A Textural Approach to Improving Snow Depth Estimates in the Weddell Sea


Abstract

1. Introduction
2. Data and Preprocessing
2.1. Snow Freeboard Data
2.2. Snow Radar Data
3. Methods
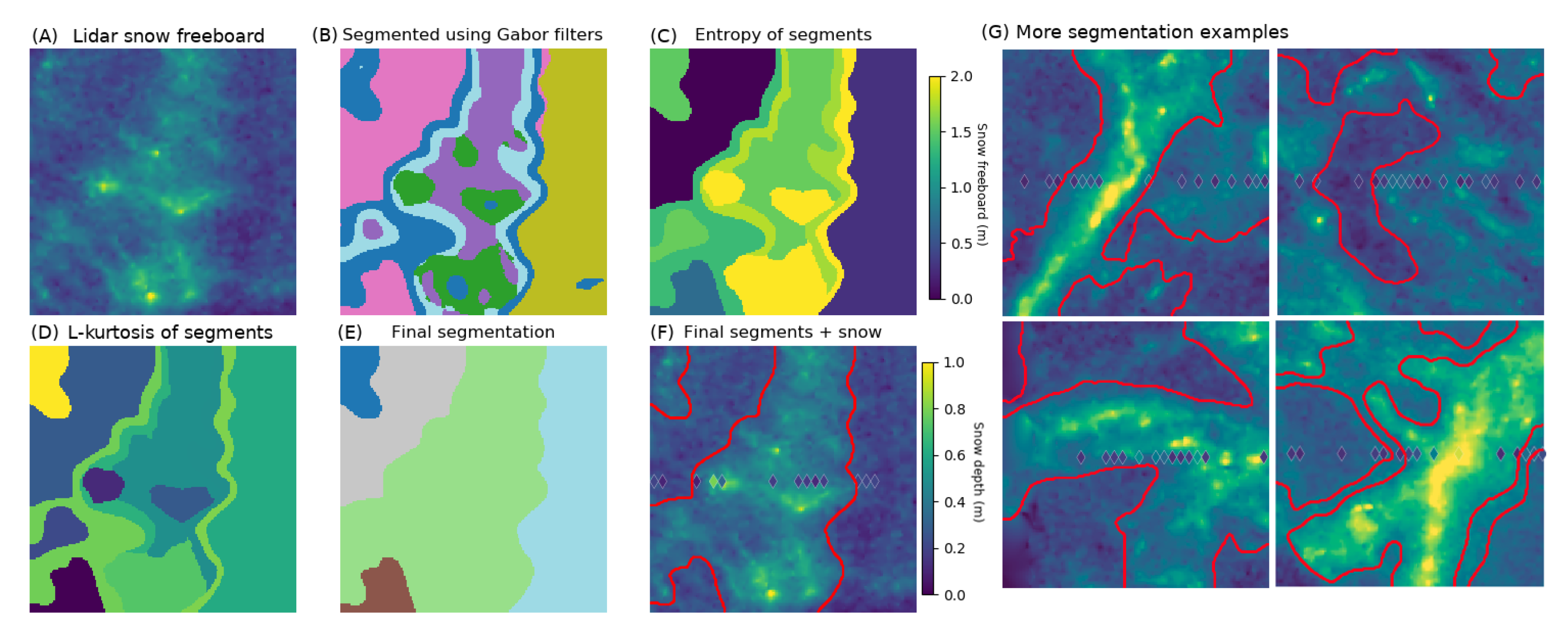
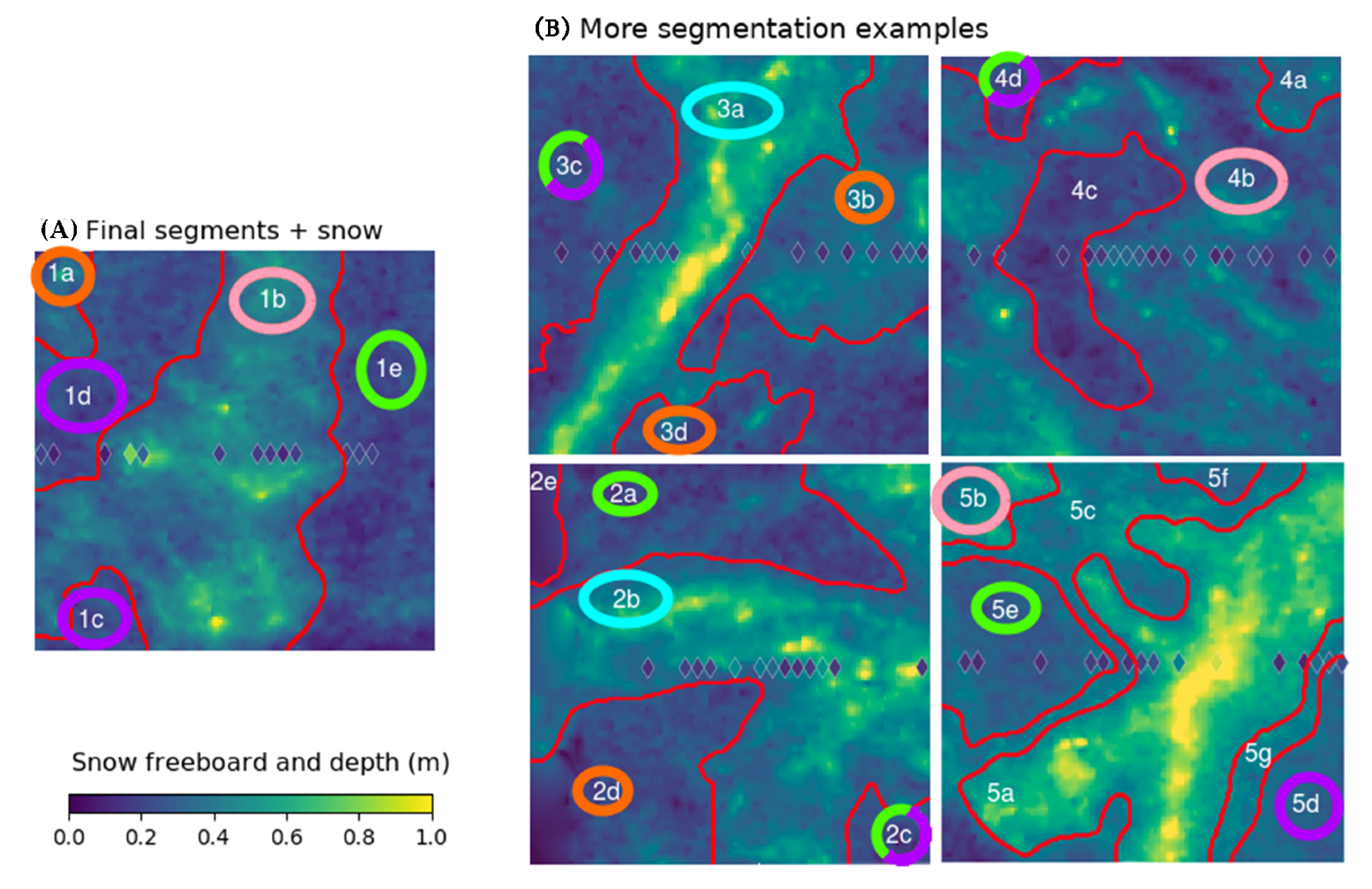
3.1. Textural Segmentation of Snow Surface
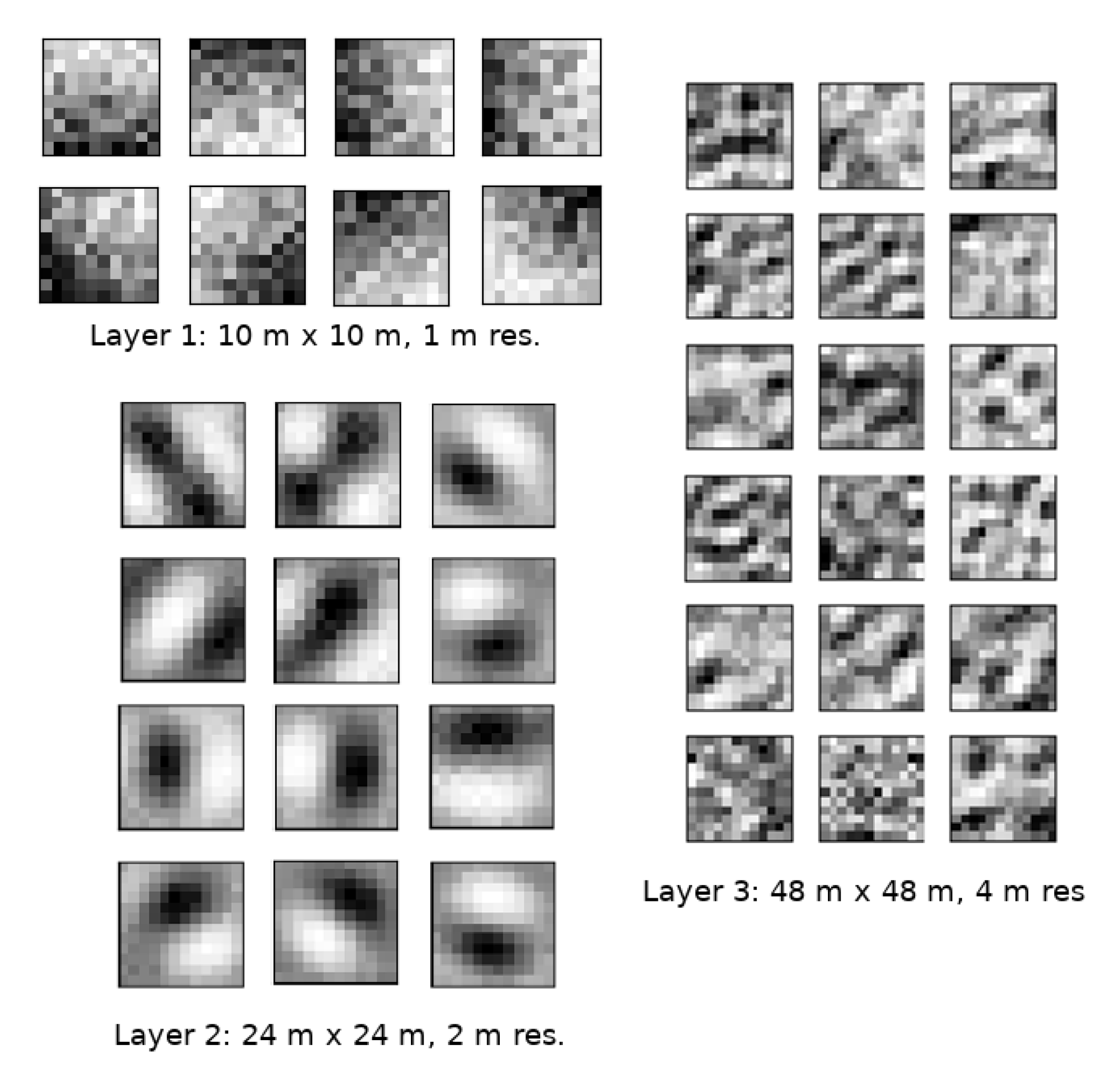
3.2. ConvNet for Learning Mean Snow Depth
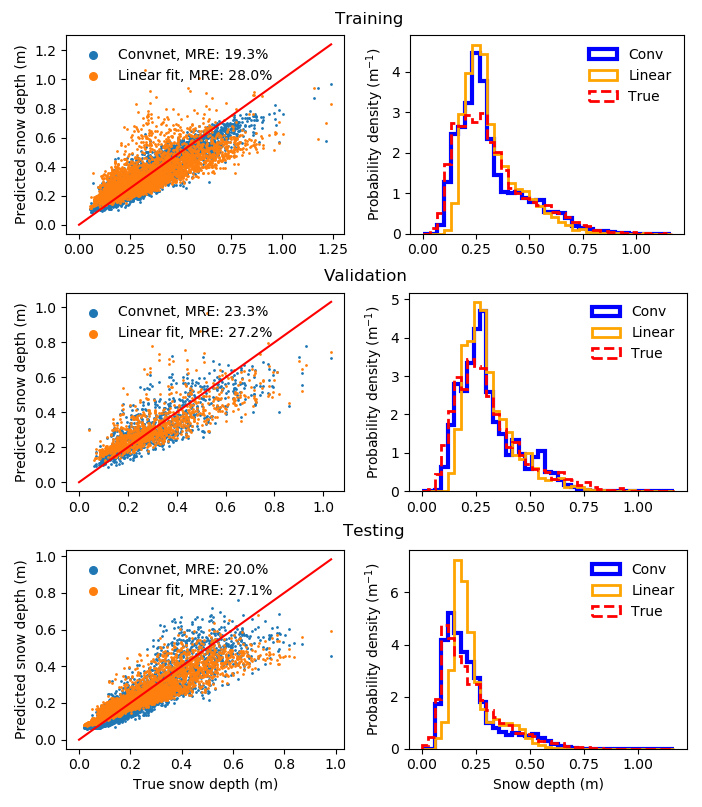
4. Results
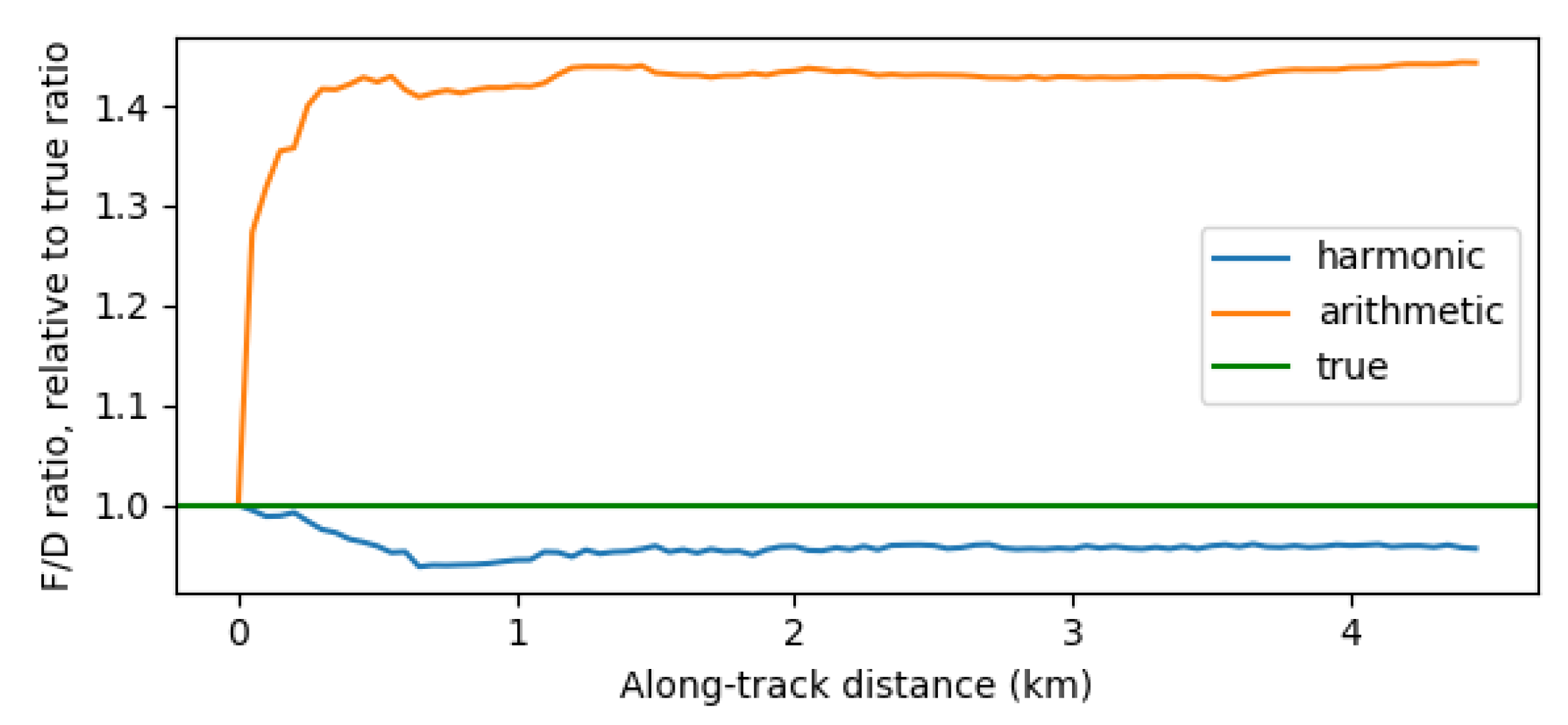
4.1. Extrapolated Snow Depths
4.2. ConvNet Results
5. Discussion
5.1. Effectiveness of Segment Texture-Matching
5.2. ConvNet Analysis
5.3. Implications for SIT Estimates
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Example of Segment Matching


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Area (m) | N | D (m) | F (m) | (m) | Entropy | L-Kurtosis | |
|---|---|---|---|---|---|---|---|---|
| 1a | 1143 | 0 | - | 0.6255 | 0.133 | 4.357 | 0.191 | - |
| 1b | 16,454 | 8 | 0.2546 | 0.805 | 0.209 | 4.506 | 0.133 | 3.72 |
| 1c | 1090 | 0 | - | 0.4833 | 0.074 | 4.016 | 0.092 | - |
| 1d | 5032 | 2 | 0.1500 | 0.491 | 0.074 | 3.732 | 0.121 | 3.34 |
| 1e | 8681 | 3 | 0.2033 | 0.434 | 0.096 | 3.841 | 0.152 | 2.29 |
| 2a | 6374 | 0 | - | 0.4277 | 0.113 | 4.150 | 0.111 | - |
| 2b | 18,009 | 13 | 0.2355 | 0.887 | 0.274 | 4.726 | 0.097 | 3.83 |
| 2c | 1001 | 0 | - | 0.4279 | 0.103 | 4.088 | 0.119 | - |
| 2d | 6276 | 0 | - | 0.4160 | 0.138 | 3.981 | 0.193 | - |
| 2e | 740 | 0 | - | 0.2313 | 0.071 | 3.799 | 0.027 | - |
| 3a | 16,027 | 5 | 0.2555 | 0.864 | 0.409 | 4.753 | 0.084 | 3.00 |
| 3b | 7698 | 7 | 0.1573 | 0.660 | 0.154 | 4.209 | 0.200 | 4.31 |
| 3c | 6451 | 3 | 0.1039 | 0.441 | 0.090 | 3.770 | 0.143 | 4.57 |
| 3d | 2224 | 0 | - | 0.4831 | 0.148 | 4.400 | 0.187 | - |
| 4a | 964 | 0 | - | 0.6883 | 0.105 | 4.117 | 0.147 | - |
| 4b | 25,523 | 16 | 0.1680 | 0.637 | 0.197 | 4.472 | 0.137 | 3.44 |
| 4c | 4784 | 1 | 0.1322 | 0.374 | 0.086 | 4.024 | 0.128 | 2.75 |
| 4d | 1129 | 0 | - | 0.4086 | 0.078 | 3.937 | 0.118 | - |
| 5a | 14,752 | 6 | 0.3305 | 1.313 | 0.291 | 4.944 | 0.123 | 4.43 |
| 5b | 1521 | 0 | - | 0.9537 | 0.203 | 4.678 | 0.139 | - |
| 5c | 7251 | 1 | 0.1305 | 0.779 | 0.160 | 4.431 | 0.246 | 5.27 |
| 5d | 2424 | 1 | 0.2169 | 0.636 | 0.076 | 3.608 | 0.097 | 3.16 |
| 5e | 4486 | 5 | 0.1281 | 0.607 | 0.093 | 3.819 | 0.079 | 5.12 |
| 5f | 548 | 0 | - | 0.6733 | 0.079 | 3.935 | 0.056 | - |
| 5g | 1418 | 2 | 0.3406 | 0.840 | 0.083 | 4.265 | 0.188 | 2.26 |
References
- Kurtz, N. IceBridge quick look sea ice freeboard, snow depth, and thickness product manual for 2013. NSIDC 2013. [Google Scholar] [CrossRef]
- Zwally, H.J.; Yi, D.; Kwok, R.; Zhao, Y. ICESat measurements of sea ice freeboard and estimates of sea ice thickness in the Weddell Sea. J. Geophys. Res. Ocean. 2008, 113. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Xie, H.; Tekeli, A.E.; Ackley, S.F.; Yi, D.; Zwally, H.J. Sea ice thickness estimations from ICESat Altimetry over the Bellingshausen and Amundsen Seas, 2003–2009. J. Geophys. Res. Ocean. 2013, 118, 2438–2453. [Google Scholar] [CrossRef]
- Mei, M.J.; Maksym, T.; Weissling, B.; Singh, H. Estimating early-winter Antarctic sea ice thickness from deformed ice morphology. Cryosphere 2019, 13, 2915–2934. [Google Scholar] [CrossRef]
- Ozsoy-Cicek, B.; Kern, S.; Ackley, S.F.; Xie, H.; Tekeli, A.E. Intercomparisons of Antarctic sea ice types from visual ship, RADARSAT-1 SAR, Envisat ASAR, QuikSCAT, and AMSR-E satellite observations in the Bellingshausen Sea. Deep Sea Res. Part II Top. Stud. Oceanogr. 2011, 58, 1092–1111. [Google Scholar] [CrossRef]
- Steer, A.; Heil, P.; Watson, C.; Massom, R.A.; Lieser, J.L.; Ozsoy-Cicek, B. Estimating small-scale snow depth and ice thickness from total freeboard for East Antarctic sea ice. Deep Sea Res. Part II Top. Stud. Oceanogr. 2016, 131, 41–52. [Google Scholar] [CrossRef]
- Kwok, R.; Kacimi, S. Three years of sea ice freeboard, snow depth, and ice thickness of the Weddell Sea from Operation IceBridge and CryoSat-2. Cryosphere 2018, 12, 2789–2801. [Google Scholar] [CrossRef]
- Kwok, R.; Maksym, T. Snow depth of the Weddell and Bellingshausen sea ice covers from IceBridge surveys in 2010 and 2011: An examination. J. Geophys. Res. Ocean. 2014, 119, 4141–4167. [Google Scholar] [CrossRef]
- Xie, H.; Ackley, S.; Yi, D.; Zwally, H.; Wagner, P.; Weissling, B.; Lewis, M.; Ye, K. Sea-ice thickness distribution of the Bellingshausen Sea from surface measurements and ICESat altimetry. Deep Sea Res. Part II Top. Stud. Oceanogr. 2011, 58, 1039–1051. [Google Scholar] [CrossRef]
- Markus, T.; Massom, R.; Worby, A.; Lytle, V.; Kurtz, N.; Maksym, T. Freeboard, snow depth and sea-ice roughness in East Antarctica from in situ and multiple satellite data. Ann. Glaciol. 2011, 52, 242–248. [Google Scholar] [CrossRef]
- Farrell, S.L.; Kurtz, N.; Connor, L.N.; Elder, B.C.; Leuschen, C.; Markus, T.; McAdoo, D.C.; Panzer, B.; Richter-Menge, J.; Sonntag, J.G. A First Assessment of IceBridge Snow and Ice Thickness Data Over Arctic Sea Ice. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2098–2111. [Google Scholar] [CrossRef]
- Zhou, L.; Stroeve, J.; Xu, S.; Petty, A.; Tilling, R.; Winstrup, M.; Rostosky, P.; Lawrence, I.R.; Liston, G.E.; Ridout, A.; et al. Inter-comparison of snow depth over sea ice from multiple methods. Cryosphere Discuss. 2020, 2020, 1–35. [Google Scholar] [CrossRef]
- Mallett, R.D.C.; Lawrence, I.R.; Stroeve, J.C.; Landy, J.C.; Tsamados, M. Brief communication: Conventional assumptions involving the speed of radar waves in snow introduce systematic underestimates to sea ice thickness and seasonal growth rate estimates. Cryosphere 2020, 14, 251–260. [Google Scholar] [CrossRef]
- Massom, R.A.; Eicken, H.; Hass, C.; Jeffries, M.O.; Drinkwater, M.R.; Sturm, M.; Worby, A.P.; Wu, X.; Lytle, V.I.; Ushio, S.; et al. Snow on Antarctic sea ice. Rev. Geophys. 2001, 39, 413–445. [Google Scholar] [CrossRef]
- Filhol, S.; Sturm, M. Snow bedforms: A review, new data, and a formation model. J. Geophys. Res. Earth Surf. 2015, 120, 1645–1669. [Google Scholar] [CrossRef]
- Trujillo, E.; Leonard, K.; Maksym, T.; Lehning, M. Changes in snow distribution and surface topography following a snowstorm on Antarctic sea ice. J. Geophys. Res. Earth Surf. 2016, 121, 2172–2191. [Google Scholar] [CrossRef]
- Weissling, B.; Lewis, M.; Ackley, S. Sea-ice thickness and mass at Ice Station Belgica, Bellingshausen Sea, Antarctica. Deep Sea Res. Part II Top. Stud. Oceanogr. 2011, 58, 1112–1124. [Google Scholar] [CrossRef]
- Petty, A.A.; Tsamados, M.C.; Kurtz, N.T.; Farrell, S.L.; Newman, T.; Harbeck, J.P.; Feltham, D.L.; Richter-Menge, J.A. Characterizing Arctic sea ice topography using high-resolution IceBridge data. Cryosphere 2016, 10, 1161–1179. [Google Scholar] [CrossRef]
- Beck, J.; Prazdny, K.; Rosenfeld, A. A theory of textural segmentation. In Human and Machine Vision; Elsevier: Amsterdam, The Netherlands, 1983; pp. 1–38. [Google Scholar] [CrossRef]
- Chen, J.; Pappas, T.N.; Mojsilovic, A.; Rogowitz, B.E. Adaptive perceptual color-texture image segmentation. IEEE Trans. Image Process. 2005, 14, 1524–1536. [Google Scholar] [CrossRef]
- Porat, M.; Zeevi, Y.Y. Localized texture processing in vision: Analysis and synthesis in the Gaborian space. IEEE Trans. Biomed. Eng. 1989, 36, 115–129. [Google Scholar] [CrossRef] [PubMed]
- Simoncelli, E.P.; Freeman, W.T.; Adelson, E.H.; Heeger, D.J. Shiftable multiscale transforms. IEEE Trans. Inf. Theory 1992, 38, 587–607. [Google Scholar] [CrossRef]
- Simoncelli, E.P.; Freeman, W.T. The steerable pyramid: A flexible architecture for multi-scale derivative computation. In Proceedings of the International Conference on Image Processing, Washington, DC, USA, 23–26 October 1995; Volume 3, pp. 444–447. [Google Scholar] [CrossRef]
- Cohen, A.; Daubechies, I.; Feauveau, J.C. Biorthogonal bases of compactly supported wavelets. Commun. Pure Appl. Math. 1992, 45, 485–560. [Google Scholar] [CrossRef]
- Soh, L.K.; Tsatsoulis, C. Texture analysis of SAR sea ice imagery using gray level co-occurrence matrices. IEEE Trans. Geosci. Remote Sens. 1999, 37, 780–795. [Google Scholar] [CrossRef]
- Clausi, D.A.; Yue, B. Comparing cooccurrence probabilities and Markov random fields for texture analysis of SAR sea ice imagery. IEEE Trans. Geosci. Remote Sens. 2004, 42, 215–228. [Google Scholar] [CrossRef]
- Yu, Q.; Moloney, C.; Williams, F.M. SAR sea-ice texture classification using discrete wavelet transform based methods. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 5, pp. 3041–3043. [Google Scholar] [CrossRef]
- Zakhvatkina, N.Y.; Alexandrov, V.Y.; Johannessen, O.M.; Sandven, S.; Frolov, I.Y. Classification of Sea Ice Types in ENVISAT Synthetic Aperture Radar Images. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2587–2600. [Google Scholar] [CrossRef]
- Ressel, R.; Frost, A.; Lehner, S. A Neural Network-Based Classification for Sea Ice Types on X-Band SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3672–3680. [Google Scholar] [CrossRef]
- Zakhvatkina, N.; Smirnov, V.; Bychkova, I. Satellite SAR Data-based Sea Ice Classification: An Overview. Geosciences 2019, 9, 152. [Google Scholar] [CrossRef]
- Kim, J.; Kim, D.; Hwang, B.J. Characterization of Arctic Sea Ice Thickness Using High-Resolution Spaceborne Polarimetric SAR Data. IEEE Trans. Geosci. Remote Sens. 2012, 50, 13–22. [Google Scholar] [CrossRef]
- Shi, L.; Karvonen, J.; Cheng, B.; Vihma, T.; Lin, M.; Liu, Y.; Wang, Q.; Jia, Y. Sea ice thickness retrieval from SAR imagery over Bohai sea. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 4864–4867. [Google Scholar] [CrossRef]
- Zhang, X.; Dierking, W.; Zhang, J.; Meng, J.; Lang, H. Retrieval of the thickness of undeformed sea ice from simulated C-band compact polarimetric SAR images. Cryosphere 2016, 10, 1529–1545. [Google Scholar] [CrossRef]
- Wang, L.; Scott, K.A.; Xu, L.; Clausi, D.A. Sea Ice Concentration Estimation During Melt From Dual-Pol SAR Scenes Using Deep Convolutional Neural Networks: A Case Study. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4524–4533. [Google Scholar] [CrossRef]
- Aldenhoff, W.; Heuzé, C.; Eriksson, L.E.B. Sensitivity of Radar Altimeter Waveform to Changes in Sea Ice Type at Resolution of Synthetic Aperture Radar. Remote Sens. 2019, 11, 2602. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.; Cheng, X.; Hu, Y. Retrieval of Snow Depth over Arctic Sea Ice Using a Deep Neural Network. Remote Sens. 2019, 11, 2864. [Google Scholar] [CrossRef]
- Studinger, M. IceBridge ATM L1B elevation and return strength, Version 2. NSIDC 2018. [Google Scholar] [CrossRef]
- Panzer, B.; Gomez-Garcia, D.; Leuschen, C.; Paden, J.; Rodriguez-Morales, F.; Patel, A.; Markus, T.; Holt, B.; Gogineni, P. An ultra-wideband, microwave radar for measuring snow thickness on sea ice and mapping near-surface internal layers in polar firn. J. Glaciol. 2013, 59, 244–254. [Google Scholar] [CrossRef]
- Kanagaratnam, P.; Markus, T.; Lytle, V.; Heavey, B.; Jansen, P.; Prescott, G.; Gogineni, S.P. Ultrawideband radar measurements of thickness of snow over sea ice. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2715–2724. [Google Scholar] [CrossRef]
- Kurtz, N.T.; Farrell, S.L. Large-scale surveys of snow depth on Arctic sea ice from Operation IceBridge. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Onana, V.; Kurtz, N.T.; Farrell, S.L.; Koenig, L.S.; Studinger, M.; Harbeck, J.P. A Sea-Ice Lead Detection Algorithm for Use With High-Resolution Airborne Visible Imagery. IEEE Trans. Geosci. Remote Sens. 2013, 51, 38–56. [Google Scholar] [CrossRef]
- Wang, X.; Xie, H.; Ke, Y.; Ackley, S.F.; Liu, L. A method to automatically determine sea level for referencing snow freeboards and computing sea ice thicknesses from NASA IceBridge airborne LIDAR. Remote Sens. Environ. 2013, 131, 160–172. [Google Scholar] [CrossRef]
- Dominguez, R. IceBridge DMS L1B Geolocated and Orthorectified Images, Version 1 [2009–2014] (updated 2015). NSIDC 2010. [Google Scholar] [CrossRef]
- Chelton, D.B.; DeSzoeke, R.A.; Schlax, M.G.; El Naggar, K.; Siwertz, N. Geographical variability of the first baroclinic Rossby radius of deformation. J. Phys. Oceanogr. 1998, 28, 433–460. [Google Scholar] [CrossRef]
- Sibson, R. A Brief Description of Natural Neighbour Interpolation; Interpreting Multivariate Data; Wiley: Chichester, UK, 1981; pp. 21–53. [Google Scholar]
- Paden, J.; Li, J.; Leuschen, C.; Rodriguez-Morales, F.; Hale, R. IceBridge Snow Radar L1B Geolocated Radar Echo Strength Profiles, Version 2. (updated 2019). NSIDC 2014. [Google Scholar] [CrossRef]
- Kwok, R.; Panzer, B.; Leuschen, C.; Pang, S.; Markus, T.; Holt, B.; Gogineni, S. Airborne surveys of snow depth over Arctic sea ice. J. Geophys. Res. Ocean. 2011, 116. [Google Scholar] [CrossRef]
- Kwok, R.; Haas, C. Effects of radar side-lobes on snow depth retrievals from Operation IceBridge. J. Glaciol. 2015, 61, 576–584. [Google Scholar] [CrossRef]
- Tiuri, M.; Sihvola, A.; Nyfors, E.; Hallikaiken, M. The complex dielectric constant of snow at microwave frequencies. IEEE J. Ocean. Eng. 1984, 9, 377–382. [Google Scholar] [CrossRef]
- Massom, R.A.; Drinkwater, M.R.; Haas, C. Winter snow cover on sea ice in the Weddell Sea. J. Geophys. Res. Ocean. 1997, 102, 1101–1117. [Google Scholar] [CrossRef]
- Arndt, S.; Paul, S. Variability of Winter Snow Properties on Different Spatial Scales in the Weddell Sea. J. Geophys. Res. Ocean. 2018, 123, 8862–8876. [Google Scholar] [CrossRef]
- Worby, A.P.; Markus, T.; Steer, A.D.; Lytle, V.I.; Massom, R.A. Evaluation of AMSR-E snow depth product over East Antarctic sea ice using in situ measurements and aerial photography. J. Geophys. Res. Ocean. 2008, 113. [Google Scholar] [CrossRef]
- Hosking, J.R.M. L-moments: Analysis and estimation of distributions using linear combinations of order statistics. J. R. Stat. Soc. Ser. B 1990, 52, 105–124. [Google Scholar] [CrossRef]
- Jain, A.K.; Farrokhnia, F. Unsupervised texture segmentation using Gabor filters. In Proceedings of the 1990 IEEE International Conference on Systems, Man, and Cybernetics Conference Proceedings, Los Angeles, CA, USA, 4–7 November 1990; pp. 14–19. [Google Scholar] [CrossRef]
- Suzuki, S.; Abe, K. Topological structural analysis of digitized binary images by border following. Comput. Vis. Graph. Image Process. 1985, 30, 32–46. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Klambauer, G.; Unterthiner, T.; Mayr, A.; Hochreiter, S. Self-normalizing neural networks. In Advances in Neural Information Processing Systems; Curran Associates, Inc.: Red Hook, NY, USA, 2017; pp. 971–980. [Google Scholar]
- LeNail, A. NN-SVG: Publication-Ready Neural Network Architecture Schematics. J. Open Source Softw. 2019, 4, 77. [Google Scholar] [CrossRef]
- Freeman, W.T.; Adelson, E.H. The design and use of steerable filters. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 891–906. [Google Scholar] [CrossRef]
- Giles, K.; Laxon, S.; Wingham, D.; Wallis, D.; Krabill, W.; Leuschen, C.; McAdoo, D.; Manizade, S.; Raney, R. Combined airborne laser and radar altimeter measurements over the Fram Strait in May 2002. Remote Sens. Environ. 2007, 111, 182–494. [Google Scholar] [CrossRef]
- Maksym, T.; Markus, T. Antarctic sea ice thickness and snow-to-ice conversion from atmospheric reanalysis and passive microwave snow depth. J. Geophys. Res. Ocean. 2008, 113. [Google Scholar] [CrossRef]
- Yi, D.; Zwally, H.J.; Robbins, J.W. ICESat observations of seasonal and interannual variations of sea-ice freeboard and estimated thickness in the Weddell Sea, Antarctica (2003–2009). Ann. Glaciol. 2011, 52, 43–51. [Google Scholar] [CrossRef]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mei, M.J.; Maksym, T. A Textural Approach to Improving Snow Depth Estimates in the Weddell Sea. Remote Sens. 2020, 12, 1494. https://doi.org/10.3390/rs12091494
Mei MJ, Maksym T. A Textural Approach to Improving Snow Depth Estimates in the Weddell Sea. Remote Sensing. 2020; 12(9):1494. https://doi.org/10.3390/rs12091494
Chicago/Turabian StyleMei, M. Jeffrey, and Ted Maksym. 2020. "A Textural Approach to Improving Snow Depth Estimates in the Weddell Sea" Remote Sensing 12, no. 9: 1494. https://doi.org/10.3390/rs12091494
APA StyleMei, M. J., & Maksym, T. (2020). A Textural Approach to Improving Snow Depth Estimates in the Weddell Sea. Remote Sensing, 12(9), 1494. https://doi.org/10.3390/rs12091494