
UAV-Based Mapping of Banana Land Area for Village-Level Decision-Support in Rwanda




Abstract
:1. Introduction
2. Materials and Methods
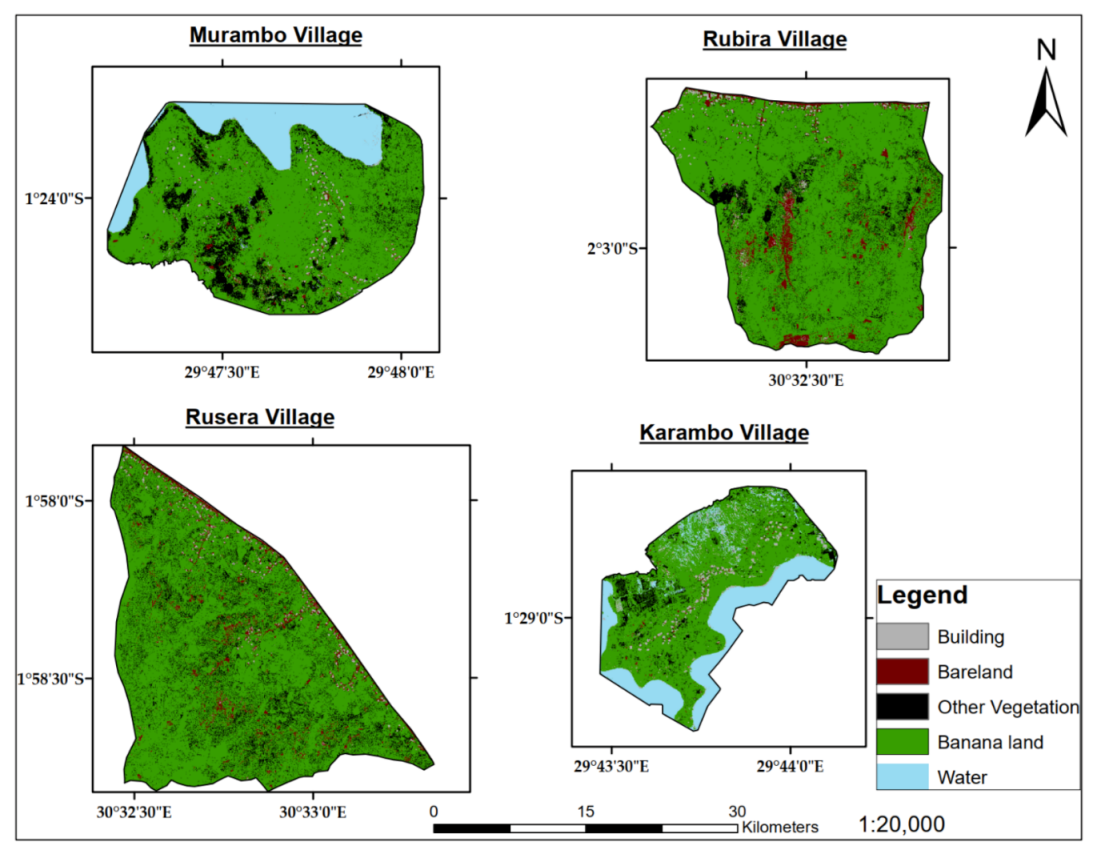
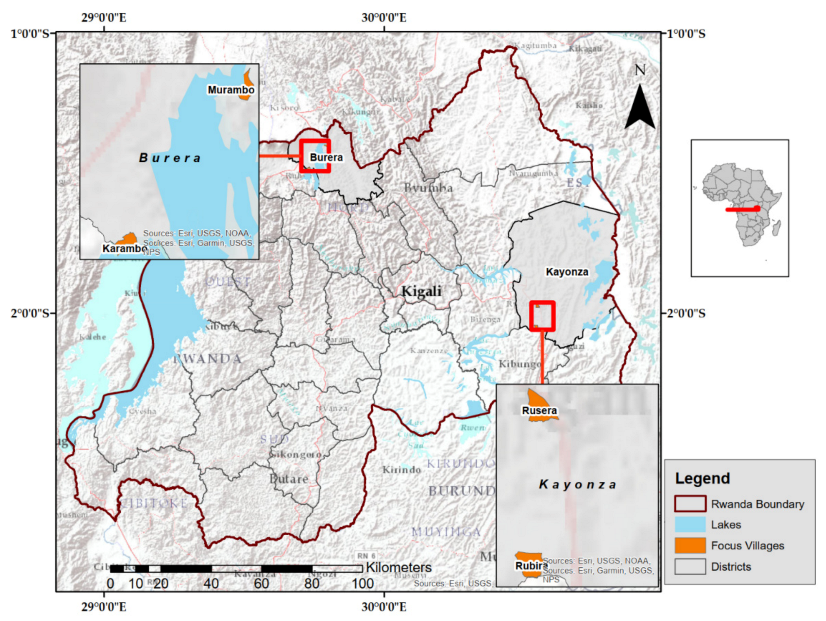
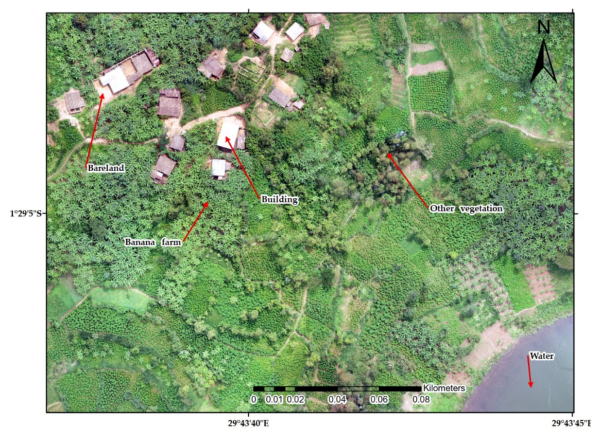
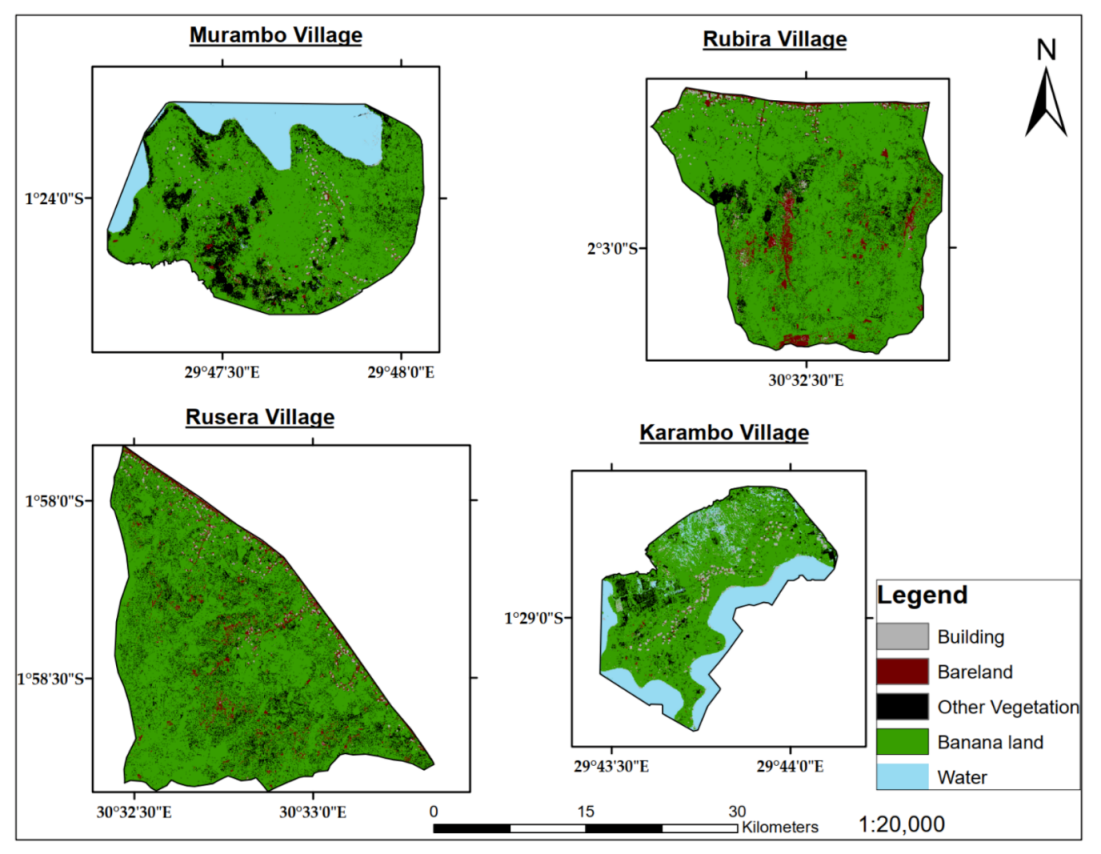
2.1. Study Area
2.2. Data Description
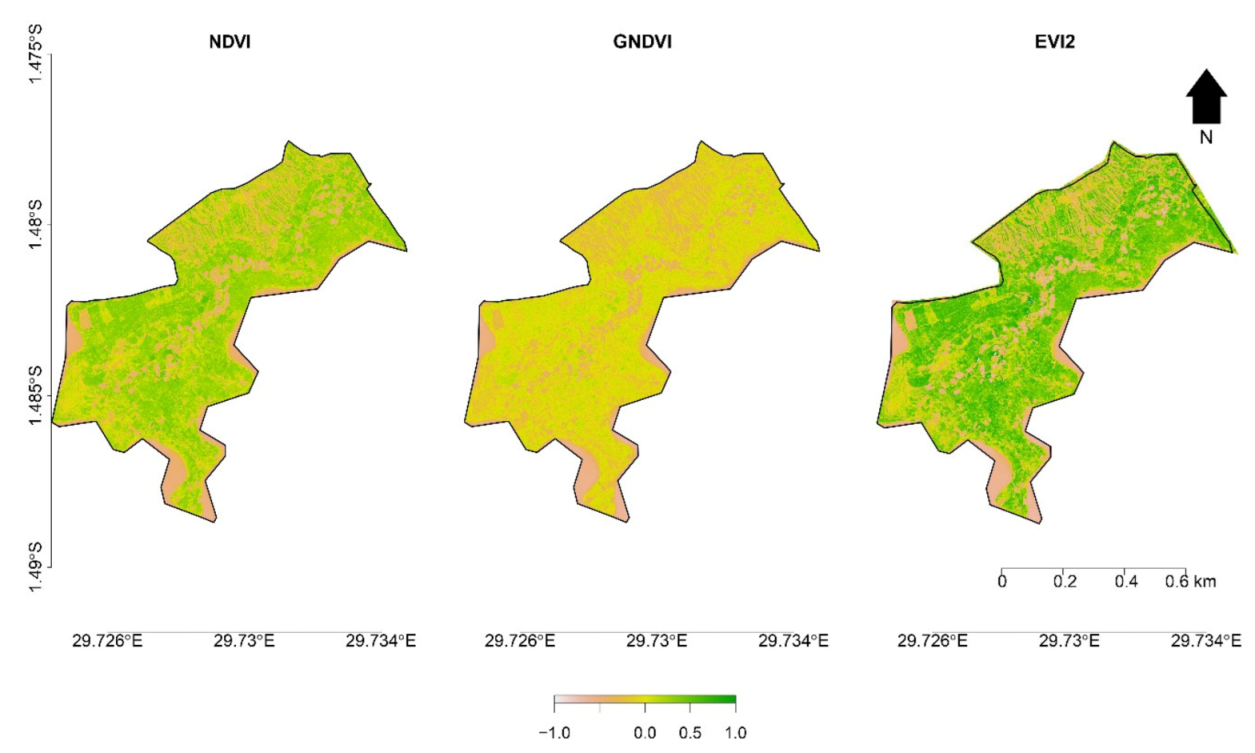
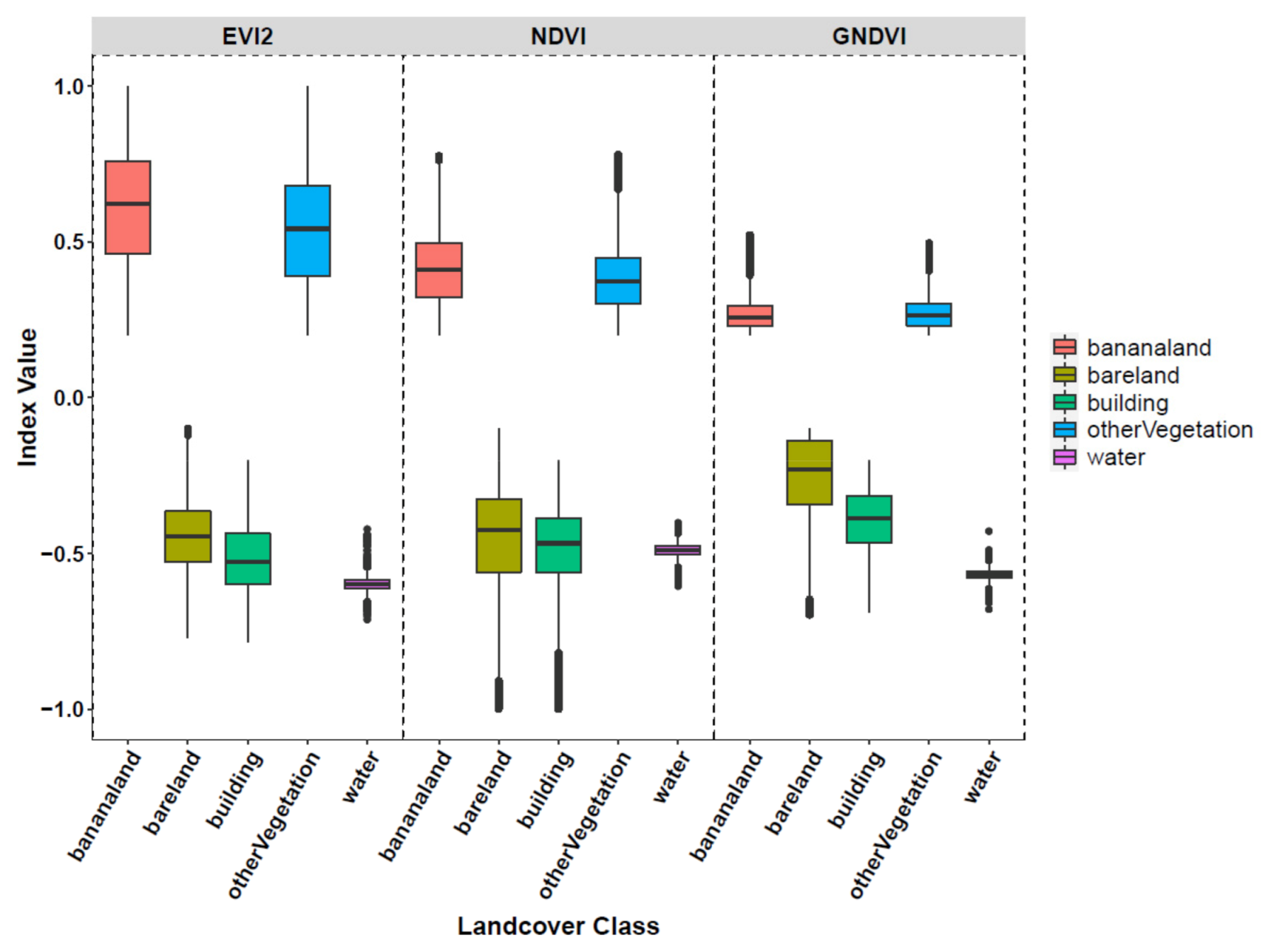
2.3. Vegetative Indices
2.4. Data Splitting
2.5. Classification Methods
3. Results
3.1. Descriptive Statistics
3.2. Overall Classification Accuracy
3.3. Effect of Input Data Richness Level
3.4. Banana Land Area Assessment
4. Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| REFERENCE | ||||||
|---|---|---|---|---|---|---|
| PREDICTION | Banana Land | Bare Land | Building | Other Vegetation | Water | |
| SVM | Banana land | 41,731 | 47 | 2441 | 91 | 0 |
| Bare land | 3027 | 8 | 4888 | 23 | 0 | |
| Building | 4232 | 59 | 9166 | 28 | 0 | |
| Other vegetation | 22,616 | 25 | 1557 | 184 | 0 | |
| Water | 0 | 0 | 87 | 0 | 0 | |
| CART | Banana land | 43,063 | 333 | 519 | 394 | 1 |
| Bare land | 1293 | 4182 | 1522 | 942 | 7 | |
| Building | 1890 | 597 | 10,831 | 161 | 6 | |
| Other vegetation | 400 | 193 | 127 | 23,658 | 4 | |
| Water | 0 | 0 | 0 | 0 | 87 | |
| RF | Banana land | 43,755 | 178 | 319 | 58 | 0 |
| Bare land | 753 | 6087 | 761 | 343 | 2 | |
| Building | 820 | 361 | 12,246 | 58 | 0 | |
| Other vegetation | 70 | 103 | 38 | 24,171 | 0 | |
| Water | 0 | 0 | 0 | 0 | 87 | |
| REFERENCE | ||||||
|---|---|---|---|---|---|---|
| PREDICTION | Banana Land | Bare Land | Building | Other Vegetation | Water | |
| SVM | Banana land | 125,036 | 9259 | 12,556 | 67,956 | 0 |
| Bare land | 130 | 33 | 181 | 84 | 0 | |
| Building | 7052 | 14,449 | 27,610 | 4631 | 288 | |
| Other vegetation | 286 | 48 | 85 | 522 | 0 | |
| Water | 0 | 1 | 3 | 0 | 0 | |
| CART | Banana land | 128,888 | 3983 | 5837 | 1035 | 1 |
| Bare land | 718 | 11,707 | 962 | 382 | 1 | |
| Building | 1555 | 5357 | 32,999 | 589 | 0 | |
| Other vegetation | 1195 | 2715 | 634 | 71,304 | 0 | |
| Water | 4 | 35 | 18 | 5 | 286 | |
| RF | Banana land | 131,110 | 1779 | 1716 | 141 | 0 |
| Bare land | 348 | 19,390 | 854 | 249 | 1 | |
| Building | 849 | 1989 | 37,731 | 121 | 0 | |
| Other vegetation | 53 | 639 | 149 | 72,804 | 1 | |
| Water | 0 | 0 | 0 | 0 | 286 | |
| REFERENCE | ||||||
|---|---|---|---|---|---|---|
| PREDICTION | Banana Land | Bare Land | Building | Other Vegetation | Water | |
| SVM | Banana land | 207,910 | 15,321 | 21,129 | 112,845 | 0 |
| Bare land | 152 | 36 | 239 | 100 | 0 | |
| Building | 12,138 | 24,247 | 46,012 | 8048 | 490 | |
| Other vegetation | 453 | 91 | 112 | 881 | 0 | |
| Water | 1 | 1 | 3 | 0 | 0 | |
| CART | Banana land | 214,694 | 6017 | 8497 | 2746 | 0 |
| Bare land | 1313 | 19,668 | 2315 | 353 | 1 | |
| Building | 2444 | 9307 | 55,837 | 1021 | 0 | |
| Other vegetation | 1941 | 4305 | 1033 | 118,134 | 0 | |
| Water | 11 | 45 | 33 | 5 | 489 | |
| RF | Banana land | 218,503 | 2875 | 2768 | 234 | 0 |
| Bare land | 645 | 32,409 | 1352 | 423 | 1 | |
| Building | 1399 | 3342 | 63,134 | 201 | 0 | |
| Other vegetation | 107 | 1069 | 241 | 121,016 | 0 | |
| Water | 0 | 1 | 0 | 0 | 489 | |
References
- Awokuse, T.O. Does Agriculture Really Matter for Economic Growth in Developing Countries? In Agricultural and Applied Economics Association, Proceedings of the 2009 Annual Meeting, Wisconsin WI, USA, 26–28 July 2009; Wiley Publishers: Toronto, ON, Canada, 2019; Volume 63. [Google Scholar]
- FAO. The State of Food Security and Nutrition in the World 2018. Building Climate Resilience for Food Security and Nutrition—Policy Support and Governance Gateway; Food and Agriculture Organization of the United Nations: Rome, Italy, 2018; pp. 820–821. Available online: http://www.fao.org/policy-support/tools-and-publications/resources-details/en/c/1152267/ (accessed on 11 September 2021).
- Salami, A.; Kamara, A.B.; Brixiova, Z. Smallholder Agriculture in East Africa: Trends, Constraints and Opportunities; African Development Bank Group: Abidjan, Ivory Coast, 2010. [Google Scholar]
- Foley, J.A.; DeFries, R.; Asner, G.P.; Barford, C.; Bonan, G.; Carpenter, S.R.; Chapin, F.S.; Coe, M.; Daily, G.C.; Gibbs, H.K.; et al. Global consequences of land use. Science 2005, 309, 570–574. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eitelberg, D.A.; van Vliet, J.; Verburg, P. A review of global potentially available cropland estimates and their consequences for model-based assessments. Glob. Chang. Biol. 2015, 21, 1236–1248. [Google Scholar] [CrossRef] [PubMed]
- Monfreda, C.; Ramankutty, N.; Foley, J.A. Farming the planet: Geographic distribution of crop areas, yields, physiological types, and net primary production in the year. Glob. Biogeochem. Cycles 2008, 22. [Google Scholar] [CrossRef]
- Castillejo-González, I.L.; López-Granados, F.; García-Ferrer, A.; Pe, J.M.; Sánchez, M.; Orden, D. Object-and pixel-based analysis for mapping crops and their agro-environmental associated measures using QuickBird imagery. Eur. J. Agron. 2009, 68, 207–215. [Google Scholar] [CrossRef]
- Cihlar, J. Land cover mapping of large areas from satellites: Status and research priorities. Int. J. Remote Sens. 2000, 21, 1093–1114. [Google Scholar] [CrossRef]
- Weersink, A.; Fraser, E.; Pannell, D.; Duncan, E.; Rotz, S. Opportunities and challenges for big data in agricultural and environmental analysis. Annu. Rev. Resour. Econ. 2018, 10, 19–37. [Google Scholar] [CrossRef]
- Tittonell, P.; Vanlauwe, B.; Leffelaar, P.; Giller, K. Estimating yields of tropical maize genotypes from non-destructive, on-farm plant morphological measurements. Agric. Ecosyst. Environ. 2005, 105, 213–220. [Google Scholar] [CrossRef]
- Neupane, B.; Horanont, T.; Hung, N.D. Deep learning based banana plant detection and counting using high-resolution red-green-blue (RGB) images collected from unmanned aerial vehicle (UAV). PLoS ONE 2019, 14, e0223906. [Google Scholar] [CrossRef]
- Tripicchio, P.; Satler, M.; Dabisias, G.; Ruffaldi, E.; Avizzano, C.A. Towards smart farming and sustainable agriculture with drones. In Proceedings of the Proceedings-2015 International Conference on Intelligent Environments, Prague, Czech Republic, 15–17 July 2015; pp. 140–143. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Bannari, A.; Morin, D.; Bonn, F.; Huete, A.R. A review of vegetation indices. Remote Sens. Rev. 1995, 13, 95–120. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combination for monitoring vegetation. J. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Jiang, Z.; Huete, A.R.; Didan, K.; Miura, T. Development of a two-band enhanced vegetation index without a blue band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
- Adewopo, J.; Peter, H.; Mohammed, I.; Kamara, A.; Craufurd, P.; Vanlauwe, B. Can a Combination of UAV-Derived Vegetation Indices with Biophysical Variables Improve Yield Variability Assessment in Smallholder Farms? Agronomy 2020, 10, 1934. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W.; Kooistra, L.; Brande, M.M.M.V.D. Using Sentinel-2 Data for Retrieving LAI and Leaf and Canopy Chlorophyll Content of a Potato Crop. Remote Sens. 2017, 9, 405. [Google Scholar] [CrossRef] [Green Version]
- Svotwa, E.; Masuka, A.J.; Maasdorp, B.; Murwira, A.; Shamudzarira, M. Remote Sensing Applications in Tobacco Yield Estimation and the Recommended Research in Zimbabwe. ISRN Agron. 2013, 2013, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Chew, R.; Rineer, J.; Beach, R.; O‘Neil, M.; Ujeneza, N.; Lapidus, D.; Miano, T.; Hegarty-Craver, M.; Polly, J.; Temple, D.S. Deep Neural Networks and Transfer Learning for Food Crop Identification in UAV Images. Drones 2020, 4, 7. [Google Scholar] [CrossRef] [Green Version]
- Hall, O.; Dahlin, S.; Marstorp, H.; Bustos, M.F.A.; Öborn, I.; Jirström, M. Classification of Maize in Complex Smallholder Farming Systems Using UAV Imagery. Drones 2018, 2, 22. [Google Scholar] [CrossRef] [Green Version]
- Raeva, P.L.; Šedina, J.; Dlesk, A. Monitoring of crop fields using multispectral and thermal imagery from UAV. Eur. J. Remote Sens. 2019, 52, 192–201. [Google Scholar] [CrossRef] [Green Version]
- Useya, J.; Chen, S.; Murefu, M. Cropland Mapping and Change Detection: Toward Zimbabwean Cropland Inventory. IEEE Access 2019, 7, 53603–53620. [Google Scholar] [CrossRef]
- Lu, D.; Weng, Q. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2007, 28, 823–870. [Google Scholar] [CrossRef]
- Chen, Y.; Lu, D.; Moran, E.; Batistella, M.; Dutra, L.V.; Sanches, I.D.; da Silva, R.F.B.; Huang, J.; Luiz, A.J.B.; de Oliveira, M.A.F. Mapping croplands, cropping patterns, and crop types using MODIS time-series data. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 133–147. [Google Scholar] [CrossRef]
- Gumma, M.K.; Nelson, A.; Thenkabail, P.S.; Singh, A.N. Mapping rice areas of South Asia using MODIS multitemporal data. J. Appl. Remote Sens. 2011, 5, 053547. [Google Scholar] [CrossRef] [Green Version]
- Hegarty-Craver, M.; Polly, J.; ONeil, M.; Ujeneza, N.; Rineer, J.; Beach, R.H.; Lapidus, D.; Temple, D.S. Remote Crop Mapping at Scale: Using Satellite Imagery and UAV-Acquired Data as Ground Truth. Remote Sens. 2020, 12, 1984. [Google Scholar] [CrossRef]
- Huang, C.; Davis, L.S.; Townshend, J.R.G. An assessment of support vector machines for land cover classification. Int. J. Remote Sens. 2002, 23, 725–749. [Google Scholar] [CrossRef]
- Foody, G.M.; Mathur, A. Toward intelligent training of supervised image classifications: Directing training data acquisition for SVM classification. Remote Sens. Environ. 2004, 93, 107–117. [Google Scholar] [CrossRef]
- Löw, F.; Michel, U.; Dech, S.; Conrad, C. Impact of feature selection on the accuracy and spatial uncertainty of per-field crop classification using Support Vector Machines. ISPRS J. Photogramm. Remote Sens. 2013, 85, 102–119. [Google Scholar] [CrossRef]
- Thanh Noi, P.; Kappas, M. Comparison of random forest, k-nearest neighbor, and support vector machine classifiers for land cover classification using Sentinel-2 imagery. Sensors 2018, 18, 18. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Zhao, L.; Shi, Y.; Liu, B.; Hovis, C.; Duan, Y.; Shi, Z. Finer Classification of Crops by Fusing UAV Images and Sentinel-2A Data. Remote Sens. 2019, 11, 3012. [Google Scholar] [CrossRef] [Green Version]
- Tuyishime, C.; Pernechele, V.; Bizimana, C.; Semwaga, O. Rwanda Food and Agriculture Policy Monitoring Review 2020; Food and Agriculture Organization of the United Nations: Rome, Italy, 2020. [Google Scholar]
- McCampbell, M.; Schut, M.; Bergh, I.V.D.; van Schagen, B.; Vanlauwe, B.; Blomme, G.; Gaidashova, S.; Njukwe, E.; Leeuwis, C. Xanthomonas Wilt of Banana (BXW) in Central Africa: Opportunities, challenges, and pathways for citizen science and ICT-based control and prevention strategies. NJAS-Wagening. J. Life Sci. 2018, 86–87, 89–100. [Google Scholar] [CrossRef]
- Tripathi, L.; Tripathi, J.N. Relative susceptibility of banana cultivars to Xanthomonas campestris pv. musacearum. Afr. J. Biotechnol. 2009, 8, 5343–5350. [Google Scholar]
- Ali, D.A.; Deininger, K. Is There a Farm-Size Productivity Relationship in African Agriculture? Evidence from Rwanda. Land Econ. 2018, 94, 317–343. [Google Scholar] [CrossRef]
- Lowder, S.K.; Skoet, J.; Raney, T. The Number, Size, and Distribution of Farms, Smallholder Farms, and Family Farms Worldwide. World Dev. 2016, 87, 16–29. [Google Scholar] [CrossRef] [Green Version]
- Talukdar, S.; Singha, P.; Mahato, S.; Shahfahad; Pal, S.; Liou, Y.-A.; Rahman, A. Land-Use Land-Cover Classification by Machine Learning Classifiers for Satellite Observations—A Review. Remote Sens. 2020, 12, 1135. [Google Scholar] [CrossRef] [Green Version]
- Rogan, J.; Franklin, J.; Stow, D.; Miller, J.; Woodcock, C.; Roberts, D. Mapping land-cover modifications over large areas: A comparison of machine learning algorithms. Remote Sens. Environ. 2008, 112, 2272–2283. [Google Scholar] [CrossRef]
- Mondal, P. Quantifying surface gradients with a 2-band Enhanced Vegetation Index (EVI2). Ecol. Indic. 2011, 11, 918–924. [Google Scholar] [CrossRef]
- Foody, G.M. Status of land cover classification accuracy assessment. Remote Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
- Quinlan, J.R. Induction of decision trees. Mach. Learn. 1986, 1, 81–106. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Tayor and Francis Group: London, UK, 1984; 368p. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Guo, W.; Rage, U.K.; Ninomiya, S. Illumination invariant segmentation of vegetation for time series wheat images based on decision tree model. Comput. Electron. Agric. 2013, 96, 58–66. [Google Scholar] [CrossRef]
- Hsu, C.-W.; Chang, C.-C.; Lin, C.-J. A Practical Guide to Support Vector Classification; Department of Computer Science and information Engineering, National Taiwan University: Taipei, Taiwan, 2003. [Google Scholar]
| Banana Land | Bare Land | Built-Up | Other Vegetation | Water | |
|---|---|---|---|---|---|
| Murambo | 126 | 131 | 194 | 77 | 4 |
| Karambo | 108 | 96 | 219 | 62 | 4 |
| Rubira | 179 | 135 | 274 | 41 | N/A |
| Rusera | 202 | 74 | 273 | 107 | N/A |
| TOTAL | 615 | 436 | 960 | 287 | 8 |
| Data Richness | Number of Data Samples | Training (70%) | Test (30%) |
|---|---|---|---|
| Level 1 | 750 | 525 | 225 |
| Level 2 | 1500 | 1050 | 450 |
| Level 3 | 2306 | 1615 | 691 |
| Data Points | SVM | CART | RF | |||
|---|---|---|---|---|---|---|
| Accuracy | kappa | Accuracy | kappa | Accuracy | kappa | |
| 750 | 0.563 | 0.253 | 0.907 | 0.856 | 0.957 | 0.934 |
| 1500 | 0.567 | 0.252 | 0.907 | 0.856 | 0.967 | 0.949 |
| 2306 | 0.566 | 0.252 | 0.908 | 0.857 | 0.967 | 0.950 |
| District | Village | Banana Area (ha) | Village Area (ha) | Banana Land (%) |
|---|---|---|---|---|
| Kayonza | Rusera | 134.02 | 165.58 | 80.93 |
| Kayonza | Rubira | 121.12 | 147.12 | 82.32 |
| Burera | Murambo | 96.70 | 143.72 | 67.28 |
| Burera | Karambo | 52.30 | 83.8 | 62.41 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kilwenge, R.; Adewopo, J.; Sun, Z.; Schut, M. UAV-Based Mapping of Banana Land Area for Village-Level Decision-Support in Rwanda. Remote Sens. 2021, 13, 4985. https://doi.org/10.3390/rs13244985
Kilwenge R, Adewopo J, Sun Z, Schut M. UAV-Based Mapping of Banana Land Area for Village-Level Decision-Support in Rwanda. Remote Sensing. 2021; 13(24):4985. https://doi.org/10.3390/rs13244985
Chicago/Turabian StyleKilwenge, Regina, Julius Adewopo, Zhanli Sun, and Marc Schut. 2021. "UAV-Based Mapping of Banana Land Area for Village-Level Decision-Support in Rwanda" Remote Sensing 13, no. 24: 4985. https://doi.org/10.3390/rs13244985
APA StyleKilwenge, R., Adewopo, J., Sun, Z., & Schut, M. (2021). UAV-Based Mapping of Banana Land Area for Village-Level Decision-Support in Rwanda. Remote Sensing, 13(24), 4985. https://doi.org/10.3390/rs13244985