1. Introduction
Interactions between climate and fire are bidirectional. On the one hand, climate impacts fire regimes [
1,
2,
3,
4], mostly by modifying temperature and precipitation patterns, which in turn impacts fire ignition and behaviour through changes in soil and fuel moisture, vegetation productivity, and fuel availability [
5,
6,
7,
8]. On the other hand, biomass burning is a critical source of aerosols and greenhouse gases that directly affect atmospheric chemistry [
9,
10], carbon budgets [
11,
12], and carbon stocks [
13]. Emissions from fires increase aerosol optical depth, modifying the radiation budget and, thus, warming the lower atmosphere, which affects regional temperature, clouds, and precipitation patterns [
14,
15].
Fires have important ecological implications as well. They are closely related to biodiversity, either favouring or degrading it depending on fire severity and persistency [
16,
17,
18]. Furthermore, wildfires have significant societal impacts, particularly when extreme events occur as a result of climate anomalies. Large damage to people’s lives, health and infrastructure have been observed in recent catastrophic fire seasons of Southern Europe, Australia and Western USA [
2,
8,
19].
For those reasons, Fire Disturbance was included by the Global Climate Observing System (GCOS) as one of the Essential Climate Variables (ECV) [
20], acknowledging its relevance to characterising the Earth’s climate system. The European Space Agency (ESA) responded to the GCOS demands by promoting the Climate Change Initiative (CCI) programme in 2009. Its main objective was to develop long-term datasets of ECVs based on satellite observations. This programme was initially focused on 13 ECVs (extended to 26 ECVs in 2018), each of them addressed within a dedicated project that encompassed algorithm development, validation, uncertainty characterisation, and large-scale earth observations data processing, among other tasks [
21].
Fire disturbance was one of the initial ECVs tackled within the CCI programme (FireCCI project,
https://climate.esa.int/en/projects/fire/, accessed on 21 October 2021), aiming to produce long-term time series of global burned area (BA) data. Although BA information is required for a wide range of applications [
22,
23], the FireCCI project was mainly oriented towards climate modellers and, hence, BA data have been mainly used for the characterisation of fire emissions [
9,
24] and the parameterisation of Dynamic Global Vegetation Models (DGVMs) [
25,
26,
27,
28]. These applications strongly benefit from an extended temporal coverage of BA datasets, while assuring their temporal and spatial consistency [
29]. The most recent BA products developed within the FireCCI project include the FireCCI51, based on MODIS data, which extends from 2001 to 2019 [
30], and the FireCCILT11 (1982–2018), based on AVHRR-LTDR data [
31].
A few years after the ESA CCI programme started, the European Commission launched the Copernicus Climate Change Service (C3S,
https://climate.copernicus.eu/, accessed on 21 October 2021), which now includes more than 20 ECVs [
32]. This service builds upon the research and development carried out by the scientific community, especially the one associated to the CCI programme, and it is the service in charge of the operational production of those ECV datasets. Regarding BA, the FireCCI51 product was transferred to the C3S for the historical record, while demanding the generation of a new BA dataset based on European Copernicus satellites. The new product should guarantee consistency with the FireCCI51 data, as this dataset was developed only for research purposes, and it would no longer be processed. Adapting both the BA algorithm and the product to the new Copernicus missions would assure an operational continuity of the BA products. Since FireCCI51 was generated from the 250 m resolution near-infrared (NIR) band of the MODIS sensor [
30], it was decided to base the continuity of this BA dataset on the Ocean and Land Colour Instrument (OLCI) on board Sentinel-3 (S3), which has a similar spatial and temporal resolution.
The adaptation of algorithms and products to different sensors is often performed when long-term time series are required, since the lifetime of single missions is generally limited. Coupling datasets from different input sensors extends the length of the series or helps fill existing gaps. The change from one input data source to another is not automatic, as each sensor has its particular characteristics in terms of spatial, temporal and radiometric resolution, which determine the performance of the algorithm. For this reason, a thorough review of the algorithm is required, in order to adapt it to the characteristics of the new sensor. For instance, the SeaWIFS Ocean Aerosol Retrieval (SOAR) algorithm, originally designed for the retrieval of aerosol optical depth (AOD) over water from the SeaWIFS sensor [
33], and the Deep Blue algorithm to retrieve AOD over land [
34], have been adapted to the Suomi-NPP Visible Infrared Imaging Radiometer Suite (VIIRS) sensor [
35,
36] and to the AVHRR sensor [
37], requiring several algorithm adaptations and optimisations. Another example is the sea surface temperature (SST) dataset of C3S (
https://cds.climate.copernicus.eu/cdsapp#!/dataset/satellite-sea-surface-temperature, accessed on 21 October 2021), which derives independent SST Level 3 products from AVHRR, ATSR1, ATSR2, AATSR and SLSTR sensors [
38]. To assure the consistency of the different products, the harmonisation of the sensor input data [
39] and the adaptation of some parts of the SST retrieval algorithm [
40] were performed. Although a Level 4 multi-sensor product exists, which provides spatially complete information, the authors indicate that the process of interpolation for gap-filling entails that feature resolution is degraded relative to the lower-level data [
41], and for this reason, different products from the individual sensors are still provided, and are useful.
This paper presents the adaptation of the FireCCI51 BA algorithm to the OLCI sensor and the generation of the new BA dataset, named C3SBA10, which is now part of the C3S service. This product is the first global BA product derived from OLCI data. This manuscript briefly describes the original algorithm (FireCCI51) in
Section 2.1, while the pre-processing, adaptation, uncertainty characterisation, generation, and distribution of the OLCI-based BA dataset are explained in
Section 2.2,
Section 2.3,
Section 2.4 and
Section 2.5. The C3SBA10 data were produced from 2017 to the present. This dataset was designed to be as consistent as possible with its predecessor FireCCI51 (2001–2019) to ensure that multi-decadal analyses can benefit from both datasets uninterruptedly. For this reason, this paper emphasises the inter-comparison analysis between FireCCI51 and C3SBA10 datasets for the common period (2017–2019), pointing out similarities and discrepancies (
Section 2.6). The products were spatially validated using reference data obtained from multitemporal Landsat-8 images, and temporally validated using active fire information (
Section 2.7). The results of the BA detections for the common time series (2017–2019) as well as the quality assessment of the product are presented in
Section 3, followed by the discussion and conclusion (
Section 4 and
Section 5, respectively).
4. Discussion
The transference of the FireCCI BA products to an operational service was challenging as, when the implementation process began in 2018, they were still in development, and had to be adapted to the new Copernicus missions. However, it is important to provide a consistent BA product for the climate service because BA information is demanded by atmospheric and carbon modellers. For this reason, it was decided to make a conservative choice by transferring the experience from the latest version of FireCCI’s BA algorithms (FireCCI51) to the C3S service, while adapting it to the new OLCI sensor on board the S3 satellites. Since the FireCCI51 product was conceived as a research product, not an operational one, it was processed only until 2019. Therefore, this option would guarantee the continuity of the CCI BA time series from 2019 onwards. Thus, the main objective of the C3SBA10 BA algorithm was to create a consistent product with FireCCI51.
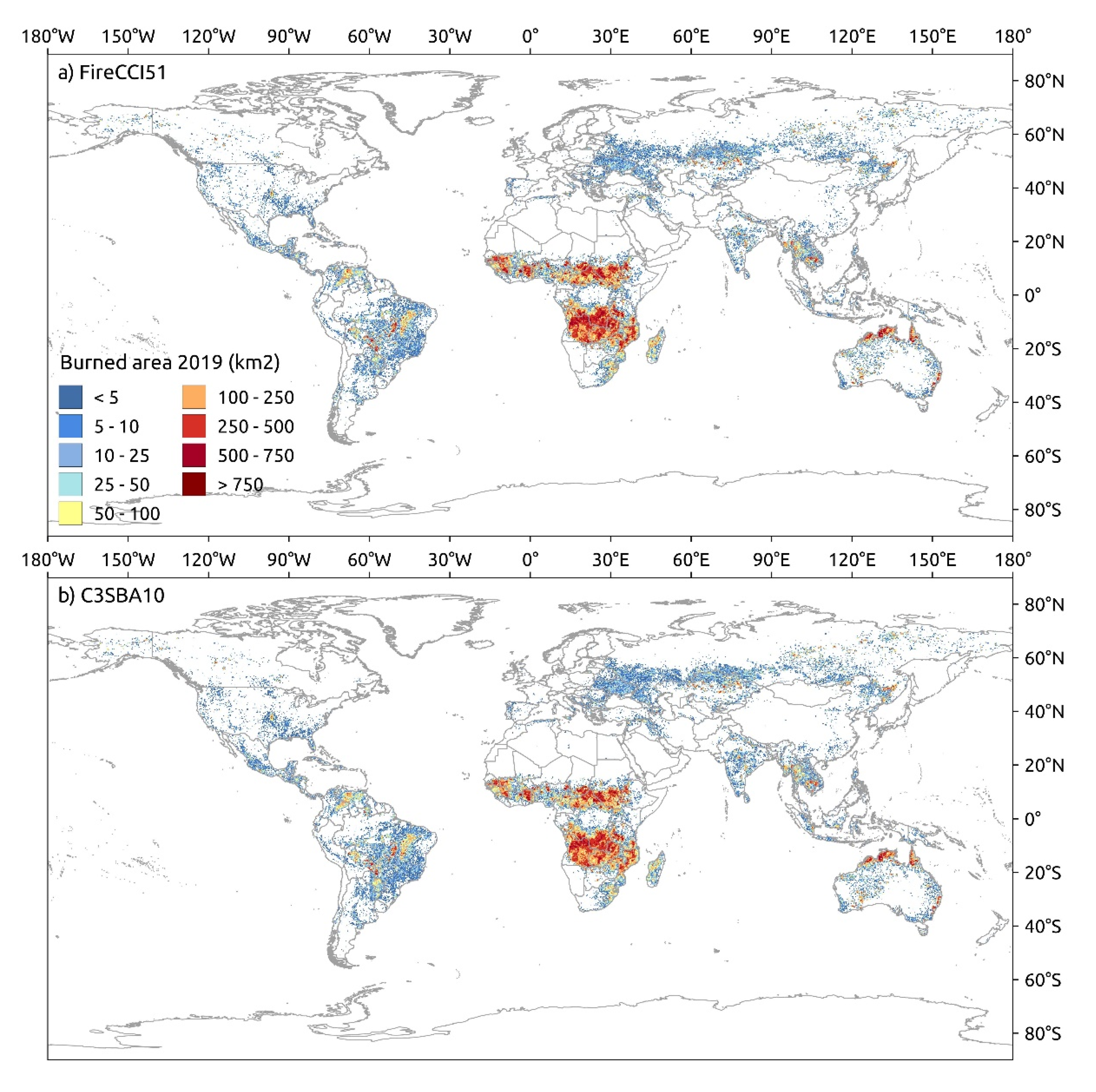
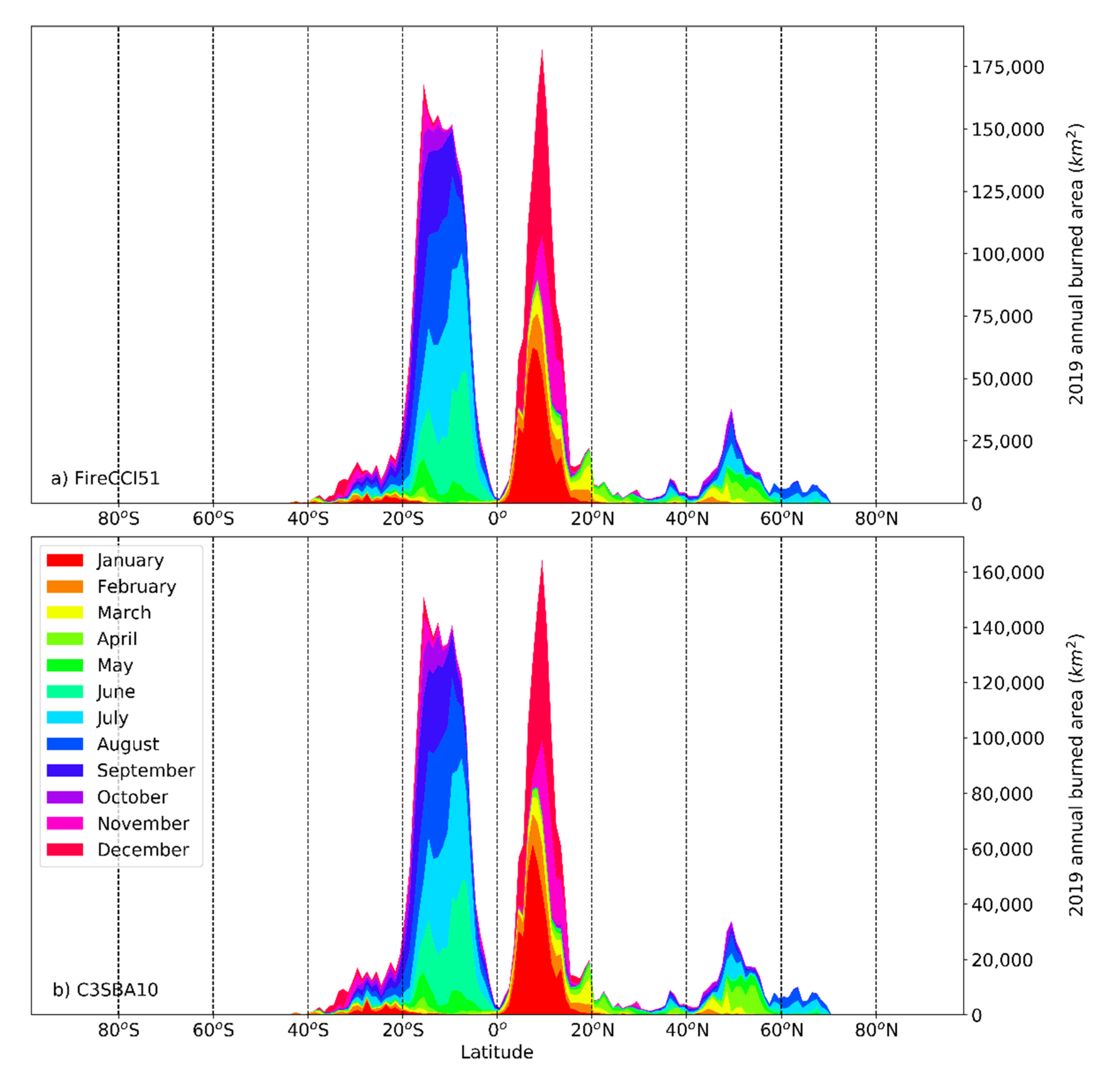
The results of the intercomparison analysis prove this consistency between C3SBA10 and FireCCI51, with similar spatial and temporal trends. The annual BA data show a correlation value of 0.95, with a minor underestimation (slope = 0.92 and RMSE = 1.07 km
2) at 0.05° spatial resolution, the finest spatial resolution used in the comparison (
Table 4). The agreement between the products improved as the grid resolution for intercomparison decreased (
Table 4, and
Figure 7). The main differences between the two products were observed in the first two years of the time series (2017 and 2018) when only S3A was operating, and therefore the temporal resolution of OLCI (2–3 days) was much lower than the MODIS sensor (1 day). When the two S3 satellites were operating, in 2019, the BA estimations between the two products were more similar, although C3SBA10 detected 0.28 × 10
6 km
2 less BA than FireCCI51. Most of this difference (92%) was located in tropical savanna, where a systematic underestimation of C3SBA10 was found. This tendency towards underestimation was also observed in other global BA products (generally based on coarse spatial resolution sensors) when comparing them with regional products based on medium-resolution sensors. For instance, a continental BA product at 20 m derived from Sentinel-2 (S2) for the year 2016 in Sub-Saharan Africa found that global BA products significantly underestimate total BA, as they included 80% less burned area than the S2 BA product [
90]. This was mainly caused by the poor detection of small fires (<100 ha) in global products. Therefore, C3SBA10 is likely missing more small fires than FireCCI51 due to its coarser spatial resolution (300 m vs. 250 m).
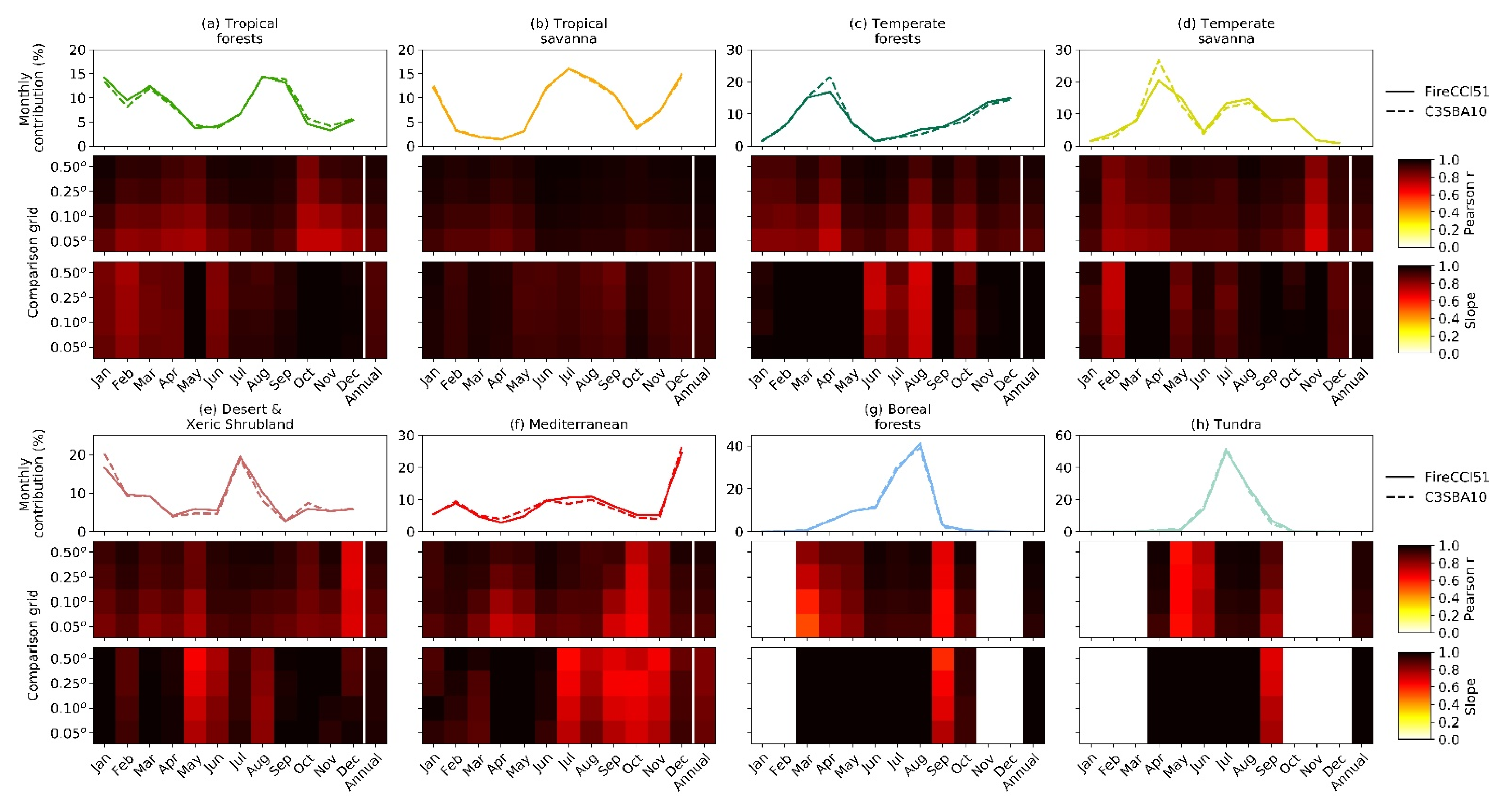
A deeper analysis of the year 2019 showed different trends in the consistency between products among the biomes. It was found that the changes in the correlation between products were linked to the BA detected for each month and biome. Although this relationship did not seem to be linear, i.e., a specific increase in BA did not mean a parallel increase in the correlation, it was clear that the larger the BA detected, the higher the correlation between products. The tropical savanna is an obvious example, and is where most of global BA was found. The boreal regions are another example where the correlation was the highest in the months with the largest BA, while it significantly decreased for the rest of the months. The extreme wildfire event of Eastern Australia [
8] clearly illustrated this phenomenon, since it significantly increased BA and the agreement between products in December in the Mediterranean biome, and in November and December in temperate forests. There were some unusual cases as well, where higher BA did not necessarily mean higher correlation. This was the case for the temperate areas, where the correlation decreased in April.
Temperate savanna and forest biomes cover almost all the Northern Hemisphere’s mid-latitude croplands, located in the Russian Federation and Kazakhstan [
87]. Cropland fires are characterised as small and transient [
91,
92], which made moderate-resolution BA products (250–500 m) unable to properly characterise the extent of cropland BA patches [
87,
88]. Besides this, the human activity in those regions may create two separate peak months (bimodal fire season), one of them taking place in sub-optimal weather conditions, and thus at times when less valid images are available [
93]. It is reasonable to assume that the same issue was affecting both the FireCCI51 and C3SBA10 products, which clearly increased the uncertainty in those regions and, hence, decreased the agreement. In fact, it was very likely that the rest of the biomes were affected by a similar issue [
94], manifesting a decrease in the agreement of products from March to May (
Figure 7) when agricultural activity is high globally [
92].
The validation exercise carried out through the overlapping three-year period (2017–2019) showed that both global BA products presented higher omission than commission errors [
75]. This trend agrees with the validation exercises of other global BA products [
79,
83,
89], as well as with the abovementioned inability of moderate-resolution BA products to detect small fire patches. The omission errors presented in this paper were lower than those found by previous authors for other global BA products, e.g., 72.6% for NASA’s standard product in [
89], and 81% and 71% for two consecutive versions of FireCCI products (FireCCI41 and FireCCI50) in [
83]. However, it must be highlighted that these estimations are not fully comparable to those presented in this paper, since all those studies used so-called short units (reference data generated from a maximum period of 16 days) instead of long units (reference data covering several months, as done in this study) to estimate the spatial accuracy of the products [
75]. Similarly to the amounts of BA detections, the availability of the second S3 in 2019 had a direct impact on the accuracy of C3SBA10 (DC = 61.7 ± 2.9), and hence the accuracy of this year was more similar to that estimated for FireCCI51 (DC = 63.9 ± 2.8).
As was mentioned at the beginning of the discussion, the main aim of the C3SBA10 was to produce, based on European satellites, a BA product that is consistent with its precursor FireCCI51. However, the successful achievement of this requirement meant, at the same time, that some limitations detected in the FireCCI products were maintained in the new dataset. Among these limitations were the low temporal reporting accuracy shown by FireCCI51 [
30] and potential tiling effects. The former was indeed observed, as only around 20% of the burned pixels were detected within ±1 day after the fire, 44% within ±3 days and 87% within ±10 days. The reporting accuracy problems of C3SBA10 and FireCCI51 are related to the criteria used to create the monthly composites, which are the starting point of both algorithms. To avoid the cloud and observation problems of the daily images, monthly NIR composites were created by selecting the most suitable NIR observation on a 20-day moving window centred around the date of the nearest active fire. This moving window was only expanded when less than four cloud-free images were found after the fire. Thus, in most cases, the search was limited to the first 10 post-fire days. However, inside the searching window, the algorithm prioritises the separability of the burned signal over the proximity of the observation to the date of the nearest active fire. The most separable observation, although it theoretically should be, is not always found in the day immediately after the fire due to angular effects. Although a temporal reporting accuracy of ±10 days could be reasonable for some applications (e.g., dynamic vegetation modelling), there are others, such as atmospheric emissions estimations, wherein the precise date of burn is very critical. However, these applications commonly use grid BA files, where BA is provided as the total per month in each grid cell. An additional post-processing step could be applied, for instance, reallocating the BA estimations following the active fires’ temporal distribution [
9].
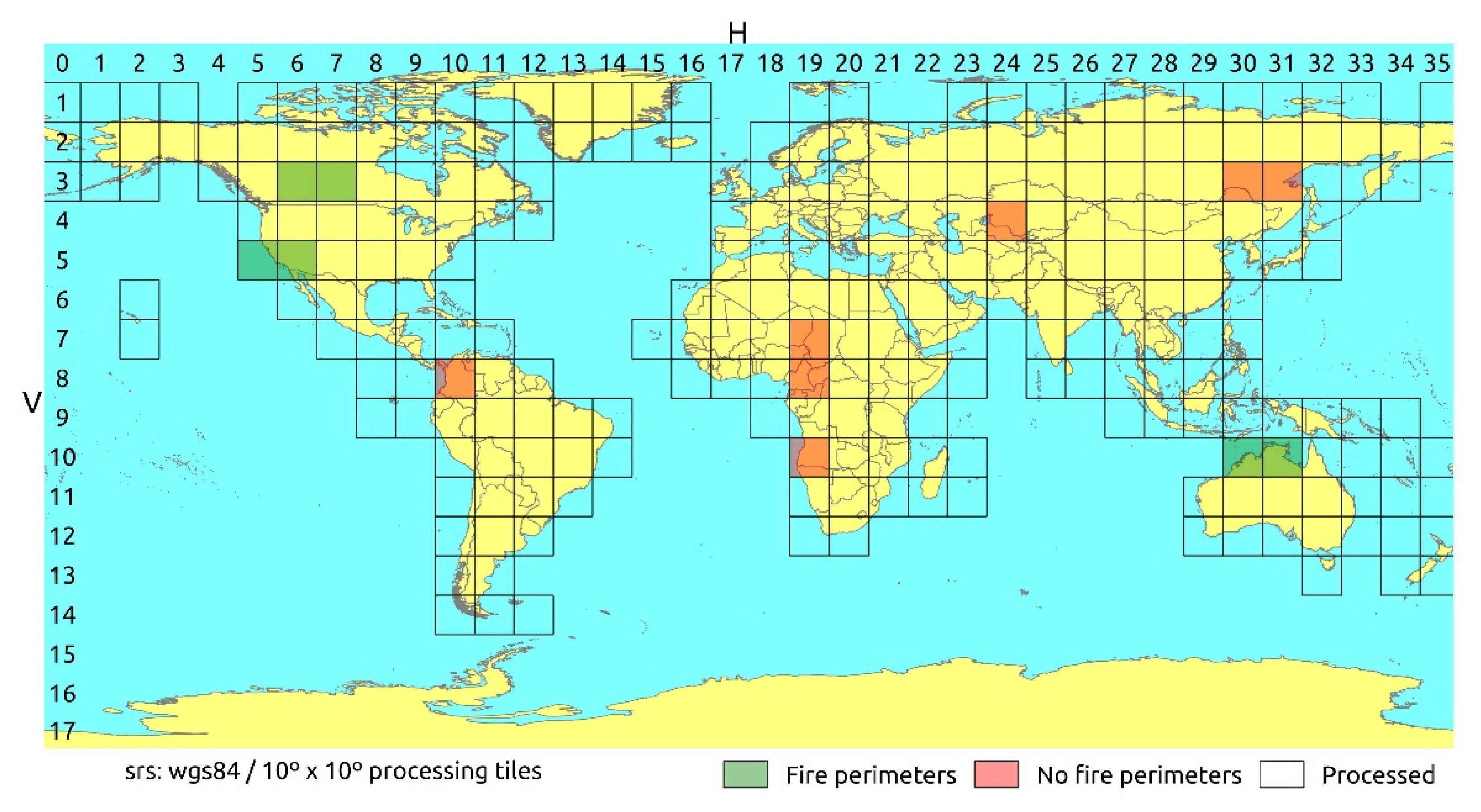
Regarding tiling effects, since both algorithms are processed following a standard tiling system, border effects may appear between adjacent tiles. A recent study that analysed this effect on the FireCCI51 and NASA’s standard BA products (MCD64A1 c6 [
85]), which follow the standard MODIS tiling system, showed that horizontal border effects were noticeable in both products [
95]. In the case of FireCCI51, border effects were mainly found in three different areas, although the most substantial one was located in Northwest India, near Pakistan. Although FireCCI51 presented a new methodology to estimate different thresholds for each fire, the first step in the algorithm still uses a tile-based threshold to perform the initial filtering of active fires. To do this, an unburned sample is selected from those pixels located further than 10 km from the nearest active fire. In the Indian case, the fire’s activity is concentrated in the southern part of the tile, and therefore, the unburned sample is mainly composed of pixels falling in the Himalayan mountainous area. This area is full of shadows, with very low NIR values, and hence the estimated threshold (10th percentile of the sample) is too low, filtering almost all the active fires in that initial step. Although C3SBA10 followed a different tiling system than the MODIS products, tiles are equally distributed every 10° in latitude, and therefore the same horizontal border effects appear in the C3SBA10 product as well.
The use of MODIS active fires may be seen as a drawback of C3SBA10, since the MODIS sensors are expected to be decommissioned ca. 2023. MODIS active fires were selected again for consistency reasons, as they were used by the FireCCI51 product for the benefit of having a long time series [
30]. The replacement of MODIS active fires with those detected by other sensors will not become effective until the end (or severe degradation) of the MODIS mission. The best options for replacement would be the VIIRS sensor, on board Suomi-NPP and NOAA-20, or the Sea and Land Surface Temperature Radiometer (SLSTR) on board S3. The VIIRS active fires application can considerably increase the detection of small fires due to its improved spatial resolution of 375 m (versus 1 km of MODIS active fires) [
48,
49], although the impact on the identification of burned patches should be studied, due to the limitations of the moderate-resolution reflectance data in detecting small burned patches. Currently, the lack of a morning overpass of the VIIRS sensor could also be a limitation, particularly considering the diurnal cycle of tropical fires [
96,
97]. Using S3 SLSTR to obtain active fires would be greatly beneficial for the C3SBA10 product, as BA processing would not require external sensors. Besides this, the current version of the active fires algorithm seems well adapted to small fires [
98]. However, this version of the algorithm is night-time-only, and consequently, provides limited sampling of the actual fire activity.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}