
Geometric-Manifold-Assisted Distributed Navigation Probabilistic Information Fusion Cooperative Positioning Algorithm



Abstract
:1. Introduction
2. System Model
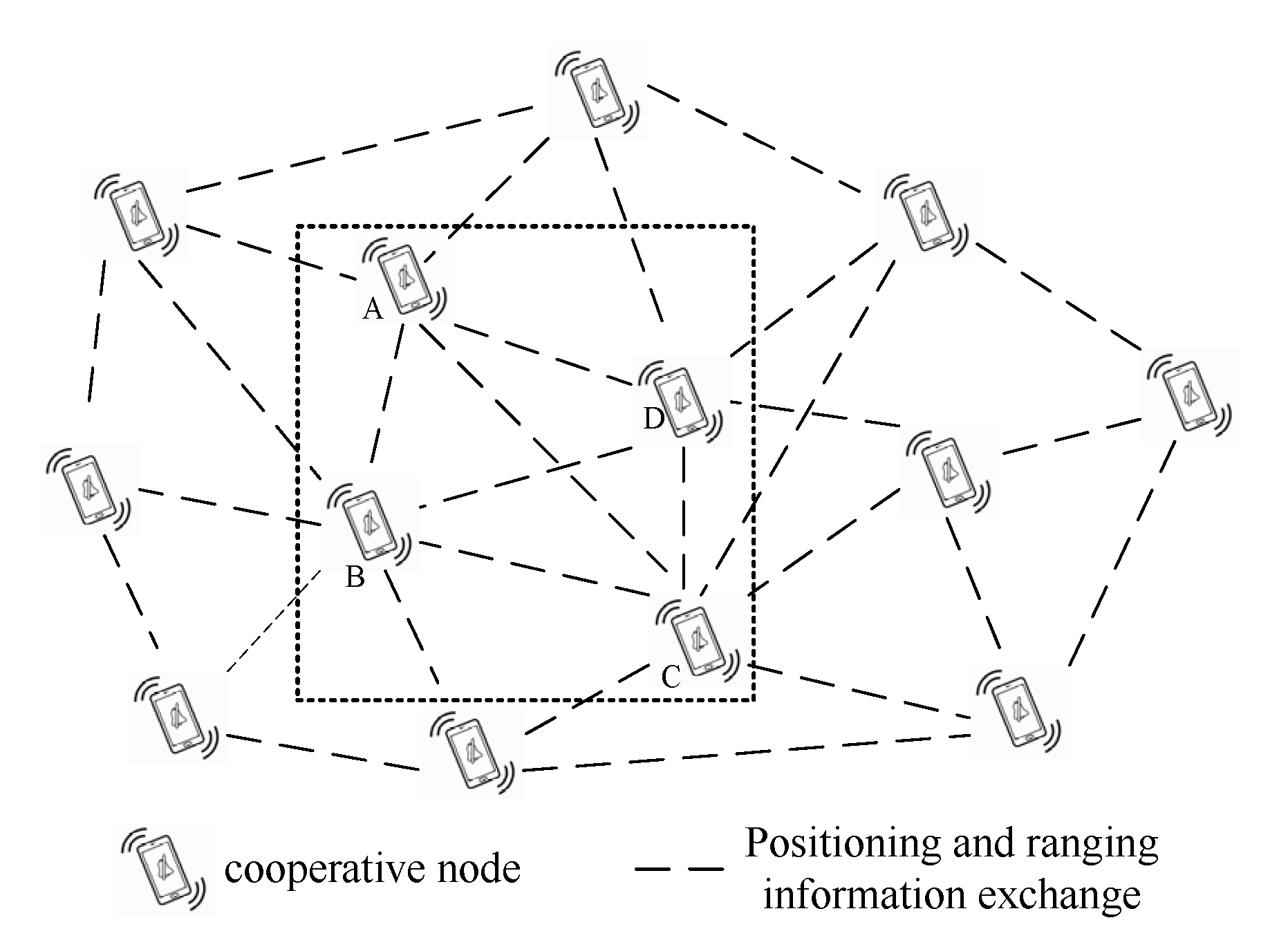
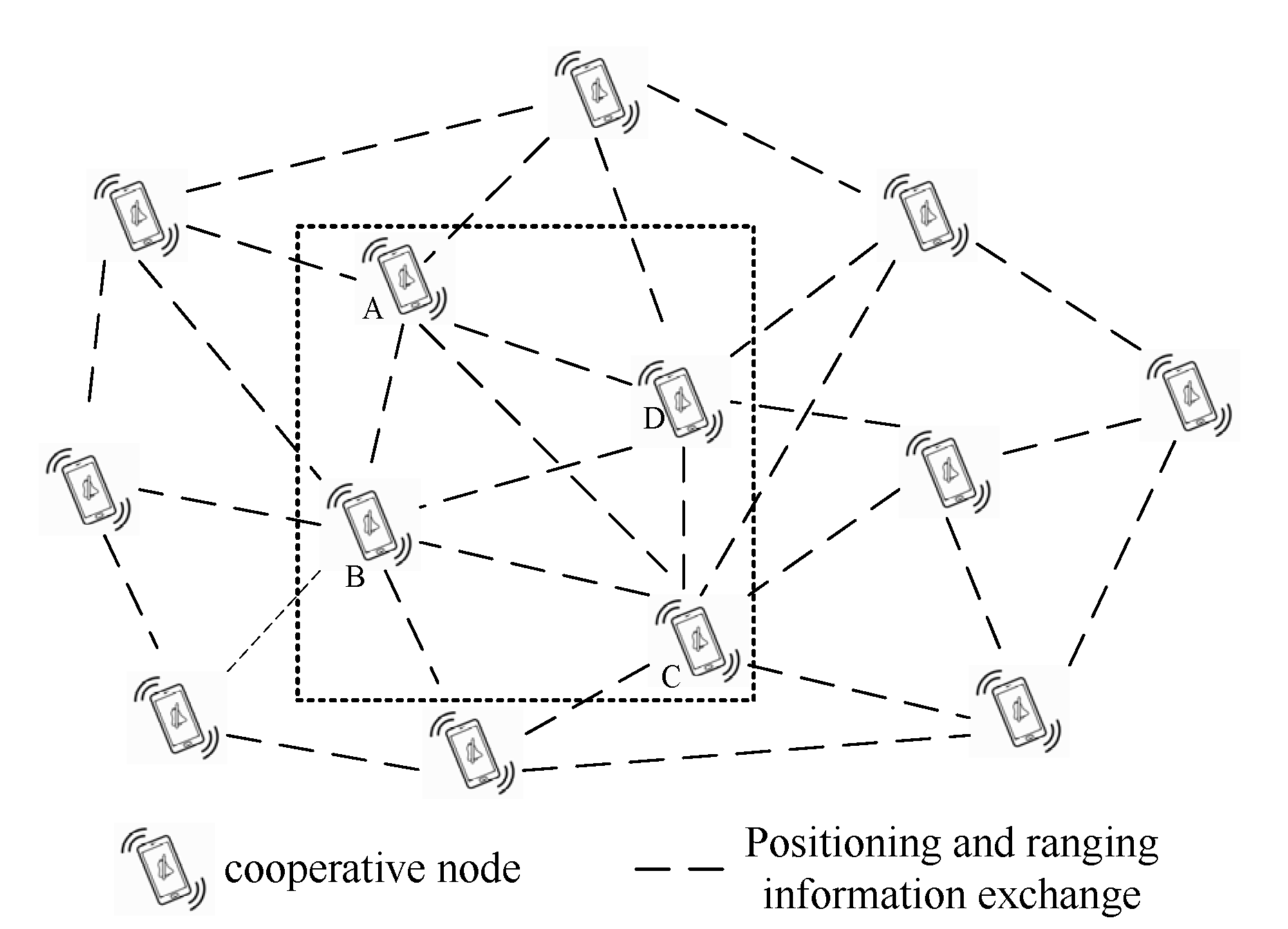
2.1. Cooperative Positioning System Model
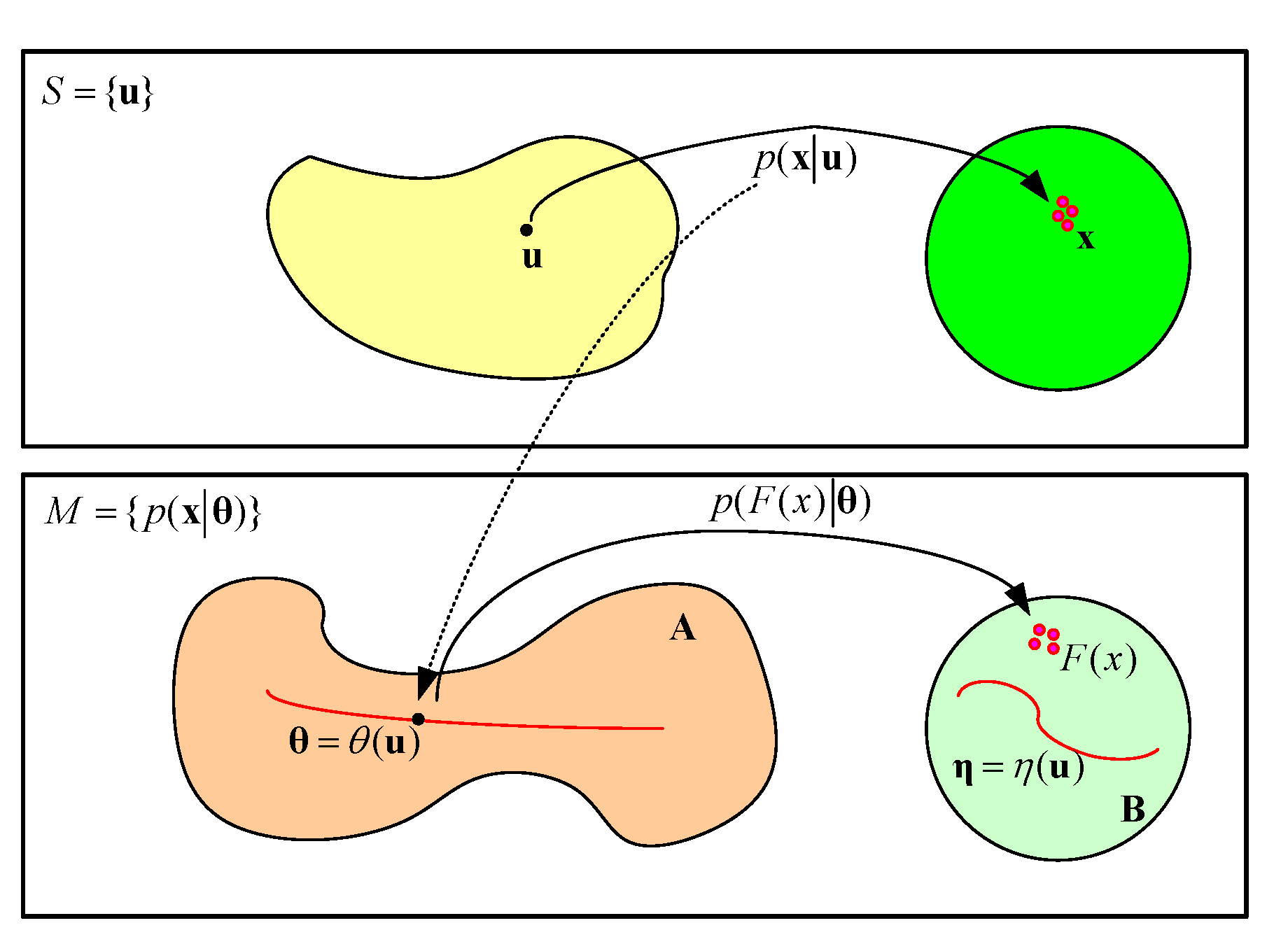
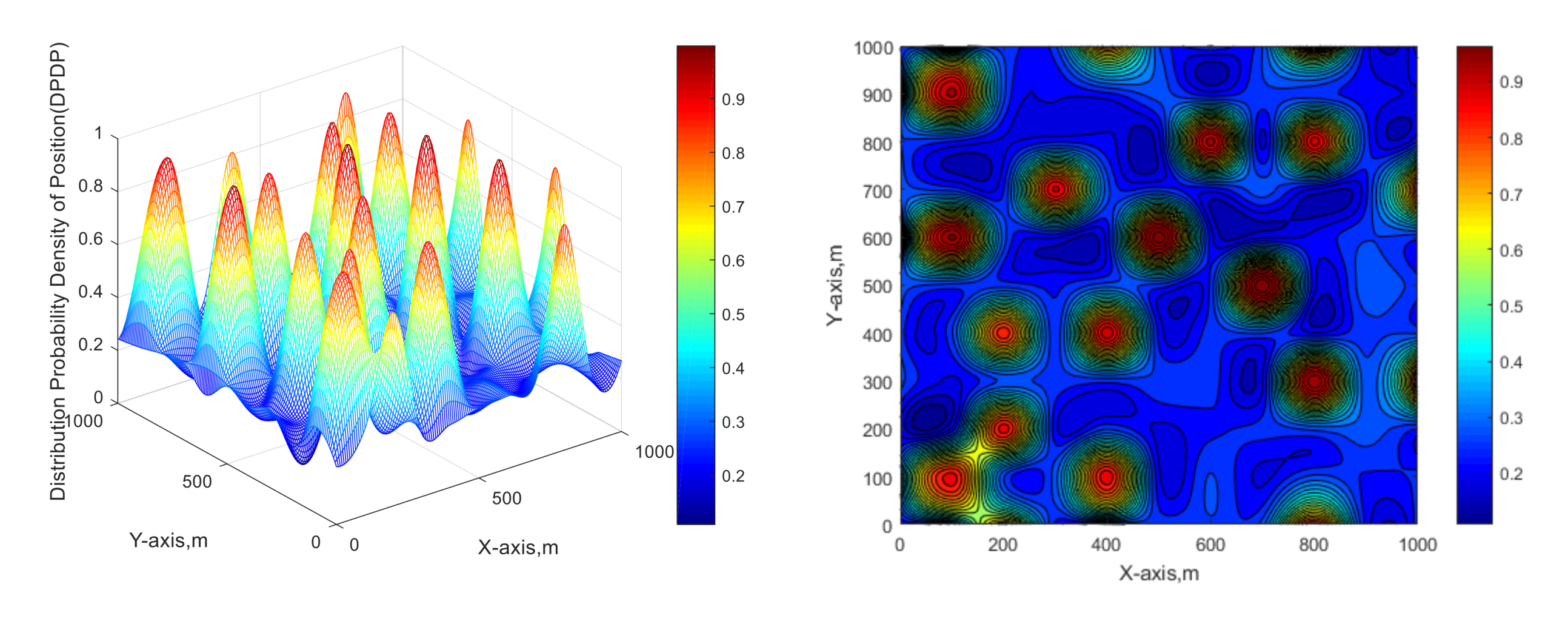
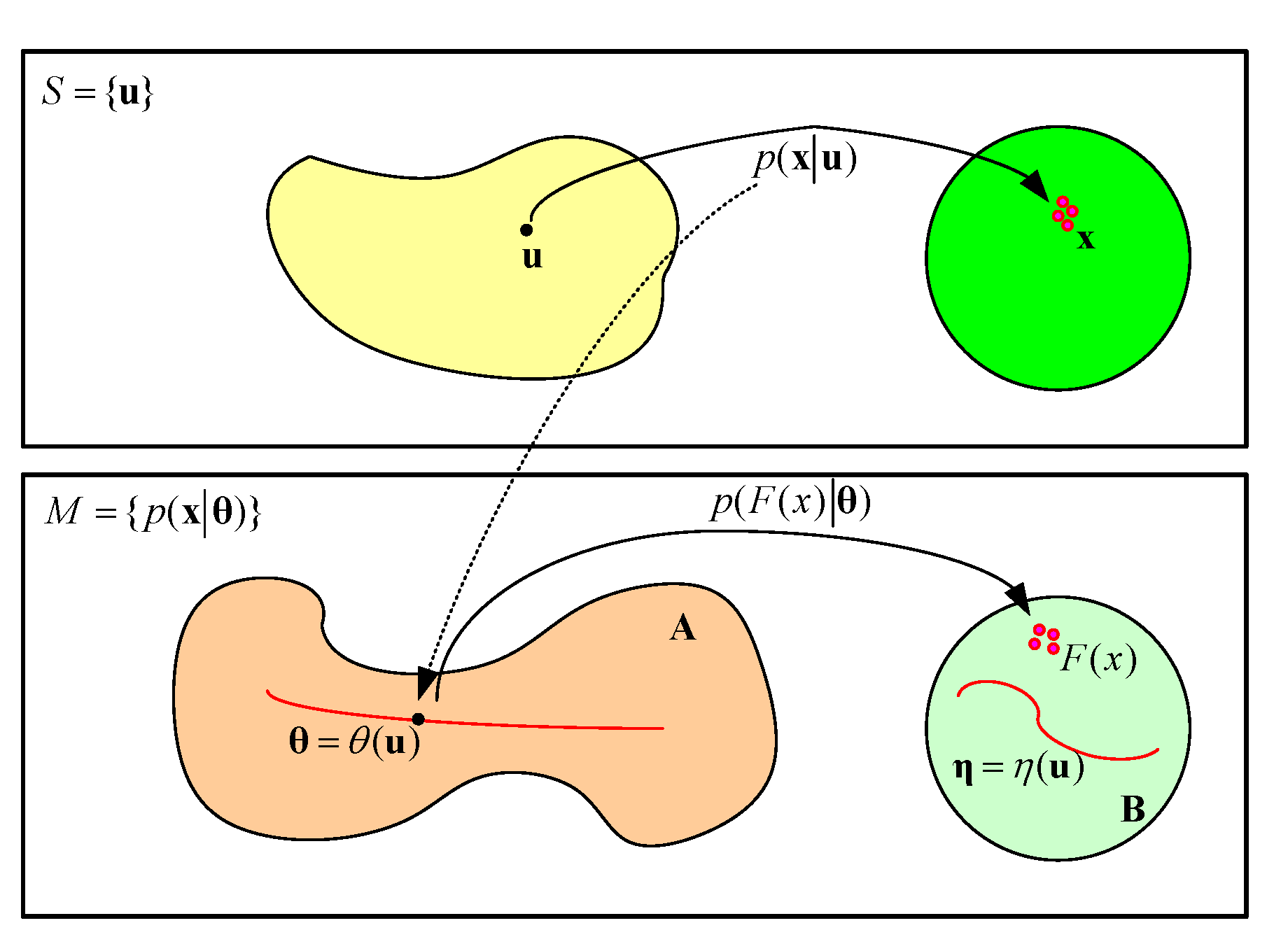
2.2. Information Geometry Probability Model
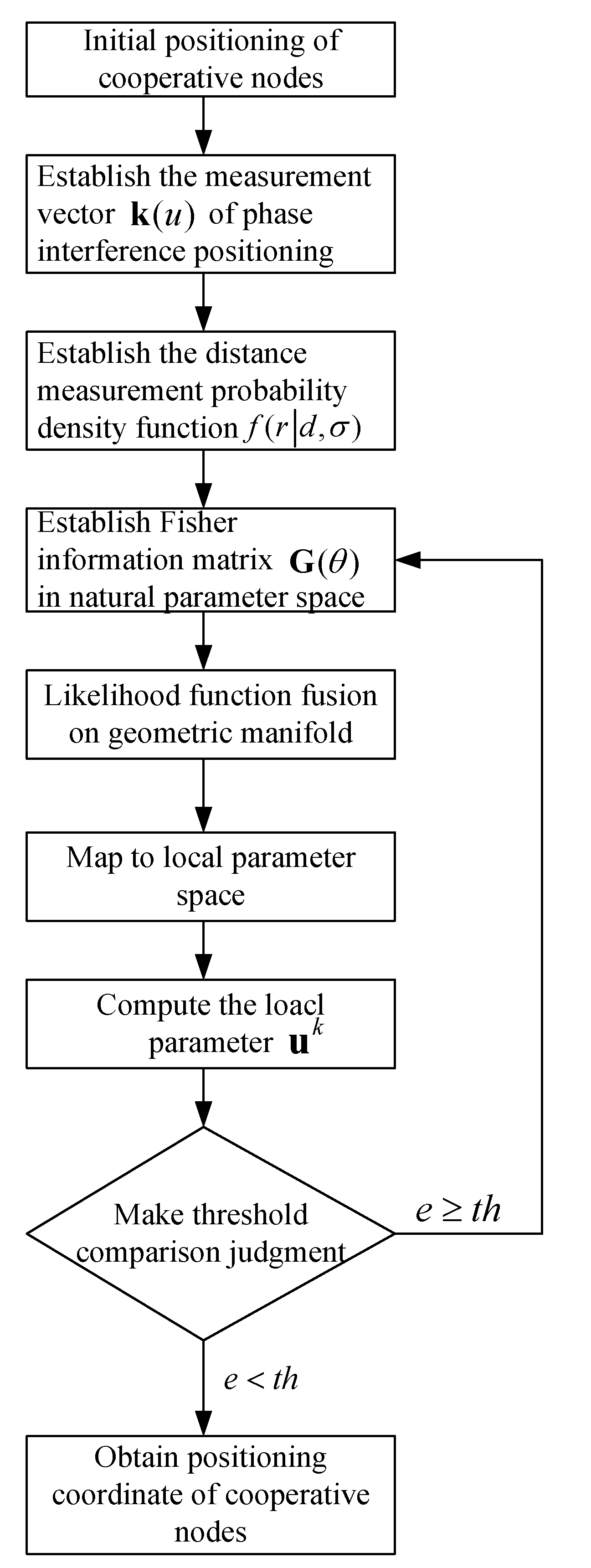
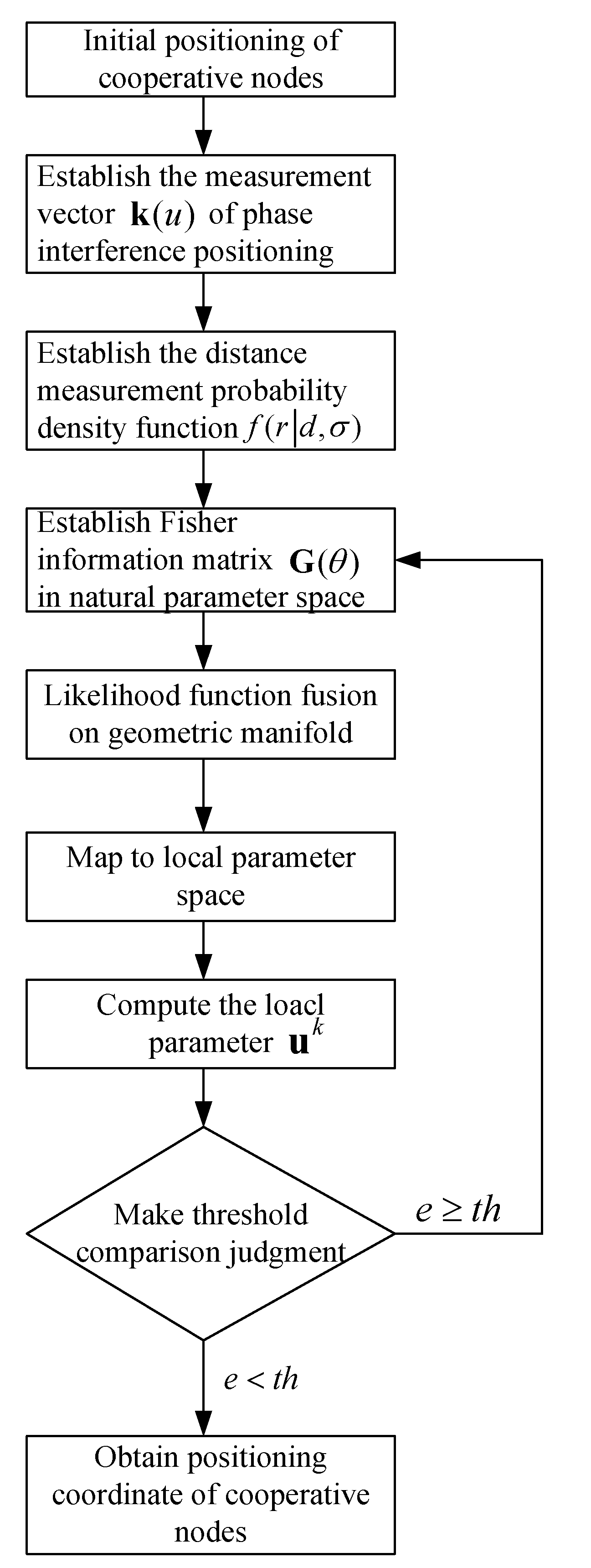
3. Information-Geometry-Assisted Cooperative Positioning (IG-CP)
4. Simulation Results and Analysis
4.1. Ideal Condition Simulation
4.2. Simulation under Different Ranging Errors
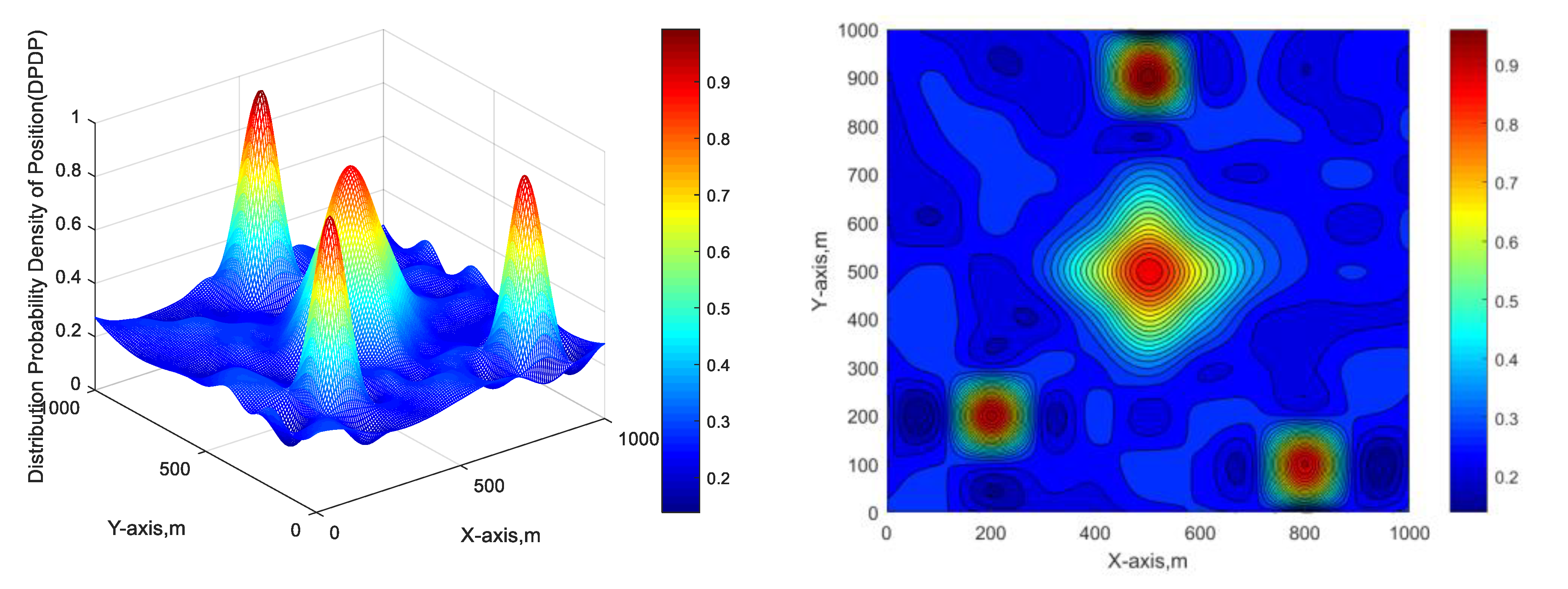
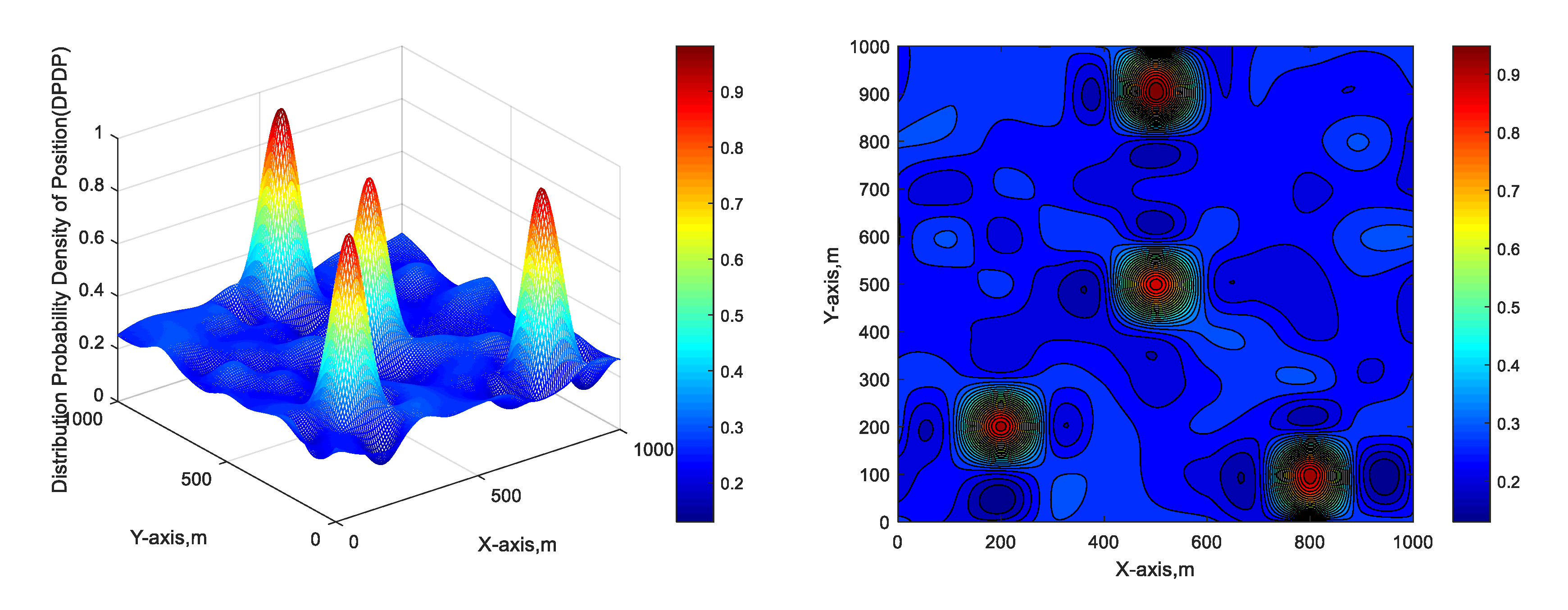
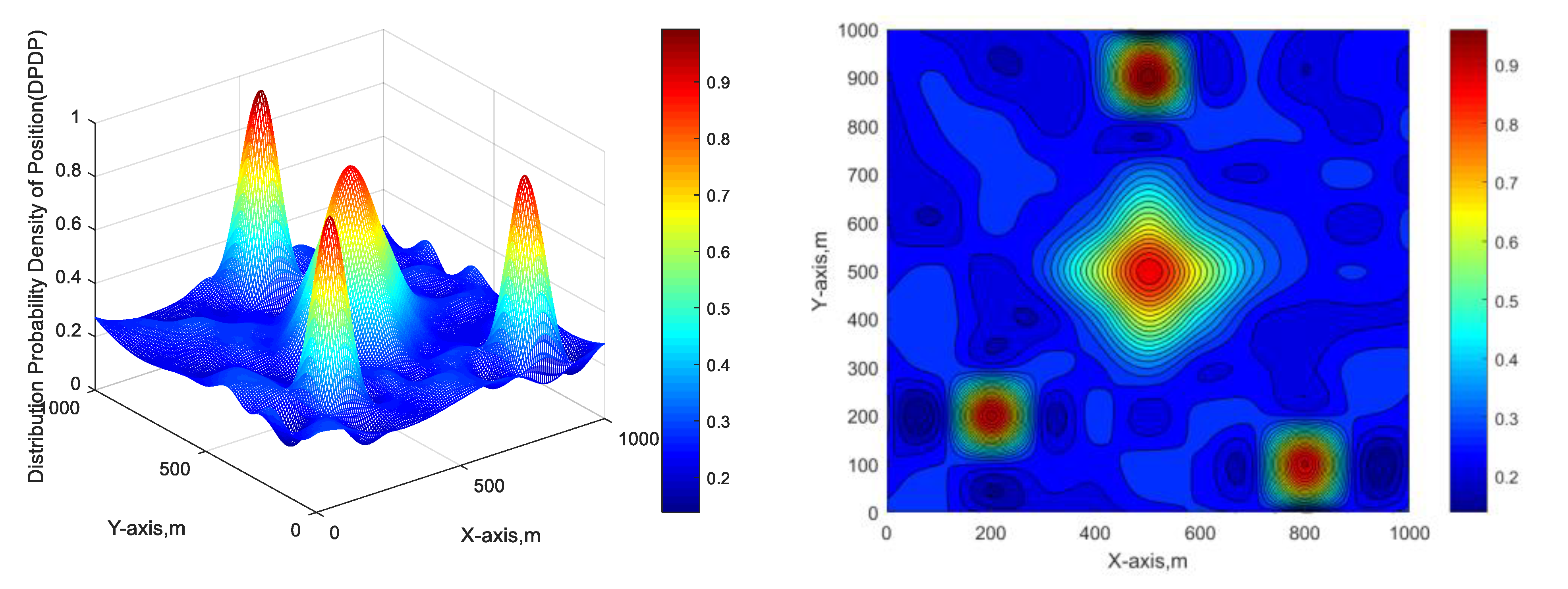
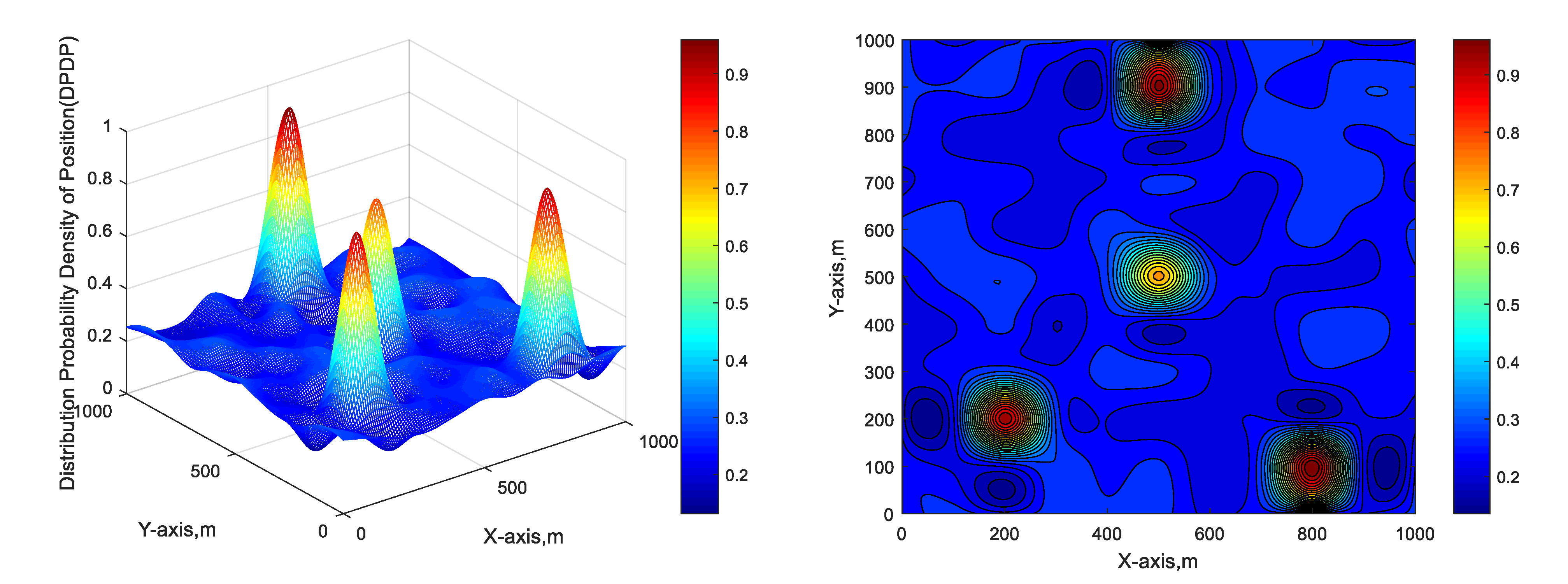
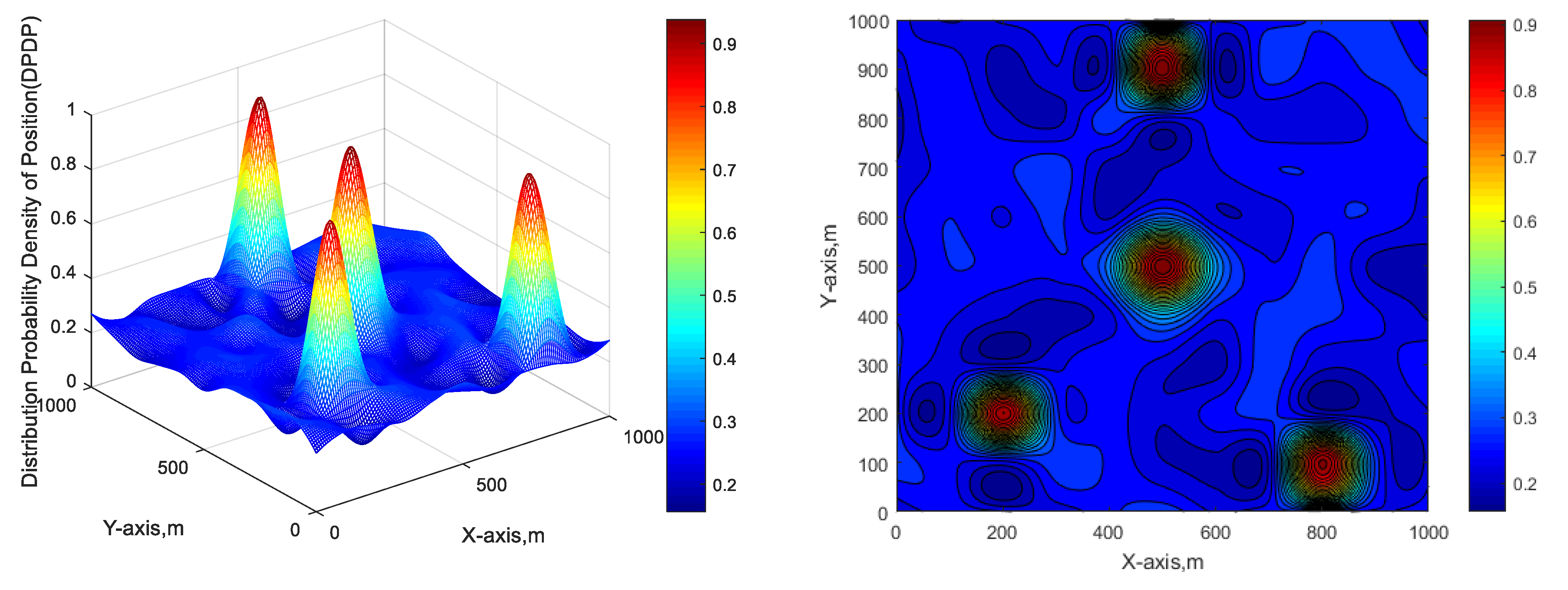
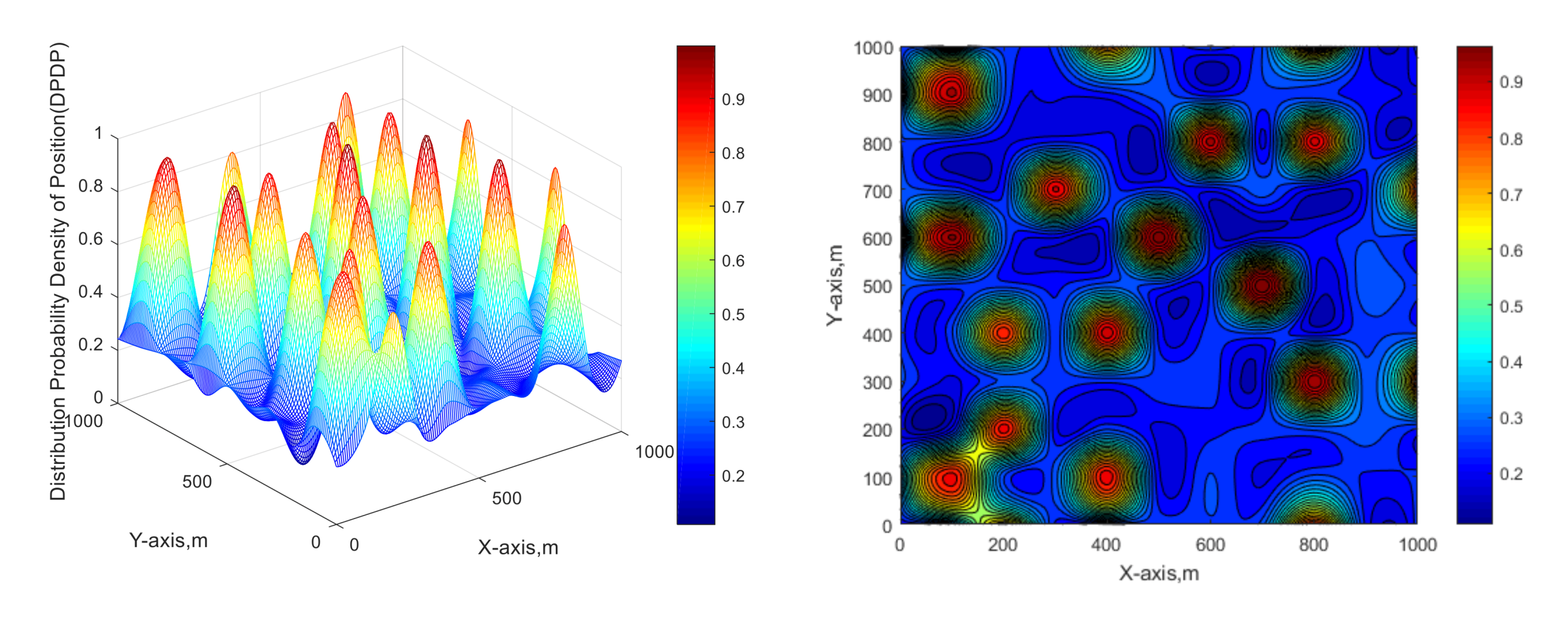
4.3. Simulation of Cooperative Positioning under Extreme Distribution
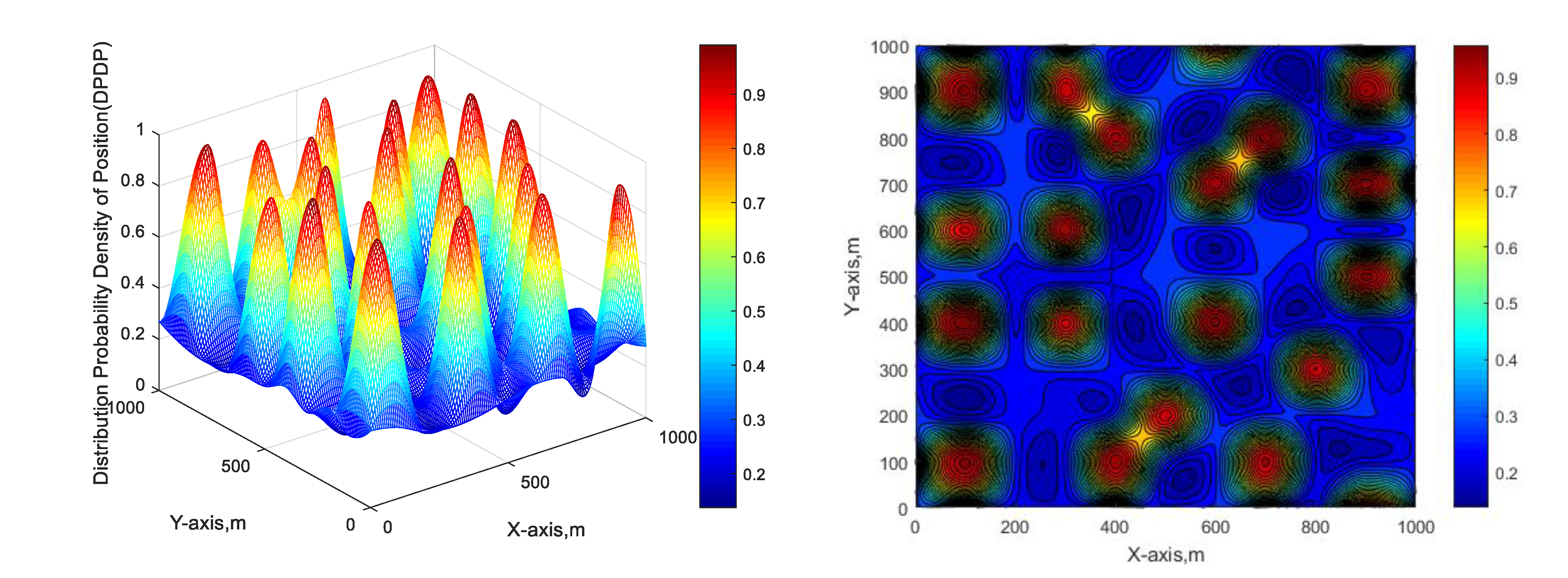
4.4. Integrated Positioning Simulation under a Multinode Network
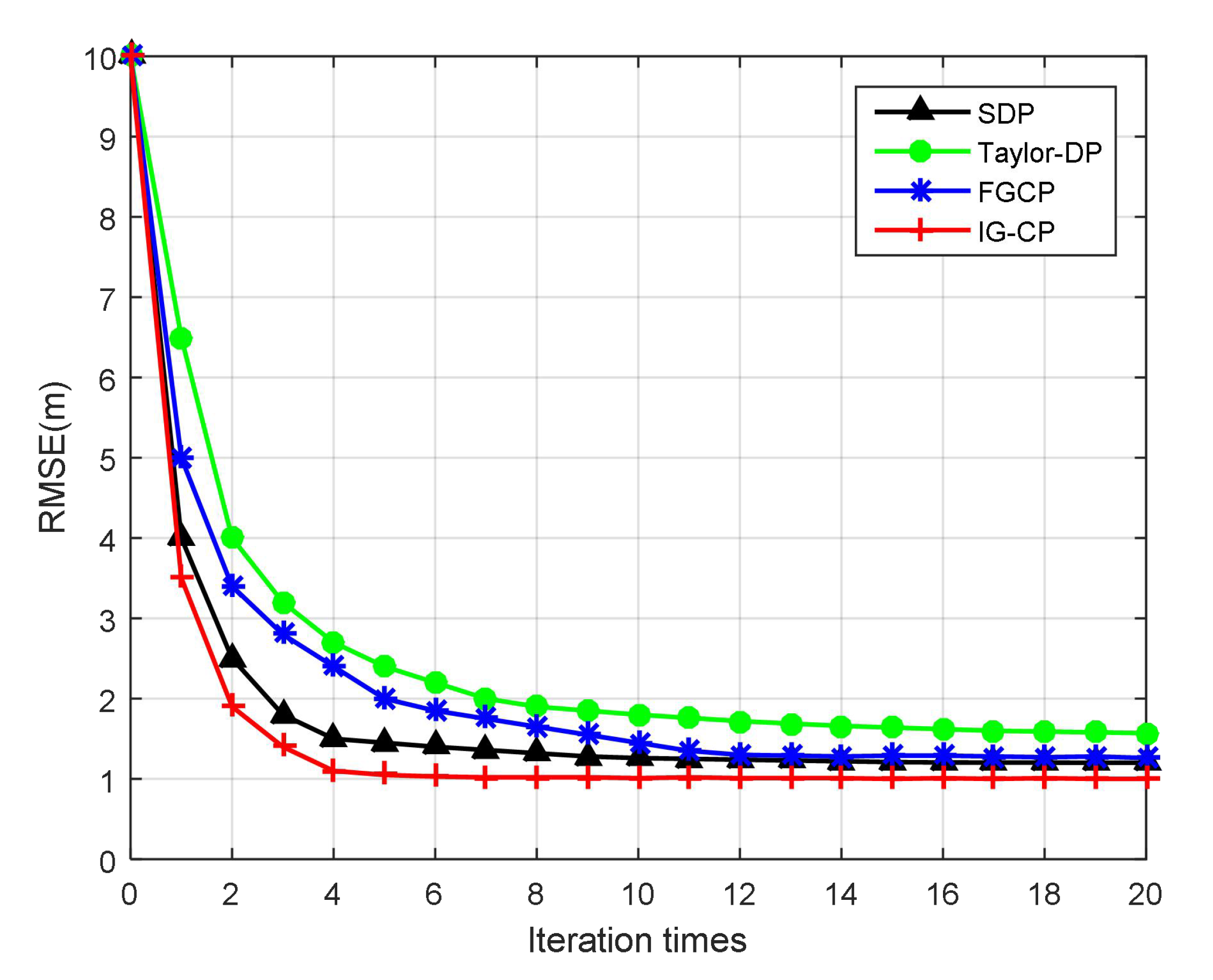
4.5. Simulation Analysis of the Convergence Rate
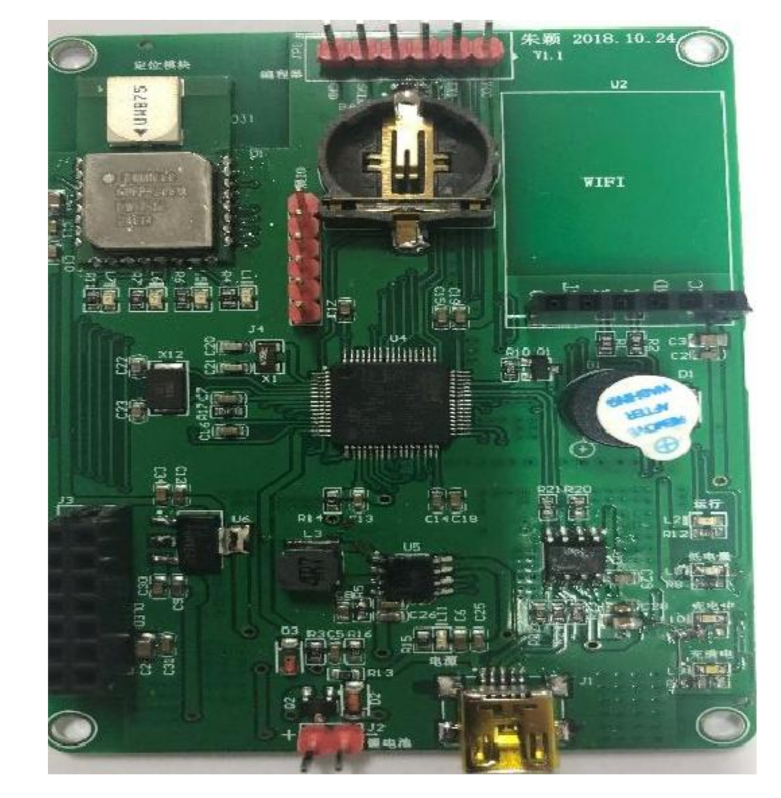
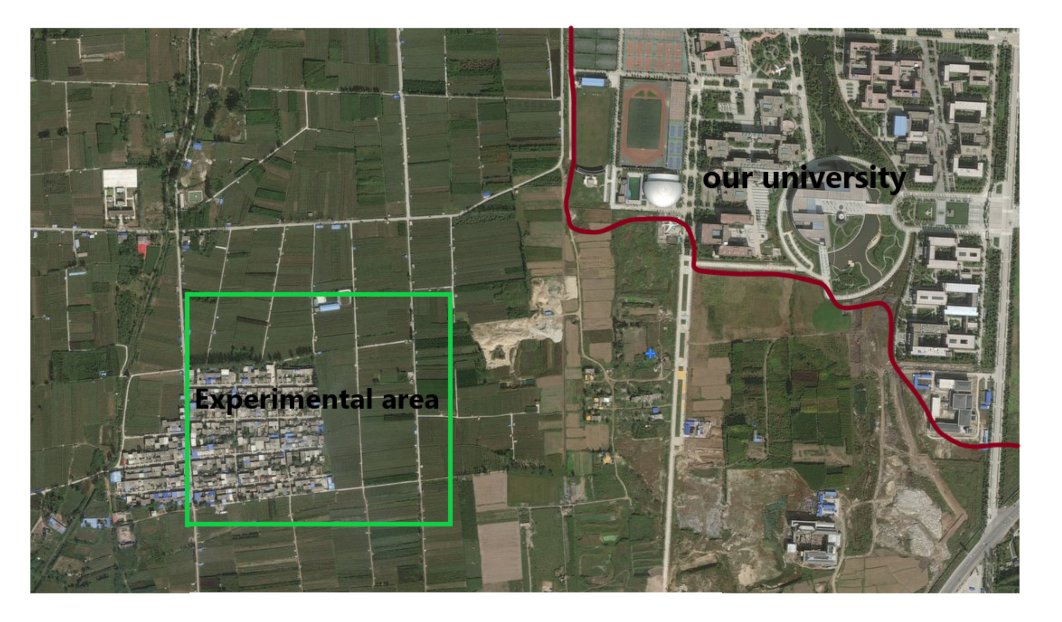
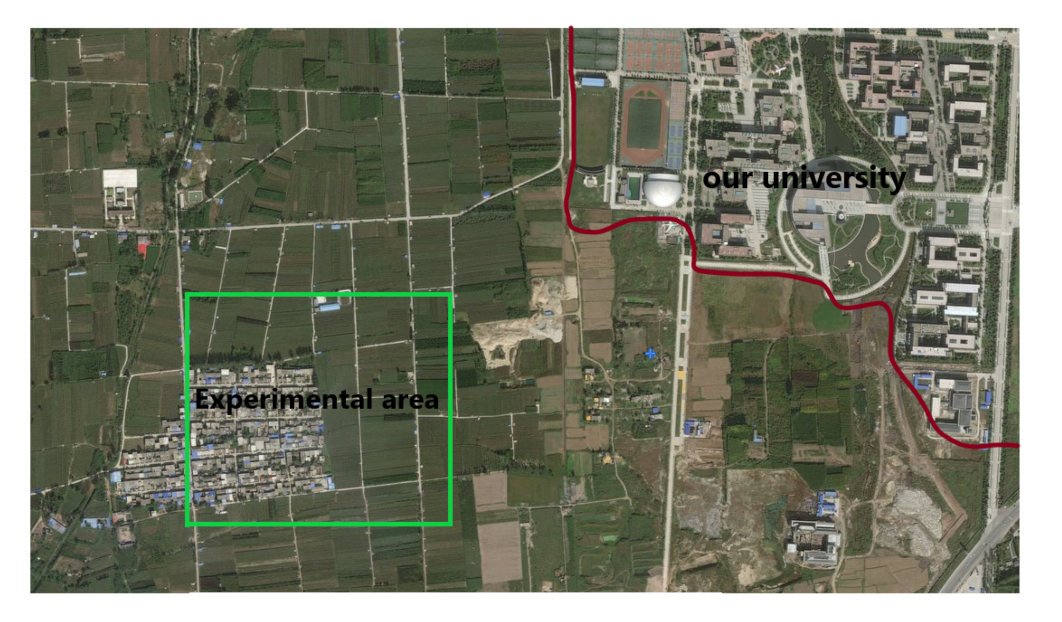
4.6. Real-Environment Test
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lal, N.; Kumar, S.; Chaurasiya, V.K. A Road Monitoring Approach with Real-Time Capturing of Events for Efficient Vehicles Safety in Smart City. Wirel. Pers. Commun. 2020, 114, 657–674. [Google Scholar] [CrossRef]
- Sultanuddin, S.J.; Ali Hussain, M. Token system-based efficient route optimization in mobile ad hoc network for vehicular ad hoc network in smart city. Trans. Emerg. Telecommun. Technol. 2020, 31, e3853. [Google Scholar] [CrossRef]
- Aujla, G.S.; Singh, M.; Bose, A.; Kumar, N.; Han, G.; Buyya, R. BlockSDN: Blockchain-as-a-Service for Software Defined Networking in Smart City Applications. IEEE Netw. 2020, 34, 83–91. [Google Scholar] [CrossRef]
- Neil, J.; Cosart, L.; Zampetti, G. Precise Timing for Vehicle Navigation in the Smart City: An Overview. IEEE Commun. Mag. 2020, 58, 54–59. [Google Scholar] [CrossRef]
- Gao, Z.; Ge, M.; Li, Y.; Shen, W.; Zhang, H.; Schuh, H. Railway Irregularity Measuring Using Rauch–Tung–Striebel Smoothed Multi-sensors Fusion System: Quad-GNSS PPP, IMU, Odometer, and Track Gauge. Gps Solut. 2018, 22, 36–53. [Google Scholar] [CrossRef]
- Paziewski, J.D.; Sieradzki, R.; Baryla, R. Multi-GNSS high-rate RTK, PPP and novel direct phase observation processing method: Application to precise dynamic displacement detection. Meas. Sci. Technol. 2018, 29, 035002. [Google Scholar] [CrossRef]
- Szot, T.; Specht, C.; Specht, M.; Dabrowski, P.S. Comparative Analysis of Positioning Accuracy of Samsung Galaxy Smartphones in Stationary Measurements. PLoS ONE 2019, 14, e0215562. [Google Scholar] [CrossRef]
- Zhu, M.; Wen, Y.Q. Design and Analysis of Collaborative Unmanned Surface-Aerial Vehicle Cruise Systems. J. Adv. Transp. 2019, 2019, 107–116. [Google Scholar] [CrossRef]
- Umemoto, K.; Endo, T.; Matsuno, F. Dynamic Cooperative Transportation Control Using Friction Forces of n Multi-Rotor Unmanned Aerial Vehicles. J. Intell. Robot. Syst. 2020, 100, 1085–1095. [Google Scholar] [CrossRef]
- Han, J.; Cho, Y.; Kim, J. Coastal SLAM with Marine Radar for USV Operation in GPS-Restricted Situations. IEEE J. Ocean. Eng. 2019, 44, 300–309. [Google Scholar] [CrossRef]
- Xiong, J.; Cheong, J.W.; Xiong, Z.; Dempster, A.G.; List, M.; Wöske, F.; Rievers, B. Carrier-Phase-Based Multi-Vehicle Cooperative Positioning Using V2V Sensors. IEEE Trans. Veh. Technol. 2020, 69, 9528–9541. [Google Scholar] [CrossRef]
- Kim, H.; Granström, K.; Gao, L.; Battistelli, G.; Kim, S.; Wymeersch, H. 5G mmWave Cooperative Positioning and Mapping Using Multi-Model PHD Filter and Map Fusion. IEEE Trans. Veh. Technol. 2020, 19, 3782–3795. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Li, G.; Lu, L.; Li, S.; Tian, S. Robust Hybrid Cooperative Positioning Via a Modified Distributed Projection-Based Method. IEEE Trans. Veh. Technol. 2020, 19, 3003–3018. [Google Scholar] [CrossRef]
- Hamie, J.; Denis, B.; Richard, C. Decentralized Positioning Algorithm for Relative Nodes Localization in Wireless Body Area Networks. Mob. Netw. Appl. 2014, 19, 1–9. [Google Scholar] [CrossRef]
- Zinas, N.; Parkins, A.; Ziebart, M. Improved network-based single-epoch ambiguity resolution using centralized GNSS network processing. Gps Solut. 2013, 17, 17–27. [Google Scholar] [CrossRef]
- Yeoman, J.; Duckham, M. International Journal of Geographical Information Science. Int. J. Geogr. Inf. Sci. 2016, 30, 993–1011. [Google Scholar] [CrossRef]
- Ayala-Garcia, D.; Curtis, A.; Branicki, M. Seismic Interferometry from Correlated Noise Sources. Remote Sens. 2021, 13, 2703. [Google Scholar] [CrossRef]
- Mathar, R.; Schmeink, M. Optimal Base Station Positioning and Channel Assignment for 3G Mobile Networks by Integer Programming. Ann. Oper. Res. 2001, 107, 225–236. [Google Scholar] [CrossRef]
- Raulefs, R.; Zhang, S.; Mensing, C. Bound-based spectrum allocation for cooperative positioning. Eur. Trans. Telecommun. 2013, 24, 69–83. [Google Scholar] [CrossRef] [Green Version]
- Fathi-Kazerooni, S.; Kaymak, Y.; Rojas-Cessa, R.; Feng, J.; Ansari, N.; Zhou, M.; Zhang, T. Optimal Positioning of Ground Base Stations in Free-Space Optical Communications for High-Speed Trains. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1940–1949. [Google Scholar] [CrossRef]
- Lv, X.W.; Liu, K.H.; Hu, P. Efficient solution of additional base stations in time-of-arrival positioning systems. Electron. Lett. 2010, 46, 861–863. [Google Scholar] [CrossRef]
- Hossain, M.A.; Elshafiey, I.; Al-Sanie, A. Cooperative vehicle positioning with multi-sensor data fusion and vehicular communications. Wirel. Netw. 2018, 25, 1403–1413. [Google Scholar] [CrossRef]
- Ghari, P.M.; Shahbazian, R.; Ghorashi, S.A. Maximum Entropy-Based Semi-Definite Programming for Wireless Sensor Network Localization. IEEE Internet Things J. 2019, 6, 3480–3491. [Google Scholar] [CrossRef]
- Wang, X.; Li, X.; Zhang, L.H.; Li, R.C. An Efficient Numerical Method for the Symmetric Positive Definite Second-Order Cone Linear Complementarity Problem. J. Sci. Comput. 2019, 79, 1608–1629. [Google Scholar] [CrossRef]
- Huang, B.; Yao, Z.; Cui, X.; Lu, M. Dilution of Precision Analysis for GNSS Collaborative Positioning. IEEE Trans. Veh. Technol. 2016, 65, 3401–3415. [Google Scholar] [CrossRef]
- Jing, H.; Pinchin, J.; Hill, C.; Moore, T. An Adaptive Weighting based on Modified DOP for Collaborative Indoor Positioning. J. Navig. 2015, 69, 1–21. [Google Scholar] [CrossRef]
- Rife, J. Collaborative Vision-Integrated Pseudorange Error Removal: Team-Estimated Differential GNSS Corrections with no Stationary Reference Receiver. IEEE Trans. Intell. Transp. Syst. 2012, 13, 15–24. [Google Scholar] [CrossRef]
- Cichon, D.; Psiuk, R.; Brauer, H.; Töpfer, H. A Hall-Sensor-Based Localization Method With Six Degrees of Freedom Using Unscented Kalman Filter. IEEE Sens. J. 2019, 19, 2509–2516. [Google Scholar] [CrossRef]
- Tang, C.; Zhang, L.; Zhang, Y.; Song, H. Factor Graph-Assisted Distributed Cooperative Positioning Algorithm in the GNSS System. Sensors 2018, 18, 3748. [Google Scholar] [CrossRef] [Green Version]
- Qi, F.; Liang, F.; Liu, M.; Lv, H.; Wang, P.; Xue, H.; Wang, J. Position-Information-Indexed Classifier for Improved Through-Wall Detection and Classification of Human Activities Using UWB Bio-Radar. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 437–441. [Google Scholar] [CrossRef]
- Jia, T.; Ho, K.C.; Wang, H.; Shen, X. Effect of Sensor Motion on Time Delay and Doppler Shift Localization: Analysis and Solution. IEEE Trans. Signal Process. 2019, 67, 5881–5899. [Google Scholar] [CrossRef]
- Song, Z.; Zhang, Y.; Lv, H.; Chen, P.; Tang, C. Electromagnetic situation generation algorithm based on information geometry. Telecommun. Syst. 2021, 77, 171–187. [Google Scholar] [CrossRef]
- Pereyra, M.; Batatia, H.; McLaughlin, S. Exploiting information geometry to improve the convergence of nonparametric active contours. In Proceedings of the 2013 5th IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), St. Martin, France, 15–18 December 2013; Volume 7, pp. 700–707. [Google Scholar]
- Garcia, D.C.; Fonseca, T.A.; Ferreira, R.U.; de Queiroz, R.L. Geometry Coding for Dynamic Voxelized Point Clouds Using Octrees and Multiple Contexts. IEEE Trans. Image Process. 2019, 29, 313–322. [Google Scholar] [CrossRef]
- Yang, T.; Jiang, Z.; Sun, R.; Cheng, N.; Feng, H. Maritime Search and Rescue Based on Group Mobile Computing for UAVs and USVs. IEEE Trans. Ind. Inform. 2020, 16, 7700–7708. [Google Scholar] [CrossRef]
- Brown, L.; Steinerberger, S. On the Wasserstein distance between classical sequences and the Lebesgue measure. Trans. Am. Math. Soc. 2020, 373, 8943–8962. [Google Scholar] [CrossRef]
- Yu, Z.; Mo, H.; Zhang, J.; Ma, Y.; Chen, J. Research on location filtering algorithm of DWM1000 in UAV cluster. Wirel. Internet Technol. 2019, 19, 178–189. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| the positioning sampling data | |
| the position coordinate vector of the cooperative node | |
| S | statistical manifold |
| likelihood function | |
| the natural parameter | |
| expectation parameter | |
| the expected parameter space | |
| the natural parameter space | |
| sufficient statistics of the positioning information data | |
| the distance measurement error | |
| the distance measurement error vector | |
| resents the variance | |
| n | the position error |
| r | the distance measurement |
| the probability density measurement function | |
| the logarithmic likelihood function | |
| the Fisher information matrix | |
| the distance measurement components on the x-axis | |
| the distance measurement components on the y-axis |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, C.; Wang, C.; Zhang, L.; Zhang, Y.; Song, H. Geometric-Manifold-Assisted Distributed Navigation Probabilistic Information Fusion Cooperative Positioning Algorithm. Remote Sens. 2021, 13, 4987. https://doi.org/10.3390/rs13244987
Tang C, Wang C, Zhang L, Zhang Y, Song H. Geometric-Manifold-Assisted Distributed Navigation Probabilistic Information Fusion Cooperative Positioning Algorithm. Remote Sensing. 2021; 13(24):4987. https://doi.org/10.3390/rs13244987
Chicago/Turabian StyleTang, Chengkai, Chen Wang, Lingling Zhang, Yi Zhang, and Houbing Song. 2021. "Geometric-Manifold-Assisted Distributed Navigation Probabilistic Information Fusion Cooperative Positioning Algorithm" Remote Sensing 13, no. 24: 4987. https://doi.org/10.3390/rs13244987
APA StyleTang, C., Wang, C., Zhang, L., Zhang, Y., & Song, H. (2021). Geometric-Manifold-Assisted Distributed Navigation Probabilistic Information Fusion Cooperative Positioning Algorithm. Remote Sensing, 13(24), 4987. https://doi.org/10.3390/rs13244987