
Underwater Communication Using UAVs to Realize High-Speed AUV Deployment



Abstract
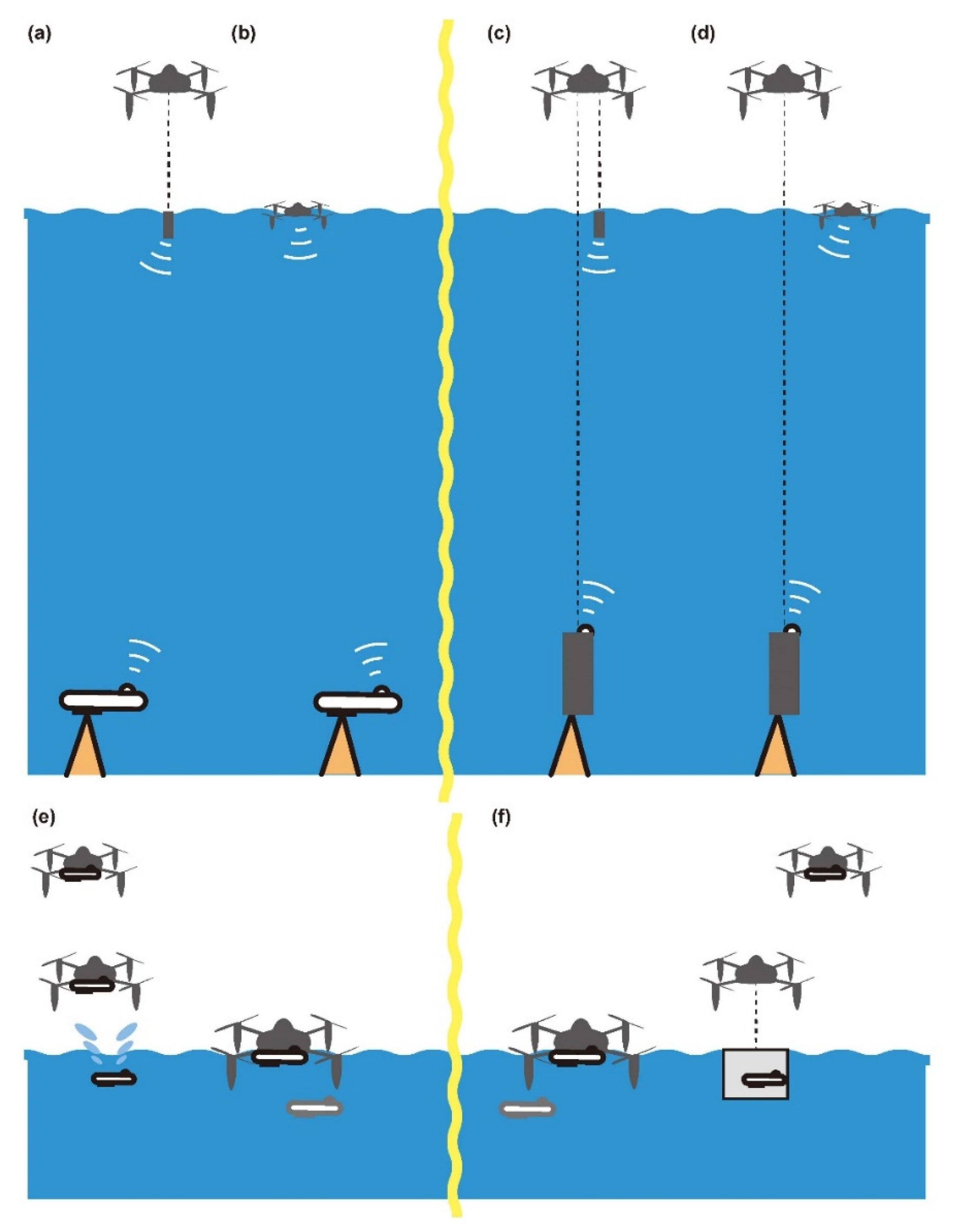
:1. Introduction
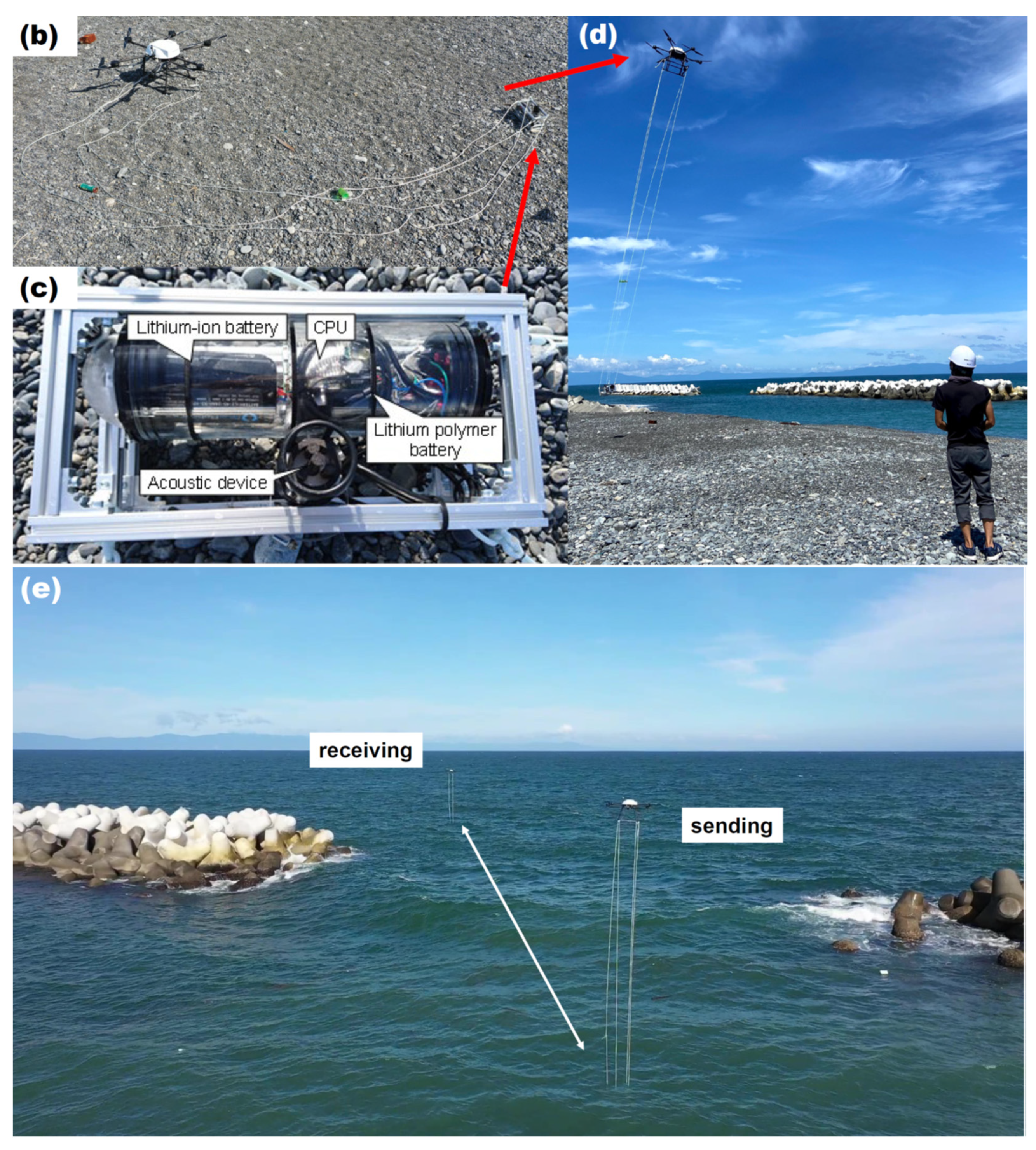
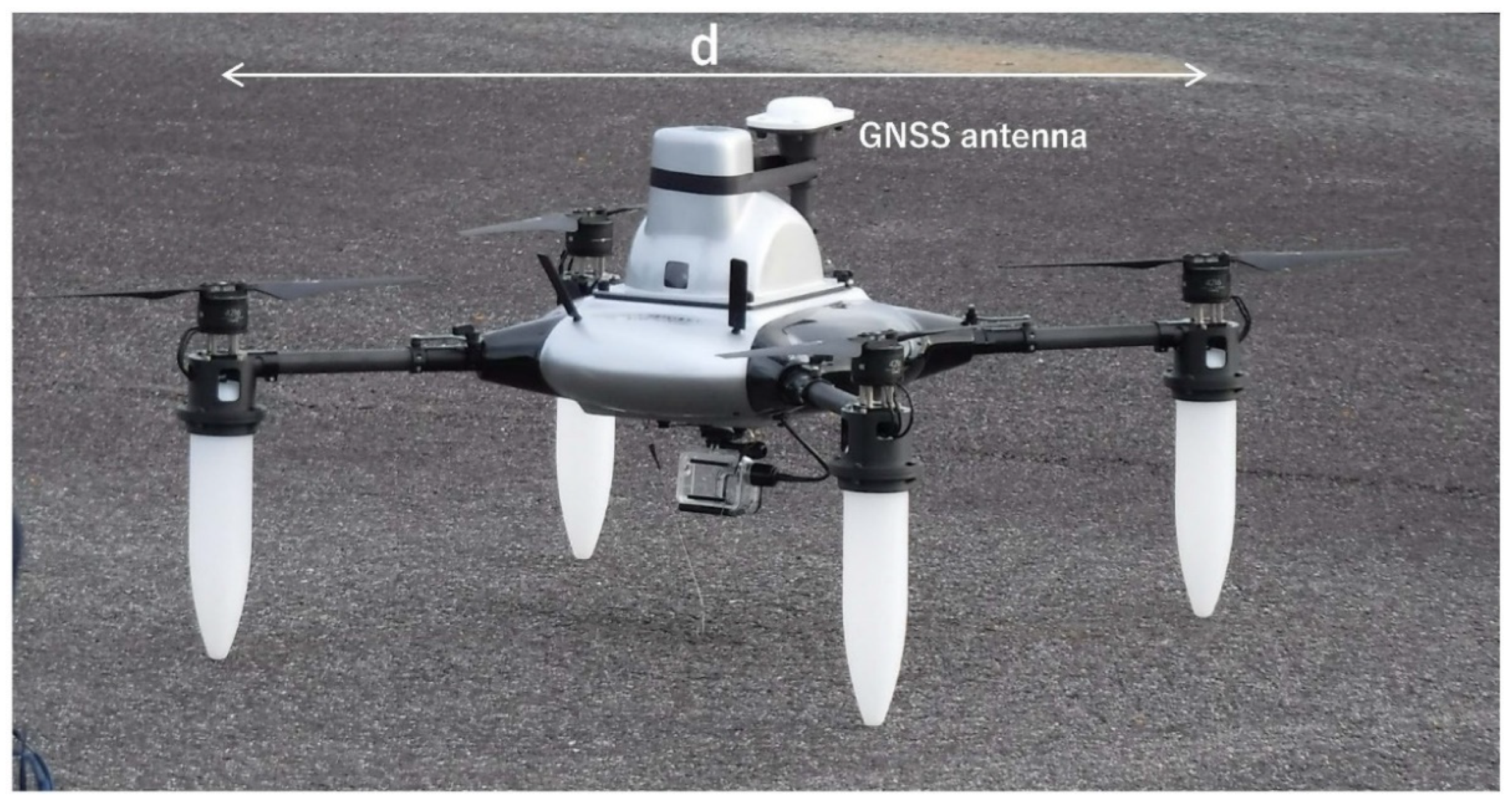
2. Materials and Methods
3. Experiments
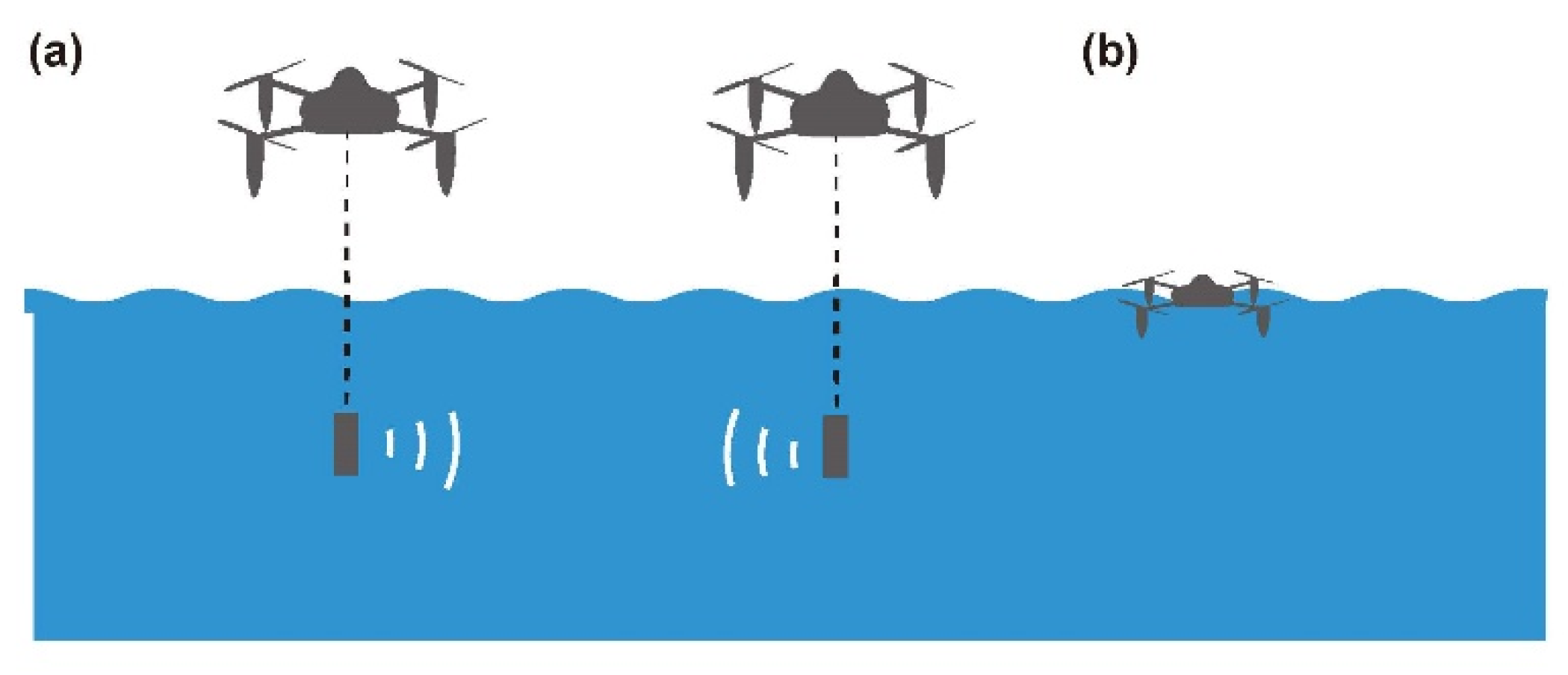
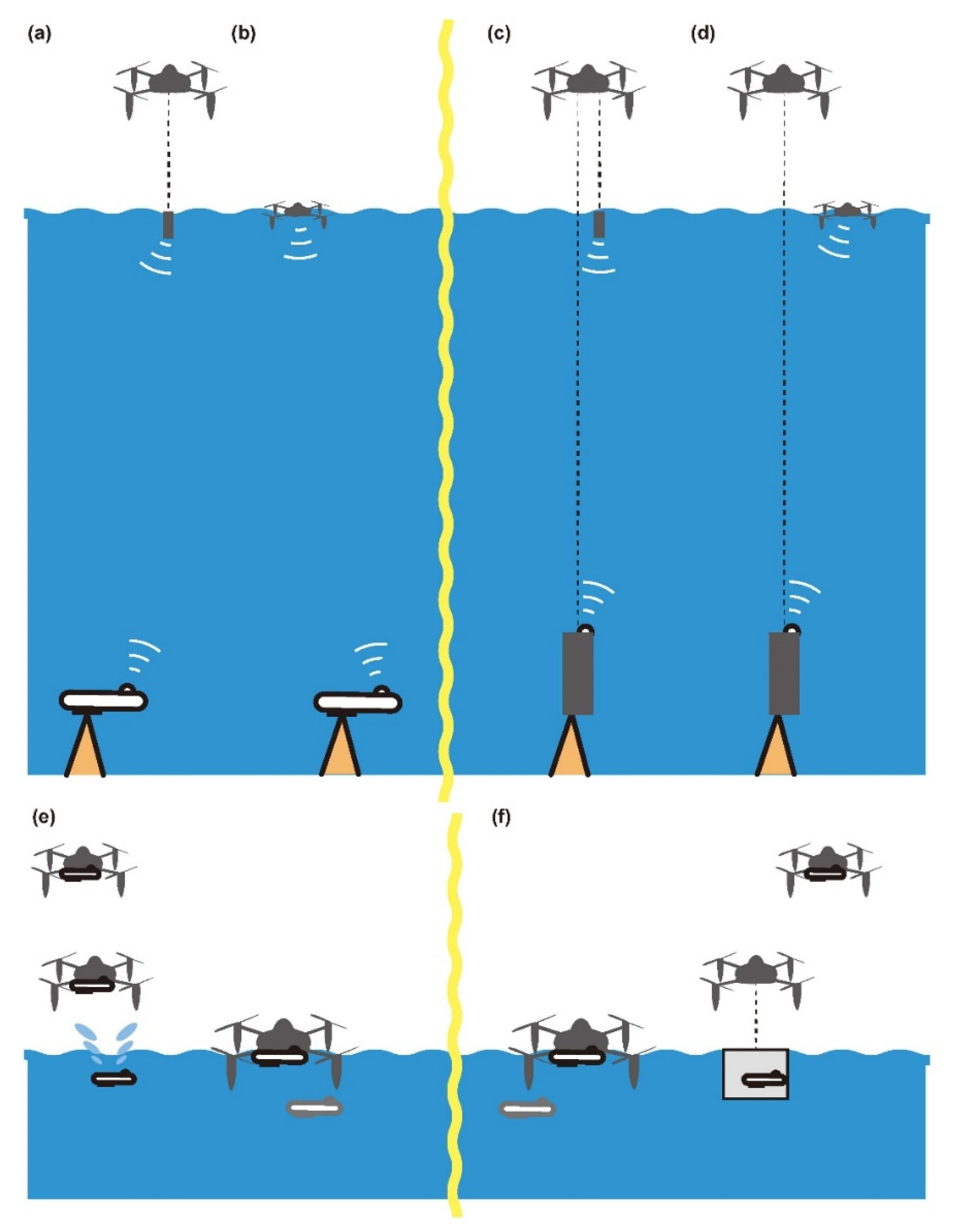
3.1. Underwater Communication with Two UAVs
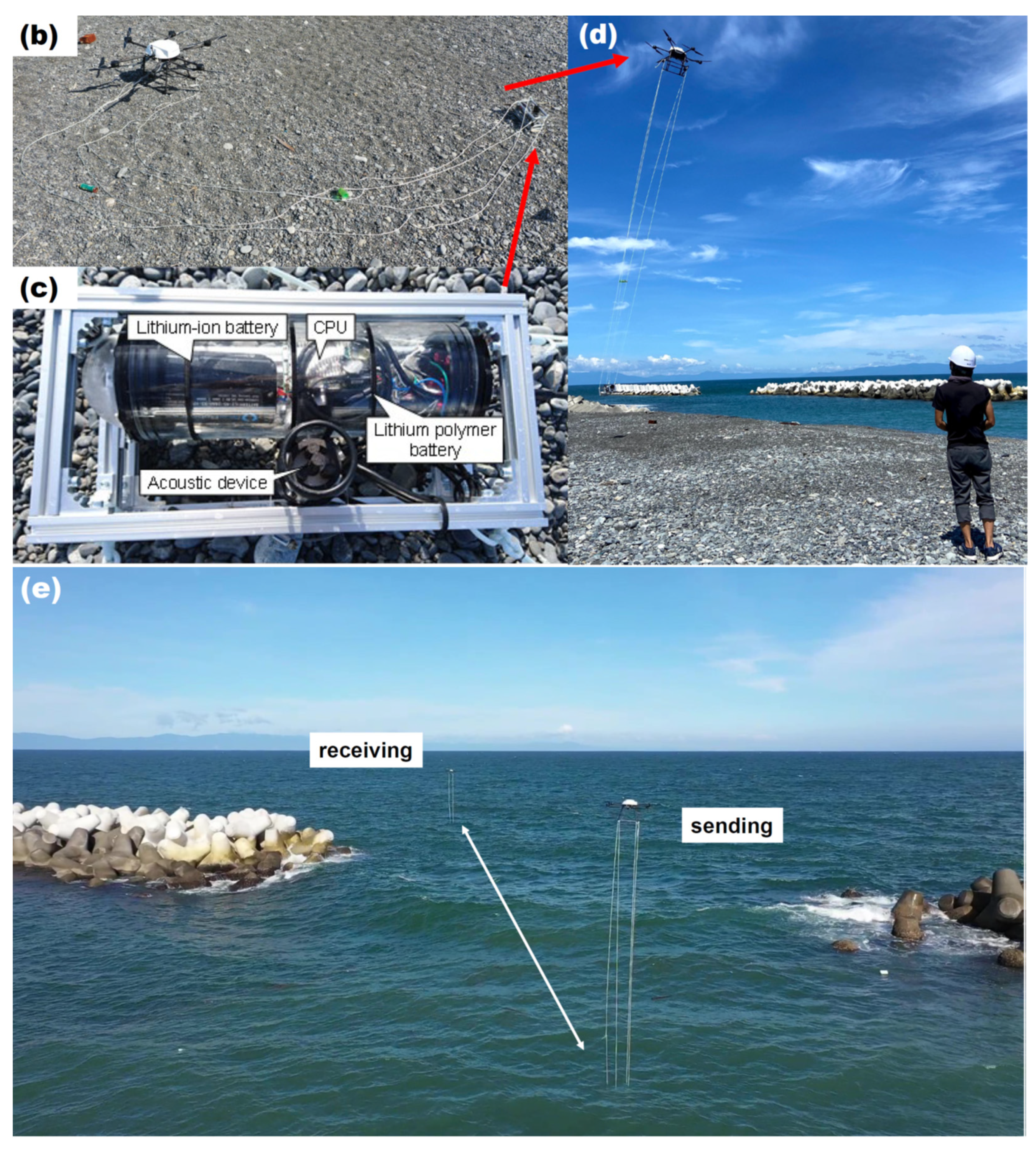
3.1.1. Settings
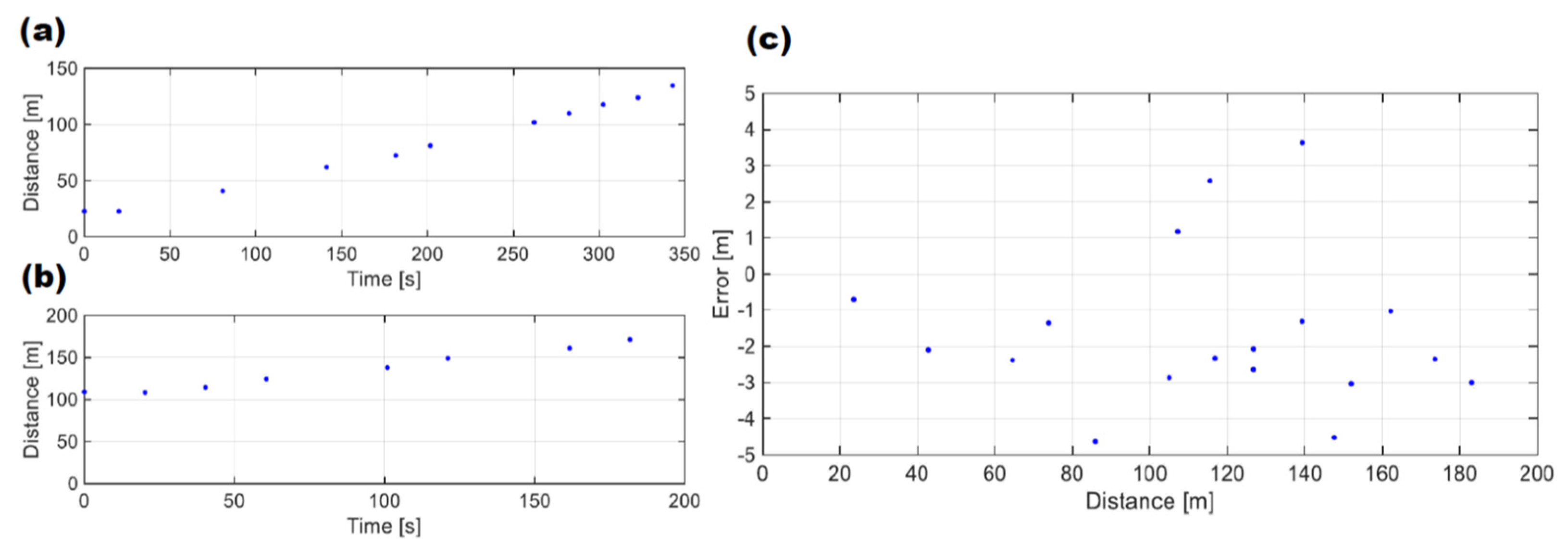
3.1.2. Results
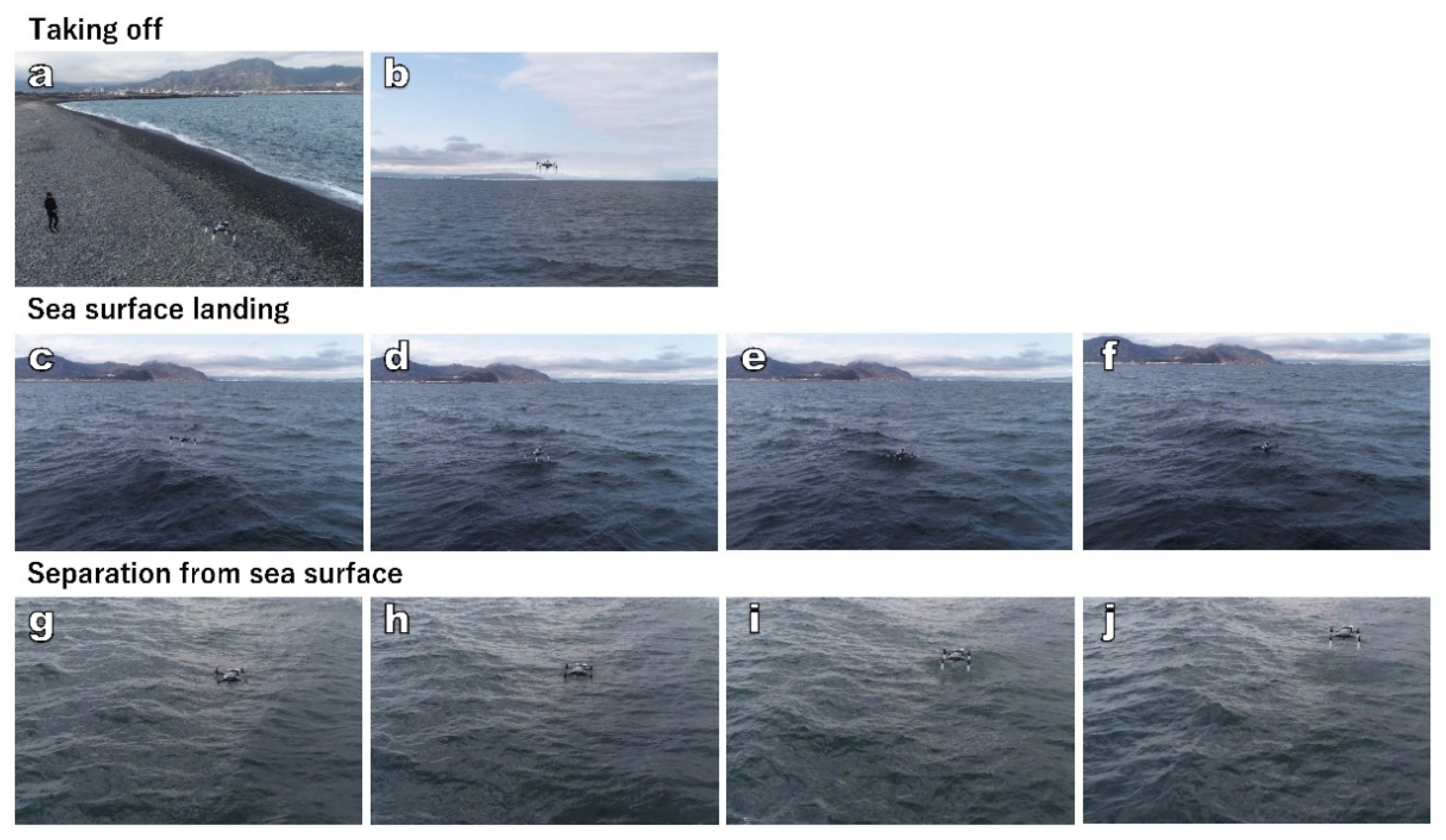
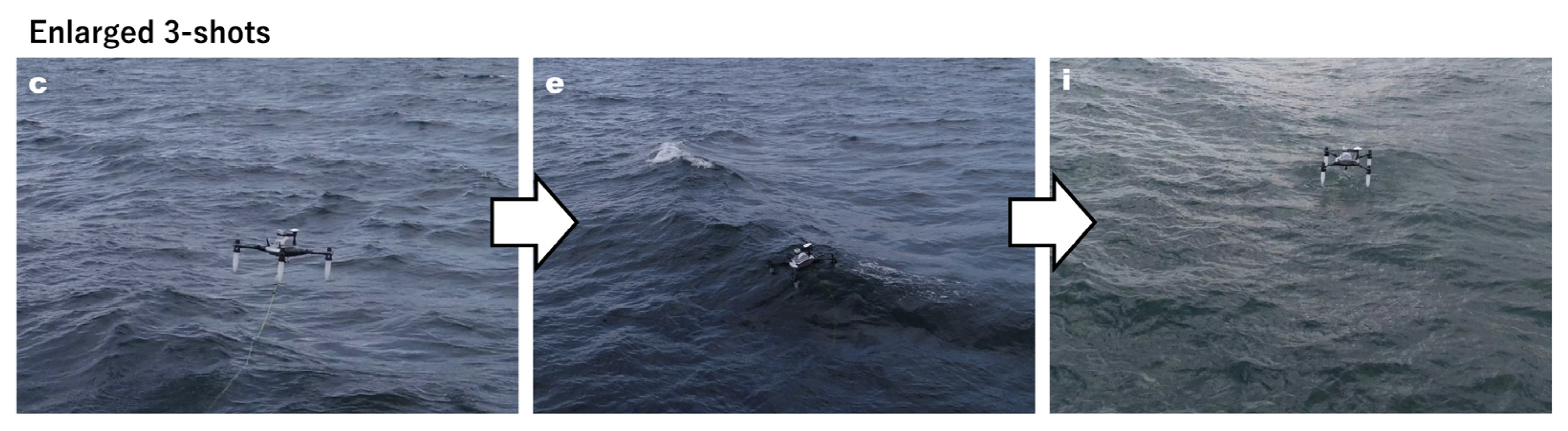
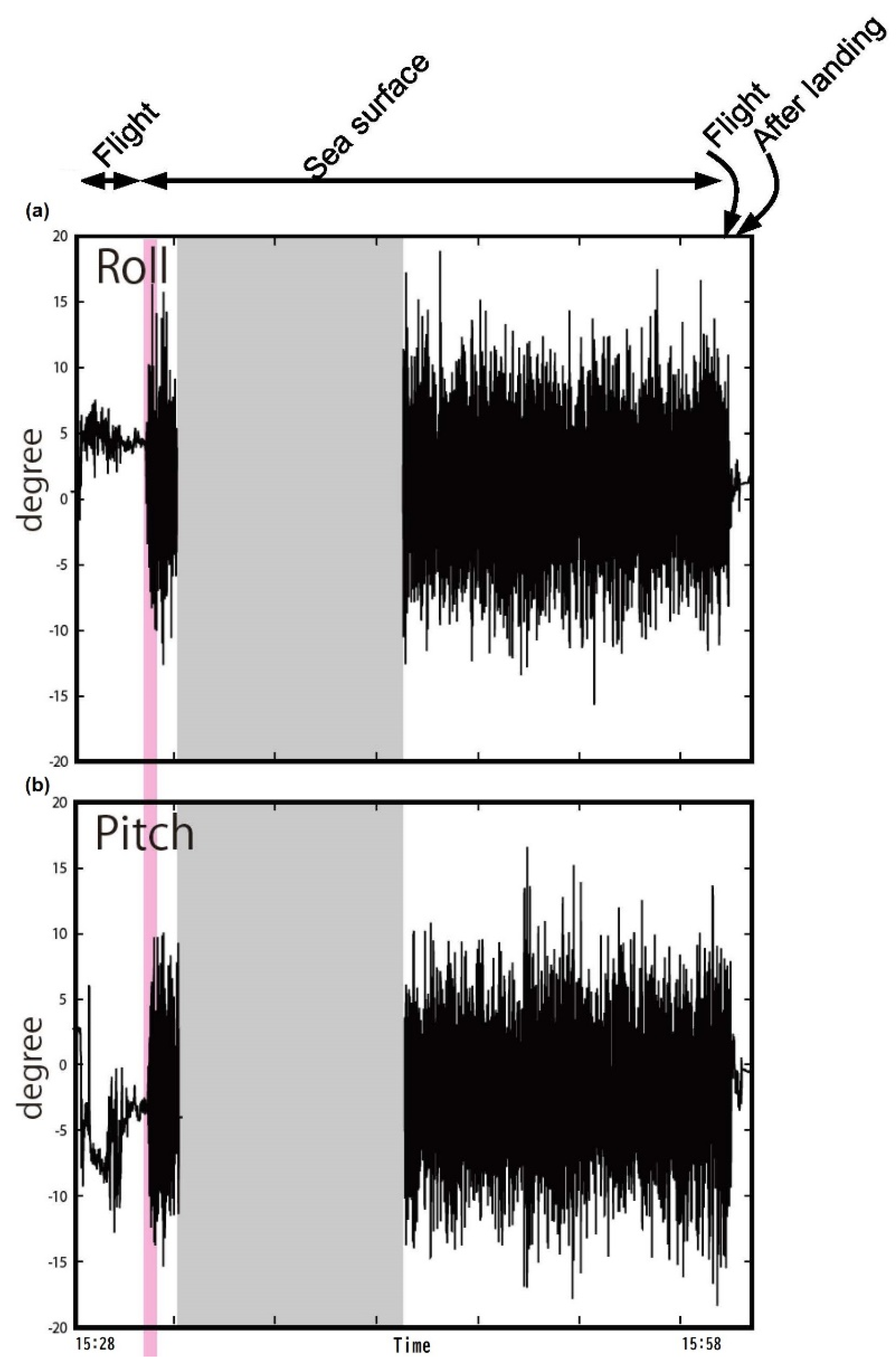
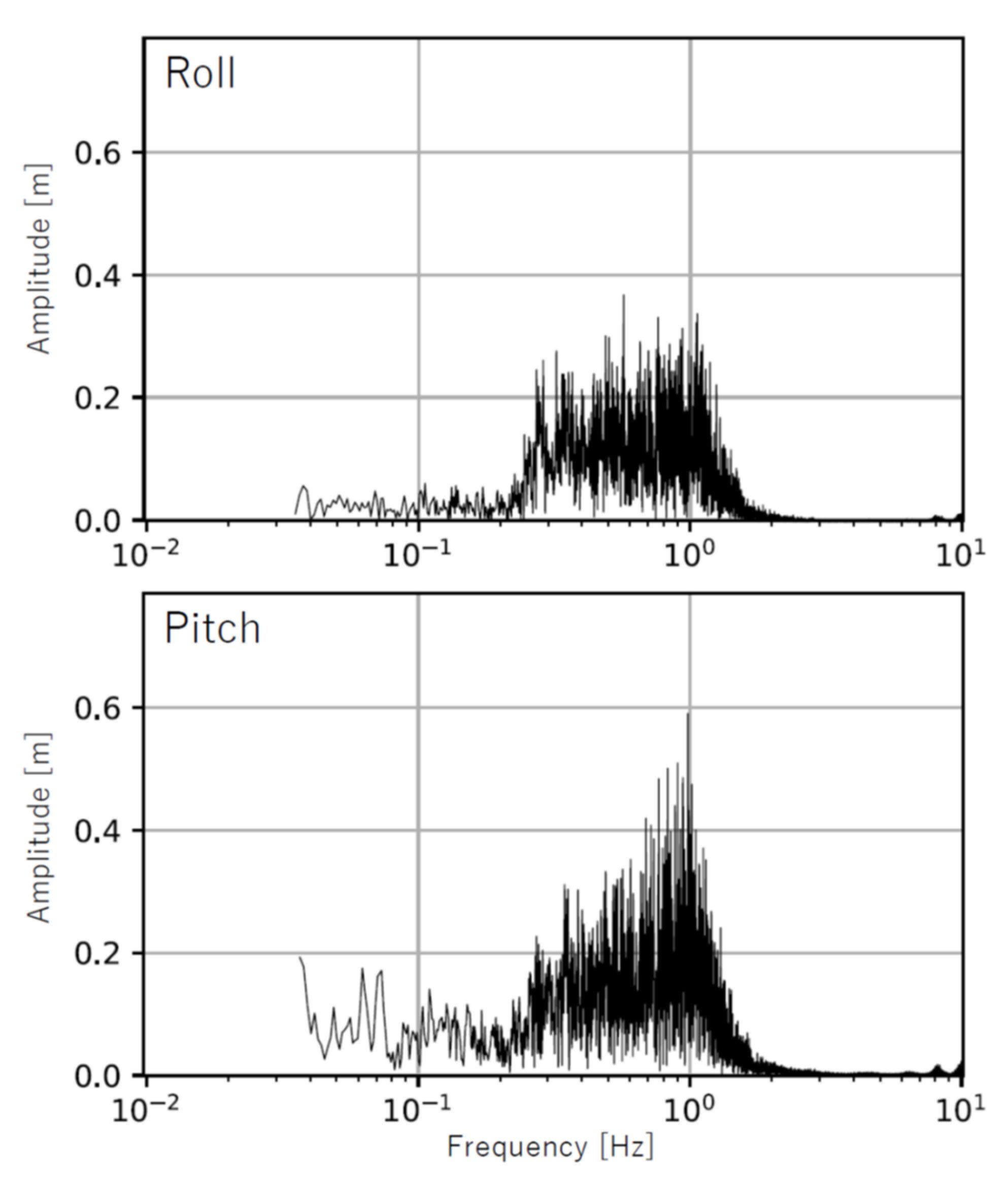
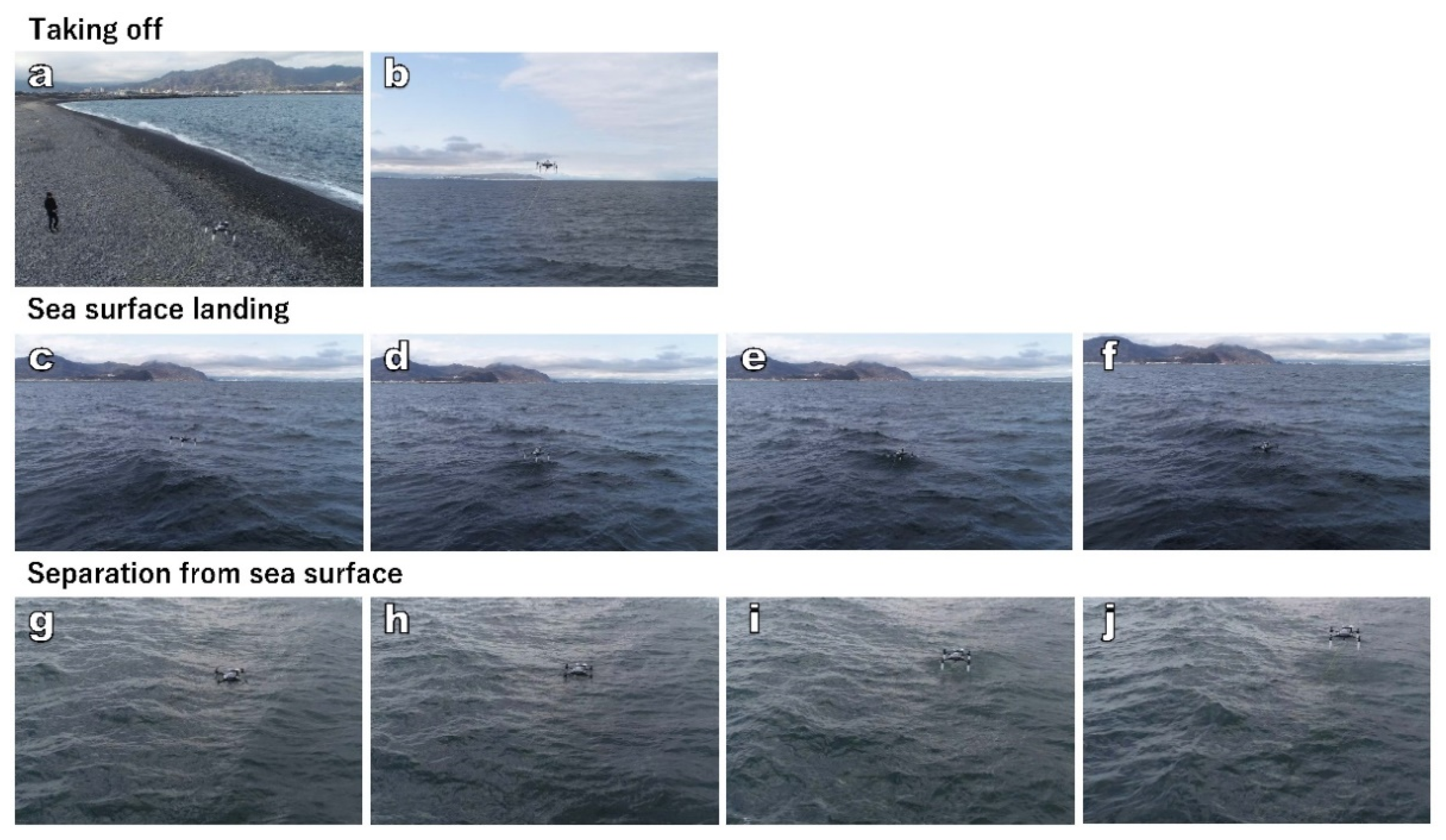
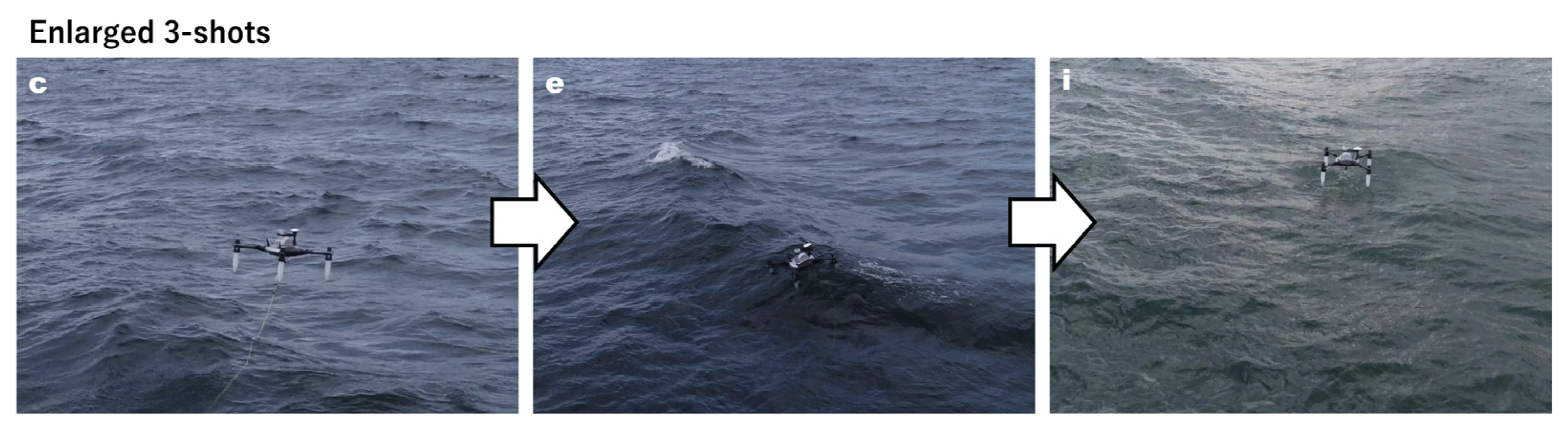
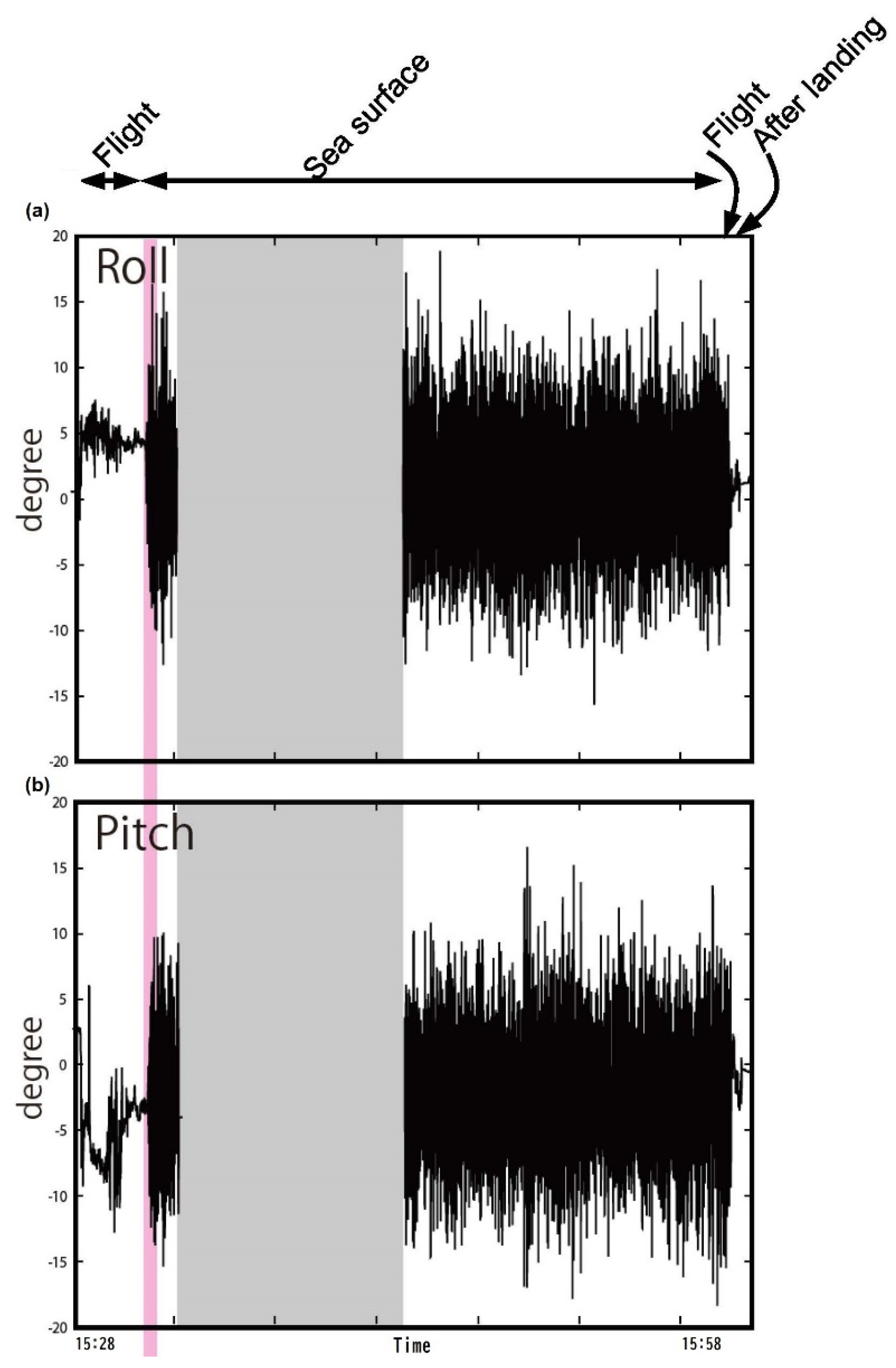
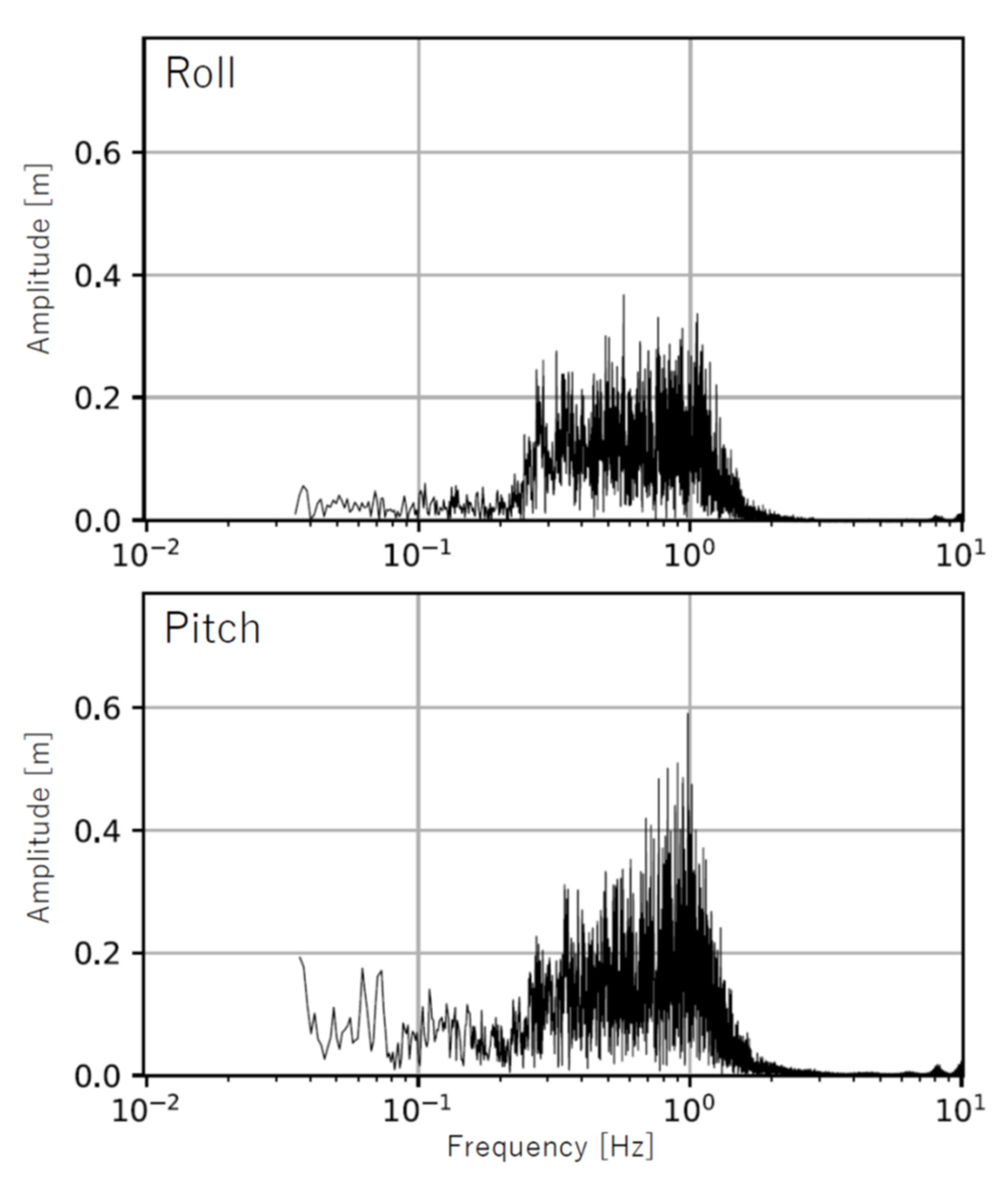
3.2. Motion Data for Sea-Surface UAV
3.2.1. Settings
3.2.2. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Allotta, B.; Costanzi, R.; Fanelli, F.; Monni, N.; Paolucci, L.; Ridolfi, A. Sea currents estimation during AUV navigation using Unscented Kalman Filter. IFAC-Papers OnLine 2017, 50, 13668–13673. [Google Scholar] [CrossRef]
- Matos, A.; Almeida, R.; Cruz, N. Man portable acoustic navigation buoys. In Proceedings of the MTS/IEEE OCEANS2016-Shanghai 2016, Shanghai, China, 10–13 June 2016. [Google Scholar] [CrossRef] [Green Version]
- Papadopoulos, G.; Fallon, M.F.; Leonard, J.J.; Patrikalakis, N.M. Cooperative Localization of Marine Vehicles using Nonlinear State Estimation. In Proceedings of the Intelligent Robots and System (IROS 2010), Taipei, Taiwan, 18–22 October 2010. [Google Scholar] [CrossRef]
- Abreu, P.C.; Bayat, M.; Botelho, J.; Góis, P.; Gomes, J.; Pascoal, A.; Ribeiro, J.; Ribeiro, M.; Rufino, M.; Sebastião, L.; et al. Cooperative formation control in the scope of the EC MORPH project: Theory and experiments. In Proceedings of the MTS/IEEE OCEANS 2015-Genova, Genova, Italy, 18–21 May 2015. [Google Scholar] [CrossRef]
- Majid, M.; Arshad, M. Design of an autonomous surface vehicle (ASV) for swarming application. In Proceedings of the IEEE/OES Autonomous Underwater Vehicles (AUV) 2016, Tokyo, Japan, 6–9 November 2016. [Google Scholar] [CrossRef]
- Ventura, D.; Bruno, M.; Lasinio, G.J.; Belluscio, A.; Ardizzone, G. A low-cost drone based application for identifying and mapping of coastal fish nursery grounds. Estua. Coast. Shelf Sci. 2016, 171, 85–98. [Google Scholar] [CrossRef]
- Yao, D.; Cheng, L.; Wu, Q.; Zhang, G.; Wu, B.; He, Y. Assessment and prediction of fishery water quality using electrochemical sensor array carried by UAV. In Proceedings of the 2019 IEEE ISOEN, Fukuoka, Japan, 26–29 May 2019. [Google Scholar] [CrossRef]
- Goerzen, C.; Long, Z.; Mettler, B. A survey of motion planning algorithms from the perspective of autonomous UAV guidance. J. Intell. Robot. Syst. 2010, 57, 65–100. [Google Scholar] [CrossRef]
- Marek, L.; Miřijovský, J.; Tuček, P. Monitoring of the Shallow Landslide Using UAV Photogrammetry and Geodetic Measurements. In Engineering Geology for Society and Territory—Volume 2; Lollino, G., Giordan, D., Crosta, G.B., Corominas, J., Azzam, R., Wasowski, J., Sciarra, N., Eds.; Springer: Cham, Switzerland, 2015. [Google Scholar] [CrossRef]
- Sujit, P.; Sousa, J.; Pereira, F.L. UAV and AUVs coordination for ocean exploration. In Proceedings of the Oceans 2009-Europe, Bremen, Germany, 11–14 May 2009. [Google Scholar] [CrossRef]
- Faria, M.; Pinto, J.; Py, F.; Fortuna, J.; Dias, H.; Martins, R.; Leira, F.; Johansen, T.A.; Sousa, J.; Rajan, K. Coordinating UAVs and AUVs for oceanographic field experiments: Challenges and lessons learned. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6606–6611. [Google Scholar] [CrossRef] [Green Version]
- Ravell, D.A.M.; Maia, M.M.; Diez, F.J. Modeling and control of unmanned aerial/underwater vehicles using hybrid control. Control Eng. Pract. 2018, 76, 112–122. [Google Scholar] [CrossRef]
- Wu, Y. Coordinated path planning for an unmanned aerial-aquatic vehicle (UAAV) and an autonomous underwater vehicle (AUV) in an underwater target strike mission. Ocean Eng. 2019, 182, 162–173. [Google Scholar] [CrossRef]
- Ivanovic, A.; Polic, M.; Salah, O.; Orsag, M.; Bogdan, S. Compliant net for AUV retrieval using a UAV. IFAC-Papers OnLine 2018, 51, 431–437. [Google Scholar] [CrossRef]
- Watanabe, K.; Utsunomiya, K.; Harada, K.; Watanabe, Y. A Concept of Coastal Sea Monitoring System from Sky to Water. In Proceedings of the 3rd World Congress on Civil, Structural, and Environmental Engineering (CSEE’18), Budapest, Hungary, 8–10 April 2018. [Google Scholar] [CrossRef]
- Takasu, T. RTKLIB Ver. 2.4.2: An Open Source Program Package for GNSS Positioning. Available online: http://www.rtklib.com/ (accessed on 18 October 2021).
- Guerrero-Sánchez, M.-E.; Hernández-González, O.; Lozano, R.; García-Beltrán, C.-D.; Valencia-Palomo, G.; López-Estrada, F.-R. Energy-based control and LMI-based control for a quadrotor transporting a payload. Mathematics 2019, 7, 1090. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time [hour] (JST, UTC+0900) | Action |
|---|---|
| 14:44 | Takeoff |
| 14:46 | Measurement start |
| 14:52 | Measurement end |
| 14:54 | Landing |
| 16:23 | Takeoff |
| 16:25 | Measurement start |
| 16:30 | Measurement end |
| 16:32 | Landing |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yokota, Y.; Matsuda, T. Underwater Communication Using UAVs to Realize High-Speed AUV Deployment. Remote Sens. 2021, 13, 4173. https://doi.org/10.3390/rs13204173
Yokota Y, Matsuda T. Underwater Communication Using UAVs to Realize High-Speed AUV Deployment. Remote Sensing. 2021; 13(20):4173. https://doi.org/10.3390/rs13204173
Chicago/Turabian StyleYokota, Yusuke, and Takumi Matsuda. 2021. "Underwater Communication Using UAVs to Realize High-Speed AUV Deployment" Remote Sensing 13, no. 20: 4173. https://doi.org/10.3390/rs13204173
APA StyleYokota, Y., & Matsuda, T. (2021). Underwater Communication Using UAVs to Realize High-Speed AUV Deployment. Remote Sensing, 13(20), 4173. https://doi.org/10.3390/rs13204173