep. Res. Part II Top. Stud. Oceanogr. 2015, 112, 79–90. [Google Scholar] [CrossRef]
- Todd, R.E.; Rudnick, D.L.; Mazloff, M.R.; Cornuelle, B.D.; Davis, R.E. Thermohaline structure in the California Current System: Observations and modeling of spice variance. J. Geophys. Res. Ocean. 2012, 117, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Todd, R.E.; Rudnick, D.L.; Davis, R.E.; Ohman, M.D. Underwater gliders reveal rapid arrival of El Niño effects off California’s coast. Geophys. Res. Lett. 2011, 38, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Rudnick, D.L. Ocean Research Enabled by Underwater Gliders. Ann. Rev. Mar. Sci. 2016, 8, 519–541. [Google Scholar] [CrossRef]
- Sherman, J.; Davis, R.E.; Owens, W.B.; Valdes, J. The Autonomous Underwater Glider “Spray”. IEEE J. Ocean. Eng. 2001, 26, 437–446. [Google Scholar] [CrossRef] [Green Version]
- Physical Oceanography Distributed Active Archive Center. JPL MUR MEaSUREs Project. 2015. Foundation Sea Surface Temperature Analysis. Ver. 4.1; Physical Oceanography Distributed Active Archive Center: Pasadena, CA, USA, 2015. [CrossRef]
- Saraceno, M.; Provost, C.; Piola, A.R.; Bava, J.; Gagliardini, A. Brazil Malvinas Frontal System as seen from 9 years of advanced very high resolution radiometer data. J. Geophys. Res. C Ocean. 2004, 109, C05027. [Google Scholar] [CrossRef]
- Gautschi, W. Numerical Analysis; Springer Science & Business Media: Boston, MA, USA, 1997; ISBN 978-0-8176-8258-3. [Google Scholar] [CrossRef]
- Rivas, A.L.; Pisoni, J.P. Identification, characteristics and seasonal evolution of surface thermal fronts in the Argentinean Continental Shelf. J. Mar. Syst. 2010, 79, 134–143. [Google Scholar] [CrossRef]
- Ping, B.; Su, F.; Meng, Y.; Fang, S.; Du, Y. A model of sea surface temperature front detection based on a threshold interval. Acta Oceanol. Sin. 2014, 33, 65–71. [Google Scholar] [CrossRef]
- Sobel, I.; Feldman, G. “A 3×3 Isotropic Gradient Operator for Image Processing,” Pattern Classification and Scene Analysis. 1973, pp. 271–272. Available online: https://www.researchgate.net/publication/285159837_A_33_isotropic_gradient_operator_for_image_processing (accessed on 12 November 2021).
- Belkin, I.M.; Reilly, J.E.O. An algorithm for oceanic front detection in chlorophyll and SST satellite imagery. J. Mar. Syst. 2009, 78, 319–326. [Google Scholar] [CrossRef]
- Robinson, I.S. Discovering the Ocean from Space: The Unique Applications of Satellite Oceanography; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010; ISBN 3540683224. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E.; Masters, B.R. Digital Image Processing, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2009; ISBN 978-0-13-168728-8. [Google Scholar]
- Mauzole, Y.L.; Torres, H.S.; Fu, L.L. Patterns and Dynamics of SST Fronts in the California Current System. J. Geophys. Res. Ocean. 2020, 125, e2019JC015499. [Google Scholar] [CrossRef]
- de Boyer Montégut, C.; Madec, G.; Fischer, A.S.; Lazar, A.; Iudicone, D. Mixed layer depth over the global ocean: An examination of profile data and a profile-based climatology. J. Geophys. Res. C Ocean. 2004, 109, 1–20. [Google Scholar] [CrossRef]
- Bakun, A. Fronts and eddies as key structures in the habitat of marine fish larvae: Opportunity, adaptive response. Sci. Mar. 2006, 70, 105–122. [Google Scholar] [CrossRef]
- Breaker, L.C.; Mooers, C.N.K. Oceanic variability off the Central California coast. Prog. Oceanogr. 1986, 17, 61–135. [Google Scholar] [CrossRef]
- Haury, I.R.; Fey, C.L.; McGowan, J.A. The Ensenada front: July 1985. Calif. Coop. Ocean. Fish. Investig. Rep. 1993, 34, 69–88. [Google Scholar]
- Vazquez-Cuervo, J.; Torres, H.S.; Menemenlis, D.; Chin, T.; Armstrong, E.M. Relationship between SST gradients and upwelling off Peru and Chile: Model/satellite data analysis. Int. J. Remote Sens. 2017, 38, 6599–6622. [Google Scholar] [CrossRef]
- Wu, Q.Z.; Cheng, H.Y.; Jeng, B.S. Motion detection via change-point detection for cumulative histograms of ratio images. Pattern Recognit. Lett. 2005, 26, 555–563. [Google Scholar] [CrossRef]
- Ferrari, R.; Paparella, F. Compensation and alignment of thermohaline gradients in the ocean mixed layer. J. Phys. Oceanogr. 2003, 33, 2214–2223. [Google Scholar] [CrossRef] [Green Version]
- Rudnick, D.L.; Martin, J.P. On the horizontal density ratio in the upper ocean. Dyn. Atmos. Ocean. 2002, 36, 3–21. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zone | θ Gradients [°C km−1] | MUR1D [°C km−1] | MUR2D [°C km−1] | σθ Gradients [kg m−3 km−1] |
|---|---|---|---|---|
| Coastal | 0.13 | 0.05 | 0.06 | 0.03 |
| Transition | 0.09 | 0.05 | 0.05 | 0.02 |
| Offshore | 0.06 | 0.04 | 0.04 | 0.01 |
| Zone | Average Compensation | No Compensation [%] | Partial Compensation [%] | Mixed-Layer Depth [m] |
|---|---|---|---|---|
| Coastal | 1.06 | 70 | 30 | 15 |
| Transition | 1.11 | 56 | 44 | 26 |
| Offshore | 1.38 | 39 | 61 | 42 |
| FF/METHODS | COAST | TRANSITION | OCEAN | |||
|---|---|---|---|---|---|---|
| p-Value | p-Value | p-Value | ||||
| θ fronts, σθ fronts, MUR1D and MUR2D | 4.15 | 0.245 | 5.16 | 0.161 | 13.14 | 0.004 * |
| θ fronts and σθ fronts | 0.53 | 0.467 | 0.56 | 0.452 | 0.32 | 0.5702 |
| θ fronts and MUR1D | 0.33 | 0.563 | 0.95 | 0.331 | 1.66 | 0.1974 |
| θ fronts and MUR2D | 3 | 0.083 | 2.98 | 0.084 | 10.1 | 0.001 * |
| σθ fronts and MUR1D | 0.33 | 0.563 | 0.16 | 0.691 | 0.17 | 0.677 |
| σθ fronts and MUR2D | 2.55 | 0.112 | 2.99 | 0.084 | 6.63 | 0.010 * |
| MUR1D and MUR2D | 1.33 | 0.248 | 2.83 | 0.092 | 7.03 | 0.008 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olaya, F.C.; Durazo, R.; Oerder, V.; Pallàs-Sanz, E.; Bento, J.P. Ocean Front Detection with Glider and Satellite-Derived SST Data in the Southern California Current System. Remote Sens. 2021, 13, 5032. https://doi.org/10.3390/rs13245032
Olaya FC, Durazo R, Oerder V, Pallàs-Sanz E, Bento JP. Ocean Front Detection with Glider and Satellite-Derived SST Data in the Southern California Current System. Remote Sensing. 2021; 13(24):5032. https://doi.org/10.3390/rs13245032
Chicago/Turabian StyleOlaya, Frank C., Reginaldo Durazo, Vera Oerder, Enric Pallàs-Sanz, and Joaquim P. Bento. 2021. "Ocean Front Detection with Glider and Satellite-Derived SST Data in the Southern California Current System" Remote Sensing 13, no. 24: 5032. https://doi.org/10.3390/rs13245032
APA StyleOlaya, F. C., Durazo, R., Oerder, V., Pallàs-Sanz, E., & Bento, J. P. (2021). Ocean Front Detection with Glider and Satellite-Derived SST Data in the Southern California Current System. Remote Sensing, 13(24), 5032. https://doi.org/10.3390/rs13245032