
Maritime Multiple Moving Target Detection Using Multiple-BDS-Based Radar: Doppler Phase Compensation and Resolution Improvement





Abstract
:1. Introduction
2. Detection Model and Existing Problems
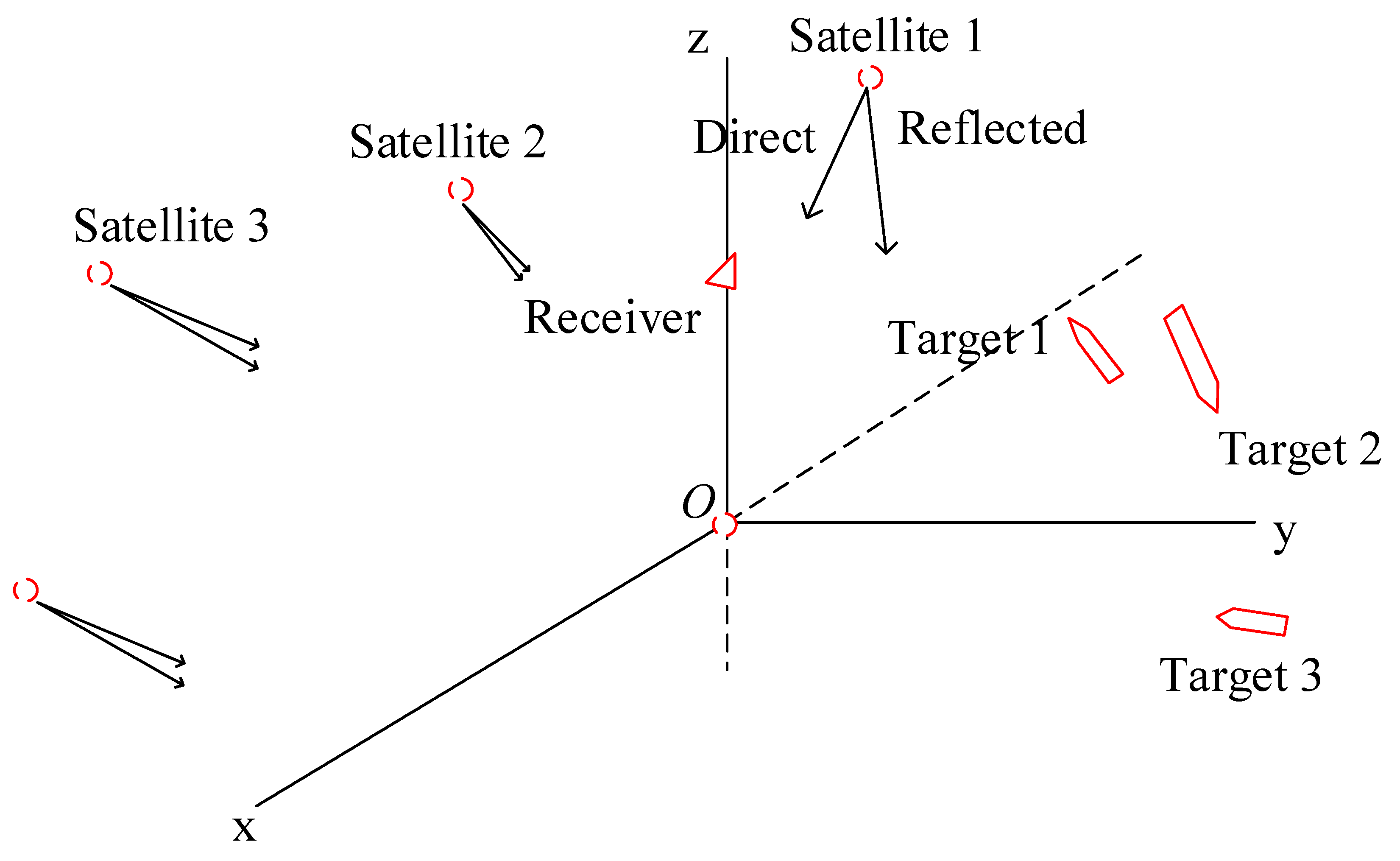
2.1. Detection Model
2.2. Signal Structure
2.3. Existing Problems
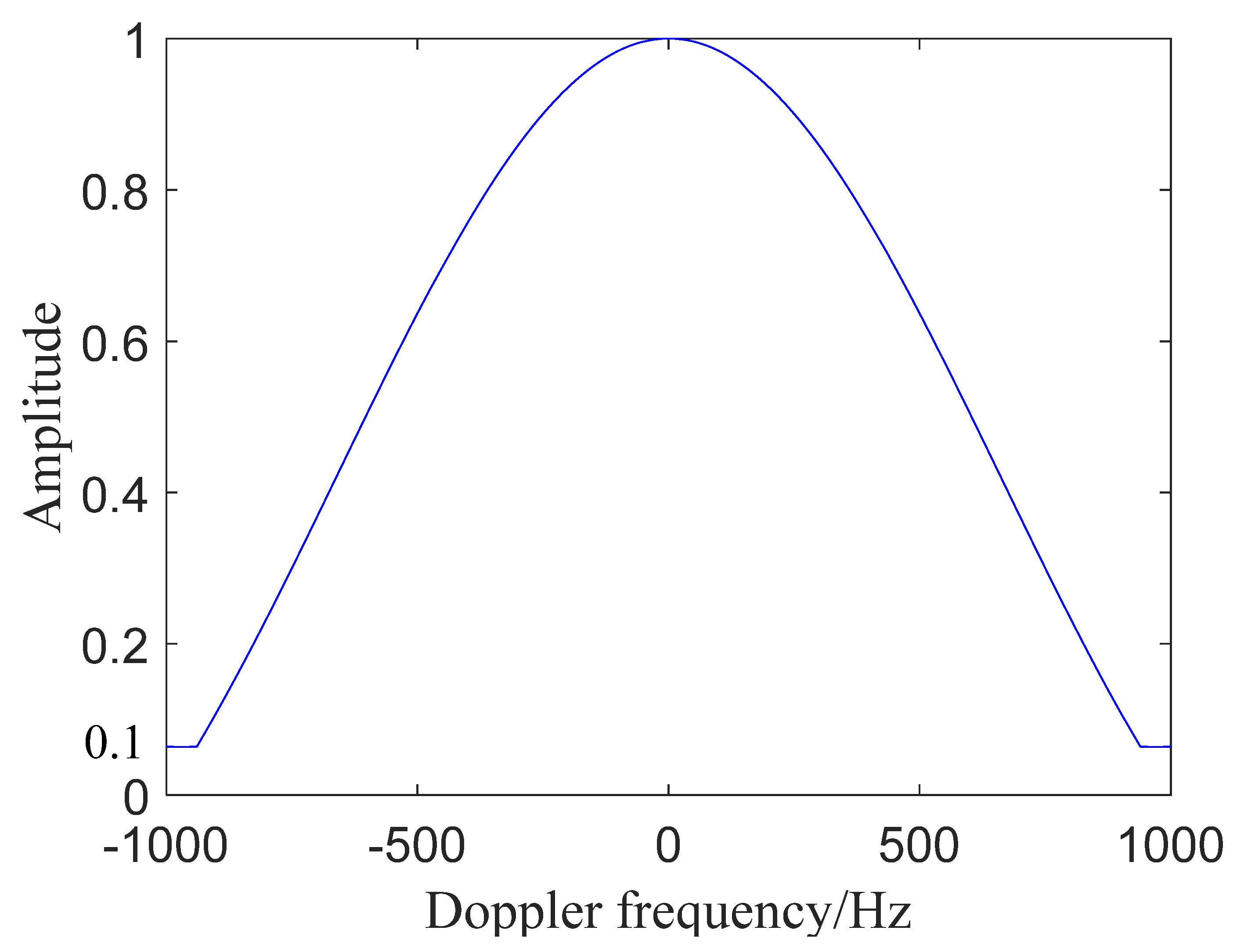
- First, the satellites and receiver are moving fast, which will produce a large Doppler frequency. With different dual-station angle of targets, the Doppler frequencies among the targets shows big differences, which weakened target detection peaks to varying degrees. A Doppler compensation method should be given to restore and unify the target peaks.
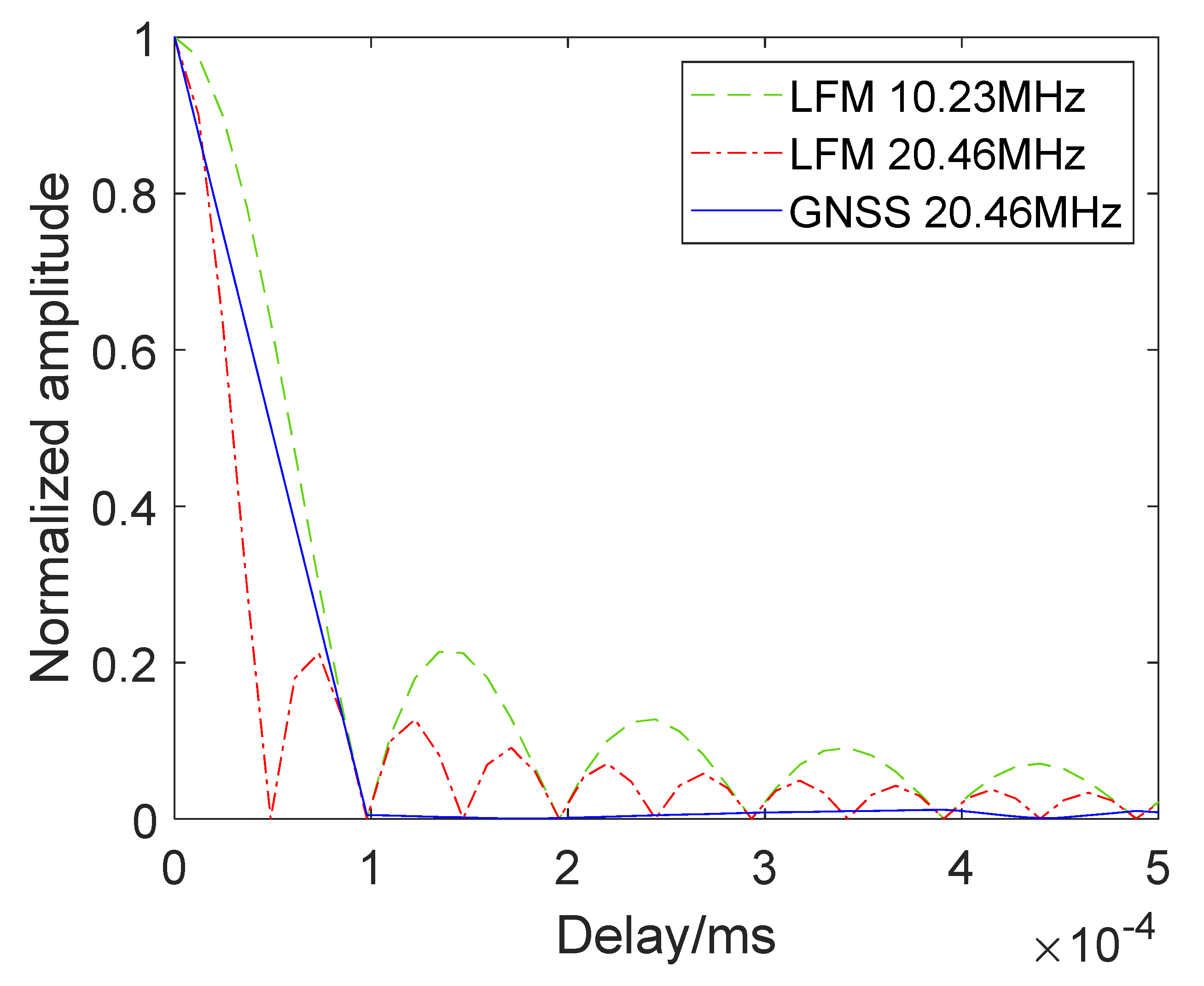
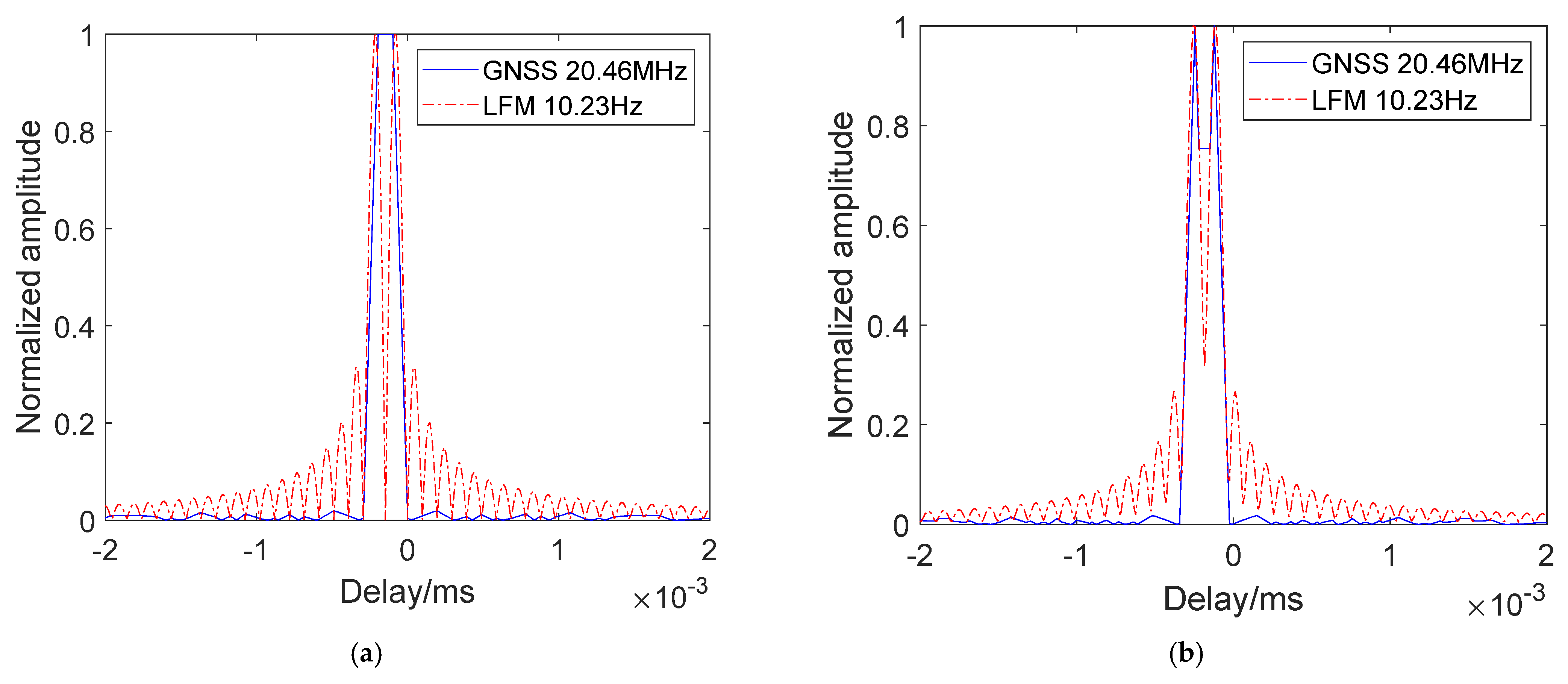
- Second, since the BDS signal was not devised for GNSS-R detection, its range resolution is not sufficient to detect ship targets well. Further RCS distribution information of targets needs to be detected for target recognition.
3. Methods
3.1. Multiple Targets Detection Doppler Compensation
3.2. Resolution Study and Peaks Identifying Methods
3.3. Resolution Study and Range Inversion Methods
3.4. Target Information Inversion Method Based on GNSS-R Detection
3.5. Experimental Technical Scheme
4. Simulation Results and Discussion
4.1. Simulation 1
4.2. Simulation 2
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ansari, K.; Bae, T.S.; Seok, H.W.; Kim, M.S. Multiconstellation global navigation satellite systems signal analysis over the Asia-Pacific region. Int. J. Satell. Commun. Netw. 2020, 39, 280–293. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Southwell, B.J.; Dempster, A.G. Incoherent Range Walk Compensation for Spaceborne GNSS-R Imaging. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2535–2542. [Google Scholar] [CrossRef]
- Huang, F.X.; Garrison, J.L.; Leidner, S.M.; Annane, B.; Hoffman, R.N.; Grieco, G.; Stoffelen, A. A Forward Model for Data Assimilation of GNSS Ocean Reflectometry Delay-Doppler Maps. IEEE Trans. Geosci. Remote Sens. 2021, 59, 2643–2656. [Google Scholar] [CrossRef]
- Giangregorio, G.; Bisceglie, M.D.; Addabbo, P. Stochastic Modeling and Simulation of Delay–Doppler Maps in GNSS-R Over the Ocean. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2056–2069. [Google Scholar] [CrossRef]
- Martin, F.; Camps, A.; Park, H.; DaAddio, S.; Martín-Neira, M.; Pascual, D. Cross-correlation waveform analysis for conventional and interferometric GNSS-R approaches. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 1560–1572. [Google Scholar] [CrossRef]
- Martin, F.; D′Addio, S.; Camps, A.; Martín-Neira, M. Modeling and analysis of GNSS-R waveforms sample-to-sample correlation. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 1545–1559. [Google Scholar] [CrossRef]
- Xiao, X.; Shen, F.; Lu, X.C.; Shen, P.L.; Ge, Y.L. Performance of BDS-2/3, GPS, and Galileo Time Transfer with Real-Time Single-Frequency Precise Point Positioning. Remote Sens. 2020, 13, 4192. [Google Scholar] [CrossRef]
- Zhang, P.F.; Tui, R.; Zhang, R.; Liu, N.; Gao, Y. Time and frequency transfer using BDS-2 and BDS-3 carrier-phase observations. IET Radar Sonar Navig. 2019, 13, 1249–1255. [Google Scholar] [CrossRef]
- Feng, Z.; Li, X.-H.; Zhang, H.-J.; Huang, L.-X.; Xu, L.-X. Timing performance evaluation of BDS IGSO-6 and GEO-7 satellite Network. In Proceedings of the Joint Conference of the European Frequency and Time Forum and IEEE International Frequency Control Symposium (EFTF/IFCS), Besancon, France, 9–13 July 2017; pp. 817–820. [Google Scholar]
- Tu, R.; Zhang, R.; Liu, Z.K. Real-time detection of BDS orbit manoeuvres based on the combination of GPS and BDS observations. IET Radar Sonar Navig. 2020, 14, 1603–1609. [Google Scholar] [CrossRef]
- Pei, T.D.; Pan, W.; Liu, Y. Research on BDS/GPS dual-mode single point positioning. In Proceedings of the Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 1163–1168. [Google Scholar]
- Li, Z.Y.; Huang, C.; Wu, J.; Yang, H.; Yang, J. Over view of maritime target detection techniques using GNSS-Based passive radar (in Chinese). Radar Sci. Technol. 2020, 18, 404–413. [Google Scholar]
- Ma, H.; Antoniou, M.; Pastina, D.; Santi, F.; Pieralice, F.; Bucciarelli, M.; Cherniakov, M. Maritime Moving Target Indication Using Passive GNSS-Based Bistatic Radar. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 115–128. [Google Scholar] [CrossRef]
- Beltramonte, T.; Braca, P.; Bisceglie, M.D.; Di Simone, A.; Galdi, C.; Iodice, A.; Millefiori, L.M.; Riccio, D.; Willett, P.K. Simulation-Based Feasibility Analysis of Ship Detection Using GNSS-R Delay-Doppler Maps. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 1385–1399. [Google Scholar] [CrossRef]
- Sun, X.Y.; Xu, L.Z.; Ji, Y.F. An Extremum Approximation ARAIM Algorithm Based on GPS and BDS. IEEE Access 2020, 8, 30027–30036. [Google Scholar] [CrossRef]
- Qin, H.; Liu, P.; Cong, L.; Ji, W. Triple-Frequency Combining Observation Models and Performance in Precise Point Positioning Using Real BDS Data. IEEE Access 2019, 7, 69826–69836. [Google Scholar] [CrossRef]
- Liu, G.J.; Guo, J. Real-time determination of a bds satellite’s velocity using the broadcast ephemeris. In Proceedings of the Fourth International Conference on Instrumentation and Measurement, Computer, Communication and Control, Harbin, China, 18–20 September 2014; pp. 478–483. [Google Scholar]
- Zhang, B.Q. Research on GPS/BDS single point velocity measurement considering direction constraints. In Proceedings of the IEEE 8th Data Driven Control and Learning System Conference, Dali, China, 24–27 May 2019; pp. 982–986. [Google Scholar]
- Ding, W.D.; Wang, J.L. Precise velocity estimation with s stand-alone GPS receiver. J. Navig. 2011, 64, 311–325. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.K.; Wang, J.C.; Zeng, H.C.; Pei, Z.C. Experimental results for GNSS-R based moving target indication. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Waikoloa, HI, USA, 26 September–2 October 2020; pp. 2819–2822. [Google Scholar]
- Park, H.; Camps, A.; Valencia, E.; Carreno-Luengo, H.; Martin, F.; Alonso, A.; Pascual, D. Analysis of gnss-r delay and doppler tracking errors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1481–1492. [Google Scholar] [CrossRef]
- Ji, W.X.; Xiu, C.D.; Li, W.Q.; Wang, L.J. Ocean surface target detection and positioning using the spaceborne GNSS-R delay-Doppler maps. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 3806–3809. [Google Scholar]
- Cheong, J.W.; Southwell, B.J.; Dempster, A.G. Blind sea clutter suppression for spaceborne GNSS-R target detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 5373–5378. [Google Scholar] [CrossRef]
- Simone, A.D.; Park, H.; Riccio, D.; Camps, A. Sea target detection using spaceborne gnss-r delay-doppler maps theory and experimental proof of concept using TDS-1 data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4237–4255. [Google Scholar] [CrossRef]
- Hu, C.J.; Benson, C.; Park, H.; Camps, A.; Qiao, L.; Rizos, C. Analyzing anomalous artefacts in TDS-1 delay doppler maps. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Yokohama, Japan, 28 July–2 August 2019; pp. 8366–8369. [Google Scholar]
- Open Service Signal B3I (Version 1.0). Available online: http://www.beidou.gov.cn/xt/gfxz/201802/P020180209620480385743.pdf (accessed on 1 January 2021).
- Open Service Signal B1I (Version 1.0). Available online: http://www.beidou.gov.cn/xt/gfxz/201902/P020190227592987952674.pdf (accessed on 1 January 2021).
- Test and Assessment Research Center of China Satellite Navigation Office. Available online: http://www.csno-tarc.cn/datacenter/ephemeris (accessed on 1 January 2021).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signals | B3I | |
|---|---|---|
| Bandwidth (B)/MHz | 20.46 | |
| Carrier frequency /Hz | ||
| Satellite1 PRN | 19 | |
| Satellite2 PRN | 26 | |
| Satellite3 PRN | 21 | |
| Satellite4 PRN | 22 | |
| Receiver label/km | (0, 0, 6.5) | |
| Receiver velocity/m/s | 250 | |
| Receiver velocity angle | ||
| Simulation serial number | 1 | 2 |
| Accumulation time/s | 0.128 | 10 |
| Simulation 1 Point | r/km | v/m/s | Interval/m | Number | ||
|---|---|---|---|---|---|---|
| Target 1 | 1 | 15 | 30 | 1 | ||
| Target 2 | 1.5 | 20 | 30 | 5 | ||
| Target 3 | 2 | 20 | 30 | 3 | ||
| Simulation 2 Ship | r/km | v/m/s | Length/Width(m) | |||
| Target 1 | 1 | 15 | 141/20 | |||
| Target 2 | 1.5 | 20 | 314.6/40.8 | |||
| Target 3 | 2 | 20 | 142/18 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lan, X.; Wang, L.; Li, J.; Jiang, W.; Zhang, M. Maritime Multiple Moving Target Detection Using Multiple-BDS-Based Radar: Doppler Phase Compensation and Resolution Improvement. Remote Sens. 2021, 13, 4963. https://doi.org/10.3390/rs13244963
Lan X, Wang L, Li J, Jiang W, Zhang M. Maritime Multiple Moving Target Detection Using Multiple-BDS-Based Radar: Doppler Phase Compensation and Resolution Improvement. Remote Sensing. 2021; 13(24):4963. https://doi.org/10.3390/rs13244963
Chicago/Turabian StyleLan, Xiang, Liuying Wang, Jinxing Li, Wangqiang Jiang, and Min Zhang. 2021. "Maritime Multiple Moving Target Detection Using Multiple-BDS-Based Radar: Doppler Phase Compensation and Resolution Improvement" Remote Sensing 13, no. 24: 4963. https://doi.org/10.3390/rs13244963
APA StyleLan, X., Wang, L., Li, J., Jiang, W., & Zhang, M. (2021). Maritime Multiple Moving Target Detection Using Multiple-BDS-Based Radar: Doppler Phase Compensation and Resolution Improvement. Remote Sensing, 13(24), 4963. https://doi.org/10.3390/rs13244963