
Multi-Dimensional Automatic Detection of Scanning Radar Images of Marine Targets Based on Radar PPInet


Abstract
:
1. Introduction
- (1)
- An effective and efficient marine target detection network (Radar-PPInet) is proposed for scanning radar PPI images. It uses the multi-dimensional information, i.e., range-azimuth-interframe, and breaks through the limitations of traditional statistical detection methods, i.e., not limited by the assumptions of the environment model. It can adaptively learn the characteristics of the target and clutter and improve the generalization ability.
- (2)
- The proposed Radar-PPInet includes four contributions. Firstly, the prediction frame coordinates, target category, and corresponding confidence are directly given through the feature extraction network in Radar-PPInet. The network structure is lightened, and at the same time it shows good performance for the detection accuracy and speed. Secondly, the network structure strengthens the receptive field and the attention distribution structure. Through repeated use of the feature map extracted after convolution, that is, multiple up and down sampling and residual stacking are performed, which further strengthens the network training efficiency. Thirdly, the power non-maximum suppression (P-NMS) is designed to screen the final target detection frame, which can effectively improve the problem of missed detection of multi-targets. Lastly, a multi-frame information fusion strategy is proposed to further reduce false alarms, i.e., strong sea clutter, such as sea spikes.
2. Materials and Methods
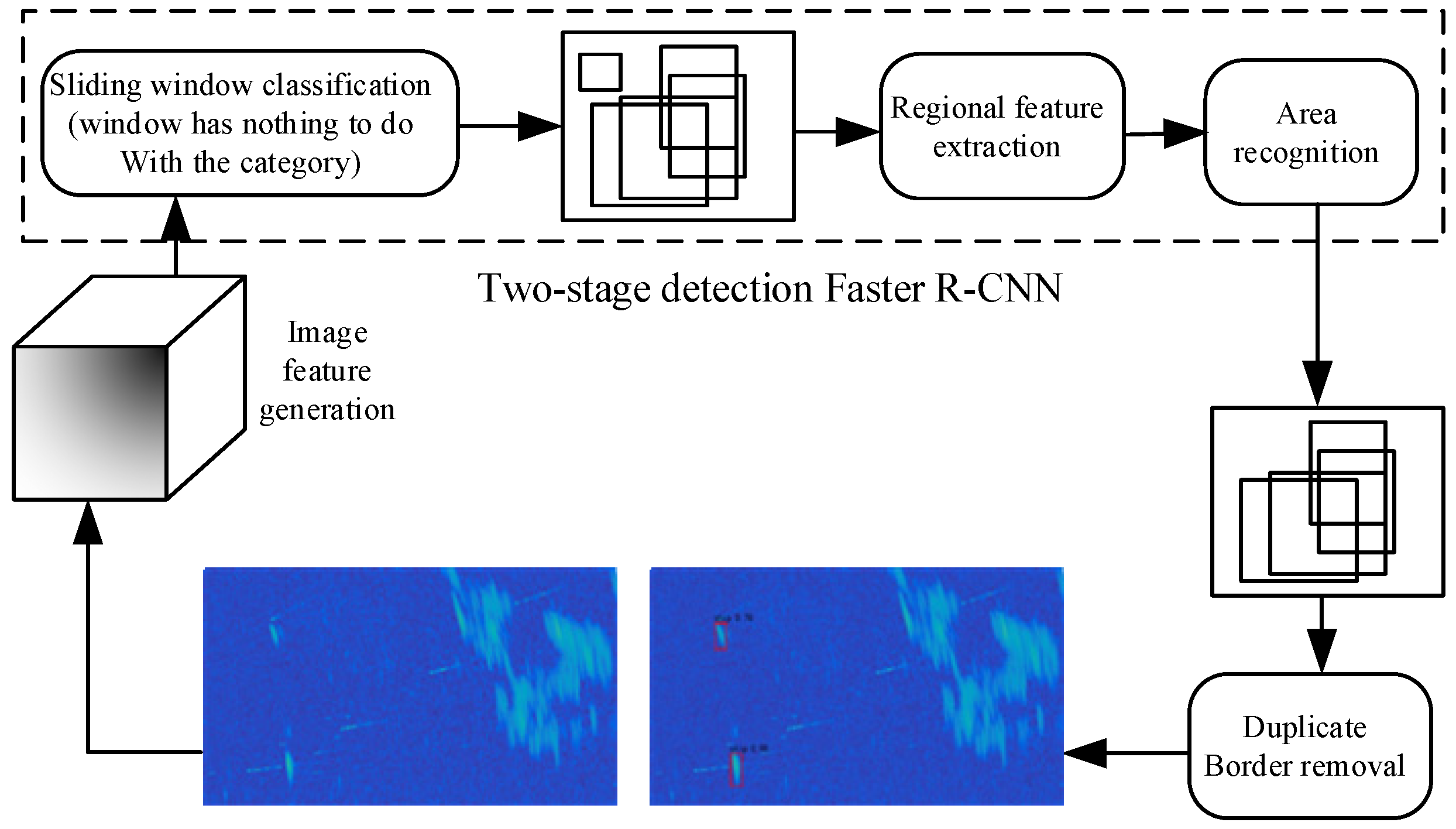
2.1. Radar PPI Image Target Detection Based on the Two-Stage Detection Algorithm Faster R-CNN
- (1)
- Generate anchors;
- (2)
- Do regression on all anchors using dx(A), dy(A), dw(A), dh(A);
- (3)
- Sort the anchors from large to small according to the input positive softmax scores and extract the positive anchors after the correction position;
- (4)
- Limit the positive anchors beyond the image boundary as the image boundary to prevent the proposal exceeding the image boundary;
- (5)
- Remove the very small positive anchors;
- (6)
- Perform non-maximum suppression (NMS) on the remaining positive anchors;
- (7)
- Output the proposals.
2.2. Radar PPI Image Target Detection Based on Radar-PPInet
2.2.1. Introduction to the Traditional YOLO Model
2.2.2. The Structure of Novel Radar-PPInet
2.2.3. Sea Clutter False Alarms Reduction via Multi-Frame Fusion
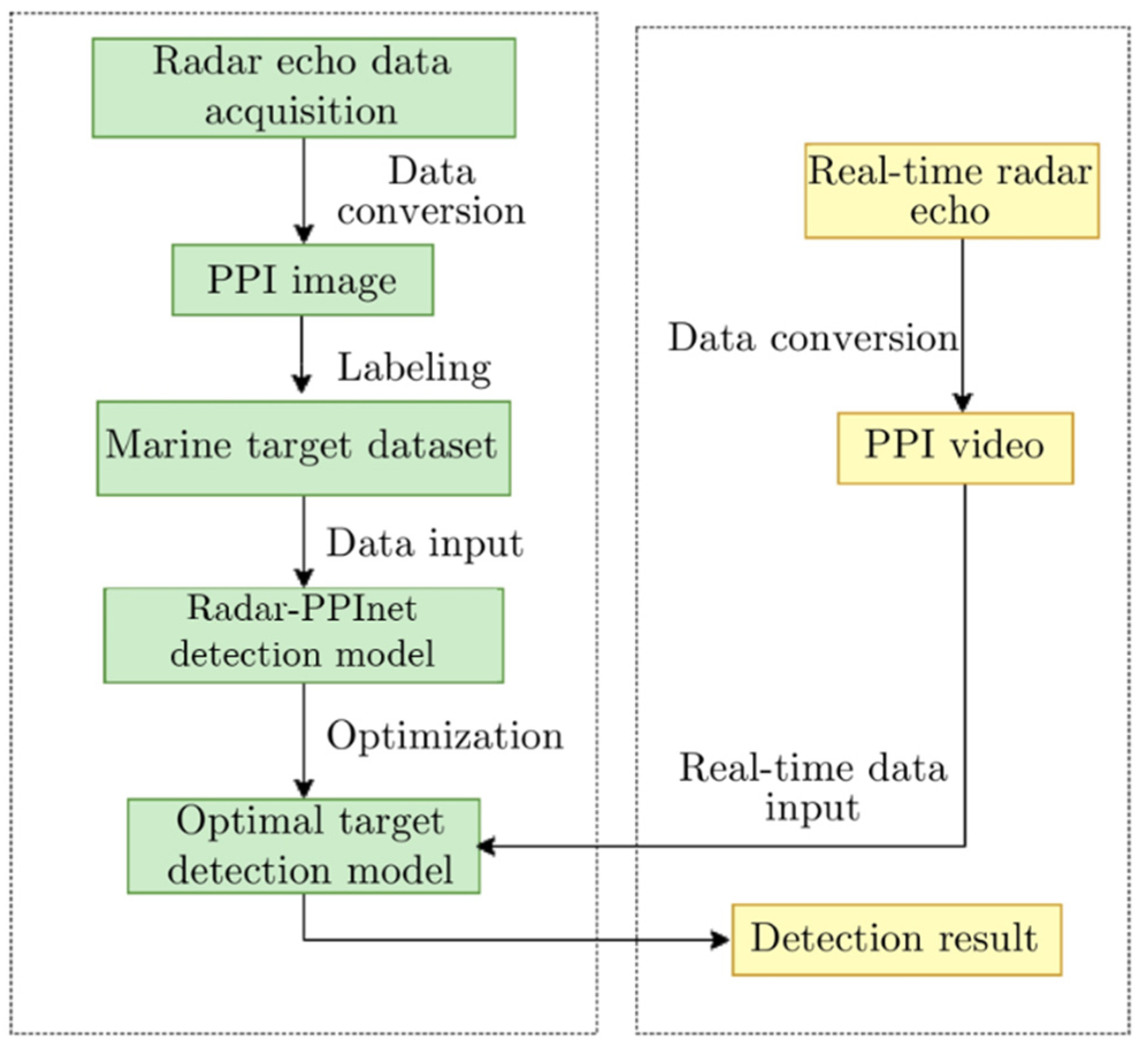
2.2.4. The PPI Image Detection Procedure via Radar-PPInet
- (1)
- Scanning radar echo data preprocessing, such as sensitivity-time control (STC), in order to suppress the short-range strong clutter. This step is generally used for a high sea state environment.
- (2)
- Collect and record radar echo data, and convert the echo data into PPI images.
- (3)
- Construct a marine target image dataset. Crop PPI images, and use AIS and other information to mark and label marine targets.
- (4)
- Establish the radar image target detection network (Radar-PPInet), which mainly includes CSPDarknet53, SPP, PANet, PNMS, and multi-frame fusion.
- (5)
- Train and optimize the model. The PPI images dataset is input to the Radar-PPInet model for iterative training, and the initial training parameters of the model are adjusted and optimized to obtain the optimal network parameters;
- (6)
- Generate images from real-time radar echoes, input them into the trained Radar-PPInet target detection model for testing, and obtain target detection results.
3. Experimental Results and Analysis
3.1. Marine Radar PPI Images Datasets
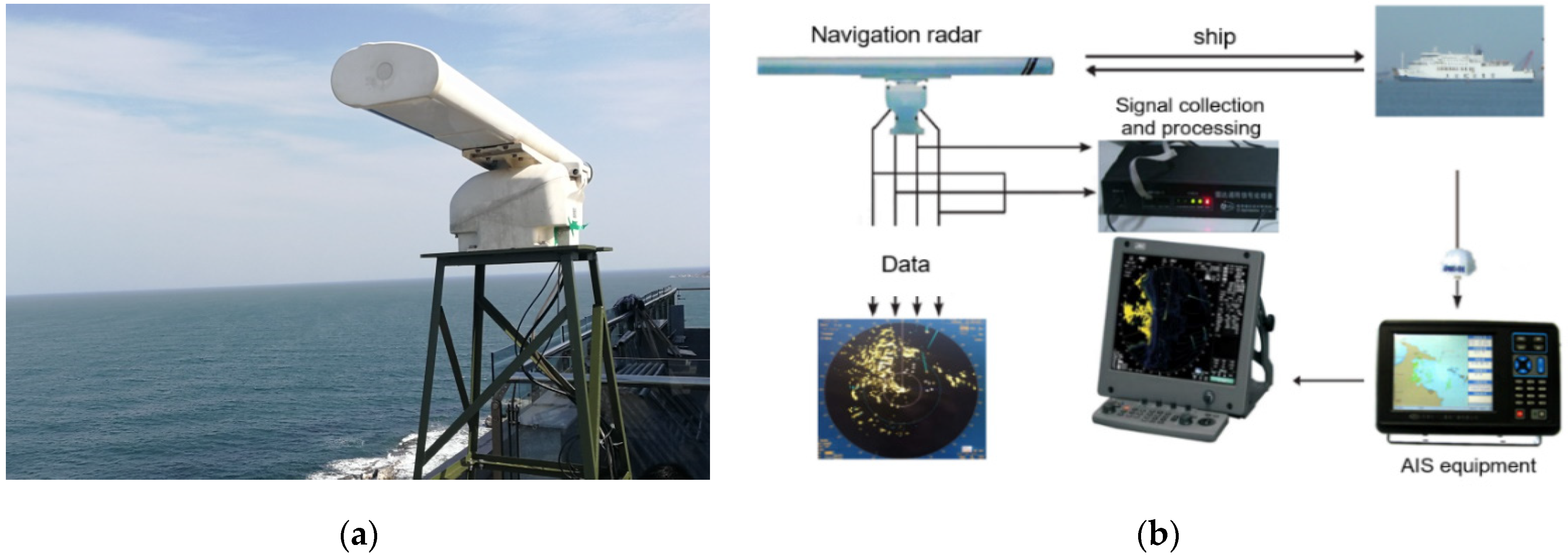
3.1.1. Navigation Radar Data Acquisition
3.1.2. Radar PPI Images Dataset Construction
3.2. Marine Target Detection Results of Faster R-CNN and Radar-PPInet
4. Discussion
4.1. Detection Performance Discussion of CFAR, Faster R-CNN, and Radar-PPInet
4.2. Computational Burden Discussion between Faster R-CNN and Radar-PPInet
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, J.-Y. Development Laws and Macro Trends Analysis of Radar Technology. J. Radars 2012, 1, 19–27. [Google Scholar] [CrossRef]
- Lee, M.-J.; Kim, J.-E.; Ryu, B.-H.; Kim, K.-T. Robust Maritime Target Detector in Short Dwell Time. Remote Sens. 2021, 13, 1319. [Google Scholar] [CrossRef]
- Yan, H.; Chen, C.; Jin, G.; Zhang, J.; Wang, X.; Zhu, D. Implementation of a modified faster R-CNN for target detection technology of coastal defense radar. Remote Sens. 2021, 13, 1703. [Google Scholar] [CrossRef]
- Kuang, C.; Wang, C.; Wen, B.; Hou, Y.; Lai, Y. An improved CA-CFAR method for ship target detection in strong clutter using UHF radar. IEEE Signal Process. Lett. 2020, 27, 1445–1449. [Google Scholar] [CrossRef]
- Acosta, G.G.; Villar, S.A. Accumulated CA–CFAR process in 2-d for online object detection from sidescan sonar data. IEEE J. Ocean. Eng. 2015, 40, 558–569. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, G.; Doviak, R.J. Ground clutter detection using the statistical properties of signals received with a polarimetric radar. IEEE Trans. Signal Process. 2014, 62, 597–606. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Bao, Z.; He, Y. Detection and extraction of target with micromotion in spiky sea clutter via short-time fractional Fourier transform. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1002–1018. [Google Scholar] [CrossRef]
- Xu, S.; Zhu, J.; Jiang, J.; Shui, P. Sea-surface floating small target detection by multifeature detector based on isolation forest. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 704–715. [Google Scholar] [CrossRef]
- Ma, Y.; Hong, H.; Zhu, X. Multiple moving-target indication for urban sensing using change detection-based compressive sensing. IEEE Geosci. Remote Sens. Lett. 2021, 18, 416–420. [Google Scholar] [CrossRef]
- Ash, M.; Ritchie, M.; Chetty, K. On the application of digital moving target indication techniques to short-range FMCW radar data. IEEE Sens. J. 2018, 18, 4167–4175. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Chen, X.; Huang, Y.; Zhang, L.; Guan, J.; He, Y. Radar moving target detection in clutter background via adaptive dual-threshold sparse Fourier transform. IEEE Access 2019, 7, 58200–58211. [Google Scholar] [CrossRef]
- Meiyan, P.; Jun, S.; Yuhao, Y.; Dasheng, L.; Sudao, X.; Shengli, W.; Jianjun, C. Improved TQWT for marine moving target detection. J. Syst. Eng. Electron. 2020, 31, 470–481. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Liu, N.; He, Y. Maneuvering target detection via radon-fractional Fourier transform-based long-time coherent integration. IEEE Trans. Signal Process. 2014, 62, 939–953. [Google Scholar] [CrossRef]
- Niu, Z.; Zheng, J.; Su, T.; Li, W.; Zhang, L. Radar high-speed target detection based on improved minimalized windowed RFT. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 870–886. [Google Scholar] [CrossRef]
- Chen, X.; Su, N.; Huang, Y.; Guan, J. False-alarm-controllable radar detection for marine target based on multi features fusion via CNNs. IEEE Sens. J. 2021, 21, 9099–9111. [Google Scholar] [CrossRef]
- Chen, S.; Wang, H.; Xu, F.; Jin, Y. Target classification using the deep convolutional networks for SAR images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4806–4817. [Google Scholar] [CrossRef]
- Wu, Z.; Li, M.; Wang, B.; Quan, Y.; Liu, J. Using artificial intelligence to estimate the probability of forest fires in Heilongjiang, northeast China. Remote Sens. 2021, 13, 1813. [Google Scholar] [CrossRef]
- Feng, Z.; Zhu, M.; Stanković, L.; Ji, H. Self-matching CAM: A novel accurate visual explanation of CNNs for SAR image interpretation. Remote Sens. 2021, 13, 1772. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Khaleghian, S.; Ullah, H.; Kræmer, T.; Hughes, N.; Eltoft, T.; Marinoni, A. Sea ice classification of SAR imagery based on convolution neural networks. Remote Sens. 2021, 13, 1734. [Google Scholar] [CrossRef]
- Wan, J.; Chen, B.; Liu, Y.; Yuan, Y.; Liu, H.; Jin, L. Recognizing the HRRP by combining CNN and BiRNN with attention mechanism. IEEE Access 2020, 8, 20828–20837. [Google Scholar] [CrossRef]
- Pan, M.; Jiang, J.; Kong, Q.; Shi, J.; Sheng, Q.; Zhou, T. Radar HRRP target recognition based on t-SNE segmentation and discriminant deep belief network. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1609–1613. [Google Scholar] [CrossRef]
- Feng, X.; Zhang, W.; Su, X.; Xu, Z. Optical Remote sensing image denoising and super-resolution reconstructing using optimized generative network in wavelet transform domain. Remote Sens. 2021, 13, 1858. [Google Scholar] [CrossRef]
- Mou, X.; Chen, X.; Guan, J.; Dong, Y.; Liu, N. Sea clutter suppression for radar PPI images based on SCS-GAN. IEEE Geosci. Remote Sens. Lett. 2020. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, H.; Xu, F.; Jin, Y. Complex-valued convolutional neural network and its application in polarimetric SAR image classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 7177–7188. [Google Scholar] [CrossRef]
- Minar, M.R.; Naher, J. Recent advances in deep learning: An overview. arXiv 2018, arXiv:1807.08169. [Google Scholar]
- Avola, D.; Cinque, L.; Diko, A.; Fagioli, A.; Foresti, G.L.; Mecca, A.; Pannone, D.; Piciarelli, C. MS-Faster R-CNN: Multi-stream backbone for improved Faster R-CNN object detection and aerial tracking from UAV images. Remote Sens. 2021, 13, 1670. [Google Scholar] [CrossRef]
- Xi, D.; Qin, Y.; Luo, J.; Pu, H.; Wang, Z. Multipath fusion mask R-CNN with double attention and its application into gear pitting detection. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Li, H.; Deng, L.; Yang, C.; Liu, J.; Gu, Z. Enhanced YOLO v3 tiny network for real-time ship detection from visual image. IEEE Access 2021, 9, 16692–16706. [Google Scholar] [CrossRef]
- Wang, Z.; Du, L.; Mao, J.; Liu, B.; Yang, D. SAR target detection based on SSD with data augmentation and transfer learning. IEEE Geosci. Remote Sens. Lett. 2019, 16, 150–154. [Google Scholar] [CrossRef]
- Mou, X.; Chen, X.; Guan, J.; Chen, B.; Dong, Y. Marine target detection based on improved faster R-CNN for navigation radar ppi images. In Proceedings of the 2019 International Conference on Control, Automation and Information Sciences (ICCAIS), Chengdu, China, 23–26 October 2019. [Google Scholar]
- Su, N.; Chen, X.; Guan, J.; Mou, X.; Liu, N. Detection and classification of maritime target with micro-motion based on CNNs. J. Radars 2018, 7, 565–574. [Google Scholar]
- Mou, X.; Chen, X.; Guan, J. Clutter suppression and marine target detection for radar images based on INet. J. Radars 2020, 9, 640–653. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H. YOLOv4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Wang, D.; Chen, X.; Yi, H.; Zhao, F. Improvement of non-maximum suppression in RGB-D object detection. IEEE Access 2019, 7, 144134–144143. [Google Scholar] [CrossRef]
- Liu, N.; Dong, Y.; Wang, G. Sea-detecting X-band radar and data acquisition program. J. Radars 2019, 8, 656–667. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Working frequency | X band |
| Operating frequency range | 9.3~9.5 GHz |
| Range scope | 0.0625~96 nm |
| Bandwidth | 25 MHz |
| Range resolution | 6 m |
| Pulse repetition frequency | 1.6 KHz, 3 KHz, 5 KHz, 10 KHz |
| Transmit peak power | 50 W |
| Antenna speed | 2 rpm, 12 rpm, 24 rpm, 48 rpm |
| Antenna length | 1.8 m |
| Antenna polarization mode | HH |
| Antenna horizontal beam width | 1.2° |
| Antenna vertical beam width | 22° |
| Moving Target | Stationary Target | Large Target | Small Target | |
|---|---|---|---|---|
| Target |  |  |  |  |
| Land |  | |||
| Clutter |  | |||
| Environments | Methods | Recall | Precision | FAR | FPS * |
|---|---|---|---|---|---|
| Coastal environment | Faster R-CNN | 78% | 97.6% | 2.4% | 2.74 |
| Radar-PPInet | 83.3% | 99.2% | 0.8% | 3.95 | |
| Open sea environment | Faster R-CNN | 84% | 98.4% | 1.6% | 3.12 |
| Radar-PPInet | 100% | 100% | 0% | 4.15 |
| Pfa = 10−4 | Pfa = 10−3 | |
|---|---|---|
| 2D CA-CFAR | 58.4% | 75.6% |
| Faster R-CNN | 64.7% | 78.4% |
| Radar-PPInet (without multi-frame fusion) | 76.5% | 83.3% |
| Radar-PPInet (with multi-frame fusion, 3/5 criteria) | 82.3% | 89.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Guan, J.; Mu, X.; Wang, Z.; Liu, N.; Wang, G. Multi-Dimensional Automatic Detection of Scanning Radar Images of Marine Targets Based on Radar PPInet. Remote Sens. 2021, 13, 3856. https://doi.org/10.3390/rs13193856
Chen X, Guan J, Mu X, Wang Z, Liu N, Wang G. Multi-Dimensional Automatic Detection of Scanning Radar Images of Marine Targets Based on Radar PPInet. Remote Sensing. 2021; 13(19):3856. https://doi.org/10.3390/rs13193856
Chicago/Turabian StyleChen, Xiaolong, Jian Guan, Xiaoqian Mu, Zhigao Wang, Ningbo Liu, and Guoqing Wang. 2021. "Multi-Dimensional Automatic Detection of Scanning Radar Images of Marine Targets Based on Radar PPInet" Remote Sensing 13, no. 19: 3856. https://doi.org/10.3390/rs13193856
APA StyleChen, X., Guan, J., Mu, X., Wang, Z., Liu, N., & Wang, G. (2021). Multi-Dimensional Automatic Detection of Scanning Radar Images of Marine Targets Based on Radar PPInet. Remote Sensing, 13(19), 3856. https://doi.org/10.3390/rs13193856