
Quantification of Wide-Area Norwegian Spring-Spawning Herring Population Density with Ocean Acoustic Waveguide Remote Sensing (OAWRS)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods and Materials
2.1. Population Density Measurements without Significant Fish-Attenuation
2.2. Correcting Population Density Maps for Fish-Attenuation
2.3. Predicting Ambient Noise Reductions from Fish-Attenuation
2.4. Predicting Sensing Range Reductions from Fish-Attenuation
3. Results
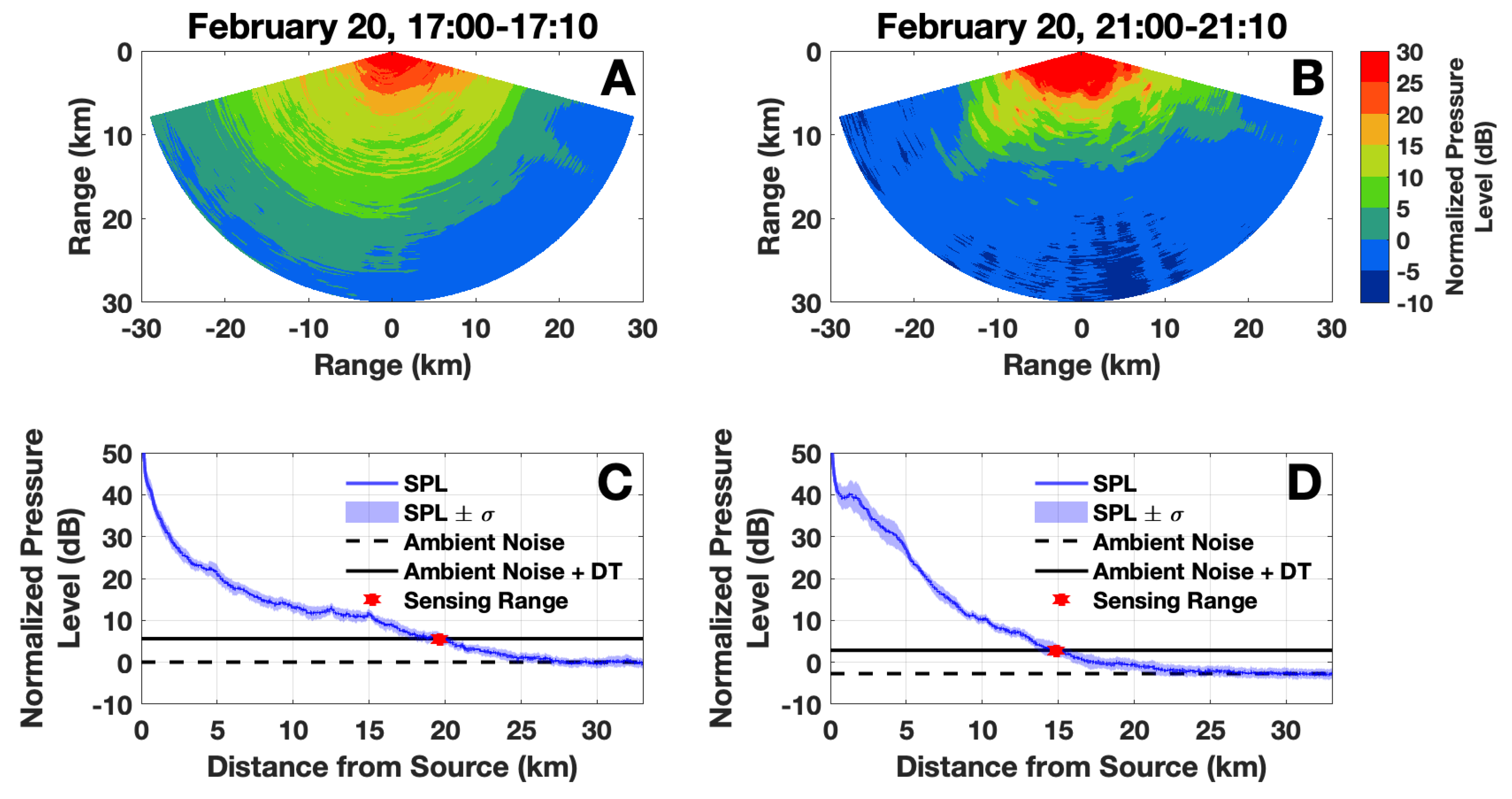
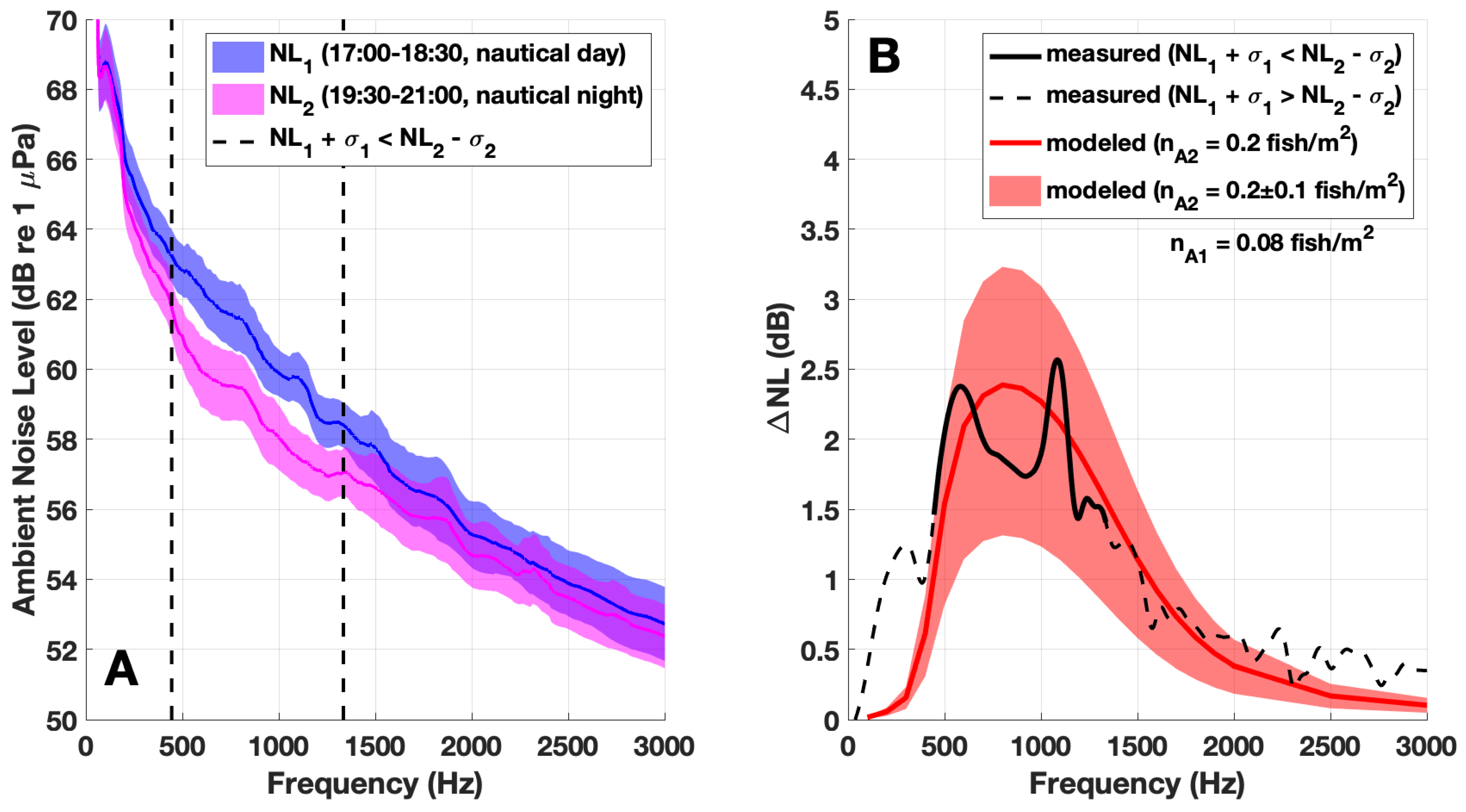
3.1. Ambient Noise Reductions from Fish-Attenuation
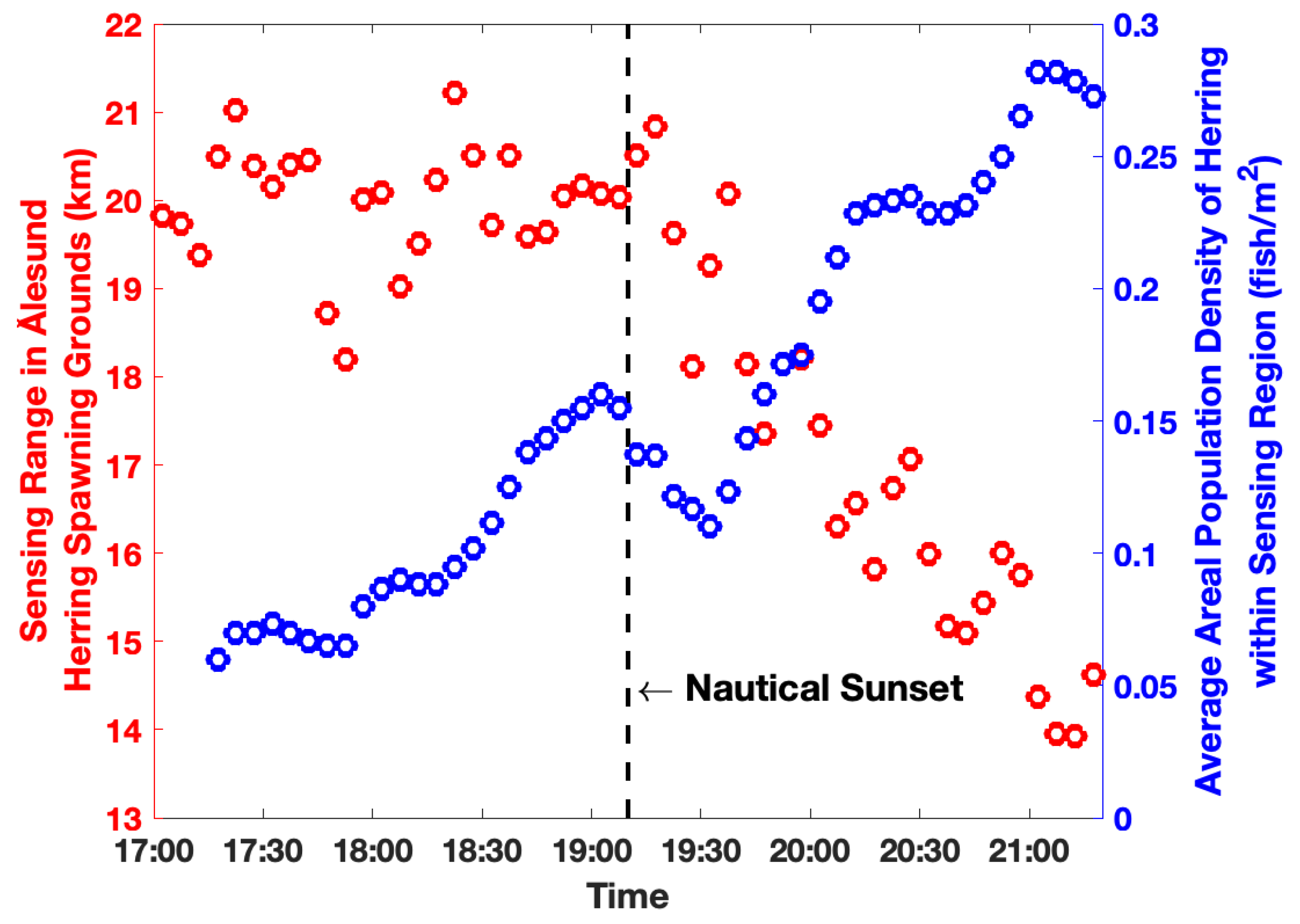
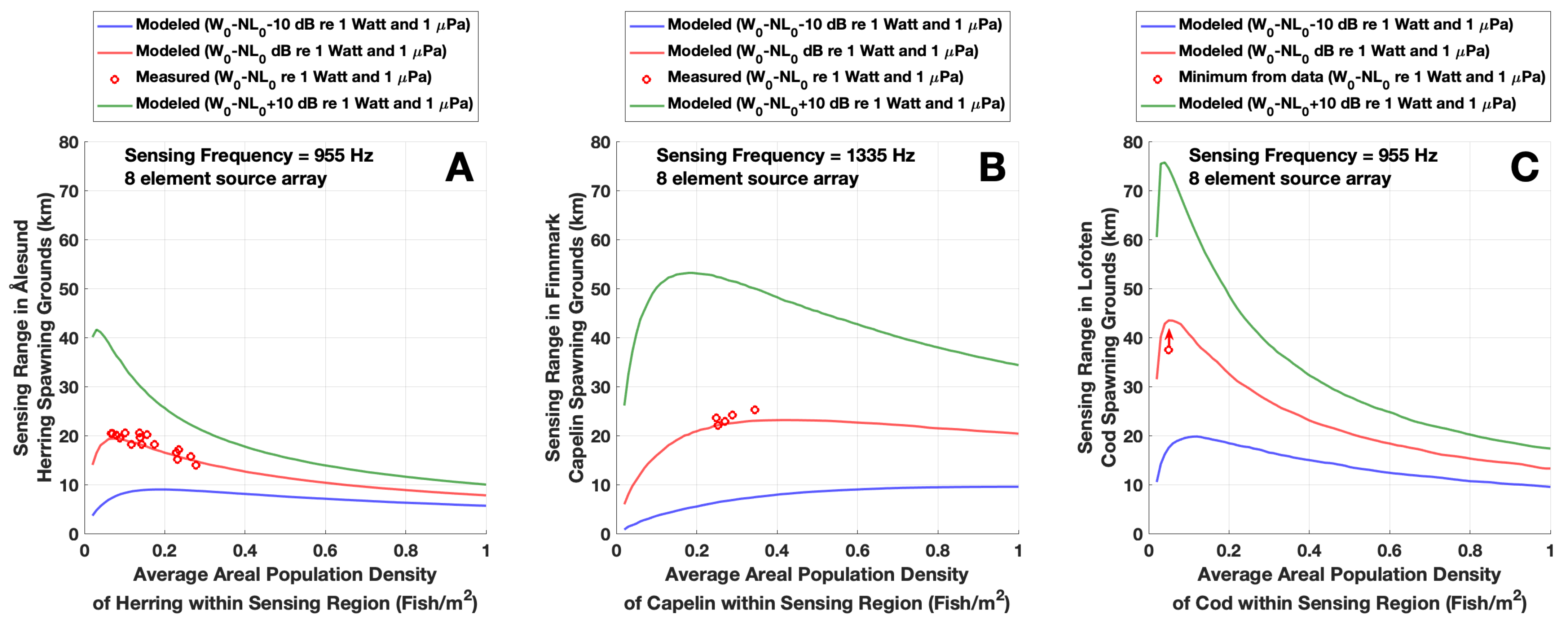
3.2. Sensing Range Reductions from Fish-Attenuation
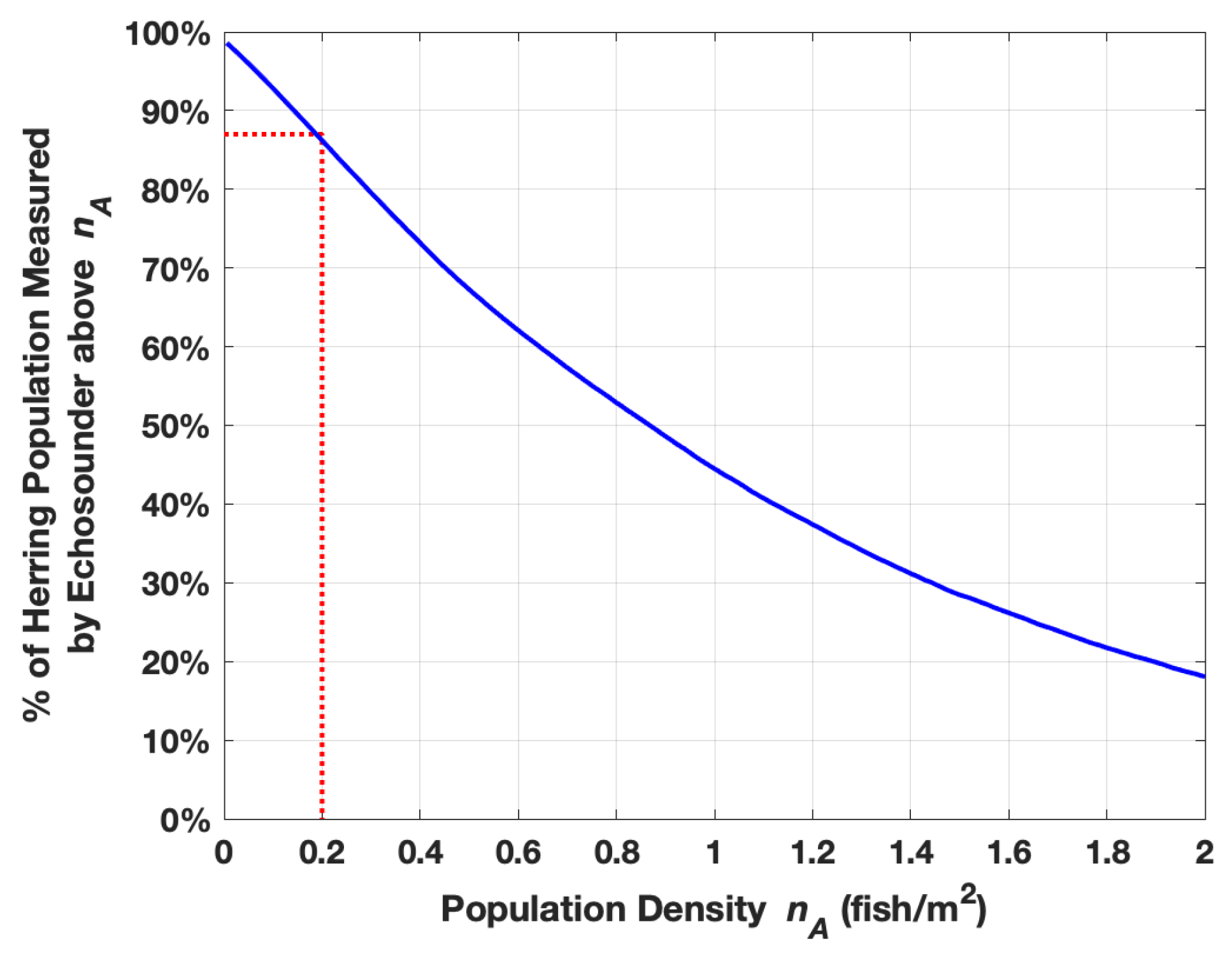
3.3. Spatial Undersampling in Echosounder Surveys
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
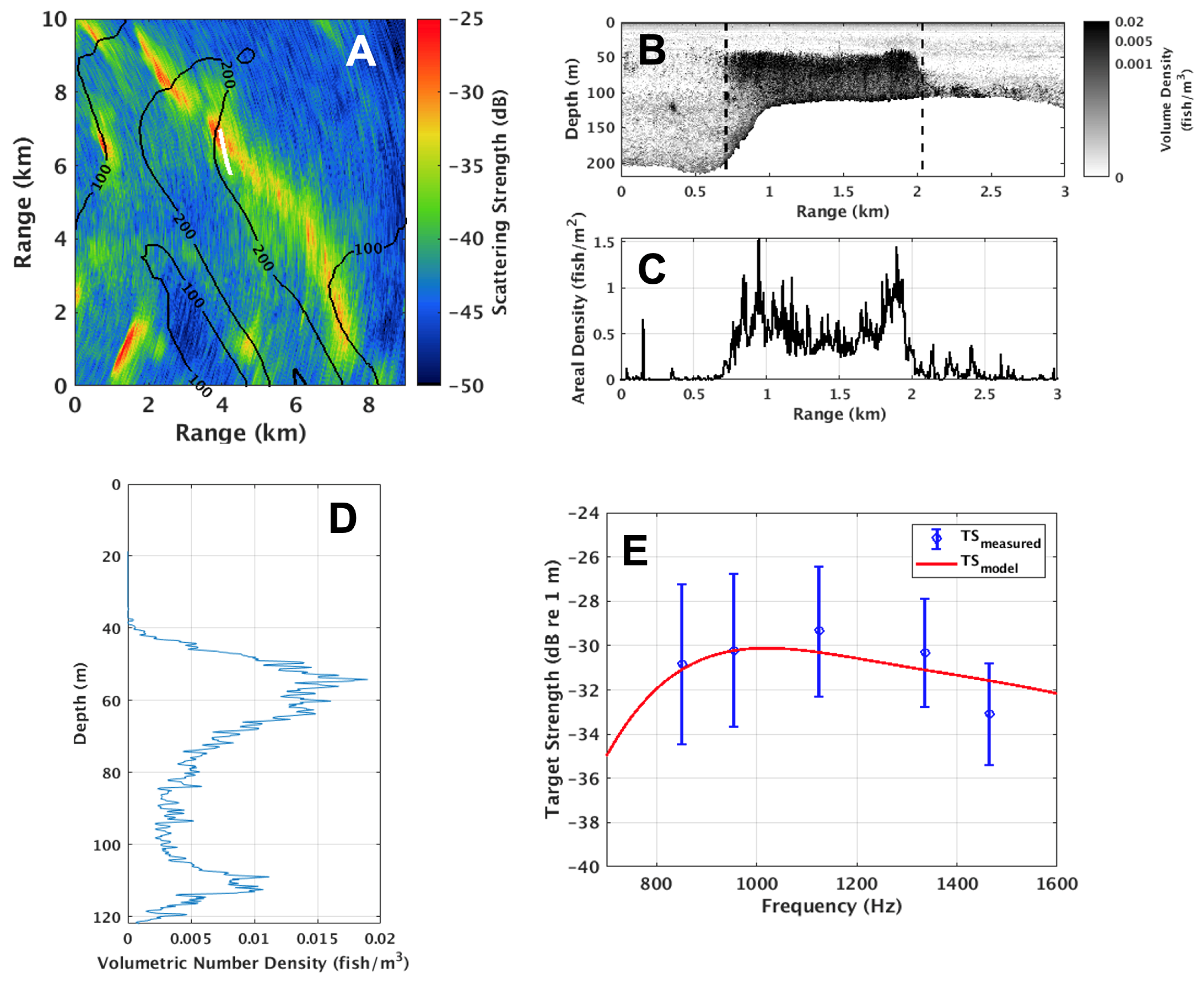
Appendix A. Measurement of Scattering Strength

Appendix B. Calibration of Target Strength
Appendix C. Measuring Sensing Range
Appendix D. Modeling Two-Way Attenuation in a Waveguide Environment
Appendix E. Modeling the Target Strength of an Individual Fish
Appendix F. Synoptic Echosounder Measurements of Herring Areal Density and Depth Distribution



Appendix G. Measurements of Herring Population from OAWRS Population Density Maps

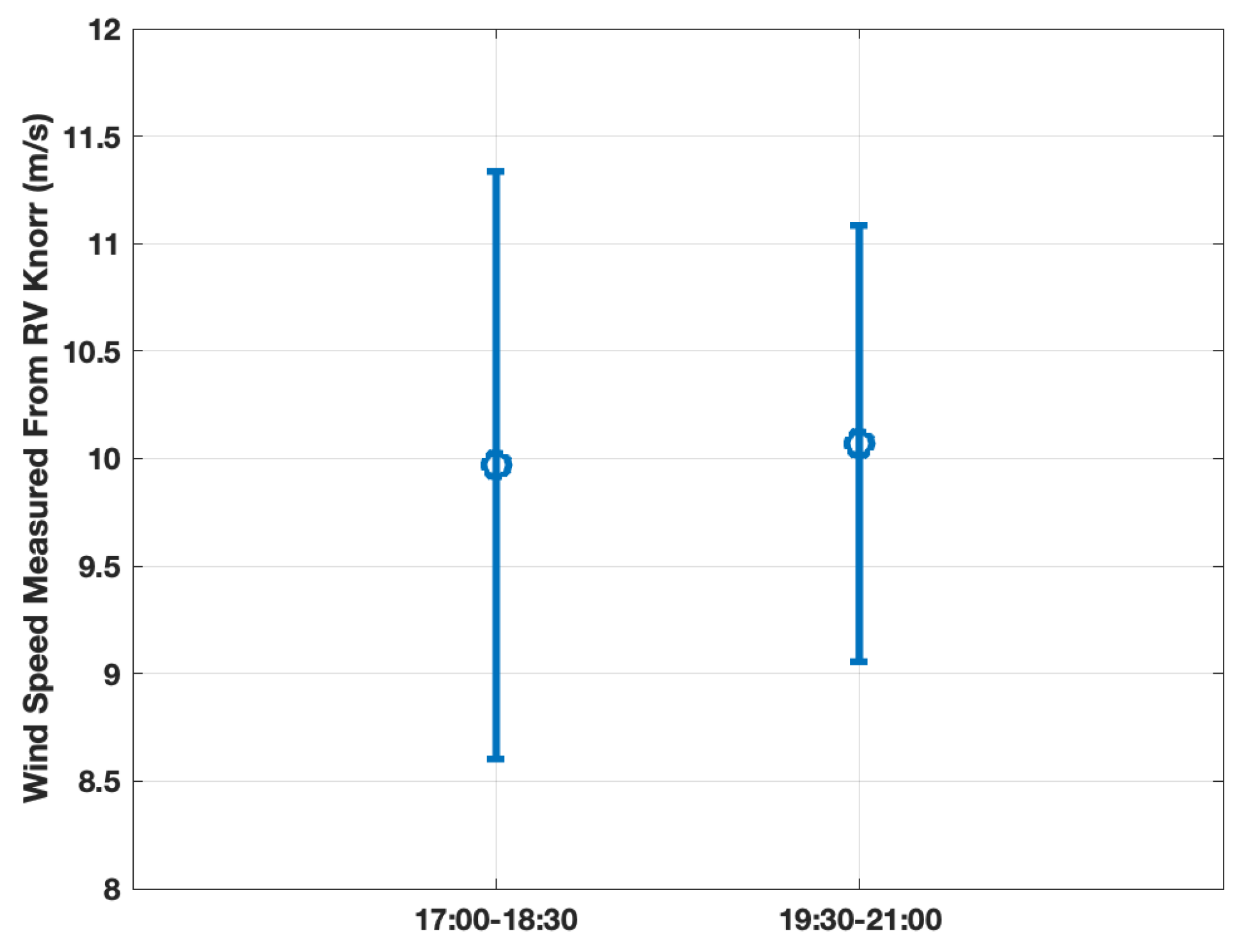
Appendix H. Measured Wind Speed Variations
References
- Marine Stewardship Council. International Action Needed on Herring and Blue Whiting Stocks. 2020. Available online: https://www.msc.org/media-centre/news-opinion/news/2020/12/04/international-action-needed-on-herring-and-blue-whiting-stocks (accessed on 18 August 2021).
- Berdahl, A.; Westley, P.A.; Levin, S.A.; Couzin, I.D.; Quinn, T.P. A Collective Navigation Hypothesis for Homeward Migration in Anadromous Salmonids. Fish Fish. 2016, 17, 525–542. [Google Scholar] [CrossRef] [Green Version]
- Klemas, V. Fisheries Applications of Remote Sensing: An Overview. Fish. Res. 2013, 148, 124–136. [Google Scholar] [CrossRef]
- Makris, N.C.; Ratilal, P.; Jagannathan, S.; Gong, Z.; Andrews, M.; Bertsatos, I.; Godø, O.; Nero, R.; Jech, J.M. Critical population density triggers rapid formation of vast oceanic fish shoals. Science 2009, 323, 1734–1737. [Google Scholar] [CrossRef] [Green Version]
- Makris, N.C.; Ratilal, P.; Symonds, D.; Jagannathan, S.; Lee, S.; Nero, R. Fish population and behavior revealed by instantaneous continental shelf-scale imaging. Science 2006, 311, 660–663. [Google Scholar] [CrossRef]
- Jagannathan, S.; Bertsatos, I.; Symonds, D.; Chen, T.; Nia, H.; Jain, A.; Andrews, M.; Gong, Z.; Nero, R.; Ngor, L.; et al. Ocean Acoustics Waveguide Remote Sensing (OAWRS) of marine ecosystems. Mar. Ecol. Prog. Ser. 2009, 395, 137–160. [Google Scholar] [CrossRef]
- Gong, Z.; Andrews, M.; Jagannathan, S.; Patel, R.; Jech, J.M.; Makris, N.C.; Ratilal, P. Low-frequency target strength and abundance of shoaling Atlantic herring (Clupea harengus) in the Gulf of Maine during the Ocean Acoustic Waveguide Remote Sensing 2006 Experiment. J. Acoust. Soc. Am. 2010, 127, 104–123. [Google Scholar] [CrossRef]
- Andrews, M.; Gong, Z.; Ratilal, P. Effects of multiple scattering, attenuation, and dispersion in waveguide sensing of fish. J. Acoust. Soc. Am. 2011, 130, 1253–1271. [Google Scholar] [CrossRef]
- Yi, D.H.; Gong, Z.; Jech, J.M.; Ratilal, P.; Makris, N.C. Instantaneous 3D continental-shelf scale imaging of oceanic fish by multi-spectral resonance sensing reveals group behavior during spawning migration. Remote Sens. 2018, 10, 108. [Google Scholar] [CrossRef] [Green Version]
- Makris, N.C.; Godø, O.R.; Yi, D.H.; Macauley, G.J.; Jain, A.D.; Cho, B.; Gong, Z.; Jech, J.M.; Ratilal, P. Instantaneous areal population density estimation of entire Atlantic cod and herring spawning groups and group size distribution relative to total spawning population. Fish Fish. 2018, 20, 201–213. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Garcia, H.; Tran, D.D.; Jain, A.D.; Yi, D.H.; Gong, Z.; Jech, J.M.; Godø, O.R.; Makris, N.C.; Ratilal, P. Vast assembly of vocal marine mammals from diverse species on fish spawning ground. Nature 2016, 531, 366–369. [Google Scholar] [CrossRef] [PubMed]
- Duane, D.; Cho, B.; Jain, A.D.; Godø, O.R.; Makris, N.C. The Effect of Attenuation from Fish Shoals on Long-Range, Wide-Area Acoustic Sensing. Remote Sens. 2019, 11, 2464. [Google Scholar] [CrossRef] [Green Version]
- Ratilal, P.; Makris, N.C. Mean and covariance of the forward field propagated through a stratified ocean waveguide with three-dimensional random inhomogeneities. J. Acoust. Soc. Am. 2004, 118, 3532–3558. [Google Scholar] [CrossRef]
- Makris, N.C. A foundation for logarithmic measures of fluctuating intensity in pattern recognition. Opt. Lett. 1995, 20, 2012–2014. [Google Scholar] [CrossRef]
- Makris, N.C. The effect of saturated transmission scintillation on ocean acoustic intensity measurements. J. Acoust. Soc. Am. 1996, 100, 769–783. [Google Scholar] [CrossRef]
- Wang, D.; Ratilal, P. Angular resolution enhancement provided by nonuniformly-spaced linear hydrophone arrays in ocean acoustic waveguide remote sensing. Remote Sens. 2017, 9, 1036. [Google Scholar] [CrossRef] [Green Version]
- Kuperman, W.A.; Ingenito, F. Spatial correlation of surface generated noise in a stratified ocean. J. Acoust. Soc. Am. 1980, 67, 1988–1996. [Google Scholar] [CrossRef]
- Andrews, M.; Chen, T.; Ratilal, P. Empirical dependence of acoustic transmission scintillation statistics on bandwidth, frequency, and range in New Jersey continental shelf. J. Acoust. Soc. Am. 2009, 125, 111–124. [Google Scholar] [CrossRef]
- Ingenito, F. Measurements of mode attenuation coefficients in shallow water. J. Acoust. Soc. Am. 1973, 53, 858–863. [Google Scholar] [CrossRef]
- Skaret, G.; Slotte, A. Herring submesoscale dynamics through a major spawning wave: Duration, abundance fluctuation, distribution, and schooling. ICES J. Mar. Sci. 2017, 74, 717–727. [Google Scholar] [CrossRef]
- Yi, D.H.; Makris, N.C. Feasibility of Acoustic Remote Sensing of Large Herring Shoals and Seafloor by Baleen Whales. Remote Sens. 2016, 8, 693. [Google Scholar] [CrossRef] [Green Version]
- Johnson, M.; Madsen, P.T.; Zimmer, W.M.X.; de Soto, N.A.; Tyack, P.L. Beaked whales echolocate on prey. Proc. Biol. Sci. 2004, 271, 2239–2247. [Google Scholar] [CrossRef] [PubMed]
- Collins, M. A split-step Padé solution for the parabolic equation method. J. Acoust. Soc. Am. 1993, 93, 1736–1742. [Google Scholar] [CrossRef]
- Dyer, I. Statistics of Sound Propagation in the Ocean. J. Acoust. Soc. Am. 1970, 48, 337–345. [Google Scholar] [CrossRef]
- Chen, T. Mean, Variance, and Temporal Coherence of the 3d Acoustic Field Forward Propagated through Random Inhomogeneities in Continental-Shelf and Deep Ocean Waveguides. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2009. [Google Scholar]
- Jones, F.H.; Scholes, P. Gas secretion and resorption in the swimbladder of the cod (Gadus morhua). J. Comp. Physiol. 2018, 10, 108. [Google Scholar]
- Weston, D.E. Sound propagation in the presence of bladder fish. In Underwater Acoustics; Albers, V.M., Ed.; Plenum Press: New York, NY, USA, 1967; pp. 55–88. [Google Scholar]
- Ona, E. An expanded target-strength relationship for herring. ICES J. Mar. Sci. 2003, 60, 493–499. [Google Scholar] [CrossRef] [Green Version]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duane, D.; Godø, O.R.; Makris, N.C. Quantification of Wide-Area Norwegian Spring-Spawning Herring Population Density with Ocean Acoustic Waveguide Remote Sensing (OAWRS). Remote Sens. 2021, 13, 4546. https://doi.org/10.3390/rs13224546
Duane D, Godø OR, Makris NC. Quantification of Wide-Area Norwegian Spring-Spawning Herring Population Density with Ocean Acoustic Waveguide Remote Sensing (OAWRS). Remote Sensing. 2021; 13(22):4546. https://doi.org/10.3390/rs13224546
Chicago/Turabian StyleDuane, Daniel, Olav Rune Godø, and Nicholas C. Makris. 2021. "Quantification of Wide-Area Norwegian Spring-Spawning Herring Population Density with Ocean Acoustic Waveguide Remote Sensing (OAWRS)" Remote Sensing 13, no. 22: 4546. https://doi.org/10.3390/rs13224546
APA StyleDuane, D., Godø, O. R., & Makris, N. C. (2021). Quantification of Wide-Area Norwegian Spring-Spawning Herring Population Density with Ocean Acoustic Waveguide Remote Sensing (OAWRS). Remote Sensing, 13(22), 4546. https://doi.org/10.3390/rs13224546