Abstract
Canopy temperature (Tc) is used to characterize plant water physiology, and thermal infrared (TIR) remote sensing is a convenient technology for measuring Tc in forest ecosystems. However, the images produced through this method contain background pixels of forest gaps, thereby reducing the accuracy of Tc observations. Extracting Tc data from TIR images is of great significance for understanding changes in ecosystem water status. In this study, a temperature threshold method was developed to rapidly, accurately, and automatically extract forest canopy pixels for Tc data obtention. Specifically, this method takes the temperature corresponding to the point with a slope of 0.5 in the curve composed of the normalized average temperature and the normalized cumulative number of pixels as the segmentation threshold to separate the forest gap pixels from the forest canopy pixels in the TIR images and extract the separated forest canopy pixels based on the pixel coordinates for Tc data obtention. Taking the Tc values, measured using a thermocouple, as the standard, Tc extraction using the new temperature threshold method and traditional methods (the Otsu algorithm and direct extraction) was compared in cork oak plantations. The results showed that the temperature threshold method offered the highest extraction accuracy, followed by the direct extraction method and the Otsu algorithm. The temperature threshold method was determined to be the most suitable for extracting Tc data from the TIR images of cork oak plantations.
1. Introduction
Canopy temperature (Tc) is an important parameter that characterizes plant physiological and ecological processes and energy balances and can accurately reflect a plant’s water status [1,2,3]. In the past few decades, the crop water stress index (CWSI) and the stomatal conductance index (Ig) calculated from Tc have been used to monitor water status and support irrigation scheduling for crops and economically important forests [4,5,6,7]. Under global climate change, arid and semi-arid regions are facing increasingly serious risks from water shortages [8], and the balance of forest ecosystems, in particular, is threatened [9,10]. Long-term positioning observations of forest ecosystems’ Tcs are helpful for the timely and accurate monitoring of ecosystem drought stress. These observations are also helpful for analyzing the impact of climate change on ecosystem functions. Such data are important for the sustainable development of forest ecosystems.
Thermocouples have the advantage of being highly accurate when used in temperature measurements. However, in field observations, it is very challenging to use thermocouples to continuously observe leaf temperatures, as thermocouples are difficult to install in tree canopies and frequently detach from leaves [11]. Thermal infrared (TIR) imaging is a powerful tool for Tc research [12]. TIR usually uses detectors that are sensitive to longwave radiation of 7–14 μm and combines physical algorithms to convert the measured longwave radiation exitance into kinetic temperatures. Compared with single leaf scales measured by thermocouples, TIR imaging can integrate regional temperature information into a map, which facilitates long-term positioning and continuous monitoring of forest ecosystem Tc values at relatively high spatial and temporal resolutions [13]. However, in practical applications, the field of view of the detector includes forest gaps. If the direct extraction method is adopted, the temperature of all pixels in the image, or pixels representing part of the canopy, can be obtained, which will reduce the accuracy of Tc observations [14,15,16].
To acquire pure Tc data, canopy pixels in an image need to be extracted. There are two types of commonly used methods for extracting canopy pixels: a threshold-based method and a co-registration method [17,18]. The co-registration method uses other higher-resolution imagery (e.g., red–green–blue (RGB) and multispectral imagery) to mask the pixels of non-canopy features, such as soil, and then fuse them with TIR imagery to achieve canopy pixel extraction [17,18]. For example, Poblete, et al. [19] proposed a vineyard canopy pixel extraction method based on the fusion of multispectral and TIR imagery. Zhang et al. [18] extracted the canopy pixels of corn via the fusion of RGB and TIR imagery. This method offers a high accuracy level but requires additional equipment to obtain reference images, which is more expensive. In addition, this method needs to resample high-resolution imagery to match the resolution of the TIR imagery, which is cumbersome [20,21]. The threshold-based method, however, requires TIR imagery only. This kind of method takes the threshold as the segmentation threshold to separate the background pixels from the target pixels in the TIR imagery, thereby extracting the canopy pixels. The segmentation threshold can be obtained by use of either visual interpretation, the edge detection algorithm, the Otsu algorithm, or other similar methods [17,18]. Among them, visual interpretation is the most reliable method for determining the segmentation threshold [22]. For example, Räsänen et al. [23] used a visual interpretation method to test the effects of image segmentation. However, this method is time consuming and labor intensive. In the edge detection algorithm, the points with sharp changes in the gray-level are determined by the first or second derivative of the image and empirical segmentation threshold; these points are connected to form an edge to achieve segmentation of the target pixels and background pixels in the image [24]. For example, Zhang et al. [21] used the Canny edge detection algorithm to extract canopy pixels. However, this method is sensitive to background noise, especially in low-resolution TIR images, which may lead to unacceptable over-segmentation [22]. In addition, in order to extract the canopy pixels, this method needs requires image processing operations such as reclassification, feature to polygon, and clipping on the obtained edge feature’s raster image, which is complicated [21,25]. The Otsu algorithm divides the image into target pixels and background pixels by setting a gray-level value. The gap between the variance of two types of pixels changes as the gray-level value, when the gap is the largest, the gray-level value is regarded as the segmentation threshold [26]. For example, Ludovisi et al. [27] used Otsu algorithms to extract Tc data for black poplar. Compared with the co-registration, visual interpretation, and edge detection algorithm methods, the Otsu algorithm has the advantages of being easy to operate, inexpensive, and automated in terms of processing. This algorithm is thus more suitable for the batch processing of large numbers of TIR images generated from long-term positioning observations. However, when the gray-level difference between the target pixels and part of background pixels is not significant, such as in sunlit canopies and shaded soils, this method classifies the shaded soil as the target pixels, resulting in an inaccurate segmentation threshold and missing segmentation [21]. Therefore, it is necessary to develop a simple and accurate method for extracting canopy pixels to obtain Tc data in plantation ecosystems.
In this study, we developed a new threshold-based method (the temperature threshold method) for extracting canopy temperatures from TIR images based on the principle of the Otsu algorithm and combined with the advantages of visual interpretation, the edge detection algorithm. The specific objectives of this study were (1) to find the segmentation point between the forest canopy and forest gap pixels in the TIR imagery in order to establish the temperature threshold method and (2) to clarify the applicability of the temperature threshold method by comparing the performance of this method with that of the Otsu algorithm and the direct extraction method in Tc extraction.
2. Materials and Methods
2.1. Overview of the Study Area
This study was carried out at the Yellow River Xiaolangdi Forest Ecosystem Positioning Research Station, China, which is associated with the Chinese State Forestry Administration (35°01’ N, 112°28’ E, average altitude: 410 m) (Figure 1). The station is located in Jiyuan City, Henan Province, in the middle reaches of the Yellow River. The study site has a warm temperate continental monsoon climate, and the mean annual air temperature is 12.4–14.3 °C. Annual rainfall in the area is 641.7 mm, and an estimated 68.3% of the total precipitation falls in summer. The soil layer is mainly composed of brown loam and is approximately 60 cm deep. The main tree species in the study area are cork oak (Quercus variabilis), arborvitae (Platycladus orientalis), and locust (Robinia pseudoacacia), with cork oak accounting for more than 80% of the forest area. The plantation forest’s age is 47 years [28]. The growing season in cork oak plantations begins in March and ends in mid-November. The canopy closes at the end of May and remains stable from June to September. We conducted our research during this latter period.
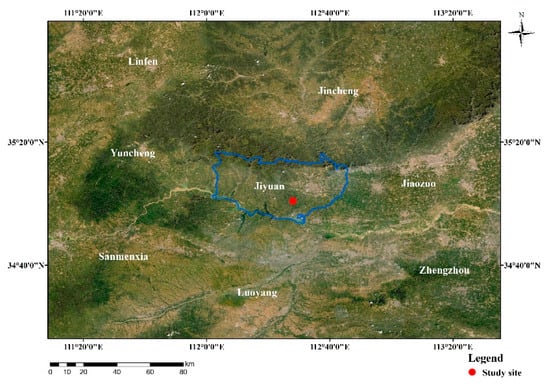
Figure 1.
Location of the experimental site.
2.2. Acquisition of TIR Images
A thermal camera (FLIR A310F, FLIR Inc., Wilsonville, OR, USA) was used to automatically capture TIR images from the cork oak plantation. The pixel resolution of this camera is 360 × 240, and each pixel corresponds to an effective temperature reading. A FLIR IR 18 mm lens (field of view: 25° × 18.8°) was used for image collection. This camera uses an uncooled microbolometer to detect longwave radiation between 7.5 and 13 μm and can operate at ambient temperatures of −25–50 °C.
The nominal camera accuracy is reported as ±2 °C or ±2% of the reading. These errors are due to the fixed parameters (e.g., emissivity, atmospheric temperatures, relative humidity, and reflected apparent temperature) and calibrating processes in the camera and software (FLIR Tools, FLIR Inc., Wilsonville, OR, USA). In order to improve the accuracy of the TIR temperature measured, we set the emissivity to 0.96. Additionally, through real-time monitoring, we input the above remaining parameters required for each image in FLIR Tools to reduce observation errors.
The camera was housed in a FILR F-series waterproof enclosure to protect it from ambient moisture and precipitation and installed on the tower’s base platform 10 m above the canopy. The camera faced southeast and was mounted at a sensor zenith angle of 45° to avoid the effects of hot spots. The camera automatically collected TIR images of the cork oak plantation from July to September of 2020. Measurements were carried out between 9:00 and 17:00, and one image was captured every hour. A wireless transmission device was used at the base of the tower to connect the camera to a personal computer and send the collected images to the computer.
The temperature corresponding to each pixel in the TIR imagery was obtained by importing the collected TIR images into the FLIR Tools software. At the same time, all pixel temperatures in the TIR imagery were exported to an Excel spreadsheet (Microsoft Office 2016, Microsoft Corporation, Redmond, WA, USA) using the FLIR Tools software.
2.3. Thermocouple Temperature Observation
As it is difficult to securely fix a thermocouple (Yaxin-0233, Yaxin Inc., Beijing, China) on the top leaf of a tree for an extended period of time, we attached a thermocouple to a bamboo pole that protruded from the middle of the tower to monitor the temperature of the canopy of the target tree. The temperature measurement range of the thermocouple was −50–100 °C, the temperature measurement accuracy was 0.1 °C, and the temperature response time was 200 ms. For comparison with the temperatures obtained from the TIR images, 20 leaves on the tops of the three tree canopies were measured, and the observation period was 9:00–17:00 on the following dates: 23 July; 9 and 10 August; and 1, 3, 7 and 19 September (2020). The measurement interval was synchronized with a thermal camera.
2.4. Data Processing
2.4.1. Determining the Temperature Segmentation Threshold Using Visual Interpretation
TIR images of the plantation were imported into the FLIR Tools software. The “alarm” mode in the software’s palette was then selected, and the temperature segmentation threshold of the forest gap and forest canopy was determined by visual interpretation.
2.4.2. Calculation of the Tc Using the Direct Extraction Method
TIR images of the plantation were imported into the FLIR Tools software. The box selection tool in the software was used to select whole TIR images, and the average temperature of the selected area was deemed as the Tc value obtained by the direct extraction method.
2.4.3. Calculation of the Tc Using the Otsu Algorithm
The Otsu algorithm is a classical threshold algorithm for gray image threshold segmentation and is widely used in the field of image processing. The Otsu algorithm employs the gray-level variance between different types of pixels as the segmentation standard. The larger the variance is between classes, the greater the difference is between the two substances. In this way, segmentation of the background and target pixels in TIR imagery can be realized [26]. The core theoretical formula of the algorithm is
where is the probability of occurrence of the target pixels, is the probability of occurrence of the background pixels, is the average gray value of the target pixels, is the average gray value of the background pixels, and is the mean gray value of the TIR image.
The specific operation of this method in the present study was as follows: First, all of the temperatures of the pixels (Tpixel) in an image were exported to an Excel spreadsheet using the FLIR Tools software. Then, using the MATLAB (Matlab R2018a, The Mathworks Inc., Matick, MA, USA) software, the TIR imagery was converted into gray imagery. The gray imagery was converted into binary imagery based on the segmentation threshold of the forest gap pixels and the forest canopy pixels obtained by the graythresh command in the software. Finally, the find function was used to find the coordinates of the canopy pixels in the binary imagery, and the temperature values of the corresponding coordinates were located in the Excel spreadsheet. The average canopy pixel temperature of an image was deemed to be the Tc value obtained using the Otsu algorithm. In our research, the Otsu algorithm and direct extraction method were used as the control groups.
2.4.4. Calculation of Tc Using the Temperature Threshold Method
The specific principle regarding the operation of the new method is as follows: The Tpixel values in an image are arranged from low to high, each temperature value is set as a temperature gradient, and each temperature gradient is averaged (the average temperature of all pixels (Taverage) whose temperature is below the temperature gradient and each temperature gradient correspond to a Taverage value). According to the principle of the Otsu algorithm, the degree of temperature variation is different between the target pixels and background pixels in an image. Thus, with an increase in the temperature gradient, the Taverage change rate of the target pixels and background pixels will be different. Then, this method uses the cumulative number of pixels (CNOP; the sum of all pixels whose temperatures are below the temperature gradient, where each temperature gradient corresponds to a CNOP value), instead of the temperature gradient, and assumes that the curve composed of the Taverage and the CNOP have an obvious transition point. If this assumption is true, then the transition point is the segmentation point between the target and background pixels in the image. Based on the principle of the edge detection algorithm, the position of the transition point can then be determined by the feature point in the first derivative of the curve. At the same time, to prevent missing segmentation caused by the incorrect classification of some pixels, it is necessary to further correct the position of the feature point in the curve through visual interpretation.
After finding the position of the segmentation point in the curve, the corresponding Taverage can be determined. The Taverage is then converted into the Tpixel value in the image, and this Tpixel is selected as the temperature segmentation threshold. Finally, the coordinates can be determined for the canopy pixels whose temperatures are higher than the segmentation threshold, and the temperature values of the corresponding coordinates can be located in the Excel spreadsheet. The average canopy pixel temperature of an image was deemed to be the Tc value obtained using the temperature threshold method (the code for MATLAB that describes this procedure is given in Appendix A).
2.4.5. Accuracy Evaluation
The coefficient of determination (R2), total relative error (TRE), root mean square error (RMSE), and mean absolute error (MAE) were used to evaluate the accuracy of different Tc extraction methods. These terms are calculated as follows:
where is the Tc value obtained by different extraction methods, is the Tc value observed by the thermocouple, and and are the respective mean values. When the R2 is close to 1 and the RS, RMSE, and MAE are close to 0, the method is more effective in extracting Tc.
3. Results
3.1. Temperature Threshold Method
3.1.1. Variation Characteristics of the Taverage with the CNOP
A TIR image was randomly selected (obtained at 12:00 on 1 September), as shown in Figure 2. The TIR imagery of the cork oak plantation was mainly composed of three parts: the sunlit canopy (target pixels), the shaded canopy (target pixels), and the forest gap (background pixels). In the TIR imagery, the bright yellow pixels represent the sunlit canopy, the light blue and light yellow pixels represent the shaded canopy, and the dark blue and black pixels represent the forest gap (Figure 2). The left side of the TIR imagery provides the parameter set by the thermal camera to correct the temperature measurement accuracy. The bottom bar represents the Tpixel scale. According to the Tpixel scale, the sunlit canopy temperature was the highest, followed by the shaded canopy, and, lastly, the forest gap.
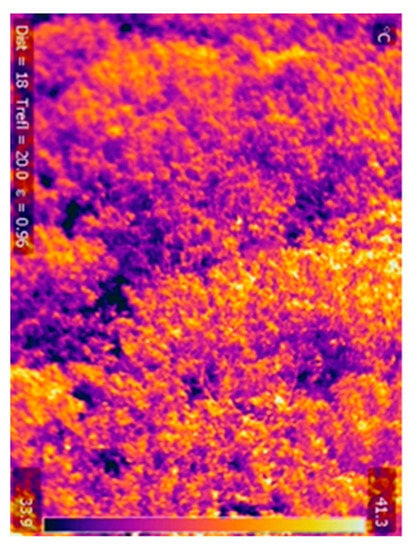
Figure 2.
TIR image of a cork oak plantation shot at 12:00 on 1 September using FLIR A310F (the yellow and light blue pixels represent the forest canopy; the dark blue and black pixels represent the forest gap; The bottom bar represents the temperatures of the pixels (Tpixel) scale).
The temperature segmentation threshold of the above TIR imagery was determined using the visual interpretation method. Then, the forest gap and forest canopy were taken as two separate parts, and the Taverage and CNOP of the two types of pixels were calculated. In the forest gap, when the number of counted pixels increased by 1%, the corresponding Taverage increased by 0.1960 °C. However, in the forest canopy, when the number of counted pixels increased by 1%, the corresponding Taverage only increased by 0.02315 °C. The rate of change of the Taverage with the CNOP in the forest gap was much higher than that of the forest canopy. It was also confirmed that with an increase in the temperature gradient, there was a significant difference in the Taverage change rate between the forest gap pixels and the forest canopy pixels.
To further observe the change rate between the Taverage and the CNOP in the different types of pixels, the above two variables were plotted, as shown in Figure 3. Within the red lines, this figure shows the distribution of the above two variables in the forest gap. Outside the red lines, the figure shows the distribution of the above two variables in the forest canopy. The slopes of the two variables inside the red lines are much larger than those outside the red lines, which is consistent with the above statistical results. That is, with a gradual increase in the CNOP, the Taverage first increases rapidly and then increases more slowly, while the change rate of the Taverage first decreases rapidly and then becomes relatively stable. The same number of pixel changes led to different Taverage change rates. These differences were clearly due to the transition of the counted pixels from the forest gap to the forest canopy and also confirmed our hypothesis that there would be an obvious transition point in the curve composed of the Taverage and CNOP.
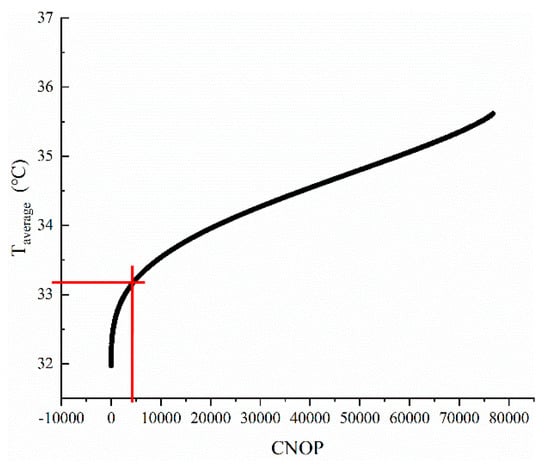
Figure 3.
The curve of the average temperature (Taverage) with the cumulative number of pixels (CNOP) in a TIR image. The red line represents the boundary between the forest gap pixels and forest canopy pixels. The area within the red lines represents the change of Taverage with the CNOP in the forest gap. The area outside the red lines represents the change of Taverage with the CNOP in the forest canopy.
3.1.2. Determination of the Segmentation Threshold
To find the transition point from the forest gap to the forest canopy in the curve, the temperature segmentation threshold of randomly selected TIR images (n = 307) was determined using the visual interpretation method. In addition, the Taverage and CNOP of these TIR images were calculated and normalized, respectively, and the curve composed of the above two variables was fitted. To fit the curve with the logistic equation, the normalized Taverage was assigned to the X axis, and the normalized CNOP was assigned to the Y axis.
On a logistic curve, the point with a slope of 1 is the feature point where the beginning of growth becomes acceleration [29]. However, in order to avoid the occurrence of missing segmentation, the position of the feature point in the curve needs to be corrected. Therefore, the Taverage values corresponding to different slopes (0.1–3.0) in the curve were calculated and converted into the Tpixel in the image (the specific conversion process can be seen in the code in Appendix A). These values were then compared with the temperature segmentation threshold obtained using the visual interpretation method. We found that the Tpixel corresponding to the slope of 0.5 in the curve was the most consistent with the temperature segmentation threshold determined by the visual interpretation method (Table 1). The RMSE and MAE values comparing the Tpixel and the temperature segmentation threshold were the lowest, at 0.2314 and 0.1800, respectively. The SLOPE (1.0012) and R2 (0.9938) were the closest to 1, and the TRE (−0.1412) was the closest to 0. However, when the slope in the curve was less than or greater than 0.5, the Tpixel deviated from the temperature segmentation threshold. In addition, as the slope deviation increased, the temperature deviation also increased. This result showed that the point with a slope of 0.5 was the transition point in the curve where the forest gap turned into the forest canopy. The Tpixel corresponding to this point was deemed to be the segmentation threshold of the forest gap pixels and the forest canopy pixels in the image.

Table 1.
A summary of the root mean square error (RMSE), coefficient of determination (R2), total relative error (TRE), mean absolute error (MAE), and SLOPE values calculated to compare the temperature segmentation thresholds determined using the visual interpretation method versus the temperature threshold method applied different slopes (307 thermal infrared (TIR) images were used for this analysis).
We also fit the curve of the selected image in Section 3.1.1. The fitting equation was y = 1.1794 ÷ (1 + 140.1726 × exp(−6.6621x)) (R2 = 0.9996). In addition, we converted the Taverage corresponding to the point where the first derivative of the fitting equation was 0.5 into the Tpixel value in the image. This converted value was used as the temperature segmentation threshold for processing the TIR images of the plantation (the code for MATLAB that describes this procedure is given in Appendix A). It was found that the extraction of canopy pixels can be achieved using this method. The extraction effect is shown in Figure 4.
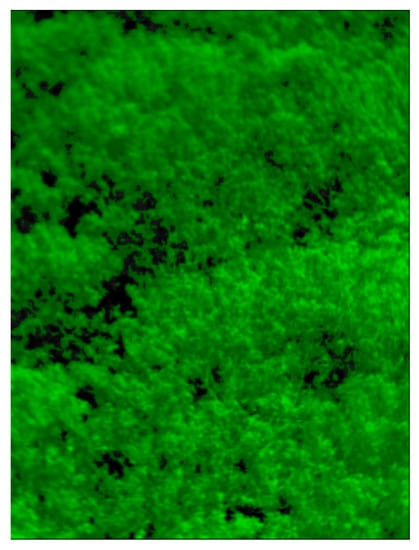
Figure 4.
The image segmented by the temperature threshold method (the green pixels represent the forest canopy; the black pixels represent forest gaps).
3.2. Comparing the Performance of the Temperature Threshold Method, the Otsu Algorithm, and the Direct Extraction Method in Relation to Tc Extraction
To evaluate the effects of different methods in forest canopy pixel extraction, the images processed by the Otsu algorithm (Figure 5), the temperature threshold method (Figure 4), and the direct extraction method (Figure 2) were compared and the differences in canopy temperature were analyzed. As the TIR imagery contained forest gap pixels, the effectiveness of extracting canopy pixels via the direct extraction method was low. The sunlit canopy pixels (green pixels) were well segmented using the Otsu algorithm, but the segmentation effectiveness of the shaded canopy pixels was low. Missing segmentation occurred when using this method. However, the temperature threshold method was the most effective at extracting shaded and sunlit canopy pixels. These findings show that extracting canopy pixels from TIR imagery using the temperature threshold method ensures more accurate results than the previous two methods.
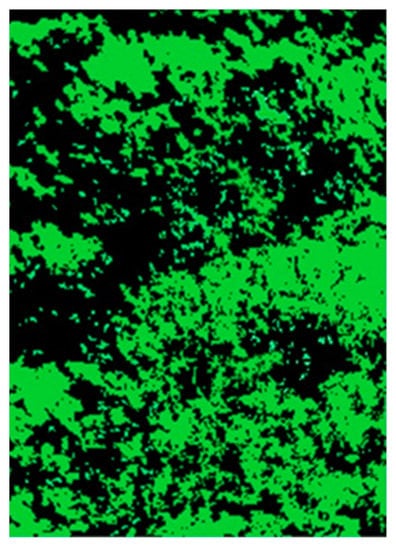
Figure 5.
An image segmented using the Otsu algorithm (the green pixels represent the forest canopy; the black pixels represent the forest gap).
To evaluate the accuracy of the three extraction methods in terms of Tc extraction, the R2, TRE, RMSE, MAE, and SLOPE values were calculated based on the comparison between Tc values obtained using the thermocouple and those obtained using the above three methods (Table 2). According to the SLOPE, we can find that the Tc extracted using the Otsu algorithm was the highest, followed by the temperature threshold method and the direct extraction method. Among them, the Tc values extracted using the temperature threshold algorithm were the most consistent with the Tc values measured using the thermocouple, i.e., the R2 was the highest of all methods, reaching 0.9323, and the TRE, RMSE, and MAE were the lowest of all methods, at 0.6131, 0.7688, and 0.5157, respectively. However, the accuracies of the Tc values extracted using the Otsu algorithm were the lowest of all methods; the R2 was 0.8521, and the TRE, RMSE, and MAE were the highest of all methods, at −2.5183, 1.1330, and 0.9616, respectively. The extraction accuracy of the direct extraction method was midway between that of the other two methods.
Table 2.
The R2, TRE, RMSE, MAE, and SLOPE values were calculated to compare the canopy temperature (Tc) values obtained using the thermocouple with those obtained using the three extraction methods (the temperature threshold method, the Otsu algorithm, and the direct extraction method). ** represents p < 0.01.
Comparisons between the Tc values obtained using the temperature threshold method, the Otsu algorithm, and the direct extraction method are provided in Figure 6. The difference between the Tc values obtained using the temperature threshold method and the Otsu algorithm was less than zero and decreased with increases in the actual temperature (Figure 6a). However, the difference between the Tc values obtained using the temperature threshold method and the direct extraction method was greater than zero and increased with increases in the actual temperature (Figure 6b). This result shows that, during the processing of the TIR images, the forest gap pixels were eliminated when using the temperature threshold method. In addition, no serious missing segmentation phenomenon was observed. Thus, the Tc values obtained using the temperature threshold method were closer to the actual Tc.
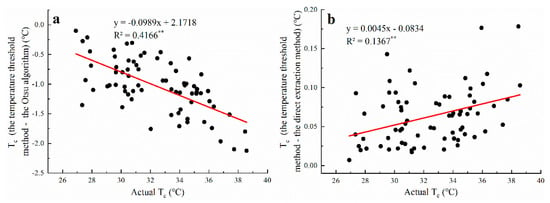
Figure 6.
Differences between Tc values extracted using the temperature threshold method, the Otsu algorithm, and the direct extraction method. The left panel (a) shows the differences in Tc extracted using the temperature threshold method versus the Otsu algorithm. The right panel (b) shows differences in the Tc extracted using the temperature threshold method versus the direct extraction method. The red straight line is linear regression. The equation and R2 represent the fitting equation and the coefficient of determination of the linear regression, respectively. ** represents p < 0.01.
4. Discussion
In this study, a new method for the automatic extraction of Tc from TIR images was developed. In this new method, the Tpixel corresponding to the point with a slope of 0.5 in the curve, which is composed of the normalized Taverage and CNOP, is considered the segmentation threshold. This segmentation threshold can accurately distinguish the forest gap pixels from forest canopy pixels. In addition, the extraction accuracy of this method was found to be similar to that reported by Zhang, et al. [18] (Table 2), who extracted Tc values through the co-registration of TIR and RGB imagery. This new method is suitable for batch processing large numbers of TIR images generated from long-term positioning observations.
The accurate separation of target and background pixels is key to extracting Tc values [17,25,30]. Essentially, TIR imagery provides monochrome images that characterize the temperature of the measured object and can be converted into gray imagery. The gray- level is positively correlated with temperature [20]. At present, most image segmentation methods determine the segmentation threshold according to changes in gray levels in an image. For example, the Otsu algorithm determines the segmentation threshold based on the gray-level variance between the target and background pixels [26]. In addition, the edge detection algorithm determines the segmented edge based on sharp changes in the gray level [24]. However, the original TIR imagery contains information such as the temperature scale and nameplate, which hinders direct conversion from TIR imagery to gray imagery. The temperature data for each pixel can be obtained from the TIR imagery. Based on the linear relationship between temperature and gray level, the temperature interpolation method can be used to convert TIR imagery into gray imagery. However, some errors remain in the gray values obtained using this linear relationship, which will affect the accuracy of the gray segmentation threshold of an image. Therefore, the present study used temperature variables that can be directly obtained from the image to segment the TIR imagery.
In our study, we regarded the forest gap and the forest canopy as two independent parts and found that the change rate of the Taverage with the CNOP in the forest gap was much faster than that in the forest canopy. As the CNOP increased, the Taverage also increased, but the rate of change of the Taverage decreased rapidly at first and then became relatively stable (Figure 3). These results occurred because the degree of temperature variation between the target pixels and background pixels in the image was different. Under the same pixel number, the temperature variations of the forest gap pixels were greater than those of the forest canopy pixels. Moreover, the pixels associated with relatively stable average temperature variations were regarded as the same type of pixels (forest canopy pixels). On the other hand, if the TIR image contained sunlit soil pixels, we assumed that the Taverage change rate in the curve would continue to rise rapidly because the temperature of the soil pixels was high, and the degree of temperature variation was large. Therefore, a small number of soil pixels was able to yield a large change in the Taverage. These ideas should be verified with further research.
The Otsu algorithm is a classic method for extracting canopy pixels based on the threshold method. However, the accuracy of the Tc values extracted using the Otsu algorithm was found to be lower than that for values obtained using the temperature threshold method. This is because the Otsu algorithm divides the image into two categories: the background and the target based on the gray-level variance of the image pixels. However, the TIR imagery of the cork oak plantation consists of three major categories: sunlit canopy, shaded canopy, and forest gap. The temperature difference between the sunlit canopy and the forest gap was large, resulting in a large difference in gray levels, so the segmentation effect was good. However, the temperature difference between the shaded canopy and forest gap was low, as was the gray-level difference. Part of the shaded canopy was incorrectly classified as background pixels, which led to the problem of missing segmentation (Figure 5). As a result, the overall canopy temperature was higher than the observed values obtained using the thermocouple (Table 2), and the accuracy of Tc extraction was reduced. Recent cases reported by Zhang et al. [21] also support the conclusion that the Otsu algorithm is suitable for cotton Tc extraction with low coverage but not for high coverage. In the case of high coverage, the gray-level difference between shaded soil pixels and canopy pixels is low and is inferior to that of sunlit soil pixels, resulting in a poor segmentation effect for shaded soil pixels. Yang et al. [31] also found that the accuracy of the Otsu algorithm in extracting the Tc of corn was lower than that obtained using the RGRI index (the red-green ratio index) method. Visual interpretation remains the best method for evaluating the segmentation effect. For the temperature threshold method, feature points in the first derivative of the curve were used to determine the segmentation threshold and make corrections using visual interpretation. Finally, we determined that the Tpixel corresponding to the point with a slope of 0.5, which is the threshold for the segmentation of forest gap and canopy pixels, deviated from the feature points (slope of 1) of the transition from the beginning of the growth section to the acceleration section in the logistic curve [29]. This result also shows that if the feature points in the first derivative of the curve are directly used to determine the segmentation threshold, there will be a missing segmentation phenomenon consistent with the Otsu algorithm. After correction using the visual interpretation method, missing segmentation was effectively prevented in our study (Figure 4). This result was also confirmed by the fact that the difference in Tc values extracted using the temperature threshold method, and the Otsu algorithm was less than zero (Figure 6a). However, when the canopy structure changes greatly, the degree of correction determined by the visual interpretation method may also change. This factor requires further research.
The Tc values extracted using the direct extraction method were low due to the inclusion of the forest gap pixels. However, this study found that the differences were low between the Tc values obtained using the temperature threshold method and those obtained using the direct extraction method (Table 2). This result was related to the high coverage in the forest ecosystem, the small number of pixels in the forest gaps, and the low-temperature differences between the forest gap and forest canopy. At the same time, this study also found that the difference in the Tc values extracted using the temperature threshold method and the direct extraction method was greater than zero (Figure 6b), demonstrating that the temperature threshold method had a positive effect on segmentation and the elimination of forest gap pixels. Therefore, the Tc values extracted using the temperature threshold method were more similar to the Tc values measured using the thermocouple. Wang et al. [32] found that under calm conditions, the leaf temperature difference between cork oaks undergoing severe drought stress and those with no drought stress was approximately 3 °C. However, in all the images collected during the growing season, the maximum Tc difference extracted using the temperature threshold method and the direct extraction method was 0.3143 °C, while the average Tc difference at 14:00 (the time commonly used to diagnose water status based on Tc) was 0.1078 °C. In other words, the maximum error of using Tc without extracted process to indicate plant water status reached 10.5%, and the average error was approximately 3.6%. In addition, wind speed is influential during image acquisition. Therefore, the actual indication error may be greater than the above value. Based on the results of this study, it is advisable that Tc values be extracted using the temperature threshold method in forest ecosystems. At the same time, the temperature threshold method that we established may also inform Tc extraction methods for crops or forest stands that have sparse coverage.
5. Conclusions
In this study, a temperature threshold method was successfully developed. This method solved the problem of missing segmentation and improved the accuracy of Tc observations. The point with a slope of 0.5 was found to be the transition point between the forest gap and the forest canopy in a curve composed of the normalized Taverage and CNOP. The Tpixel corresponding to this point in the curve was deemed to be the segmentation threshold where canopy pixels in the TIR imagery could be successfully extracted. Compared with the Otsu algorithm and direct extraction methods, the temperature threshold method exhibited the highest accuracy in extracting Tc values in cork oak plantations. Therefore, the temperature threshold method is the most suitable method for extracting Tc values in this land-use type. The temperature threshold method has the advantages of being easy to operate, inexpensive, and automated in terms of processing. This method provides technical support for extracting forest Tc values under long-term positioning observations and is of great significance for further research on the responses and adaptations of plantations to drought in the context of climate change.
Author Contributions
Conceptualization, J.Z. and X.G.; methodology, L.L. and Y.X.; software, L.L.; validation, H.H. and X.C.; writing—original draft preparation, L.L.; writing—review and editing, J.Z. and X.G.; visualization, L.L.; supervision, J.Z. and X.G.; J.Z. and X.G. contributed equally to this work. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Fundamental Research Funds for the Central Non-profit Research Institution of CAF (CAFYBB2018ZB001) and the National Nonprofit Institute Research Grant of the Chinese Academy of Forestry (CAFYBB2018ZA001) and the National Nonprofit In-stitute Research Grant of the Chinese Academy of Forestry (CAFZC2017M005).
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to the data needs to be used in many future works.
Acknowledgments
We thank Wang Qian from the Henan Agricultural University for advising. We thank Guangguang Li from Nanshan Forest Farm, Jiyuan City for contributing to field measurements. We thank Xiangfen Cheng for helping to measure canopy temperature. We also appreciate editors and three anonymous reviewers for their constructive suggestions and comments that improved the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. The Code for the MATLAB that Describes the Temperature Threshold Method
| 1: clear |
| 2: clc |
| 3: subfolder1=‘excel’; %read file |
| 4: search1=‘\*.xlsx’; |
| 5: d1=dir(fullfile(cd,[subfolder1 search1])); |
| 6: i1=regexp({d1.name},’xlsx’); |
| 7: d1={d1(~cellfun(‘isempty’,i1)).name}; |
| 8: r1=size(d1,1); |
| 9: path1=strcat(subfolder1,’\’); |
| 10: for N=1:r1 |
| 11: temp=[path1,d1{1,N}]; |
| 12: Temp=xlsread(temp); |
| 13: AR=tabulate(Temp(:)); % arranges the Tpixel data from the Excel table |
| 14: T=AR(:,1); % obtain each Tpixel data in the image |
| 15: Npix=AR(:,2); % obtains the number of pixels corresponding to each temperature in the image |
| 16: Cpix=cumsum(AR(:,2)); % Calculate the CNOP |
| 17: ST=T.* Npix; |
| 18: L=length(T(:,1)); |
| 19: for i=1:L |
| 20: U(i,1)=sum(ST (1:i,1)); |
| 21: end |
| 22: AT=U./ Cpix; % Calculate the Taverage |
| 23: plot(AT, Cpix); |
| 24: DATA1= AT ‘; |
| 25: NT=mapminmax(DATA1,0,1)’; % Normalize the Taverage |
| 26: DATA2= Cpix ‘; |
| 27: Ncpix=mapminmax(DATA2,0,1)’; % Normalize the CNOP |
| 28: p=log(1./ Ncpix -1); |
| 29: L=length(AT (:,1)); |
| 30: C=polyfit( NT(2:L-1,1),p(2:L-1,1),1); % Calculate the initial value required to fit the logistic curve |
| 31: B=C(1,1); |
| 32: A=C(1,2); |
| 33: W=2.71828^(A); |
| 34: Q=-B; |
| 35: x= NT; |
| 36: y= Ncpix; |
| 37: f=fittype(‘a/(1 + b*exp(-k*x))’,’independent’,’x’,’coefficients’,{‘a’,’b’,’k’}); % the logistic equation fitting of the curve |
| 38: options = fitoptions(f); |
| 39: options.StartPoint=[1 W Q]; |
| 40: cfun=fit(x,y,f,options) ; |
| 41: xi=0:0.0001:1; |
| 42: yi=cfun(xi); |
| 43: plot(x,y,’r*’,xi,yi,’b-’); |
| 44: a=cfun.a; |
| 45: b=cfun.b; |
| 46: k=cfun.k; |
| 47: syms X |
| 48: Y = a/(1 + b*exp(-k*X)); |
| 49: df1=diff(Y,X,1); % |
| 50: X1=solve(df1==0.5,X); % Find the normalized Taverage corresponding to the point where the first derivative is 0.5 in the fitting equation |
| 51: out1=eval(X1); |
| 52: MAX=max(AT (:,1)); |
| 53: MIN=min(AT (:,1)); |
| 54: Thr=min(out1(:,1))*(MAX-MIN)+MIN; %Calculate the Taverage corresponding to the point where the first derivative is 0.5, in the fitting equation |
| 55: [r,c]=find(AT<Thr); |
| 56: rlength=length(r(:)); |
| 57: Threshold=T(rlength,1); % converts the Taverage to Tpixel, and obtain the segmentation threshold |
| 58: G(N,1)= Threshold; |
| 59: [row,col]=find(Temp> Threshold); %find the coordinates of the canopy pixels whose temperature is higher than the segmentation threshold |
| 60: rowslength=length(row(:)); |
| 61: for i=1:rowslength |
| 62: D(i)=Temp(row(i),col(i)); % find the temperature corresponding to the coordinates End |
| 63: TempMean(N,1)=mean(D); %obtain the TC |
| 64: clear D |
| 65: clear U |
| 66: end |
References
- Blonquist, J.M.; Norman, J.M.; Bugbee, B. Automated measurement of canopy stomatal conductance based on infrared temperature. Agric. Meteorol. 2009, 149, 2183–2197. [Google Scholar] [CrossRef]
- Sánchez, J.M.; Kustas, W.P.; Caselles, V.; Anderson, M.C. Modelling surface energy fluxes over maize using a two-source patch model and radiometric soil and canopy temperature observations. Remote Sens. Environ. 2008, 112, 1130–1143. [Google Scholar] [CrossRef]
- Liu, N.; Deng, Z.; Wang, H.; Luo, Z.; Gutiérrez-Jurado, H.A.; He, X.; Guan, H. Thermal remote sensing of plant water stress in natural ecosystems. For. Ecol. Manag. 2020, 476, 118433. [Google Scholar] [CrossRef]
- García-Tejero, I.F.; Costa, J.M.; Egipto, R.; Durán-Zuazo, V.H.; Lima, R.S.N.; Lopes, C.M.; Chaves, M.M. Thermal data to monitor crop-water status in irrigated Mediterranean viticulture. Agric. Water Manag. 2016, 176, 80–90. [Google Scholar] [CrossRef]
- García-Tejero, I.F.; Hernández, A.; Padilla-Díaz, C.M.; Diaz-Espejo, A.; Fernández, J.E. Assessing plant water status in a hedgerow olive orchard from thermography at plant level. Agric. Water Manag. 2017, 188, 50–60. [Google Scholar] [CrossRef] [Green Version]
- Idso, S.B. Nonwaterstressed baselines a key to measuring and interpreting plant water stress. Agric. Meteorol. 1982, 27, 59–70. [Google Scholar] [CrossRef]
- Khorsandi, A.; Hemmat, A.; Mireei, S.A.; Amirfattahi, R.; Ehsanzadeh, P. Plant temperature-based indices using infrared thermography for detecting water status in sesame under greenhouse conditions. Agric. Water Manag. 2018, 204, 222–233. [Google Scholar] [CrossRef]
- Dai, A. Increasing drought under global warming in observations and models. Nat. Clim. Chang. 2012, 3, 52–58. [Google Scholar] [CrossRef]
- Bonan, G.B. Forests and climate change: Forcings, feedbacks, and the climate benefits of forests. Science 2008, 320, 1444–1449. [Google Scholar] [CrossRef] [Green Version]
- Breshears, D.D.; Cobb, N.S.; Rich, P.M.; Price, K.P.; Allen, C.D.; Balice, R.G.; Romme, W.H.; Kastens, J.H.; Floyd, M.L.; Belnap, J.; et al. Regional vegetation die-off in response to global-change-type drought. Proc. Natl. Acad. Sci. USA 2005, 102, 15144–151448. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Still, C.J.; Roberts, D.A.; Goulden, M.L. Thermal infrared imaging of conifer leaf temperatures: Comparison to thermocouple measurements and assessment of environmental influences. Agric. For. Meteorol. 2018, 248, 361–371. [Google Scholar] [CrossRef]
- Kim, Y.; Still, C.J.; Hanson, C.V.; Kwon, H.; Greer, B.T.; Law, B.E. Canopy skin temperature variations in relation to climate, soil temperature, and carbon flux at a ponderosa pine forest in central Oregon. Agric. For. Meteorol. 2016, 226, 161–173. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Zhang, Q.; Huang, D. A review of imaging techniques for plant phenotyping. Sensors 2014, 14, 20078–20111. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez-Dugo, V.; Zarco-Tejada, P.; Nicolás, E.; Nortes, P.A.; Alarcón, J.J.; Intrigliolo, D.S.; Fereres, E. Using high resolution UAV thermal imagery to assess the variability in the water status of five fruit tree species within a commercial orchard. Precis. Agric. 2013, 14, 660–678. [Google Scholar] [CrossRef]
- Sankaran, S.; Maja, J.M.; Buchanon, S.; Ehsani, R. Huanglongbing (citrus greening) detection using visible, near infrared and thermal imaging techniques. Sensors 2013, 13, 2117–2130. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- García-Tejero, I.; Durán-Zuazo, V.H.; Arriaga, J.; Hernández, A.; Vélez, L.M.; Muriel-Fernández, J.L. Approach to assess infrared thermal imaging of almond trees under water-stress conditions. Fruits 2012, 67, 463–474. [Google Scholar] [CrossRef]
- Han, W.T.; Zhang, L.Y.; Niu, Y.X.; Shi, X. Review on UAV Remote Sensing Application in Precision Irrigation. Trans. CSAE 2020, 51, 1–14. [Google Scholar] [CrossRef]
- Zhang, L.; Niu, Y.; Zhang, H.; Han, W.; Li, G.; Tang, J.; Peng, X. Maize Canopy Temperature Extracted From UAV Thermal and RGB Imagery and Its Application in Water Stress Monitoring. Front. Plant Sci. 2019, 10, 1270. [Google Scholar] [CrossRef]
- Poblete, T.; Ortega-Farias, S.; Ryu, D. Automatic Coregistration Algorithm to Remove Canopy Shaded Pixels in UAV-Borne Thermal Images to Improve the Estimation of Crop Water Stress Index of a Drip-Irrigated Cabernet Sauvignon Vineyard. Sensors 2018, 18, 397. [Google Scholar] [CrossRef] [Green Version]
- Meron, M.; Sprintsin, M.; Tsipris, J.; Alchanatis, V.; Cohen, Y. Foliage temperature extraction from thermal imagery for crop water stress determination. Precis. Agric. 2013, 14, 467–477. [Google Scholar] [CrossRef]
- Zhang, Z.; Bian, J.; Han, W.; Fu, Q.; Chen, S.; Cui, T. Diagnosis of cotton water stress using unmanned aerial vehicle thermal infrared remote sensing after removing soil. Trans. CSAE 2018, 49, 250–260. [Google Scholar] [CrossRef]
- Schiewe, J. Segmentation of high-resolution remotely sensed data-concepts, applications and problems. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 380–385. [Google Scholar]
- Räsänen, A.; Rusanen, A.; Kuitunen, M.; Lensu, A. What makes segmentation good? A case study in boreal forest habitat mapping. Int. J. Remote Sens. 2013, 34, 8603–8627. [Google Scholar] [CrossRef]
- Maini, R.; Aggarwal, H. Study and comparison of various image edge detection techniques. Int. J. Image Process. (IJIP) 2009, 3, 1–11. [Google Scholar]
- Bian, J.; Zhang, Z.; Chen, J.; Chen, H.; Cui, C.; Li, X.; Chen, S.; Fu, Q. Simplified Evaluation of CottonWater Stress Using High Resolution Unmanned Aerial Vehicle Thermal Imagery. Remote Sens. 2019, 11, 267. [Google Scholar] [CrossRef] [Green Version]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Ludovisi, R.; Tauro, F.; Salvati, R.; Khoury, S.; Scarascia, G.M.; Harfouche, A. UAV-Based Thermal Imaging for High-Throughput Field Phenotyping of Black Poplar Response to Drought. Front. Plant Sci. 2017, 8, 1681. [Google Scholar] [CrossRef] [PubMed]
- Cheng, X.F.; Zhou, Y.; Hu, M.J.; Wang, F.; Huang, H.; Zhang, J.S. The Links between Canopy Solar-Induced Chlorophyll Fluorescence and Gross Primary Production Responses to Meteorological Factors in the Growing Season in Deciduous Broadleaf Forest. Remote Sens. 2021, 13, 2363. [Google Scholar] [CrossRef]
- Wang, Q.; Li, M.W.; Li, Q.; Chen, J.L.; Yang, X.T.; Kou, Y.B.; Zhang, J.S. Drought stress indexes of soil with different texture based on chlorophyll fluorescence parameters of Quercus variabilis seedling. Sci. Soil Water Conserv. 2021, 19, 27–32. [Google Scholar] [CrossRef]
- Park, S.; Ryu, D.; Fuentes, S.; Chung, H.; Hernández-Montes, E.; O’Connell, M. Adaptive Estimation of Crop Water Stress in Nectarine and Peach Orchards Using High-Resolution Imagery from an Unmanned Aerial Vehicle (UAV). Remote Sens. 2017, 9, 828. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Chen, J.Y.; Zhou, Y.C.; Cui, W.X.; Yang, N. A Study on the Method of UAV Thermal Infrared Remote Sensing to Retrieve Soil Moisture Content in Corn Root Zone. Water Sav. Irrig. 2021, 3, 12–18. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, L.Q.; Wang, P.S.; Cao, J.; Chen, J.L.; Zhang, J.S.; Kou, Y.B. Series lines of climate space up limit of Quercus variabilis seedlings in static wind and different soil water stress. Sci. Soil Water Conserv. 2017, 15, 73–80. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).