2.1. Description of Research Object
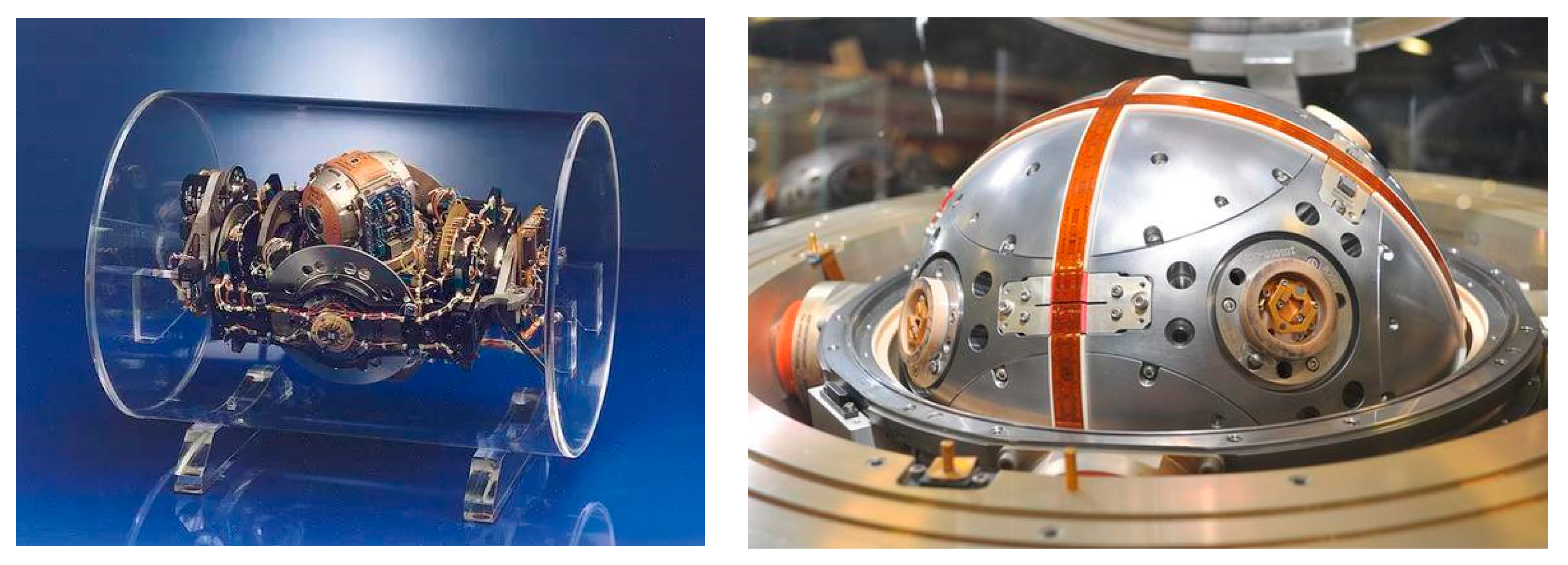
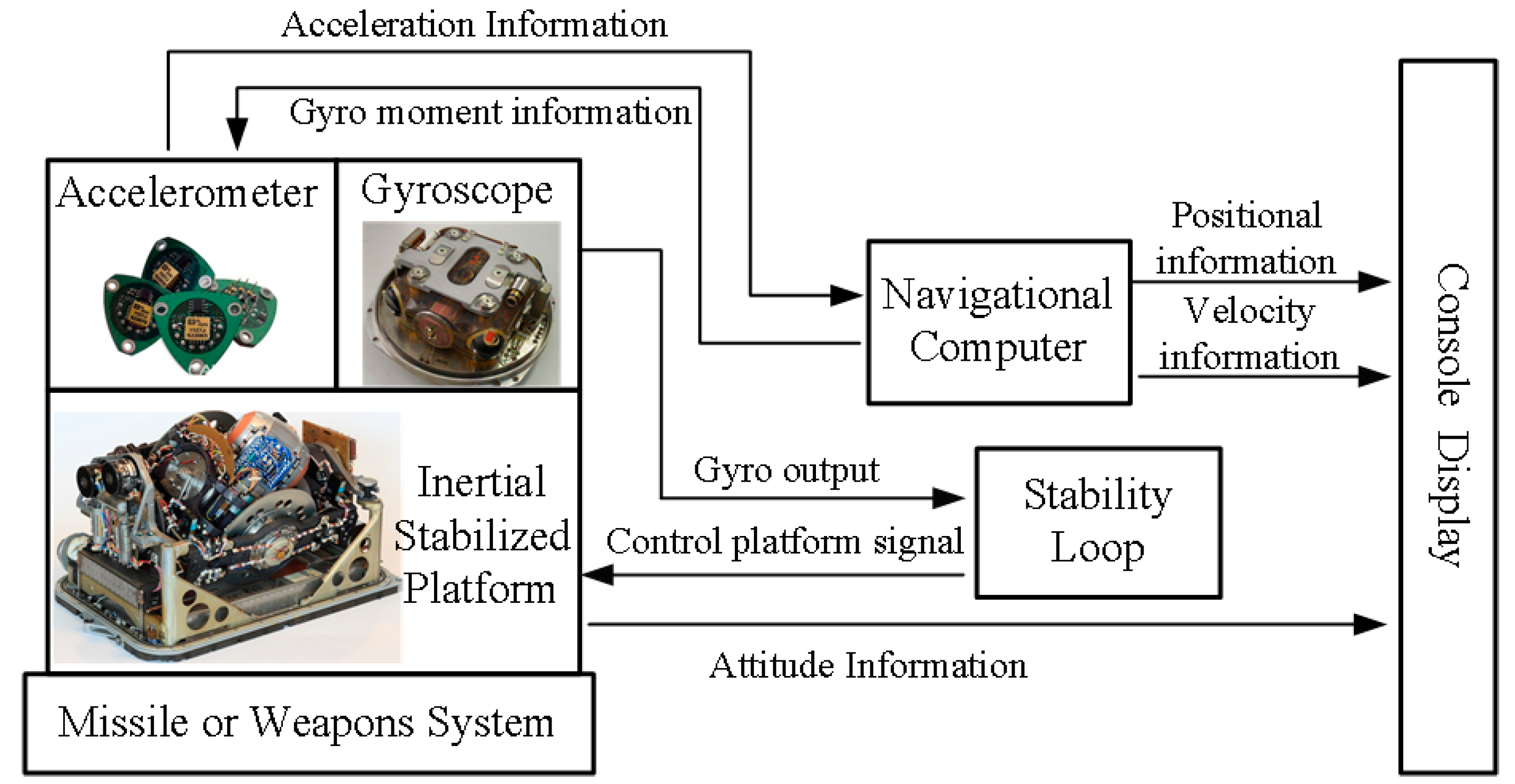
Inertial platform is the core component of a remote sensing system, which is composed of platform, gyroscope, frame, torque motor and other parts. The inertial coordinate system benchmark is provided by the platform stability system [
3,
27]. The structure diagram of the platform inertial navigation system is shown in
Figure 2.
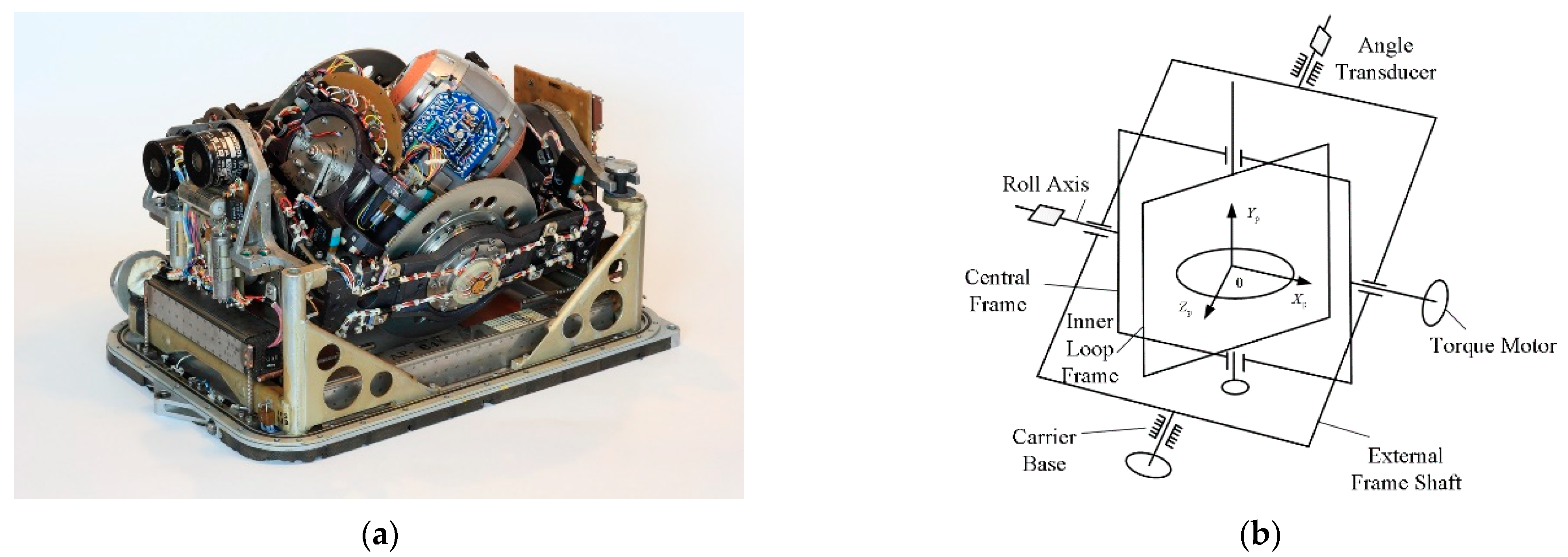
The inertial platform is shown in
Figure 3a, and its frame structure is shown in
Figure 3b, which is composed of an angle transducer, a roll axis, a central frame, an inner loop frame, a torque motor, a carrier base and an external frame shaft. The inertial platform can continuously turn around the external frame shaft, the inner loop frame and the central frame. These rotations will be detected by the gyroscope and converted into electrical signals. Through signal processing, the torque in the opposite direction of the interference torque will be generated by the torque electricity, so as to stabilize the inertial platform in the inertial space [
3,
28].
The inertial platform is on long-term storage before service. Usually, affected by environmental factors and maintenance management factors, the performance of inertial platform decreases with the extension of service time, which results in abnormal function, low precision, and increased failure rate.
The performance failure of an inertial platform system mainly refers to the lack of measurement accuracy, and the error is the main factor affecting the accuracy. Errors of an inertial platform during storage are calculated by periodic detection, and the performance of an inertial platform is reflected by error. Error sources of an inertial platform system include zero bias of the accelerometer, gyro drift rate, scale factor error, installation error, initial posture of the platform, error of the initial position, error of the benchmark measurement equipment itself and so on [
29]. Among these errors, uncompensated platform drift error is the main factor determining accuracy error. Gyro drift is a slow change in the initial zero or reference and accumulates along with time. Gyro drift affects the accuracy of the inertial platform system seriously, which causes abnormal function and system failure. According to the different properties of drift, it can be divided into constant drift and random drift [
14]. Constant drift is characterized by the mean value of multiple measurements under the same conditions. Random drift is related to environmental factors such as temperature and vibration, which reflects the uncertainty of drift error.
Therefore, the drift rate of an inertial platform can be directly used as a characteristic parameter to measure the health status of the system. In the regular examination of an inertial platform, the drift error is calculated with each inspection. Because the inertial platform is very expensive and has limited life, its periodic examination is limited by many factors, which causes the sample size of drift rate data is very small. The analysis and prediction of drift rate can directly reflect the performance change trend of an inertial platform. When the drift rate is higher than a certain value, the accuracy of the inertial platform will not meet the use requirements, so the inertial platform needs to be repaired or retired.
2.2. The Prediction Model Based on Slide Window and Grey Neural Network
Due to the drift rate data is very small, in order to obtain more information, it is necessary to combine multiple models. In this paper, the grey model is applied to obtain trend information from small sample data [
19,
22]. The neural network model is applied to obtain nonlinear information. Considering the different influence of future drift rate and historical drift rate, sliding windows are added to improve the prediction accuracy furtherly.
The grey neural network includes four fusion types: series type, parallel type, embedded type and hybrid type [
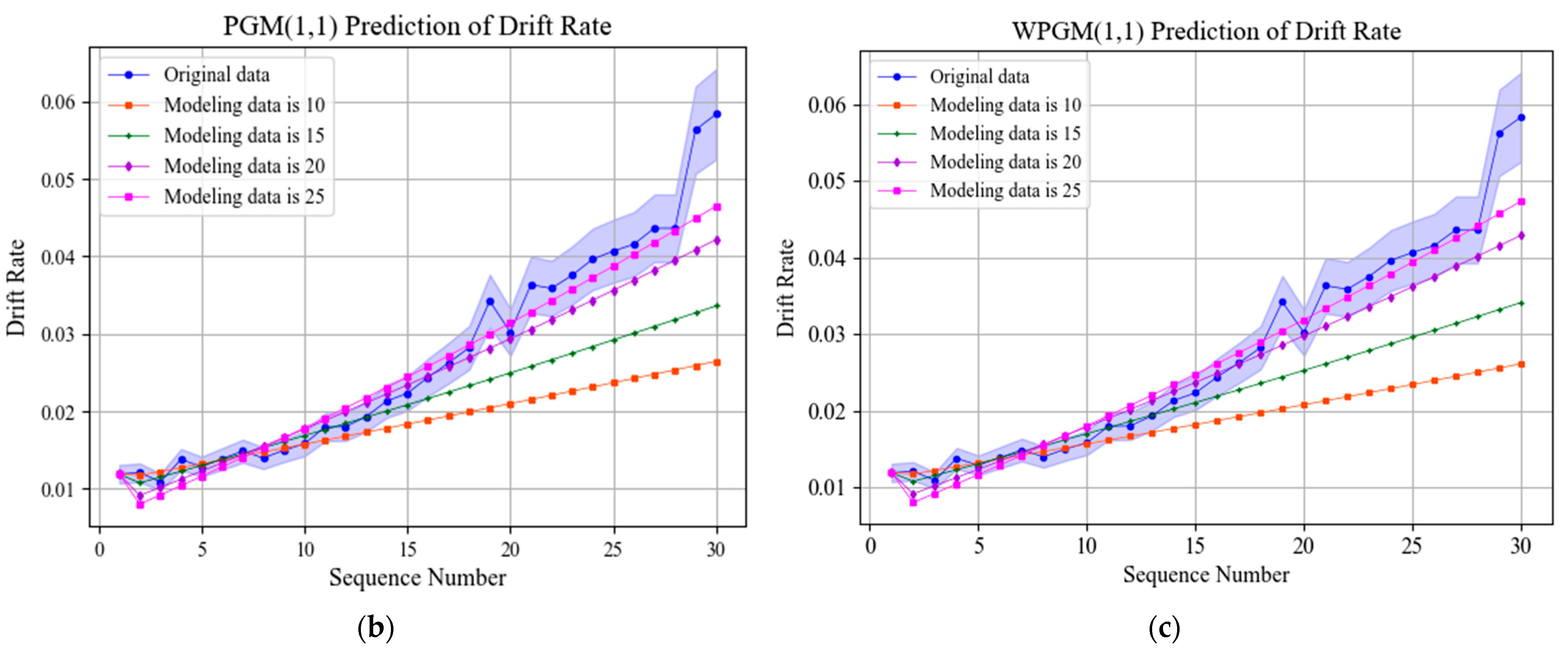
30]. In this paper, the series type of a grey neural network is applied. Due to the limitations of the ordinary grey model (GM), relevant researchers proposed the correction methods of parameters in the grey model. Two typical improved grey models are unbiased grey model (PGM) [
31,
32] and weighted unbiased grey model (WPGM) [
33,
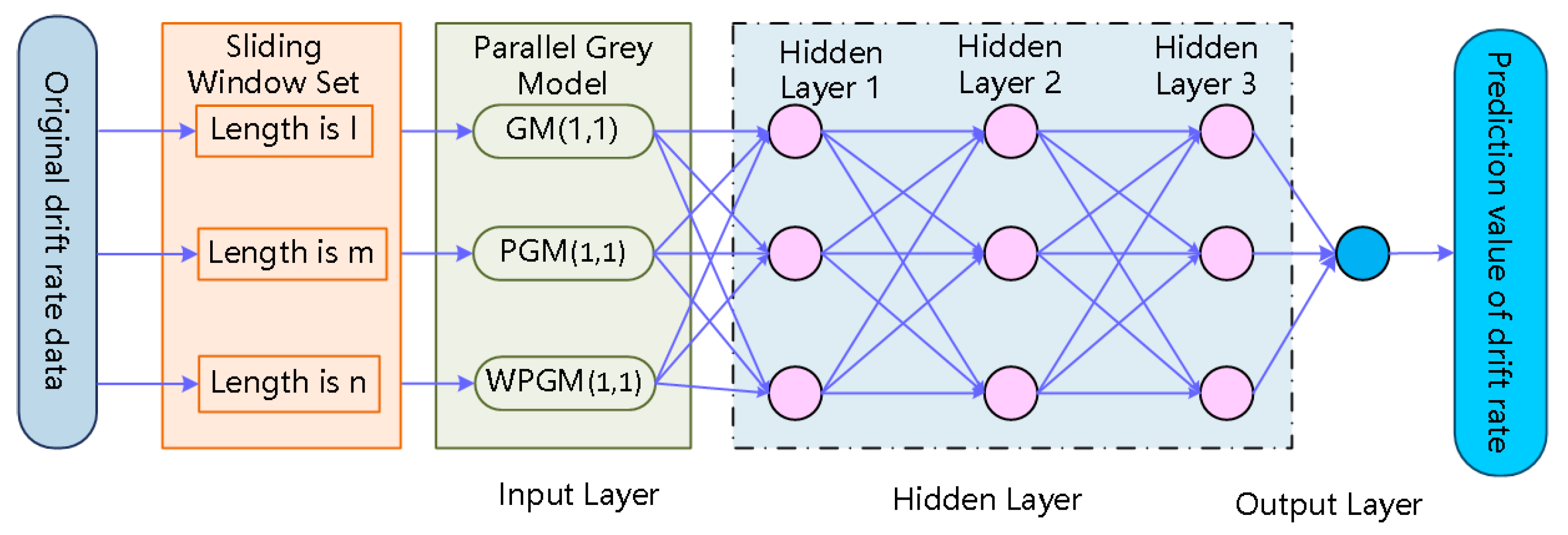
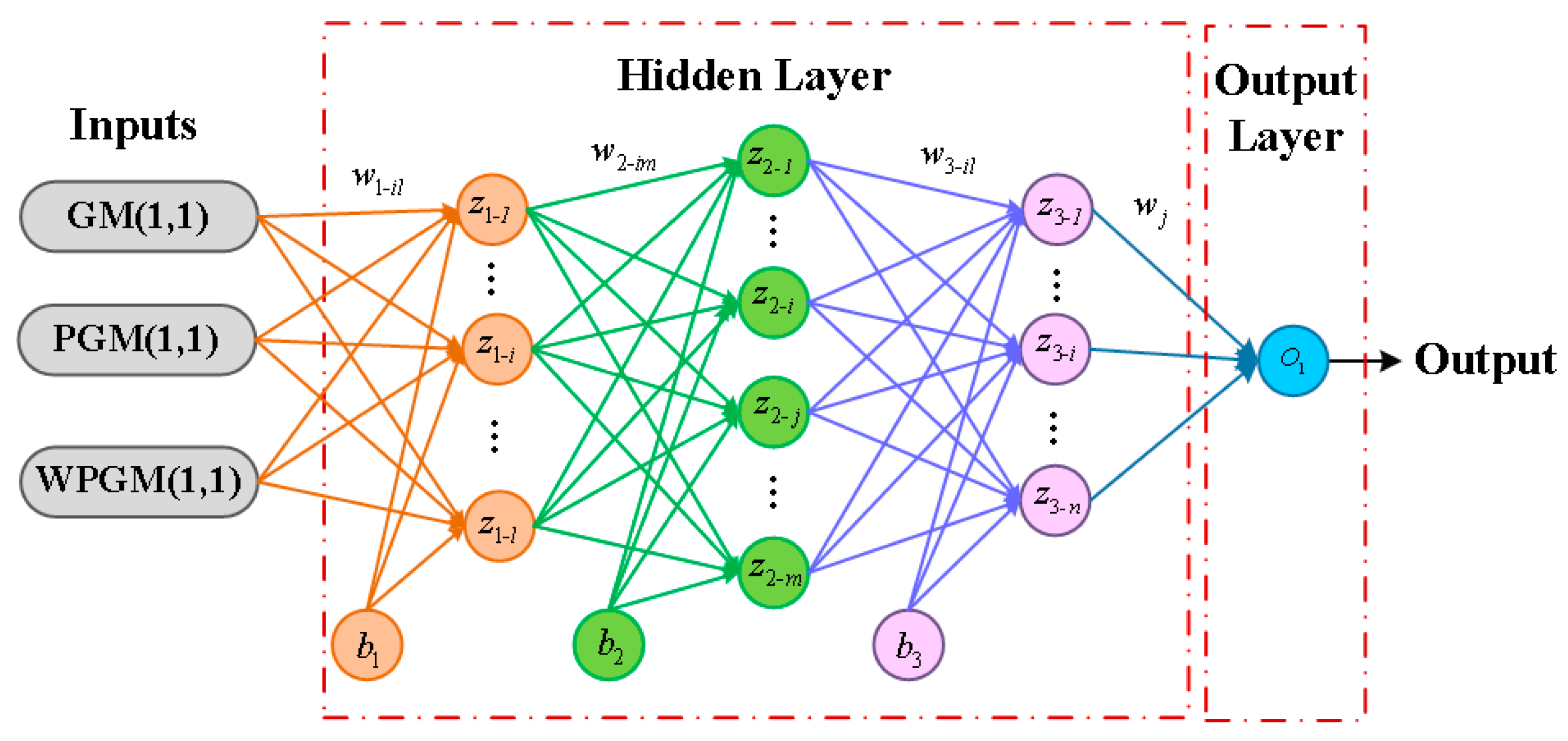
34]. In this paper, the grey model (GM), unbiased grey model (PGM) and weighted unbiased grey model (WPGM) are connected with a feedforward neural network, and sliding windows are added, which form the combined prediction model of a sliding window grey neural network (SGMNN). The topology of SGMNN is shown as
Figure 4. The outputs of three grey models are taken as the inputs of the neural network, and a three-layer neural network structure with two hidden layers is built to put out the prediction results of drift rate.
The prediction steps of the sliding window grey neural network are as follows:
- Step 1.
Data inspection and processing
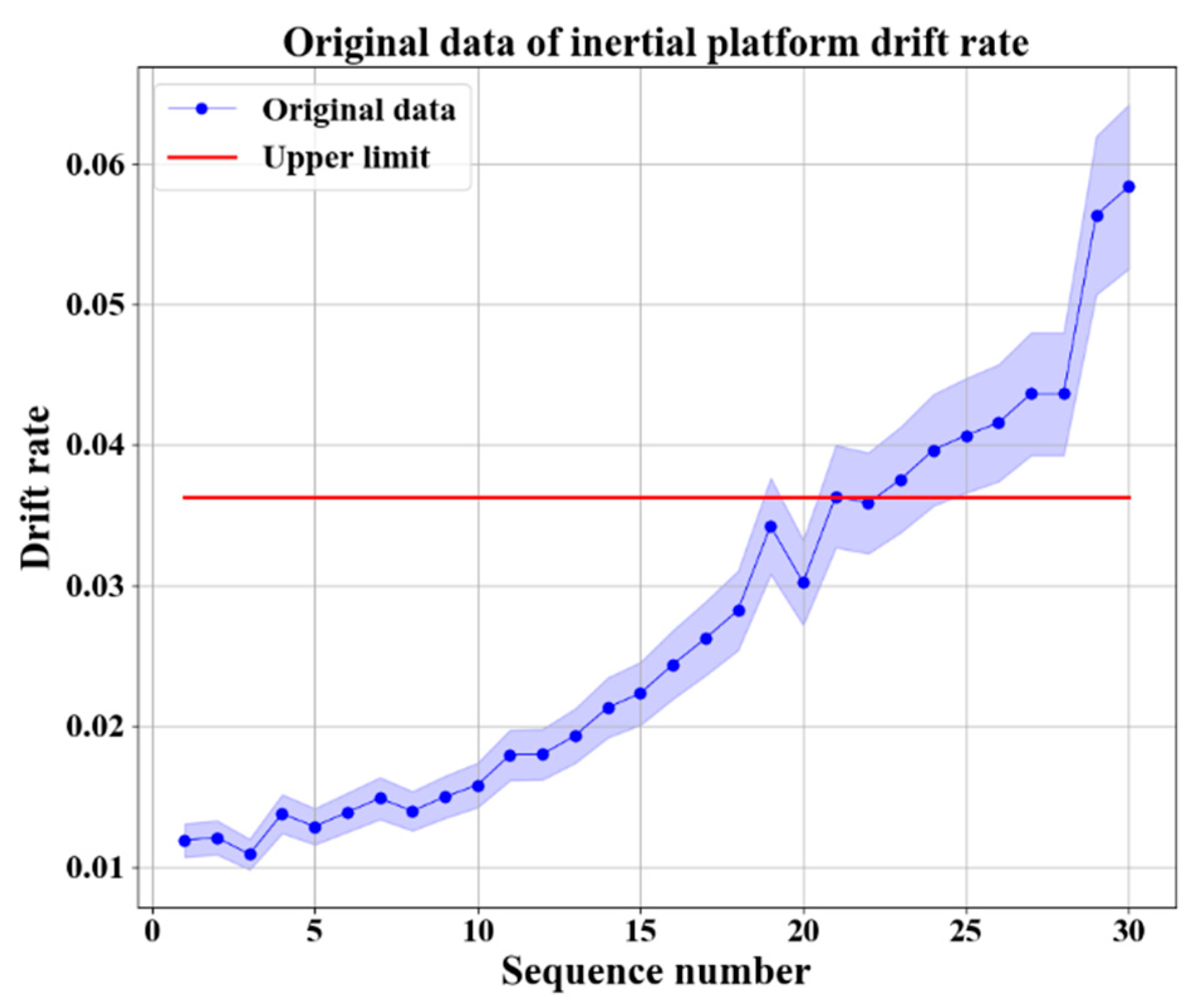
Calculate the series ratio of a sequence to determine whether the grey model can be applied for prediction. If the sequence doesn’t fit the model use conditions, the drift rate sequence should be adjusted. The drift rate sequence of the inertial platform is
, where
n is the sequence number. Calculate the series ratio as follows:
When
should fall within the allowable range
, which verifies that the original sequence
can be applied to the grey prediction model GM(1,1). Otherwise, it needs to do some necessary transformation processing to make the level ratio within the allowable range. The transformation method is to take appropriate constant c for translation, as shown in Formula (2).
The series ratio of sequence
is
- Step 2.
Build the sliding windows
The fixed length sliding window is applied [
35]. The grey prediction model is constructed based on data in sliding window.
where
m represents the moment in the drift rate series and
k represents the length of the sliding window.
- Step 3.
Build the grey model
In this paper, GM(1,1), PGM(1,1) [
36] and WPGM(1,1) [
37,
38] models are built for prediction.
- (1)
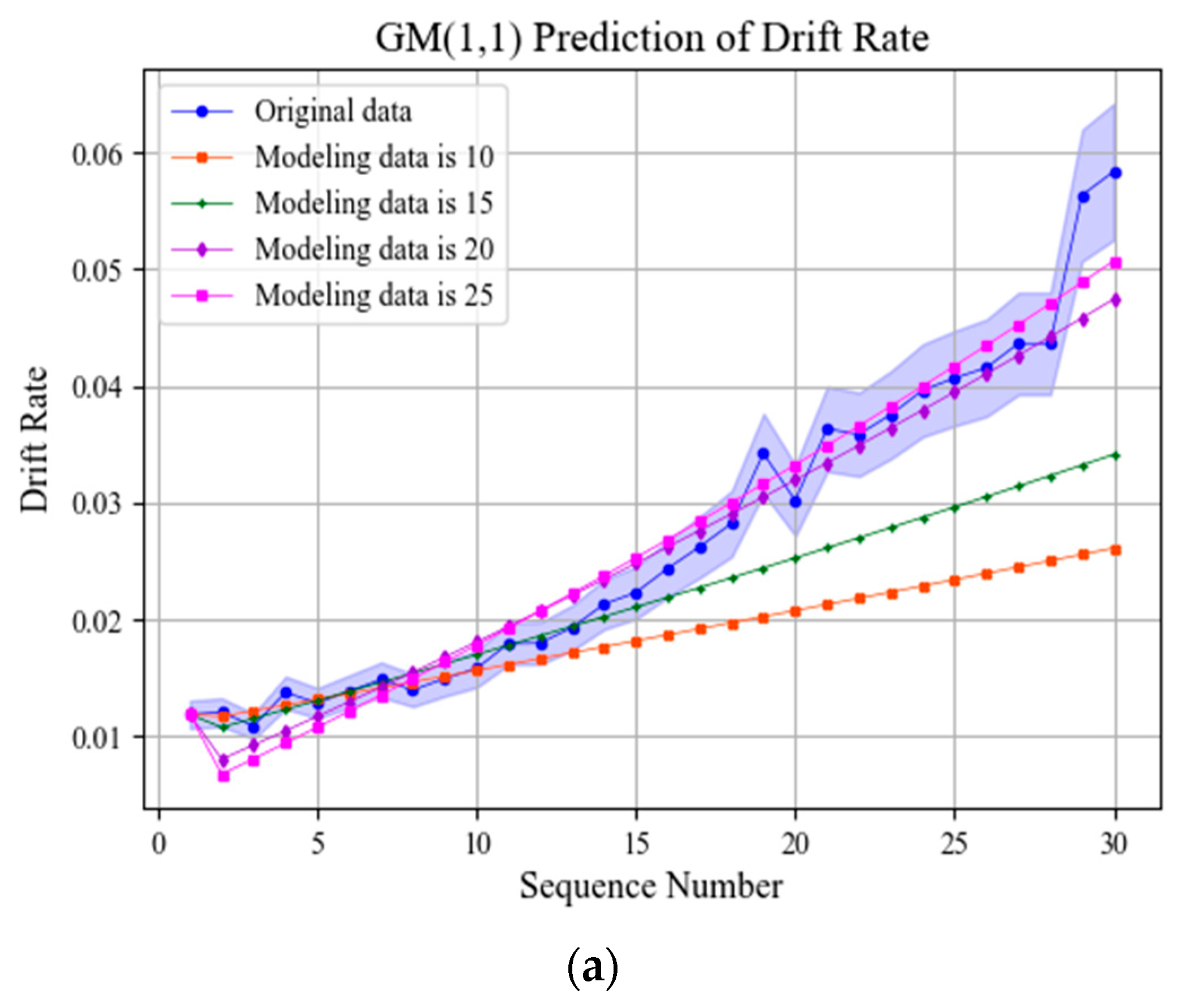
GM(1,1) model
Construct the drift rate nearest neighbor mean first cumulative sequence (1-AGO) as follows,
The formula of GM(1,1) is as follows,
where
a is the development coefficient,
b is the grey action and
k = 2, 3, …,
n is the number of newly constructed sequence elements.
Parameters
a and
b can be estimated by least squares.
where
The prediction sequence is obtained by cumulative reduction as follows.
- (2)
PGM(1,1) model
The PGM(1,1) model obtains the model parameters of
and
according to formulas
and
, where
a and
b are parameters in GM(1,1). The prediction sequence is obtained as follows.
k = 2, 3, …, n is the number of newly constructed sequence elements.
- (3)
WPGM(1,1) model
Give a certain weight
p for
and
in the GM(1,1) model, and it can obtain
B as follows.
In the formula,
p is the weight value. The search area of weight value
p can be set as [0.01, 0.99], and the increment unit is 0.02. The search method is to perform the modeling step in turn. In each cycle, the predicted average relative error value needs to be calculated, and the best value is obtained by comparison among errors with different weight value
p [
39].
- Step 4.
Build the neural network model
The prediction results of SGM(1,1), SPGM(1,1) and SWPGM(1,1) with sliding windows are input into the feedforward neural network and trained to obtain the grey neural network prediction model SGMNN. The structure of neural network is shown in
Figure 5.
The weights and thresholds of neurons in feedforward neural networks are updated by a back propagation (BP) algorithm. The gradient descent method is used to minimize the loss function. According to the learning rate, the parameters in the network are iteratively updated to meet the set training step size or error accuracy requirements.
- Step 5.
Model adjustment
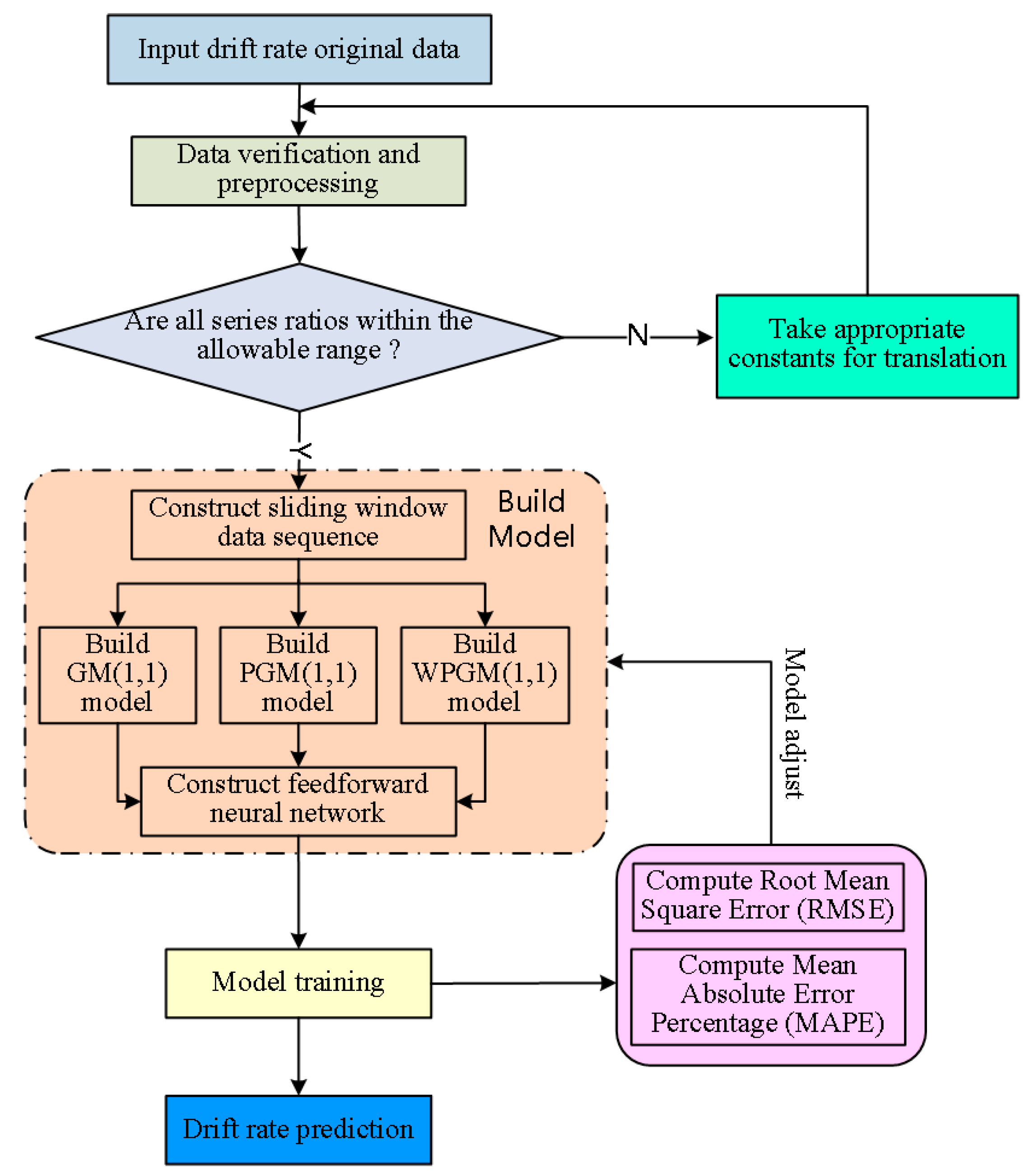
Mean absolute percentage error (MAPE) and root mean square error (RMSE) are calculated by comparing the predicted results with the real values. According to the error, the model parameters including sliding window length and neural network parameters are adjusted to obtain the best prediction model.
- Step 6.
Prediction
The sliding window grey neural network model is trained from the historical test drift rate data, and the drift rate value in the specified time of the system is predicted to realize the prediction.
The algorithm flow is shown in
Figure 6.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}