Near-Real-Time Application of SEVIRI Aerosol Optical Depth Algorithm



Abstract

1. Introduction
2. Materials and Methods
2.1. Extended SEVIRI AOD Calculations for New Country Domains
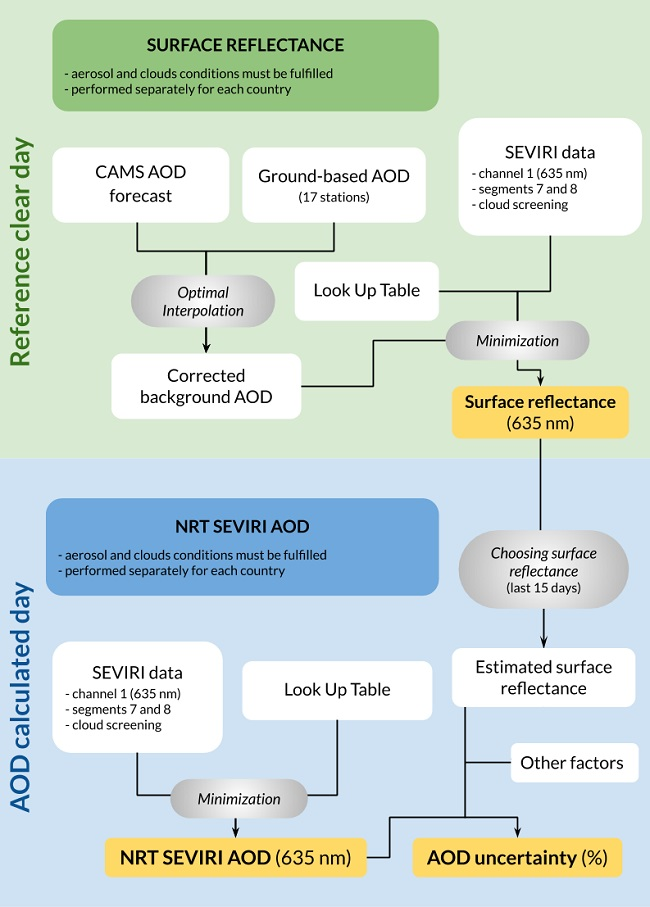
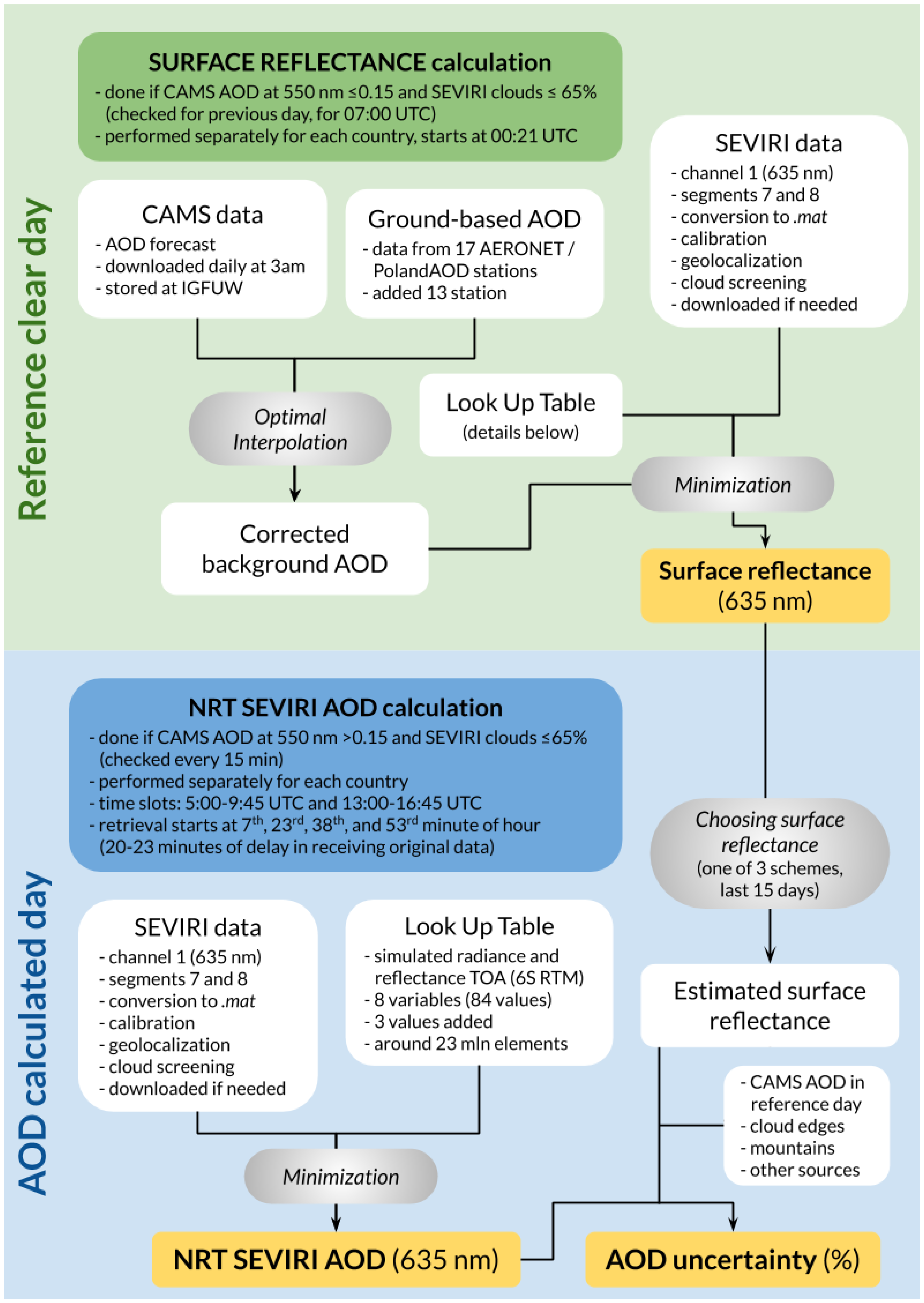
2.2. Surface Reflectance Estimation
2.3. AOD Uncertainty Estimation
3. Results
3.1. Surface Reflectance Calculations
3.2. NRT AOD Retrieval
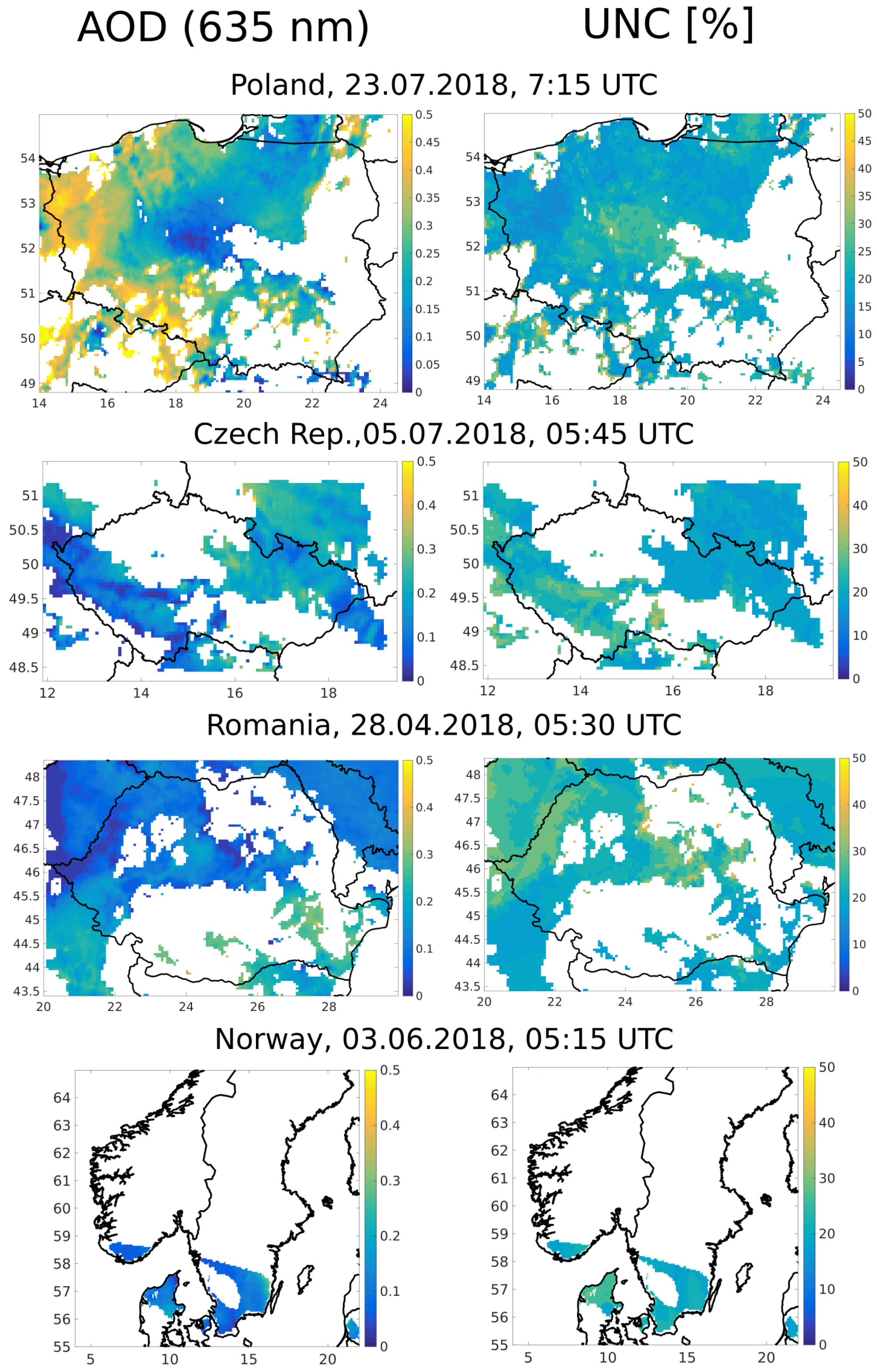
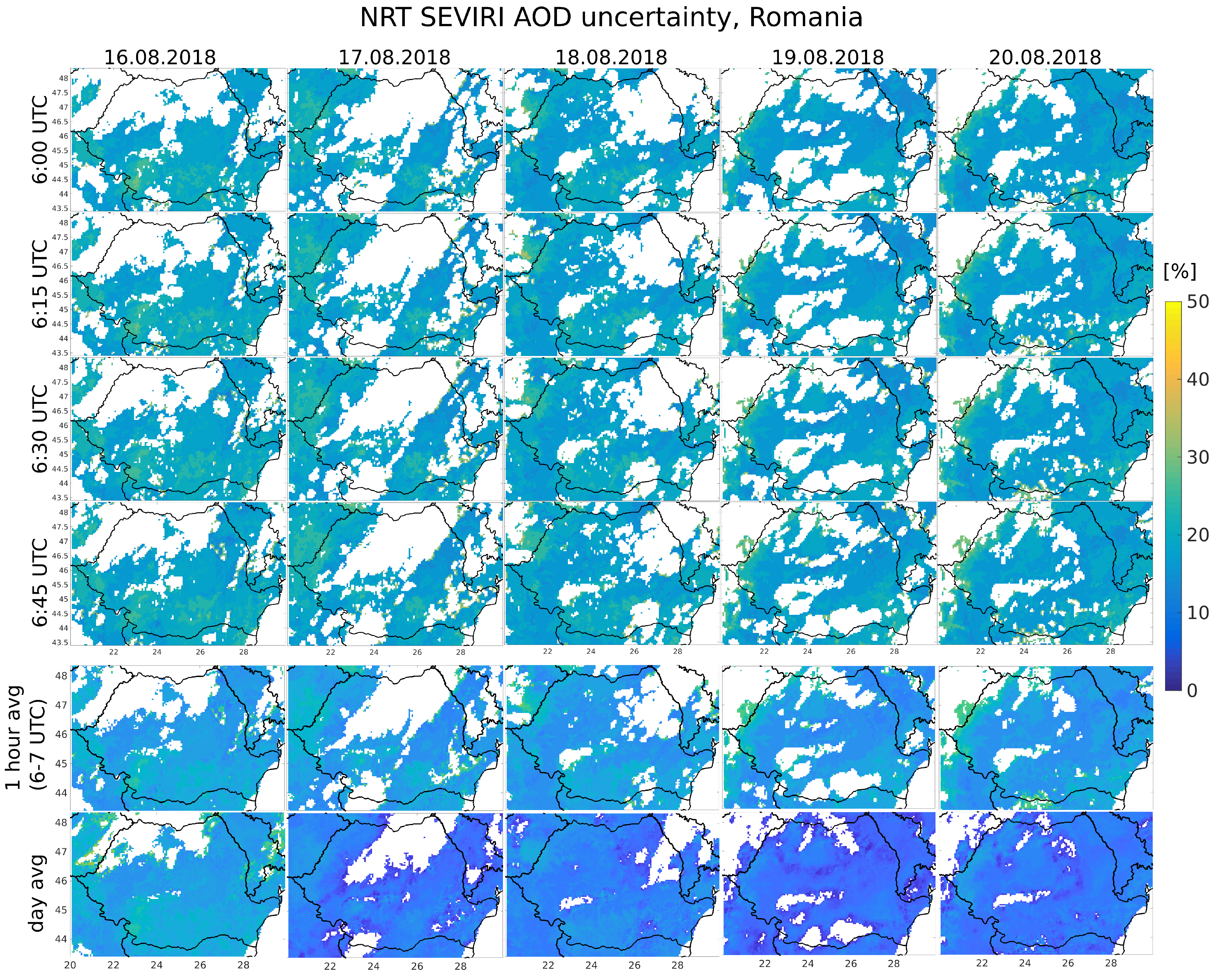
3.3. Example of the NRT Calculations
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- EEA. Air Quality in Europe—2019 Report; European Environment Agency Report No 10/2019; EEA: Copenhagen, Denmark, 2019; Volume 272. [Google Scholar]
- Aminou, D.M. MSG’s SEVIRI Instrument. ESA Bull. 2000, 111, 15–17. [Google Scholar]
- Govaerts, Y.M.; Arriaga, A.; Schmetz, J. Operational vicarious calibration of the MSG/SEVIRI solar channels. Adv. Space Res. 2001, 28, 21–30. [Google Scholar] [CrossRef]
- Govaerts, Y.M.; Wagner, S.; Lattanzio, A.; Watts, P. Joint retrieval of surface reflectance and aerosol optical depth from MSG/SEVIRI observations with an optimal estimation approach, 1. Theory. J. Geophys. Res. 2010, 115, D02203. [Google Scholar] [CrossRef]
- Jolivet, D.; Ramon, D.; Riedi, J.; Roebeling, R. Aerosol retrievals from METEOSAT-8. SAF on Climate Monitoring, Visiting Scientist Report 2006. Available online: https://www.knmi.nl/kennis-en-datacentrum/publicatie/aerosol-retrievals-from-meteosat-8 (accessed on 27 November 2019).
- Jolivet, D.; Ramon, D.; Bernard, E.; Deschamps, P.-Y.; Riedi, J.; Nicolas, J.M.; Hagolle, O. Aerosol monitoring over land using MSG/SEVIRI. In Proceedings of the EUMETSAT Meteorological Satellite Conference, Darmstadt, Germany, 8–12 September 2008. [Google Scholar]
- Popp, C.; Hauser, A.; Foppa, N.; Wunderle, S. Remote sensing of aerosol optical depth over central Europe from MSG-SEVIRI data and accuracy assessment with ground-based AERONET measurements. J. Geophys. Res. 2007, 112, D24S11. [Google Scholar] [CrossRef]
- Brindley, H.E.; Russell, J.E. An assessment of Saharan dust loading and the corresponding cloud-free long-wave direct radiative effect from geostationary satellite observations. J. Geophys. Res. 2009, 114, D23201. [Google Scholar] [CrossRef]
- Carrer, D.; Roujean, J.L.; Hautecoeur, O.; Elias, T. Daily estimates of aerosol optical thickness over land surface based on a directional and temporal analysis of SEVIRI MSG visible observations. J. Geophys. Res. 2010, 115, D10208. [Google Scholar] [CrossRef]
- Bernard, E.; Moulin, C.; Ramon, D.; Jolivet, D.; Riedi, J.; Nicolas, J.-M. Description and validation of an AOT product over land at the 0.6 mm channel of the SEVIRI sensor onboard MSG. Atmos. Meas. Tech. 2011, 4, 2543–2565. [Google Scholar] [CrossRef]
- Bulgin, C.E.; Palmer, P.I.; Merchant, C.J.; Siddans, R.; Gonzi, S.; Poulsen, C.A.; Gareth, E.; Thomas, G.E.; Sayer, A.M.; Carboni, E.; et al. Quantifying the response of the ORAC aerosol optical depth retrieval for MSG SEVIRI to aerosol model assumptions. J. Geophys. Res. 2011, 116, D05208. [Google Scholar] [CrossRef]
- Mei, L.; Xue, Y.; de Leeuw, G.; Holzer-Popp, T.; Guang, J.; Li, Y.; Yang, L.; Xu, X.; Li, C.; Wang, Y.; et al. Retrieval of aerosol optical depth over land based on a time series technique using MSG/SEVIRI data. Atmos. Chem. Phys. 2012, 12, 9167–9185. [Google Scholar] [CrossRef]
- Carboni, E.; Thomas, G.E.; Sayer, A.M.; Siddans, R.; Poulsen, C.A.; Grainger, R.G.; Ahn, C.; Antoine, D.; Bevan, S.; Braak, R.; et al. Intercomparison of desert dust optical depth from satellite measurements. Atmos. Meas. Tech. 2013, 5, 1973–2002. [Google Scholar] [CrossRef]
- Zawadzka, O.; Markowicz, K.M. Retrieval of Aerosol Optical Depth from Optimal Interpolation Approach Applied to SEVIRI Data. Remote. Sens. 2014, 6, 7182–7211. [Google Scholar] [CrossRef]
- Fernandes, A.P.; Riffler, M.; Ferreira, J.; Wunderle, S.; Borrego, C.; Tchepeld, O. Comparisons of aerosol optical depth provided by SEVIRI satellite observations and CAMx air quality modelling. In Proceedings of the 36th International Symposium on Remote Sensing of Environment, Berlin, Germany, 11–15 May 2015; Schreier, G., Skrovseth, P.E., Staudenrausch, H., Eds.; Copernicus Gesellschaft Mbh: Gottingen, Germany, 2015; pp. 187–193. [Google Scholar]
- Gonzalez, L.; Briottet, X. North Africa and Saudi Arabia day/night sandstorm survey (NASCube). Remote. Sens. 2017, 9, 896. [Google Scholar] [CrossRef]
- Sowden, M.; Mueller, U.; Blake, D. Review of surface particulate monitoring of dust events using geostationary satellite remote sensing. Atmos. Environ. 2018, 183, 154–164. [Google Scholar] [CrossRef]
- Clerbaux, N.; Ipe, A.; De Bock, V.; Urbain, M.; Baudrez, E.; Velazquez-Blazquez, A.; Akkermans, T.; Moreels, J.; Hollmann, R.; Selbach, N.; et al. CM SAF Aerosol Optical Depth (AOD) Data Record–Edition 1. Satell. Appl. Facil. Clim. Monit. 2017. [Google Scholar] [CrossRef]
- Ignatov, A.; Stowe, L. Aerosol retrievals from individual AVHRR channels. Part I: Retrieval algorithm, and transition from Dave to 6S RTM. J. Atmos. Sci. 2002, 59, 313–334. [Google Scholar] [CrossRef]
- Stachlewska, I.S.; Samson, M.; Zawadzka, O.; Harenda, K.M.; Janicka, L.; Poczta, P.; Szczepanik, D.; Heese, B.; Wang, D.; Borek, K.; et al. Modification of local urban aerosol properties by long-range transport of biomass burning aerosol. Remote. Sens. 2018, 10, 412. [Google Scholar] [CrossRef]
- Stachlewska, I.S.; Zawadzka, O.; Engelmann, R. Effect of heatwave conditions on aerosol optical properties derived from satellite and ground-based remote sensing over Poland. Remote. Sens. 2017, 9, 1199. [Google Scholar] [CrossRef]
- Zawadzka, O.; Stachlewska, I.S.; Markowicz, K.M.; Nemuc, A.; Stebel, K. Validation of new satellite aerosol optical depth retrieval algorithm using Raman lidar observations at Radiative Transfer Laboratory in Warsaw. EPJ Web Conf. 2018, 176, 04008. [Google Scholar] [CrossRef][Green Version]
- Vermote, E.; Tanré, D.; Deuzé, J.; Herman, M.; Morcrette, J.J. Second Simulation of the Satellite Signal in the Solar Spectrum, 6S: An overview. IEEE Trans. Geosci. Remote. Sens. 1997, 35, 675–686. [Google Scholar] [CrossRef]
- Vermote, E.; Tanré, D.; Deuzé, J.; Herman, M.; Morcrette, J.J.; Kotchenova, S.Y. Second Simulation of a Satellite Signal in the Solar Spectrum—Vector (6SV); Laboratoire d’Optique Atmosphérique: Lille, France, 2006. [Google Scholar]
- Riedi, J.; Nicolas, J.M. Science Modules msg.c; Laboratoire d’Optique Atmospherique: Lille, France, 2005. [Google Scholar]
- Benedetti, A.; Morcrette, J.-J.; Boucher, O.; Dethof, A.; Engelen, R.J.; Fischer, M.; Flentjes, H.; Huneeus, N.; Jones, L.; Kaiser, J.W.; et al. Aerosol analysis and forecast in the ECMWF Integrated Forecast System. Part II: Data assimilation. J. Geophys. Res. 2009, 114, D13205. [Google Scholar] [CrossRef]
- Morcrette, J.-J.; Boucher, O.; Jones, L.; Salmond, D.; Bechtold, P.; Beljaars, A.; Benedetti, A.; Bonet, A.; Kaiser, J.W.; Razinger, M.; et al. Aerosol analysis and forecast in the ECMWF Integrated Forecast System. Part I: Forward modelling. J. Geophys. Res. 2009, 114D, D06206. [Google Scholar]
- Rodgers, C. Inverse Methods for Atmospheric Sounding: Theory and Practice; World Scientific: Singapore, 2002. [Google Scholar]
- Kalnay, E. Atmospheric Modeling, Data Assimilation, and Predictability; Cambridge University Press: New York, NY, USA, 2003. [Google Scholar]
- Ghill, M.; Malanotte-Rizzoli, P. Data assimilation in meteorology and oceanography. Adv. Geophys. 1991, 33, 141–266. [Google Scholar]
- Talagrand, O. Assimilation of observations, an introduction. J. Meteorol. Soc. Jpn. 1997, 75, 191–209. [Google Scholar] [CrossRef]
- Holben, B.N.; Eck, T.F.; Slutsker, I.; Tanré, D.; Buis, J.P.; Setzer, A.; Vermote, E.; Reagan, J.A.; Kaufman, Y.J.; Nakajima, T.; et al. AERONET—A federated instrument network and data archive for aerosol characterization. Remote. Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Eck, T.F.; Holben, B.N.; Reid, J.S.; Dubovik, O.; Smirnov, A.; O’Neill, N.T.; Slutsker, I.; Kinne, S. Wavelength dependence of the optical depth of biomass burning, urban and desert dust aerosols. J. Geophys. Res. 1999, 104, 31333–31350. [Google Scholar] [CrossRef]
- EUMETSAT. Typical Radiometric Accuracy Noise MSG-1/2. Available online: https://www.eumetsat.int/website/wcm/idc/idcplg?IdcService=GET_FILE&dDocName=PDF_TYP_RADIOMET_ACC_MSG-1-2&RevisionSelectionMethod=LatestReleased&Rendition=Web (accessed on 27 November 2019).
- Wang, D.; Szczepanik, D.; Stachlewska, I.S. Interrelations between surface, boundary layer, and columnar aerosol properties over a continental urban site. Atmos. Chem. Phys. Discuss. 2019, 19, 13097–13128. [Google Scholar] [CrossRef]
- Ajtai, N.; Radovici, A.; Mereuta, A.; Botezan, C.; Stachlewska, I.; Zawadzka-Manko, O.; Stebel, K.; Zehner, C.; Stefanie, H. SEVIRI Aerosol Optical Depth validation using AERONET and MODIS data in central and eastern Europe. Remote Sens. in preparation.
- Boldeanu, M.; Nemuc, A.; Nicolae, D.; Nicolae, V.; Zawadzka-Manko, O.; Stachlewska, I.S.; Ajtai, N.; Dumitrache, R. AOD to PM2.5 conversion algorithm using WRF-Chem and satellite data. Remote Sens. in preparation.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country | Longitude | Res. | Latitude | Res. | Domain (Pixels) | File Size (.nc) |
|---|---|---|---|---|---|---|
| Poland | 14–24.5E | 0.07 | 48.8–55N | 0.045 | 138 × 151 | 685 kB |
| Romania | 20–29.94E | 0.07 | 43.4–48.36N | 0.045 | 111 × 143 | 527 kB |
| Czech | 11.9–19.46E | 0.07 | 48.3–51.49N | 0.045 | 72 × 109 | 270 kB |
| Norway | 4–21.99E | 0.07 | 55–64.99N | 0.045 | 223 × 258 | 1.9 MB |
| Country | Station | Instrument | LON [] | LAT [] |
|---|---|---|---|---|
| Belsk | CIMEL | 20.792 | 51.837 | |
| Raciborz | CIMEL | 18.190 | 50.080 | |
| Poland | Rzecin | CIMEL | 16.310 | 52.762 |
| Sopot | MFR-7 | 18.565 | 54.451 | |
| Strzyzow | CIMEL, MFR-7 | 21.861 | 49.879 | |
| Warsaw | CIMEL, MFR-7 | 20.970 | 52.210 | |
| Bucarest | CIMEL | 26.030 | 44.348 | |
| Cluj | CIMEL | 23.551 | 46.768 | |
| Eforie | CIMEL | 28.632 | 44.075 | |
| Romania | Galata Platform (Bulgaria) | CIMEL | 28.193 | 43.045 |
| Gloria | CIMEL | 29.360 | 44.600 | |
| Iasi | CIMEL | 27.556 | 47.193 | |
| Kishinev (Moldova) | CIMEL | 28.816 | 47.000 | |
| Czech | Brno Airport | CIMEL | 16.683 | 49.156 |
| Birkenes | CIMEL | 8.252 | 58.388 | |
| Norway | Gustaw Dalen Tower (Sweden) | CIMEL | 17.467 | 58.594 |
| Palgrunden (Sweden) | CIMEL | 13.152 | 58.755 |
| Component | Thresholds | Share of Total Uncertainty |
|---|---|---|
| surfREFL ≤ 0.025 | 4% | |
| UsurfREFL | 0.025 < surfREFL ≤ 0.05 | 6% |
| 0.05 < surfREFL ≤ 0.1 | 8% | |
| 0.1 < surfREFL | 10% | |
| AODREF ≤ 0.05 | 0.8 | |
| UAODREF | 0.05 < AODREF ≤ 0.1 | 1 |
| 0.1 < AODREF ≤ 0.15 | 1.2 | |
| 0.15 < AODREF | 1.5 | |
| AOD ≤ 0.15 | 2 | |
| UAOD | 0.15 < AOD ≤ 0.3 | 1.5 |
| 0.3 < AOD ≤ 0.5 | 1 | |
| 0.5 < AOD | 0.5 | |
| CL | cloudy neighbour, AOD > 0.4 | 0 or 15% |
| Other sources | constant value | 10% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zawadzka-Manko, O.; Stachlewska, I.S.; Markowicz, K.M. Near-Real-Time Application of SEVIRI Aerosol Optical Depth Algorithm. Remote Sens. 2020, 12, 1481. https://doi.org/10.3390/rs12091481
Zawadzka-Manko O, Stachlewska IS, Markowicz KM. Near-Real-Time Application of SEVIRI Aerosol Optical Depth Algorithm. Remote Sensing. 2020; 12(9):1481. https://doi.org/10.3390/rs12091481
Chicago/Turabian StyleZawadzka-Manko, Olga, Iwona S. Stachlewska, and Krzysztof M. Markowicz. 2020. "Near-Real-Time Application of SEVIRI Aerosol Optical Depth Algorithm" Remote Sensing 12, no. 9: 1481. https://doi.org/10.3390/rs12091481
APA StyleZawadzka-Manko, O., Stachlewska, I. S., & Markowicz, K. M. (2020). Near-Real-Time Application of SEVIRI Aerosol Optical Depth Algorithm. Remote Sensing, 12(9), 1481. https://doi.org/10.3390/rs12091481