
Detecting Moving Target on Ground Based on Its Shadow by Using VideoSAR


Abstract
:
1. Introduction
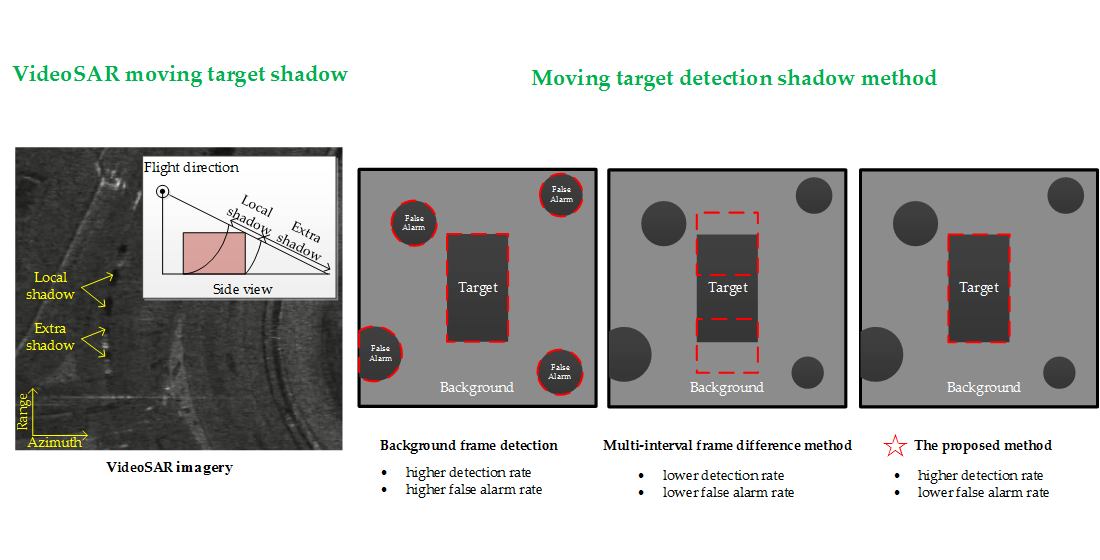
2. Principles and Deficiencies of Difference-Based Algorithms
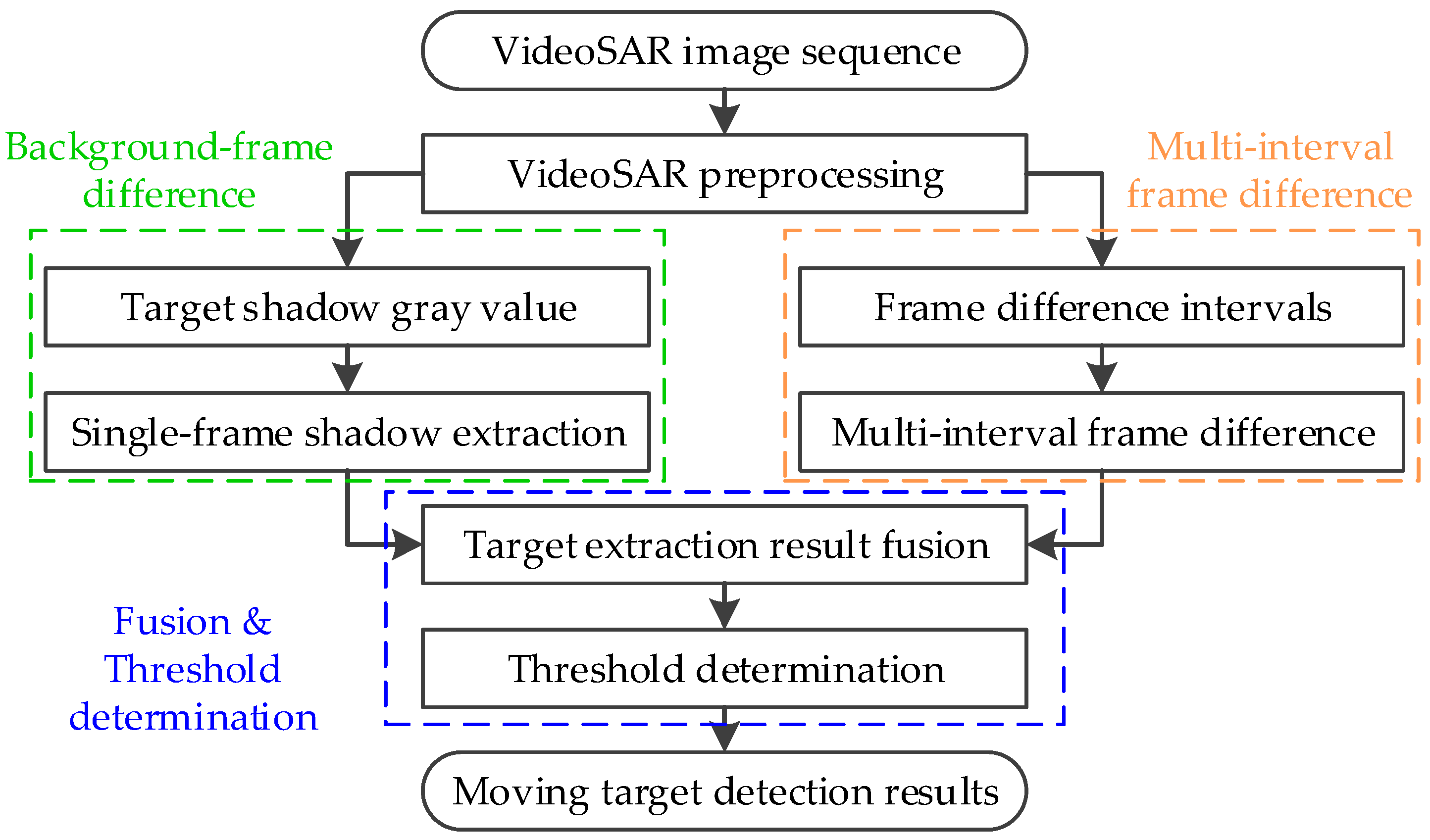
3. Fusing Background Frame Detection and Multi-Interval Frame Difference for MTD
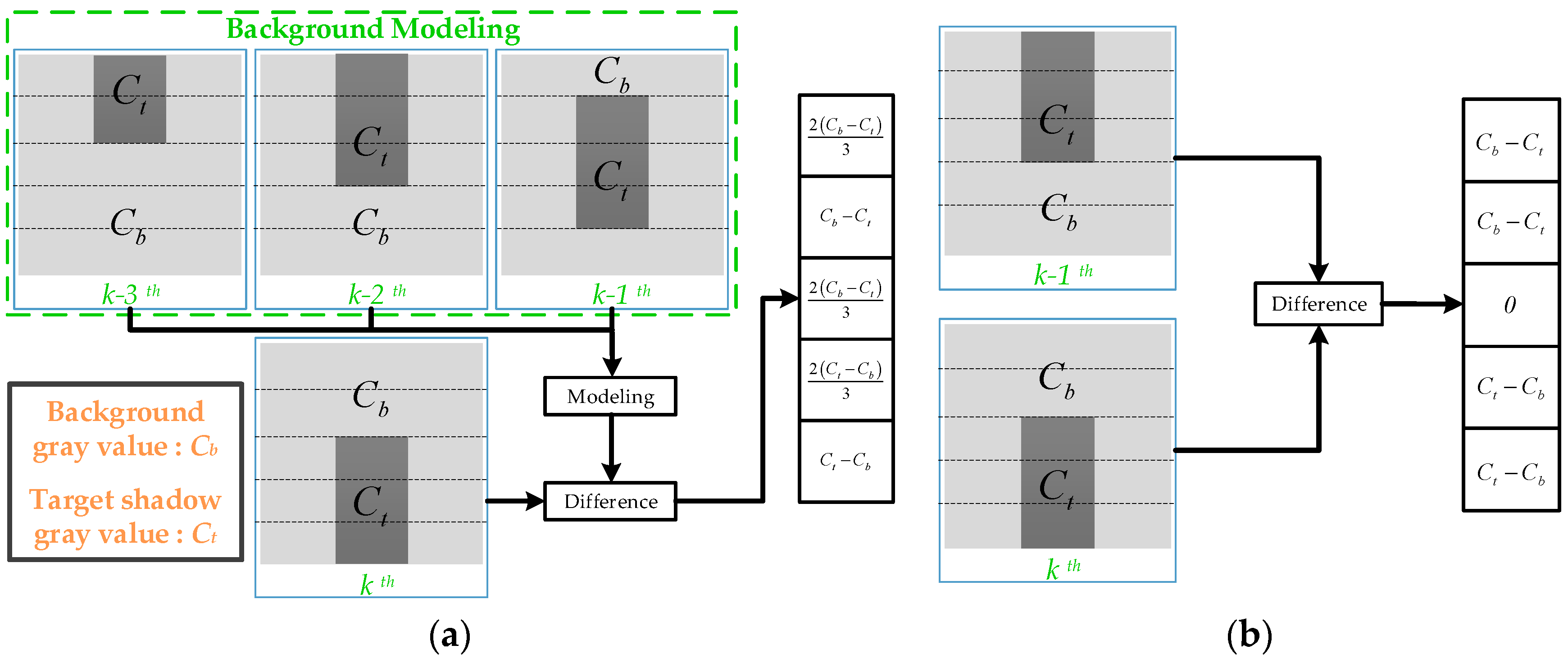
3.1. Background Frame Detection
3.2. Multi-Interval Frame Difference
3.3. Fusion and Threshold Determination
4. Experimental Results and Discussion
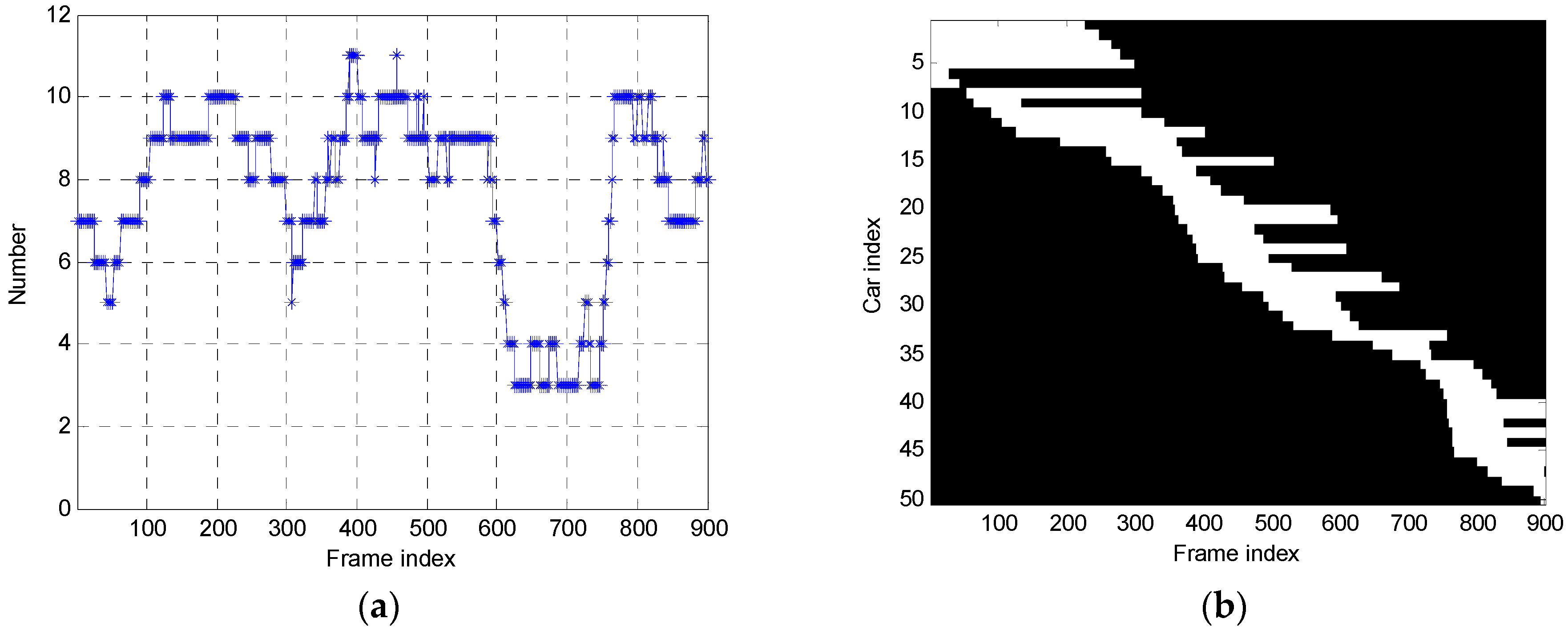
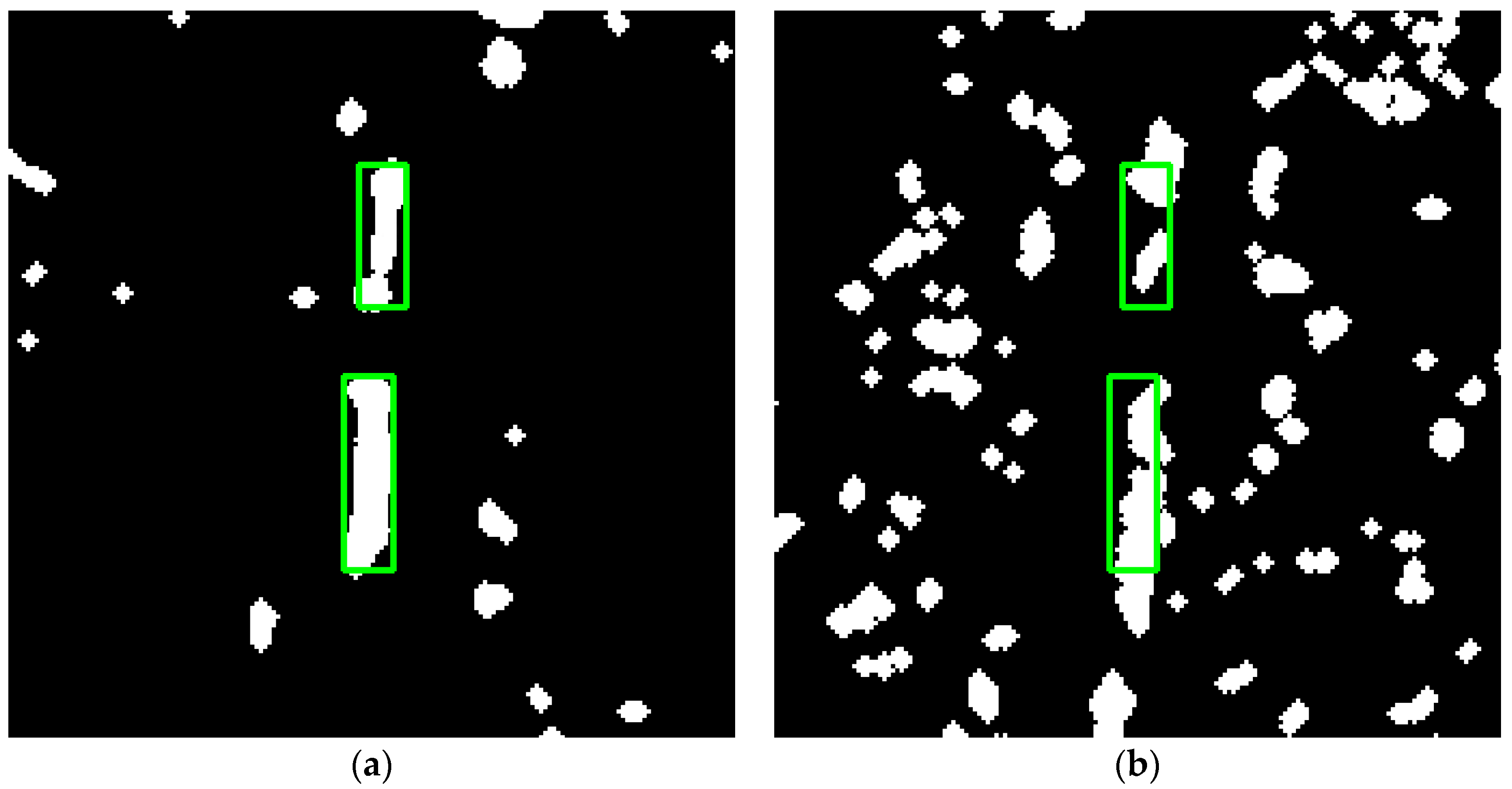
4.1. Results of Shadow Marking
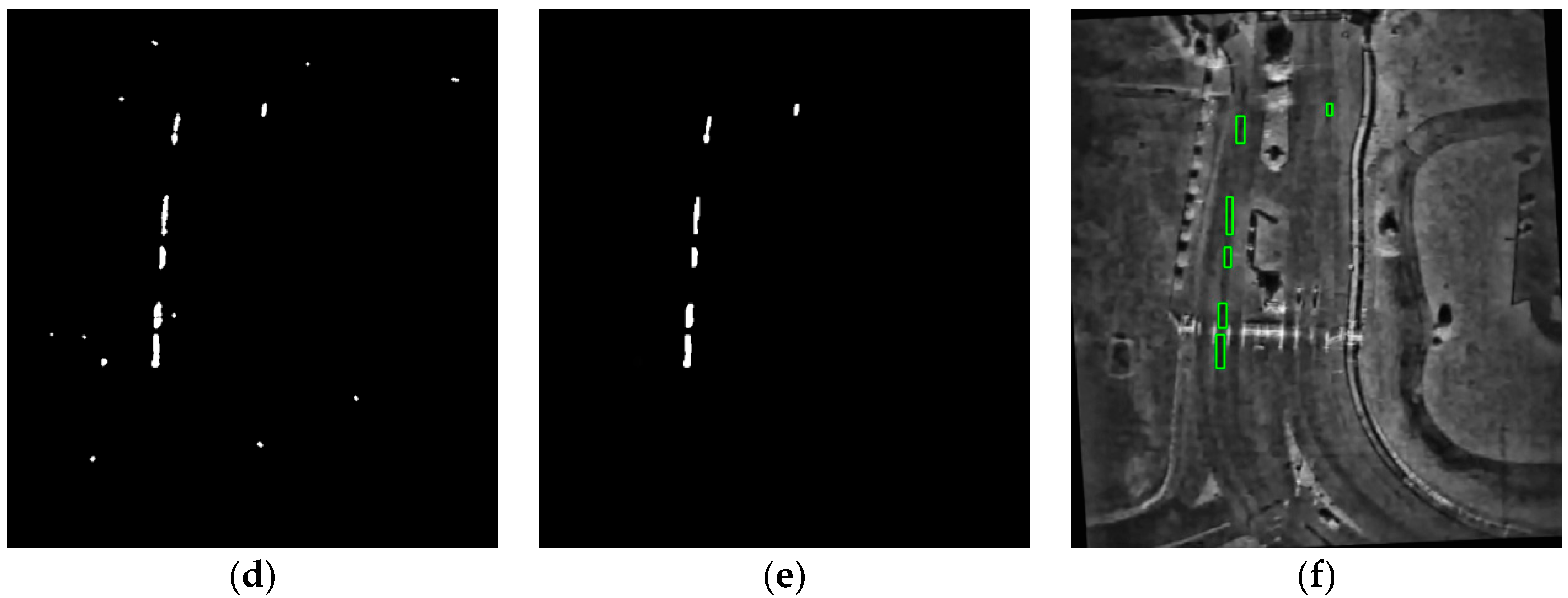
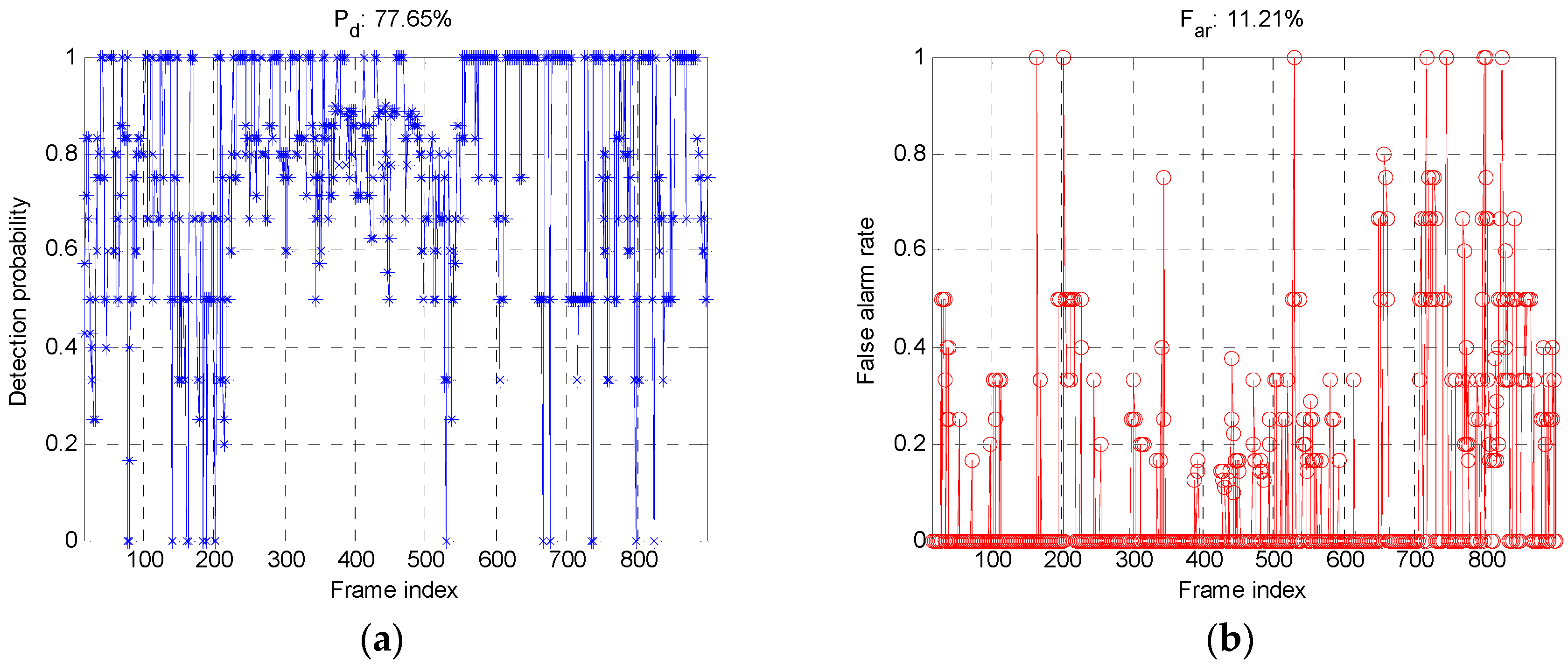
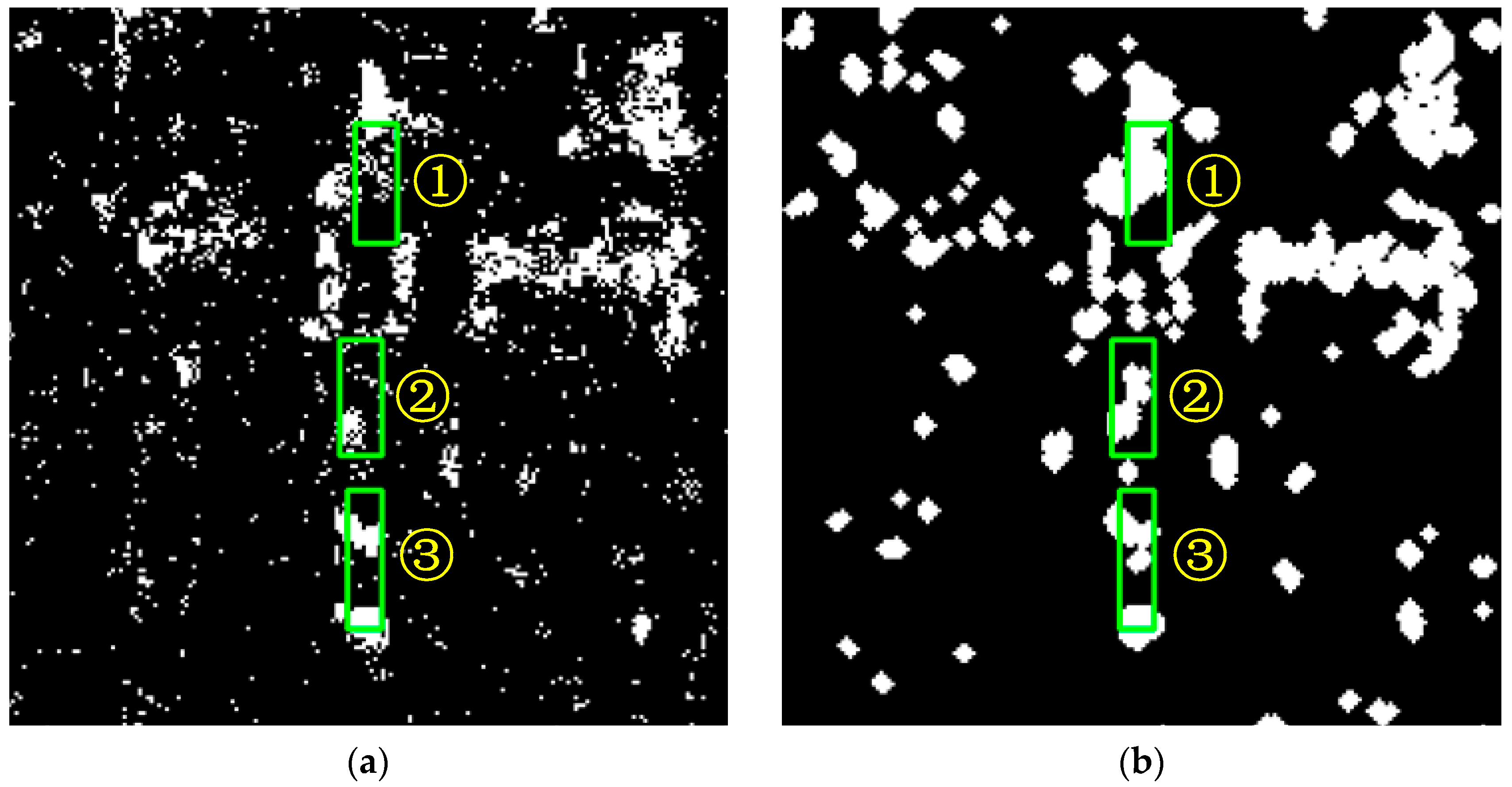
4.2. Results of Shadow Detection
4.3. Comparison and Discussion
4.4. Algorithm Time Complexity Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xiang, D.; Wang, W.; Tang, T.; Su, Y. Multiple-component polarimetric decomposition with new volume scattering models for PolSAR urban areas. IET Radar Sonar Navig. 2017, 11, 410–419. [Google Scholar] [CrossRef]
- Wang, W.; An, D.; Luo, Y.; Zhou, Z. The Fundamental Trajectory Reconstruction Results of Ground Moving Target from Single-Channel CSAR Geometry. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1–11. [Google Scholar] [CrossRef]
- Dudczyk, J.; Kawalec, A. Optimizing the minimum cost flow algorithm for the phase unwrapping process in SAR radar. Bull. Pol. Acad. Sci. Tech. Sci. 2014, 62, 511–516. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.; Tang, S.; Zhang, L.; Guo, P. Focusing High-Resolution Airborne SAR with Topography Variations Using an Extended BPA Based on a Time/Frequency Rotation Principle. Remote Sens. 2018, 10, 1275. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.-W.; Won, J.-S. Acceleration Compensation for Estimation of Along-Track Velocity of Ground Moving Target from Single-Channel SAR SLC Data. Remote Sens. 2020, 12, 1609. [Google Scholar] [CrossRef]
- Tanveer, H.; Balz, T.; Cigna, F.; Tapete, D. Monitoring 2011–2020 traffic patterns in Wuhan (China) with COSMO-SkyMed SAR, amidst the 7th CISM military world games and COVID-19 outbreak. Remote Sens. 2020, 12, 1636. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Sikaneta, I. A Generalization of DPCA Processing for Multichannel SAR/GMTI Radars. IEEE Trans. Geosci. Remote Sens. 2013, 51, 560–572. [Google Scholar] [CrossRef]
- Budillon, A.; Schirinzi, G. Performance evaluation of a GLRT moving target detector for TerraSAR-X along-track interferometric data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3350–3360. [Google Scholar] [CrossRef]
- Ender, J.H.G.; Gierull, C.H.; Cerutti-Maori, D. Improved Space-Based Moving Target Indication via Alternate Transmission and Receiver Switching. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3960–3974. [Google Scholar] [CrossRef]
- Harmony, D.W.; Bickel, D.L.; Martinez, A.; Martinez, A. A Velocity Independent Continuous Tracking Radar Concept; Sandia National Lab.: Monterey, CA, USA, 2011. [Google Scholar]
- He, Z.; Chen, X.; Yi, T.; He, F.; Dong, Z.; Zhang, Y. Moving Target Shadow Analysis and Detection for ViSAR Imagery. Remote Sens. 2021, 13, 3012. [Google Scholar] [CrossRef]
- Yang, X.; Shi, J.; Zhou, Y.; Wang, C.; Hu, Y.; Zhang, X.; Wei, S. Ground Moving Target Tracking and Refocusing Using Shadow in Video-SAR. Remote Sens. 2020, 12, 3083. [Google Scholar] [CrossRef]
- Tian, X.; Liu, J.; Mallick, M.; Huang, K. Simultaneous Detection and Tracking of Moving-Target Shadows in ViSAR Imagery. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1182–1199. [Google Scholar] [CrossRef]
- Zhao, B.; Han, Y.; Wang, H.; Tang, L.; Liu, X.; Wang, T. Robust Shadow Tracking for Video SAR. IEEE Geosci. Remote Sens. Lett. 2021, 18, 821–825. [Google Scholar] [CrossRef]
- Jahangir, M. Moving target detection for synthetic aperture radar via shadow detection. In Proceedings of the IET International Conference on Radar Systems 2007; Institution of Engineering and Technology: Edinburgh, UK, 2007; pp. 16–18. [Google Scholar]
- Zhang, Y.; Mao, X.; Yan, H.; Zhu, D.; Hu, X. A novel approach to moving targets shadow detection in VideoSAR imagery sequence. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS); Institute of Electrical and Electronics Engineers (IEEE): Fort Worth, TX, USA, 2017; pp. 606–609. [Google Scholar]
- Wang, H.; Chen, Z.; Zheng, S. Preliminary Research of Low-RCS Moving Target Detection Based on Ka-Band Video SAR. IEEE Geosci. Remote Sens. Lett. 2017, 14, 811–815. [Google Scholar] [CrossRef]
- Liu, Z.; An, D.; Huang, X. Moving Target Shadow Detection and Global Background Reconstruction for VideoSAR Based on Single-Frame Imagery. IEEE Access 2019, 7, 42418–42425. [Google Scholar] [CrossRef]
- Wen, L.; Ding, J.; Loffeld, O. Video SAR Moving Target Detection Using Dual Faster R-CNN. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2984–2994. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, F.; Tang, B.; Yin, Q.; Sun, X. Slim and Efficient Neural Network Design for Resource-Constrained SAR Target Recognition. Remote Sens. 2018, 10, 1618. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Yu, A.; Dong, Z.; He, Z.; Yi, T. Suppressing False Alarm in VideoSAR viaGradient-Weighted Edge Information. Remote Sens. 2019, 11, 2677. [Google Scholar] [CrossRef] [Green Version]
- Culibrk, D.; Marques, O.; Socek, D.; Kalva, H.; Furht, B. Neural Network Approach to Background Modeling for Video Object Segmentation. IEEE Trans. Neural Netw. 2007, 18, 1614–1627. [Google Scholar] [CrossRef]
- Yuan, Y.; Guojin, H.E.; Wang, G.; Jiang, W.; Kang, J. A background subtraction and frame subtraction combined method for moving vehicle detection in satellite video data. J. Univ. Chin. Acad. Sci. 2018, 35, 50–58. [Google Scholar]
- Li, Z.; Dong, Z.; Yu, A.; He, Z.; Zhu, X. A Robust Image Sequence Registration Algorithm for Videosar Combining Surf with Inter-Frame Processing. In Proceedings of the IGARSS 2019-2019 IEEE International Geoscience and Remote Sensing Symposium; Institute of Electrical and Electronics Engineers (IEEE), Yokohama, Japan, 28 July–2 August 2019; pp. 2794–2797. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indices | Frame Number | Background Frame Detection Algorithm | Multi-Interval Frame Difference Algorithm | Proposed Algorithm |
|---|---|---|---|---|
| Detection rate | 50 | 100% | 3/5 60% | 4/5 80% |
| 150 | 100% | 100% | 100% | |
| 250 | 100% | 2/6 33.3% | 100% | |
| 350 | 6/7 85.7% | 3/7 42.9% | 5/7 71.4% | |
| 450 | 100% | 2/5 40% | 4/5 80% | |
| 550 | 100% | 1/5 20% | 100% | |
| 650 | 100% | 2/5 40% | 100% | |
| 750 | 100% | 2/5 40% | 100% | |
| 850 | 100% | 1/4 25% | 3/4 75% | |
| False alarm rate | 50 | 25/30 83.3% | 2/5 40% | 0 |
| 150 | 14/18 77.8% | 0 | 0 | |
| 250 | 26/32 81.3% | 0 | 1/7 14.3% | |
| 350 | 30/38 78.9% | 0 | 1/7 14.3% | |
| 450 | 19/24 79.2% | 0 | 1/5 20% | |
| 550 | 16/21 76.2% | 1/2 50% | 0 | |
| 650 | 14/19 73.7% | 0 | 0 | |
| 750 | 24/29 82.8% | 0 | 0 | |
| 850 | 16/20 80% | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Z.; Li, Z.; Chen, X.; Yu, A.; Yi, T.; Dong, Z. Detecting Moving Target on Ground Based on Its Shadow by Using VideoSAR. Remote Sens. 2021, 13, 3291. https://doi.org/10.3390/rs13163291
He Z, Li Z, Chen X, Yu A, Yi T, Dong Z. Detecting Moving Target on Ground Based on Its Shadow by Using VideoSAR. Remote Sensing. 2021; 13(16):3291. https://doi.org/10.3390/rs13163291
Chicago/Turabian StyleHe, Zhihua, Zihan Li, Xing Chen, Anxi Yu, Tianzhu Yi, and Zhen Dong. 2021. "Detecting Moving Target on Ground Based on Its Shadow by Using VideoSAR" Remote Sensing 13, no. 16: 3291. https://doi.org/10.3390/rs13163291
APA StyleHe, Z., Li, Z., Chen, X., Yu, A., Yi, T., & Dong, Z. (2021). Detecting Moving Target on Ground Based on Its Shadow by Using VideoSAR. Remote Sensing, 13(16), 3291. https://doi.org/10.3390/rs13163291