Fish-Inspired Task Allocation Algorithm for Multiple Unmanned Aerial Vehicles in Search and Rescue Missions


Abstract
1. Introduction
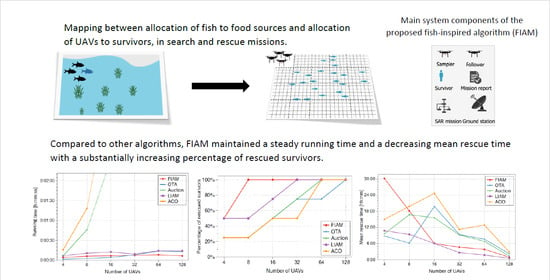
- A new algorithm inspired by fish schooling and foraging behavior, to address the special challenges of the task allocation problem, which is among the NP-hard problems.
- The customization of the proposed algorithm to address the extra challenging constraints of multi-UAV SAR missions.
- A strictly controlled experimental framework to thoroughly investigate the performance of the proposed algorithm at different problem scales.
2. Related Work
3. FIAM Algorithm
3.1. Biological Inspiration
3.2. System Overview
3.3. Sampler UAV Algorithm
3.4. Follower UAV Algorithm
4. Evaluation Methodology
- The number of UAVs was logarithmically increased in a power of 2 to include the teams of 4, 8, 16, 32, 64, and 128 UAVs.
- The number of survivors was similarly logarithmically increased to a power of 2 to include 2, 4, 8, 16, 32, 64, 128, 256, 512, 1024, 2048, and 4096 survivors.
5. Results and Discussion
5.1. Percentage of Rescued Survivors
5.2. Mean Rescue Time
5.3. Running Time Performance
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Pietsch, M.; Henning, M.; Mader, D.W.; Westfeld, P.; Etterer, F. Using unmanned aerial vehicles (UAV) for monitoring biodiversity measures in periurban and agrarian landscapes. J. Digit. Landsc. Archit. 2018, 3, 273–282. [Google Scholar]
- Kurdi, H.; AlDaood, M.F.; Al-Megren, S.; Aloboud, E.; Aldawood, A.S.; Youcef-Toumi, K. Adaptive task allocation for multi-UAV systems based on bacteria foraging behaviour. Appl. Soft Comput. 2019, 83, 105643. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-enabled intelligent transportation systems for the smart city: Applications and challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Lee, H.I.; Yoo, D.W.; Lee, B.Y.; Moon, G.H.; Lee, D.Y.; Tahk, M.J.; Shin, H.S. Parameter-robust linear quadratic Gaussian technique for multi-agent slung load transportation. Aerosp. Sci. Technol. 2017, 71, 119–127. [Google Scholar] [CrossRef]
- Di Mauro, B.; Fava, F.; Ferrero, L.; Garzonio, R.; Baccolo, G.; Delmonte, B.; Colombo, R. Mineral dust impact on snow radiative properties in the European Alps combining ground, UAV and satellite observations. J. Geophys. Res. Atmos. 2015, 120. [Google Scholar] [CrossRef]
- Malehmir, A.; Dynesius, L.; Paulusson, K.; Paulusson, A.; Johansson, H.; Bastani, M.; Wedmark, M.; Marsden, P. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: A case study from central Sweden. Lead. Edge 2017, 36, 552–557. [Google Scholar] [CrossRef]
- Walter, C.; Braun, A.; Fotopoulos, G. High-resolution unmanned aerial vehicle aeromagnetic surveys for mineral exploration targets. Geophys. Prospect. 2020, 68, 334–349. [Google Scholar] [CrossRef]
- Kurdi, H.; How, J.; Bautista, G. Bio-Inspired Algorithm for Task Allocation in Multi-UAV Search and Rescue Missions. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Sampedro, C.; Rodriguez-Ramos, A.; Bavle, H.; Carrio, A.; de la Puente, P.; Campoy, P. A fully-autonomous aerial robot for search and rescue applications in indoor environments using learning-based techniques. J. Intell. Robot. Syst. 2019, 95, 601–627. [Google Scholar] [CrossRef]
- Yu, X.; Li, C.; Zhou, J. A constrained differential evolution algorithm to solve UAV path planning in disaster scenarios. Knowl. Based Syst. 2020, 204, 106209. [Google Scholar] [CrossRef]
- Waharte, S.; Trigoni, N. Supporting Search and Rescue Operations with UAVs. In Proceedings of the 2010 International Conference on Emerging Security Technologies, Canterbury, UK, 6–7 September 2010. [Google Scholar]
- Berger, J.; Lo, N. An innovative multi-agent search-and-rescue path planning approach. Comput. Oper. Res. 2015, 53, 24–31. [Google Scholar] [CrossRef]
- Qi, J.; Song, D.; Shang, H.; Wang, N.; Hua, C.; Wu, C.; Qi, X.; Han, J. Search and rescue rotary-wing UAV and its application to the lushan ms 7.0 earthquake. J. Field Robot. 2016, 33, 290–321. [Google Scholar] [CrossRef]
- Zhao, W.; Meng, Q.; Chung, P.W.H. A heuristic distributed task allocation method for multivehicle multitask problems and its application to search and rescue scenario. IEEE Trans. Cybern. 2016, 46, 902–915. [Google Scholar] [CrossRef] [PubMed]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomat. Nat. Hazards Risk 2017, 8, 18–33. [Google Scholar] [CrossRef]
- Matos, A.; Silva, E.; Almeida, J.; Martins, A.; Ferreira, H.; Ferreira, B.; Alves, J.; Dias, A.; Fioravanti, S.; Bertin, D.; et al. Unmanned maritime systems for search and rescue. In Search and Rescue Robotics—From Theory to Practice; Cubber, G.D., Doroftei, D., Rudin, K., Berns, K., Serrano, D., Sanchez, J., Govindaraj, S., Bedkowski, J., Roda, R., Eds.; InTech: London, UK, 2017; pp. 77–92. [Google Scholar]
- Kurdi, H.A.; Aloboud, E.; Alalwan, M.; Alhassan, S.; Alotaibi, E.; Bautista, G.; How, J.P. Autonomous task allocation for multi-UAV systems based on the locust elastic behavior. Appl. Soft Comput. 2018, 71, 110–126. [Google Scholar] [CrossRef]
- Goian, A.; Ashour, R.; Ahmad, U.; Taha, T.; Almoosa, N.; Seneviratne, L. Victim localization in USAR scenario exploiting multi-layer mapping structure. Remote Sens. 2019, 11, 2704. [Google Scholar] [CrossRef]
- Casper, J.; Murphy, R.R. Human-robot interactions during the robot-assisted urban search and rescue response at the World Trade Center. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2003, 33, 367–385. [Google Scholar] [CrossRef]
- Murphy, R.R. Disaster Robotics; The MIT Press: Cambridge, UK, 2014. [Google Scholar]
- Yan, Z.; Jouandeau, N.; Cherif, A.A. A survey and analysis of multi-robot coordination. Int. J. Adv. Robot. Syst. 2013, 10. [Google Scholar] [CrossRef]
- Bekmezci, İ.; Sahingoz, O.K.; Temel, Ş. Flying ad-hoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Korsah, G.A.; Stentz, A.; Dias, M.B. A comprehensive taxonomy for multi-robot task allocation. Int. J. Robot. Res. 2013, 32, 1495–1512. [Google Scholar] [CrossRef]
- Brown, C.; Laland, K.; Krause, J. Fish Cognition and Behavior; Wiley-Blackwel: Oxford, UK, 2008. [Google Scholar]
- Segui-Gasco, P.; Shin, H.; Tsourdos, A.; Seguí, V.J. A Combinatorial Auction Framework for Decentralised Task Allocation. In Proceedings of the 2014 IEEE Globecom Workshops (GC Wkshps), Austin, TX, USA, 8–12 December 2014. [Google Scholar]
- Wang, L.; Wang, Z.; Hu, S.; Liu, L. Ant colony optimization for task allocation in multi-agent systems. China Commun. 2013, 10, 125–132. [Google Scholar] [CrossRef]
- Macarthur, K. Multi-Agent Coordination for Dynamic Decentralised Task Allocation. Doctoral Thesis, University of Southampton, Southampton, UK, 2011. [Google Scholar]
- Bertsekas, D.P. The auction algorithm: A distributed relaxation method for the assignment problem. Ann. Oper. Res. 1988, 14, 105–123. [Google Scholar] [CrossRef]
- Johnson, L.; Choi, H.L.; How, J.P. The hybrid information and plan consensus algorithm with imperfect situational awareness. In Distributed Autonomous Robotic Systems; Chong, N.Y., Cho, Y.J., Eds.; Springer: Tokyo, Japan, 2016; pp. 221–233. [Google Scholar]
- Ma, Y.; Li, B.; Zhang, Y.; Zhu, J. Efficient Auction Mechanism with Group Price for Resource Allocation in Clouds. In Proceedings of the 2014 Second International Conference on Advanced Cloud and Big Data, Huangshan, China, 20–22 November 2014; pp. 85–92. [Google Scholar]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]
- Greenfield, G.; Machado, P. Ant- and ant-colony-inspired ALife visual art. Artif. Life 2015, 21, 293–306. [Google Scholar] [CrossRef]
- Shirkande, S.D.; Vatti, R.A. ACO Based Routing Algorithms for Ad-Hoc Network (WSN, MANETs): A Survey. In Proceedings of the 2013 International Conference on Communication Systems and Network Technologies, Gwalior, India, 6–8 April 2013; pp. 230–235. [Google Scholar]
- Duan, H.; Yu, Y.; Zou, J.; Feng, X. Ant colony optimization-based bio-inspired hardware: Survey and prospect. Trans. Inst. Meas. Control 2010, 34, 318–333. [Google Scholar] [CrossRef]
- Taixiong, Z.; Liangyi, Y. Optimal Ant Colony Algorithm Based Multi-Robot Task Allocation and Processing Sequence Scheduling. In Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 5693–5698. [Google Scholar]
- Wu, H.; Li, H.; Xiao, R.; Liu, J. Modeling and simulation of dynamic ant colony’s labor division for task allocation of UAV swarm. Phys. A Stat. Mech. Appl. 2018, 491, 127–141. [Google Scholar] [CrossRef]
- Boussaïd, I.; Lepagnot, J.; Siarry, P. A survey on optimization metaheuristics. Inf. Sci. 2013, 237, 82–117. [Google Scholar] [CrossRef]
- Sudholt, D.; Thyssen, C. Running time analysis of ant colony optimization for shortest path problems. J. Discrete Algorithms 2012, 10, 165–180. [Google Scholar] [CrossRef]
- Neshat, M.; Sepidnam, G.; Sargolzaei, M.; Toosi, A.N. Artificial fish swarm algorithm: A survey of the state-of-the-art, hybridization, combinatorial and indicative applications. Artif. Intell. Rev. 2014, 42, 965–997. [Google Scholar] [CrossRef]
- Faheem, M.; Gungor, V.C. Capacity and spectrum-aware communication framework for wireless sensor network-based smart grid applications. Comput. Stand. Interfaces 2017, 53, 48–58. [Google Scholar] [CrossRef]
- He, M.; Liu, F.; Miao, Z.; Zhou, H.; Chen, Q. A mechanism of topology optimization for underwater acoustic sensor networks based on autonomous underwater vehicles. Int. J. Distrib. Sens. Netw. 2017, 13, 155014771668697. [Google Scholar] [CrossRef]
- Zhang, K.; Jia, H.; Lv, H. Coverage-enhancing approach in multimedia directional sensor networks for smart transportation. Multimed. Tools Appl. 2016, 75, 17593–17615. [Google Scholar] [CrossRef]
- El-said, S.A.; Osamaa, A.; Hassanien, A.E. Optimized hierarchical routing technique for wireless sensors networks. Soft Comput. 2016, 20, 4549–4564. [Google Scholar] [CrossRef]
- Xia, J. Coverage Optimization Strategy of Wireless Sensor Network Based on Swarm Intelligence Algorithm. In Proceedings of the 2016 International Conference on Smart City and Systems Engineering (ICSCSE), Zhangjiajie, China, 25–26 November 2016; pp. 179–182. [Google Scholar]
- Zhang, F.S.; Li, S.W.; Hu, Z.G.; Du, Z. Fish swarm window selection algorithm based on cell microscopic automatic focus. Clust. Comput. 2017, 20, 485–495. [Google Scholar] [CrossRef]
- Qin, L.; Sun, K.; Li, S. Maximum Fuzzy Entropy Image Segmentation Based on Artificial Fish School Algorithm. In Proceedings of the 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 27–28 August 2016; pp. 164–168. [Google Scholar]
- Ferreira, F.A.B.S.; Madeiro, F. A Fish School Search Based Algorithm for Image Channel-Optimized Vector Quantization. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 1680–1685. [Google Scholar]
- Dong, D.; Chen, W.; Hou, Z. Hydrodynamic Performance and Flow Control of Two Flexible Bodies in Fish Schooling-Like Configuration. In Proceedings of the 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 24–26 April 2017; pp. 491–494. [Google Scholar]
- Mao, J.; Xiao, G.; Sheng, W.; Qu, Z.; Liu, Y. Research on realizing the 3D occlusion tracking location method of fish’s school target. Neurocomputing 2016, 214, 61–79. [Google Scholar] [CrossRef]
- Zhang, F.; Ennasr, O.; Litchman, E.; Tan, X. Autonomous sampling of water columns using gliding robotic fish: Algorithms and harmful-algae-sampling experiments. IEEE Syst. J. 2016, 10, 1271–1281. [Google Scholar] [CrossRef]
- Huang, Z.; Chen, Y.; Shi, X. A synergetic semantic role labeling model with the introduction of fluctuating force accompanied with word sense information. Intell. Data Anal. 2017, 21, 5–18. [Google Scholar] [CrossRef]
- Carneiro, R.F.; Bastos-Filho, C.J.A. Improving the Binary Fish School Search Algorithm for Feature Selection. In Proceedings of the 2016 IEEE Latin American Conference on Computational Intelligence (LA-CCI), Cartagena, Colombia, 2–4 November 2016; pp. 1–6. [Google Scholar]
- He, S.; Belacel, N.; Chan, A.; Hamam, H.; Bouslimani, Y. A hybrid artificial fish swarm simulated annealing optimization algorithm for automatic identification of clusters. Int. J. Inf. Technol. Decis. Mak. 2016, 15, 949–974. [Google Scholar] [CrossRef]
- Shen, H.; Chen, J.; Li, H.; Zhou, Z. Research on Real-Rime Flight Path Planning of UAV Based on Grey Prediction. In Proceedings of the 9th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 10–11 December 2016; pp. 62–67. [Google Scholar]
- Ma, X.; Tang, R.; Kang, J.; Liu, Q. Optimizing Application Layer Multicast Routing via Artificial Fish Swarm Algorithm. In Proceedings of the 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Changsha, China, 13–15 August 2016; pp. 115–120. [Google Scholar]
- de Albuquerque, I.M.C.; Filho, J.M.; de Lima Neto, F.B.; de Oliveira Silva, A.M. Solving Assembly Line Balancing Problems with Fish School Search Algorithm. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016; pp. 1–8. [Google Scholar]
- Sun, X.; Fang, H. Speed Governor PID Gains Optimal Tuning of Hydraulic Turbine Generator Set with an Improved Artificial Fish Swarm Algorithm. In Proceedings of the 2016 IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016; pp. 2033–2035. [Google Scholar]
- Li, X.; Shao, Z.; Qian, J. An optimizing method based on autonomous animate: Fish swarm algorithm. Syst. Eng. Theory Pract. 2002, 22, 32–38. [Google Scholar]
- Tian, W.; Liu, J. An Improved Artificial Fish Swarm Algorithm for Multi Robot Task Scheduling. In Proceedings of the Fifth International Conference on Natural Computation, Tianjin, China, 14–16 August 2009; pp. 127–130. [Google Scholar]
- Zheng, T.; Li, J. Multi-Robot Task Allocation and Scheduling Based on Fish Swarm Algorithm. In Proceedings of the 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 6681–6685. [Google Scholar]
- Bshary, R.; Gingins, S.; Vail, A.L. Social cognition in fishes. Trends Cogn. Sci. 2014, 18, 465–471. [Google Scholar] [CrossRef]
- Brownscombe, J.W.; Cooke, S.J.; Algera, D.A.; Hanson, K.C.; Eliason, E.J.; Burnett, N.J.; Danylchuk, A.J.; Hinch, S.G.; Farrell, A.P. Ecology of exercise in wild fish: Integrating concepts of individual physiological capacity, behavior, and fitness through diverse case studies. Integr. Comp. Biol. 2017, 57, 281–292. [Google Scholar] [CrossRef]
- Filho, C.J.A.B.; Neto, F.B.D.L.; Lins, A.J.C.C.; Nascimento, A.I.S.; Lima, M.P. A Novel Search Algorithm Based on Fish School Behavior. In Proceedings of the 2008 IEEE International Conference on Systems, Man and Cybernetics, Singapore, 12–15 October 2008; pp. 2646–2651. [Google Scholar]
- Reynolds, C.W. Flocks, Herds and Schools: A Distributed Behavioral Model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 27–31 July 1987; pp. 25–34. [Google Scholar]
- Lönnstedt, O.M.; Ferrari, M.C.; Chivers, D.P. Lionfish predators use flared fin displays to initiate cooperative hunting. Biol. Lett. 2014, 10, 20140281. [Google Scholar] [CrossRef] [PubMed]
- Pitcher, T.J.; Magurran, A.E.; Winfield, I.J. Fish in larger shoals find food faster. Behav. Ecol. Sociobiol. 1982, 10, 149–151. [Google Scholar] [CrossRef]
- Ward, A.J.W.; Krause, J.; Sumpter, D.J.T. Quorum decision-making in foraging fish shoals. PLoS ONE 2012, 7, e32411. [Google Scholar] [CrossRef] [PubMed]
- Kurdi, H.; Al-Megren, S.; Aloboud, E.; Alnuaim, A.A.; Alomair, H.; Alothman, R.; Muhayya, A.B.; Alharbi, N.; Alenzi, M.; Youcef-Toumi, K. Bee-inspired task allocation algorithm for multi-UAV search and rescue missions. Int. J. Bio Inspired Comput. 2020, 111. [Google Scholar] [CrossRef]
- Pujol-Gonzalez, M.; Cerquides, J.; Meseguer, P. MAS-Planes: A Multi-Agent Simulation Environment to Investigate Decentralised Coordination for Teams of UAVs. In Proceedings of the 13th International Conference on Autonomous Agents and Multi-Agent Systems (AAMAS 2014), Paris, France, 5–9 May 2014; pp. 1695–1696. [Google Scholar]
- Aloboud, E. GitHub—xEbtesam/MASPlanes: MASPlanes Simulator for the Development of Distributed Coordination Algorithms, MASPlanes. 10 December 2016. Available online: https://github.com/xEbtesam/MASPlanes (accessed on 7 September 2020).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Settings |
|---|---|
| Disaster area size | 111 × 111 regions, 9 blocks per region |
| Block size | 3 m × 3 m |
| Hotspots | 10; radius: 200 m |
| Critical survival window | 10–72 h |
| Plane maximum speed | 40 miles/hour |
| Battery capacity | 9000 units (15 min of travel) |
| Battery recharge ratio | 30 units/second |
| Search power consumption penalty | 5 units of power |
| Search time penalty | 10 s |
| Rescue power consumption penalty | 10 units of power |
| Rescue time penalty | 60 s |
| Idle power consumption | 1 unit of power/300 milliseconds |
| Standard power consumption | 1 unit of power/100 milliseconds |
| Charging stations | 9 stations |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alhaqbani, A.; Kurdi, H.; Youcef-Toumi, K. Fish-Inspired Task Allocation Algorithm for Multiple Unmanned Aerial Vehicles in Search and Rescue Missions. Remote Sens. 2021, 13, 27. https://doi.org/10.3390/rs13010027
Alhaqbani A, Kurdi H, Youcef-Toumi K. Fish-Inspired Task Allocation Algorithm for Multiple Unmanned Aerial Vehicles in Search and Rescue Missions. Remote Sensing. 2021; 13(1):27. https://doi.org/10.3390/rs13010027
Chicago/Turabian StyleAlhaqbani, Amjaad, Heba Kurdi, and Kamal Youcef-Toumi. 2021. "Fish-Inspired Task Allocation Algorithm for Multiple Unmanned Aerial Vehicles in Search and Rescue Missions" Remote Sensing 13, no. 1: 27. https://doi.org/10.3390/rs13010027
APA StyleAlhaqbani, A., Kurdi, H., & Youcef-Toumi, K. (2021). Fish-Inspired Task Allocation Algorithm for Multiple Unmanned Aerial Vehicles in Search and Rescue Missions. Remote Sensing, 13(1), 27. https://doi.org/10.3390/rs13010027