Using Satellite Interferometry to Infer Landslide Sliding Surface Depth and Geometry

 ,
,  ,
, 
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
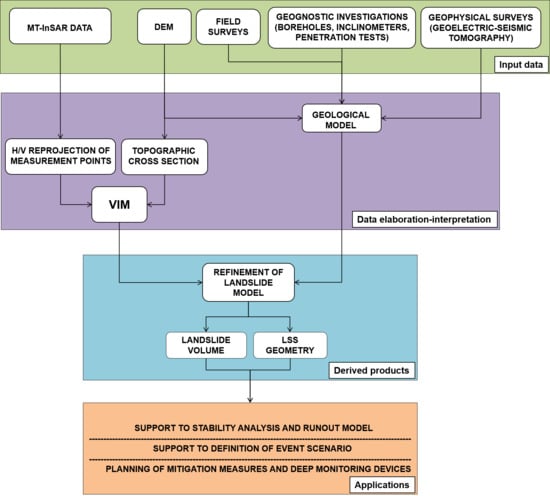
2. Materials and Methods
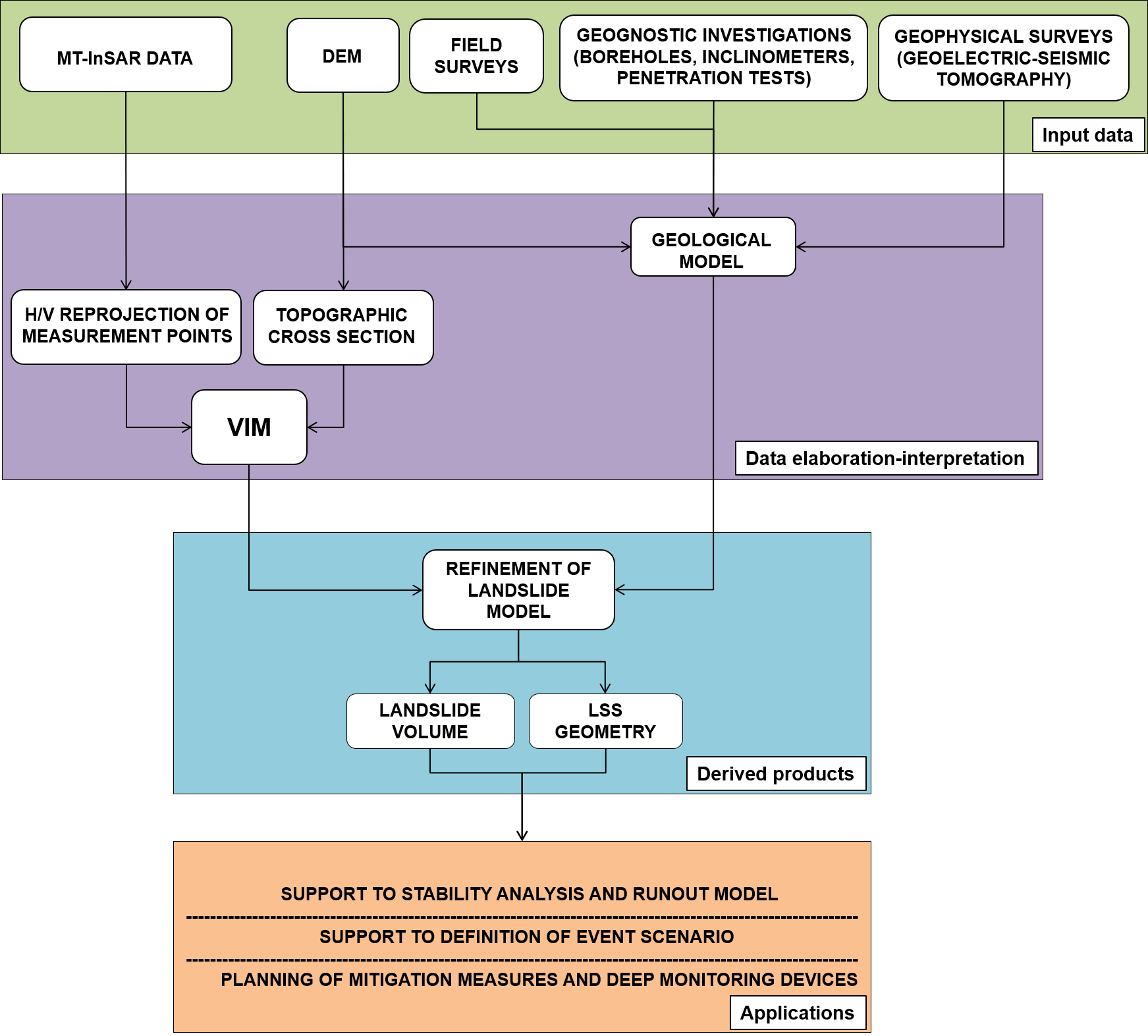
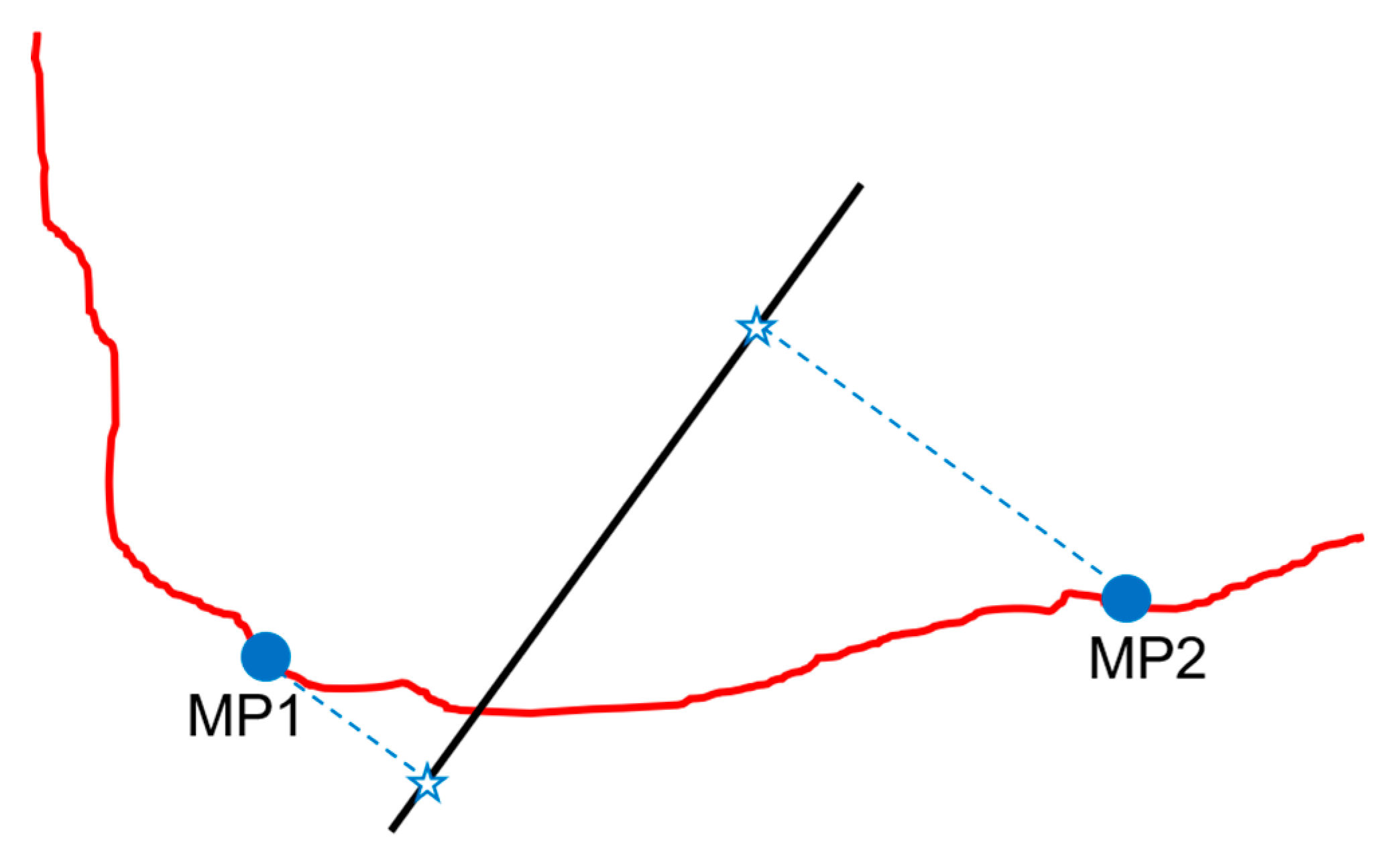
2.1. The Vector Inclination Method
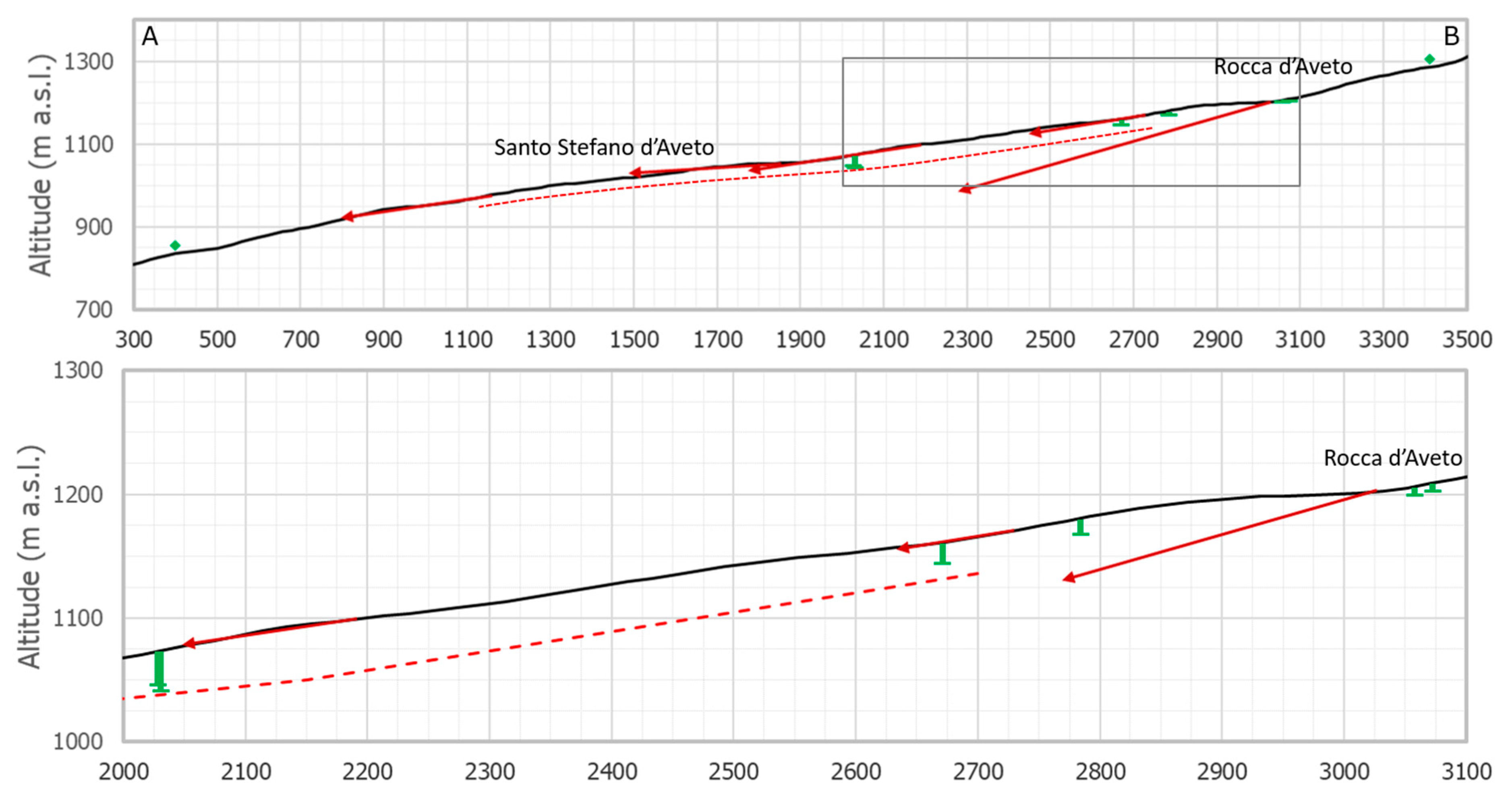
- drawing the cross-section of the landslide intersecting the MPs and marking with arrows the vectors of movement (Vi) measured at each point; note that the first vector should be representative of the movement close to the main scarp.
- drawing the normals to each vector and finding the intersections between two consecutive normals (Oi);
- drawing the bisection lines between two consecutive normals (blue dotted line in Figure 1a);
- drawing a line parallel to the first movement vector (V1), beginning from the back scarp and ending at the intersection with the first bisection line, and finding P1, which represent the first point of the sliding surface.
- a second line, parallel to the second vector (V2) is drawn from P1 to P2. This procedure is repeated for each movement vector;
- the whole procedure is then repeated starting from the toe and working upslope to find a second sliding surface to be interpolated with the first one.
2.2. Satellite Interferometry
3. Results
- Good distribution of measurements: the top, middle and bottom sections of the landslide must be represented by at least one MP each. This criterion also implies that the available data were of good quality, in terms of accuracy.
- Satellite coverage in both geometries: in addition to the criterion above, both geometries are needed in order to derive the vertical and horizontal movement components.
- Different landslide characteristics: the landslides used were different in geological, geomorphological and geometrical terms. In particular, we wanted to stress test VIM on both rotational and translational landslides, with different depths and oriented along different azimuth angles with respect to the satellite LOS.
- Availability of validation tools: to evaluate the effectiveness of the method, independent sources (inclinometers, geological models) of the depth of the LSS were adopted.
- Different satellites: the method was tested using ERS, ENVISAT, and Sentinel-1 data, in order to see whether there were limitations or advantages depending on the satellites used.
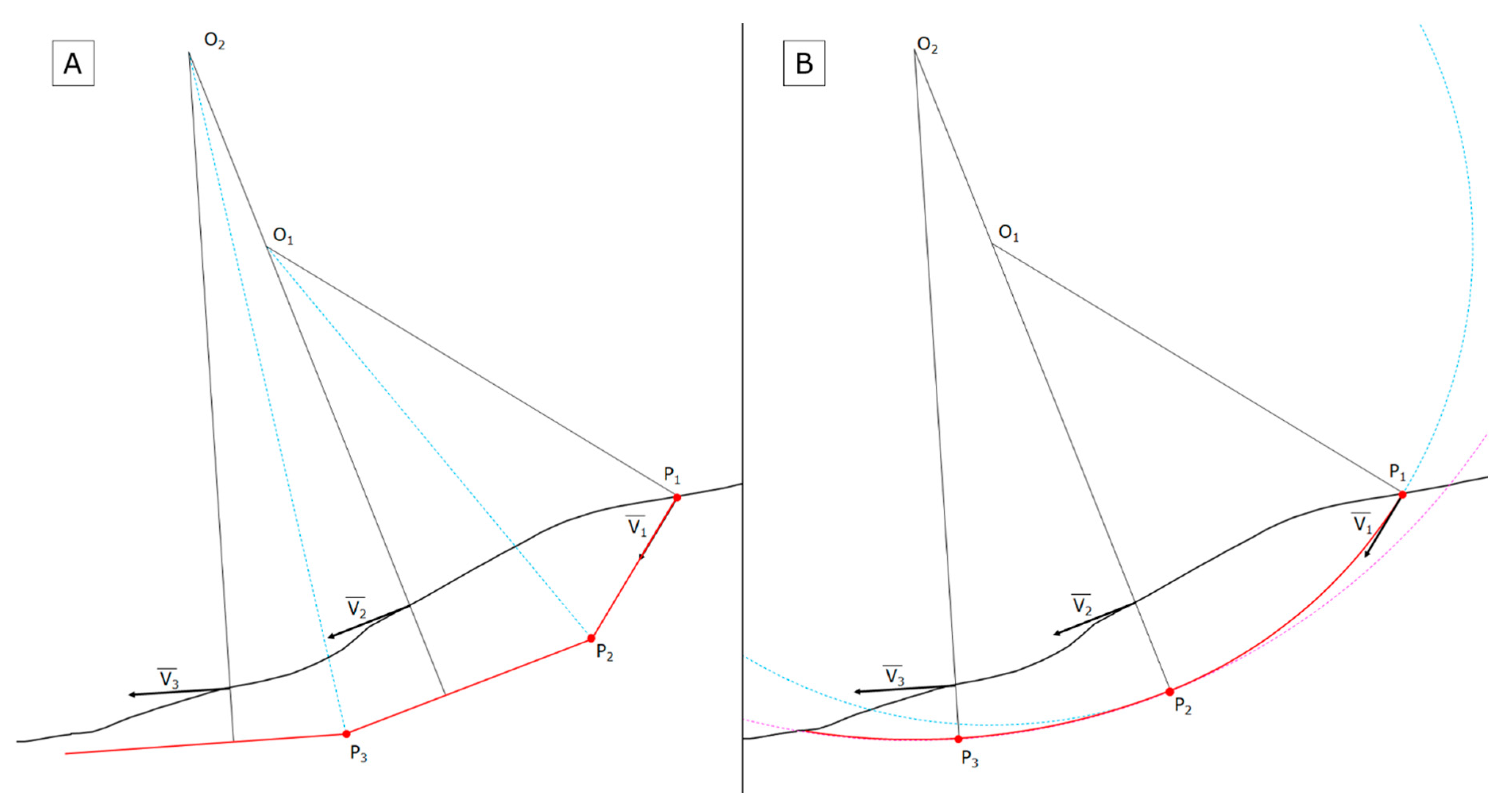
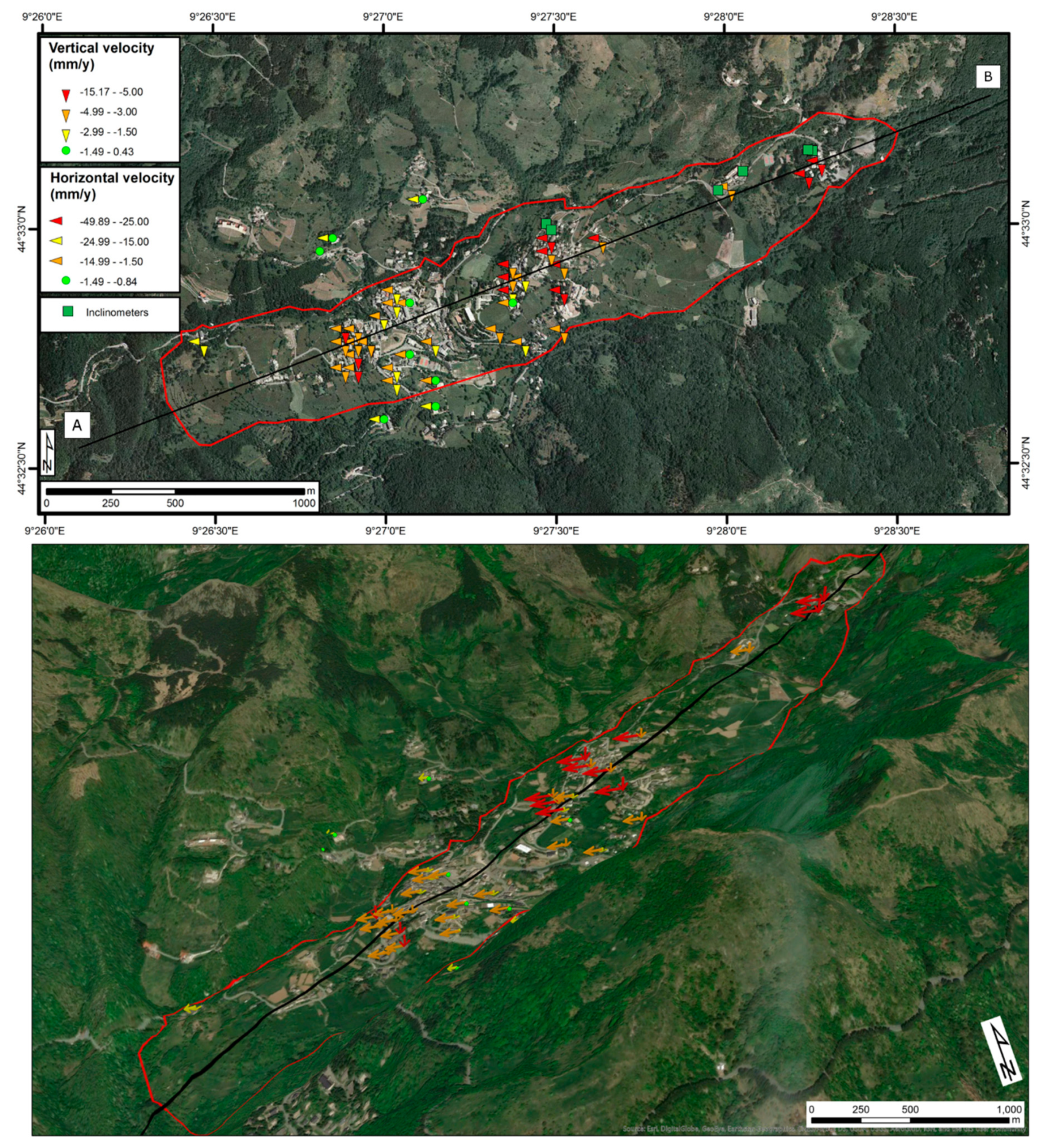
3.1. Santo Stefano d’Aveto Landslide
3.1.1. Santo Stefano d’Aveto General Description
3.1.2. Santo Stefano d’Aveto LSS Results
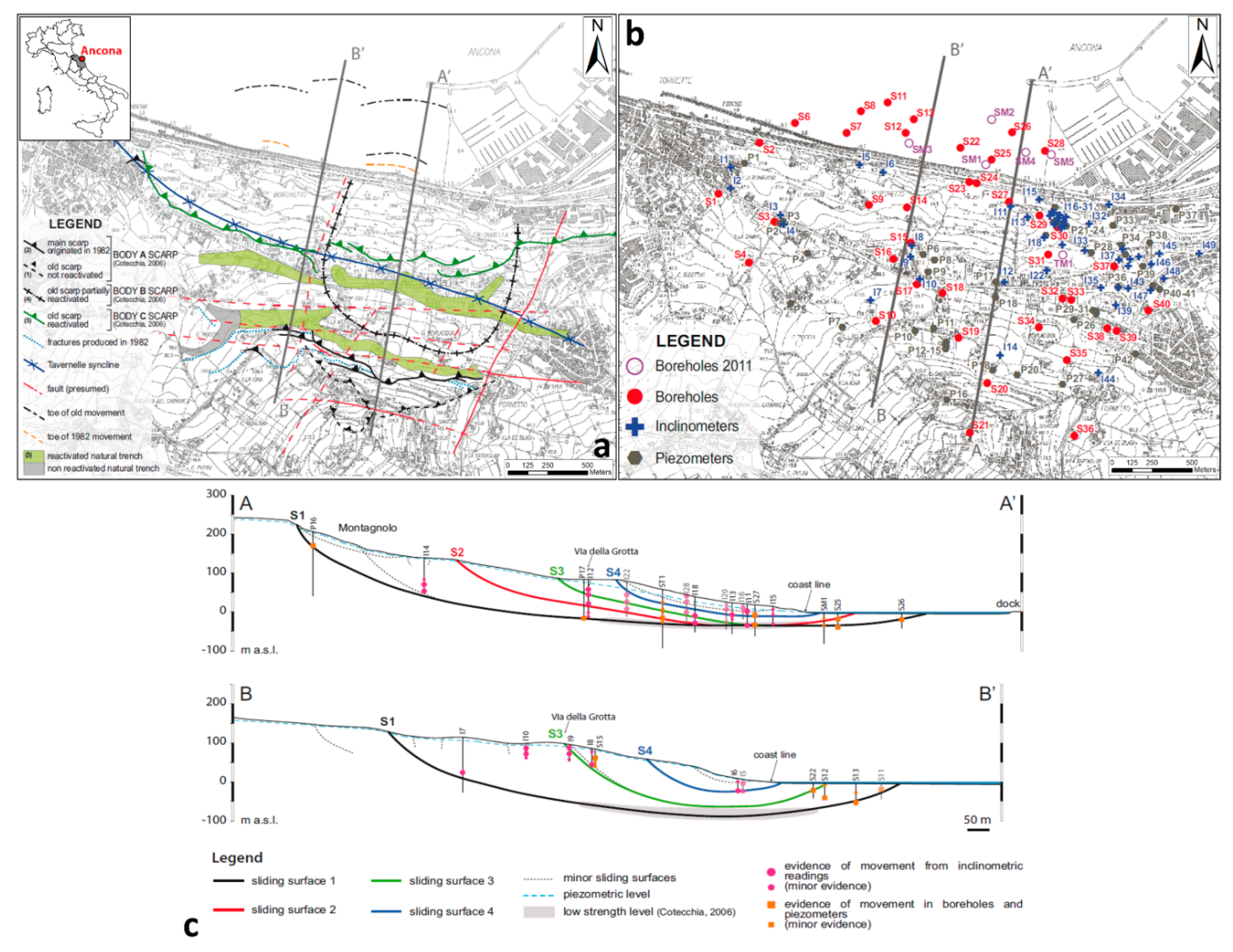
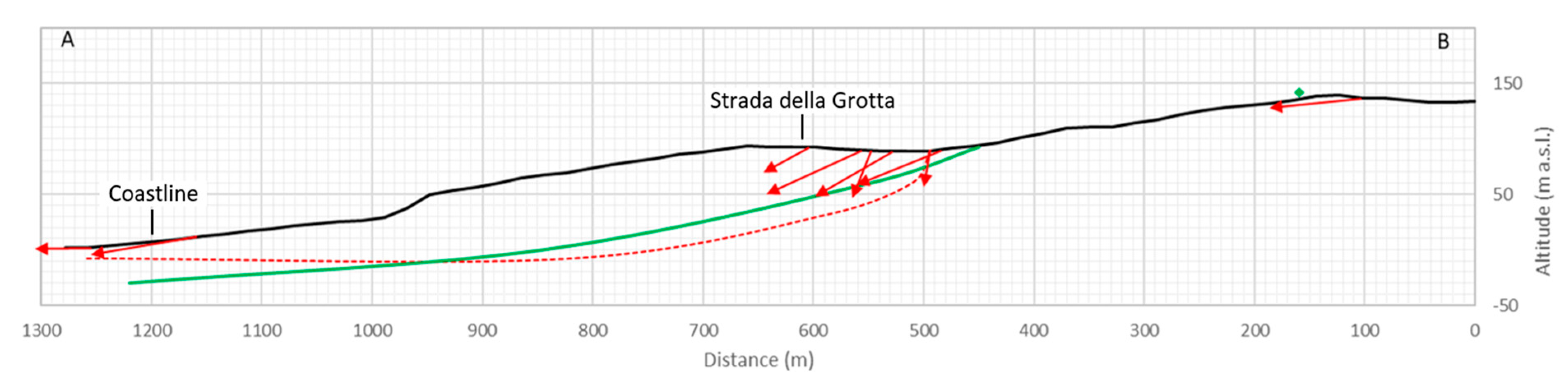
3.2. Ancona Landslide
3.2.1. Ancona Landslide General Description
3.2.2. Ancona LSS Results
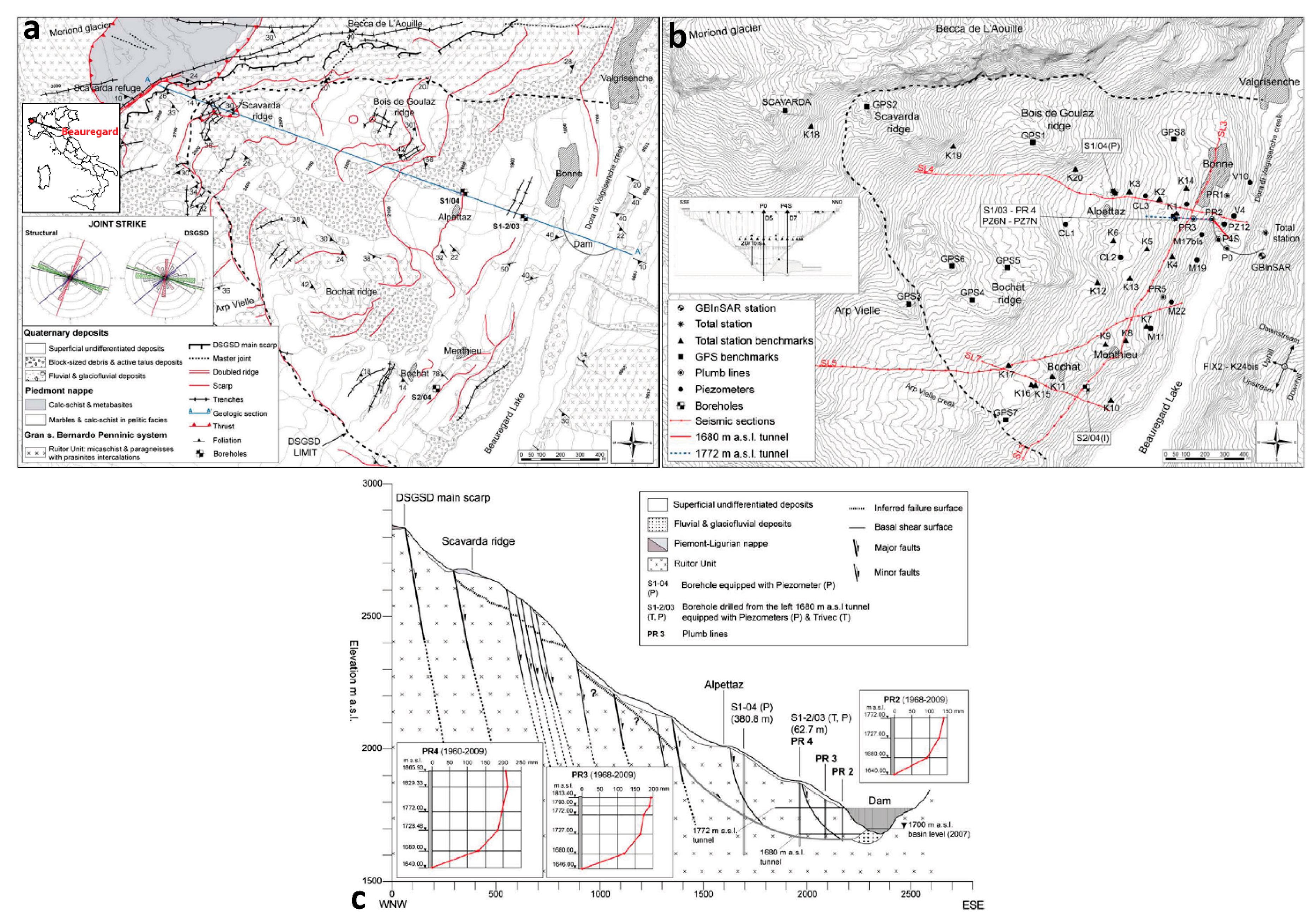
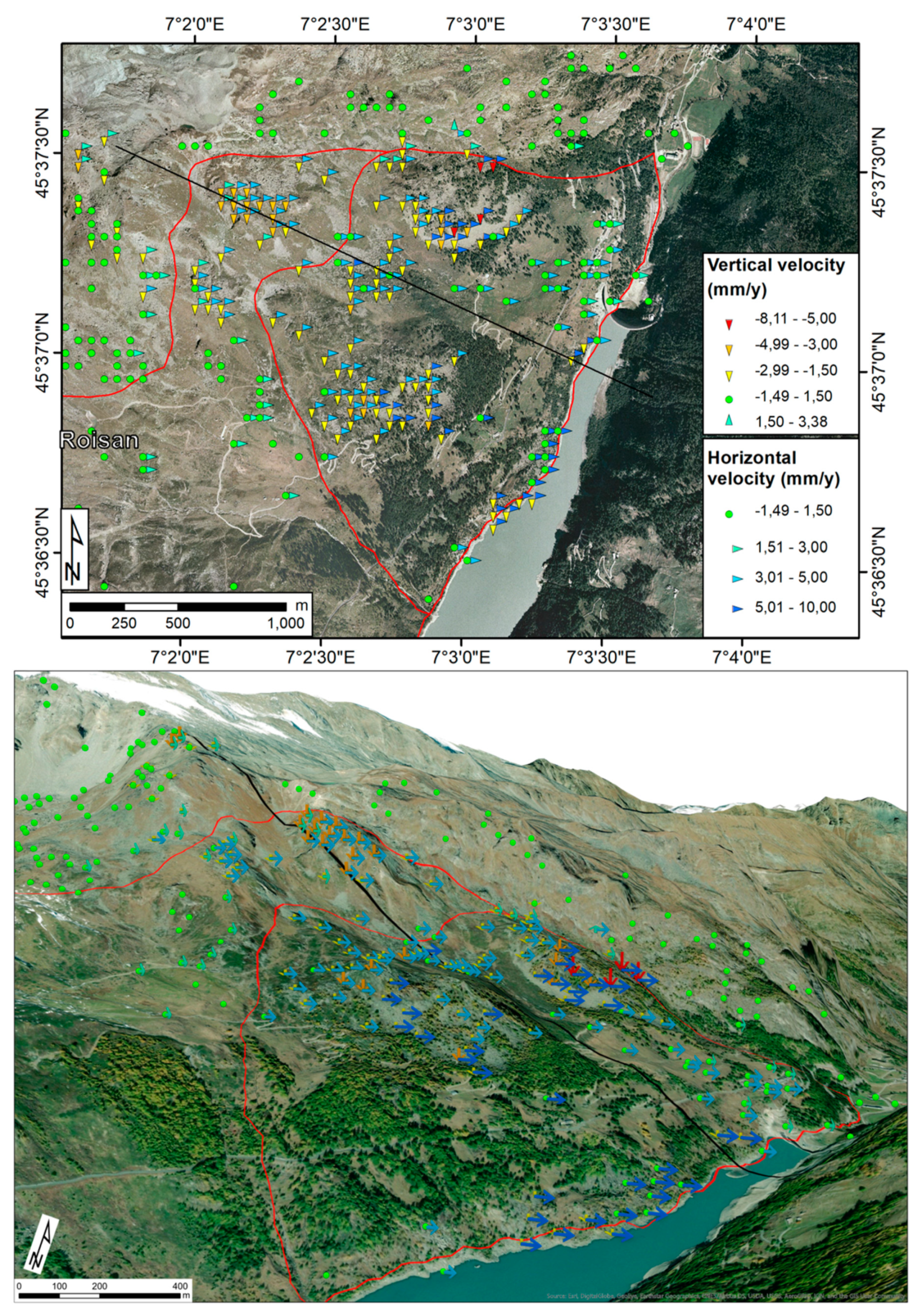
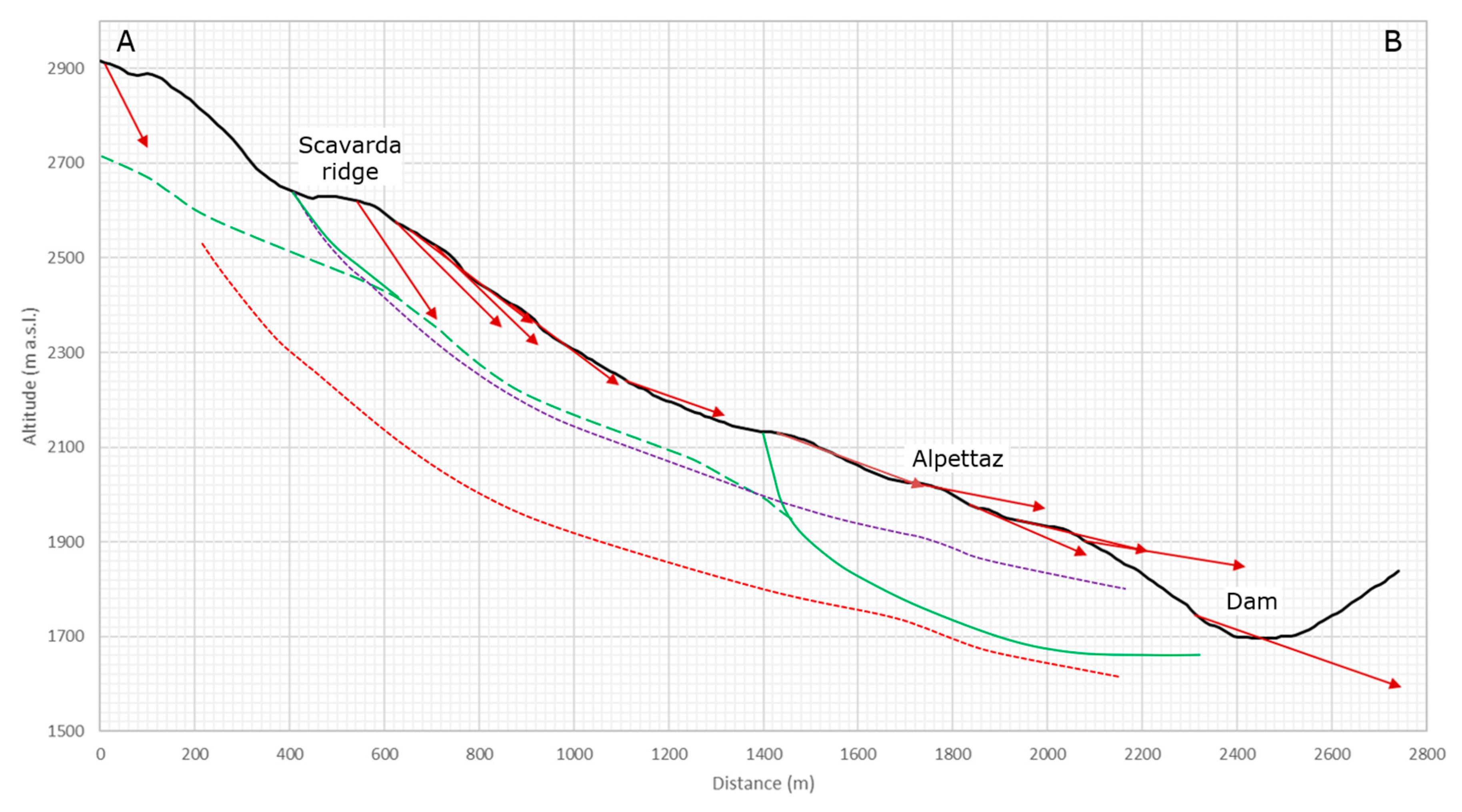
3.3. Beauregard Landslide
3.3.1. General Description
3.3.2. Beauregard LSS Results
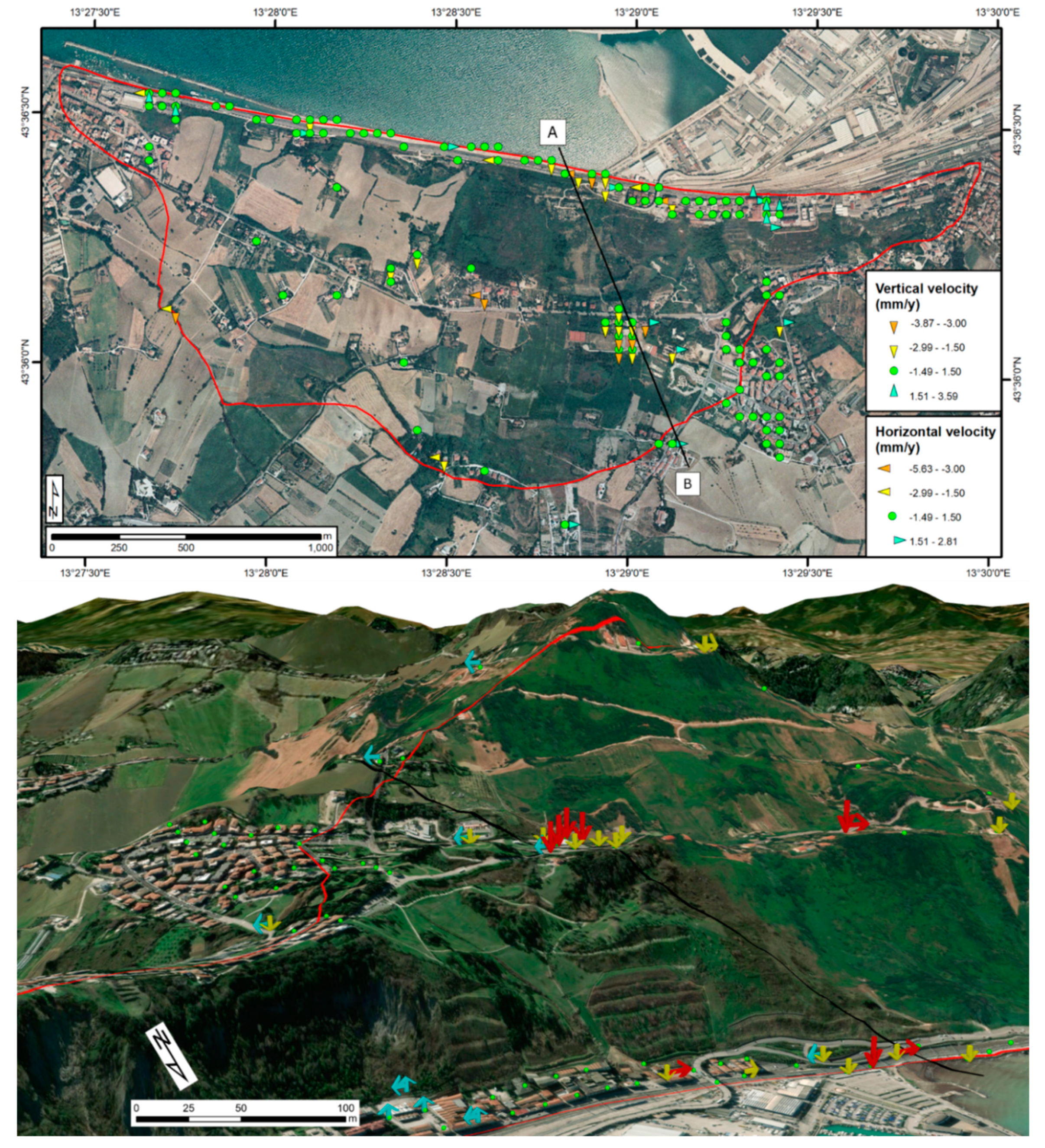
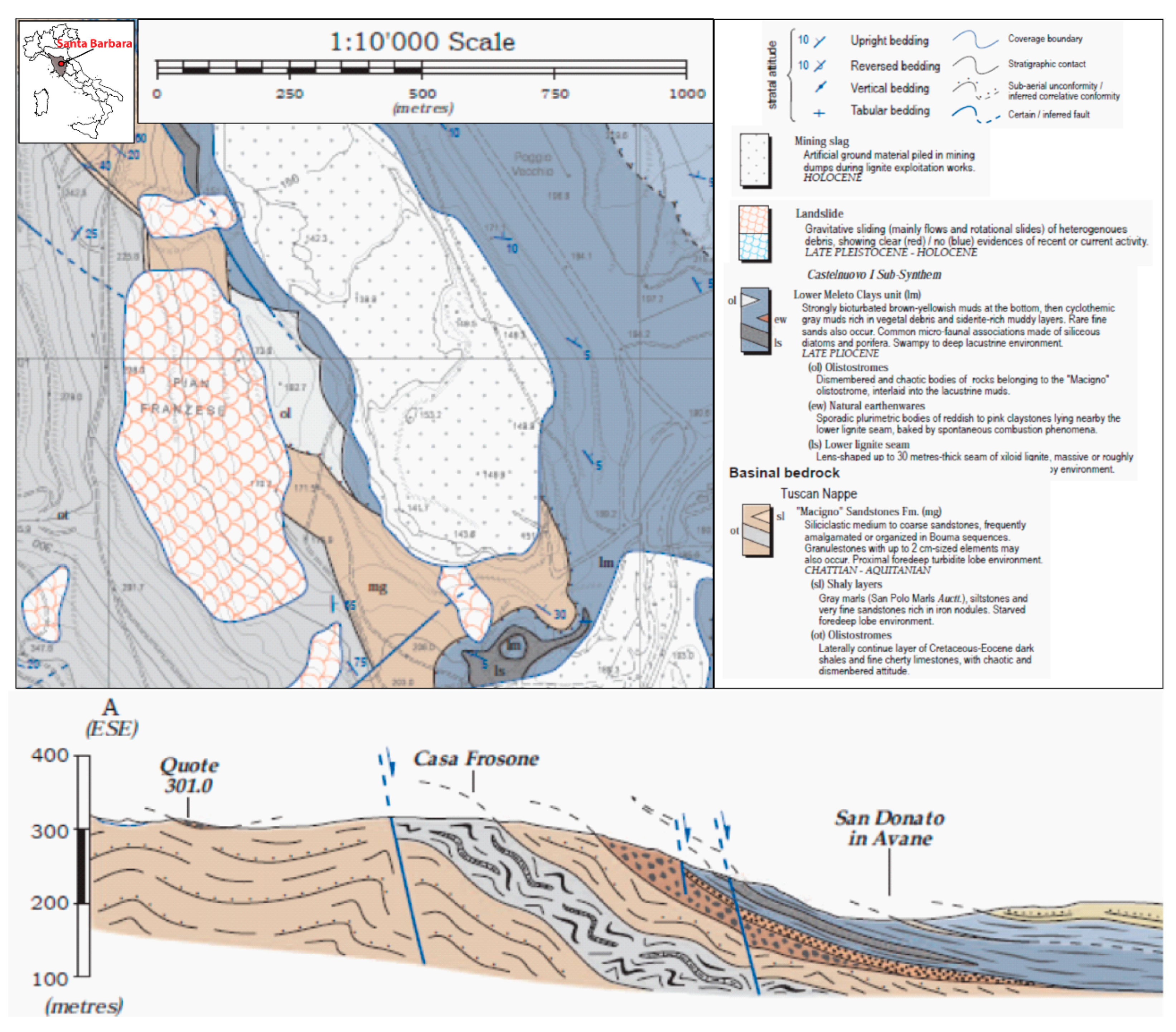
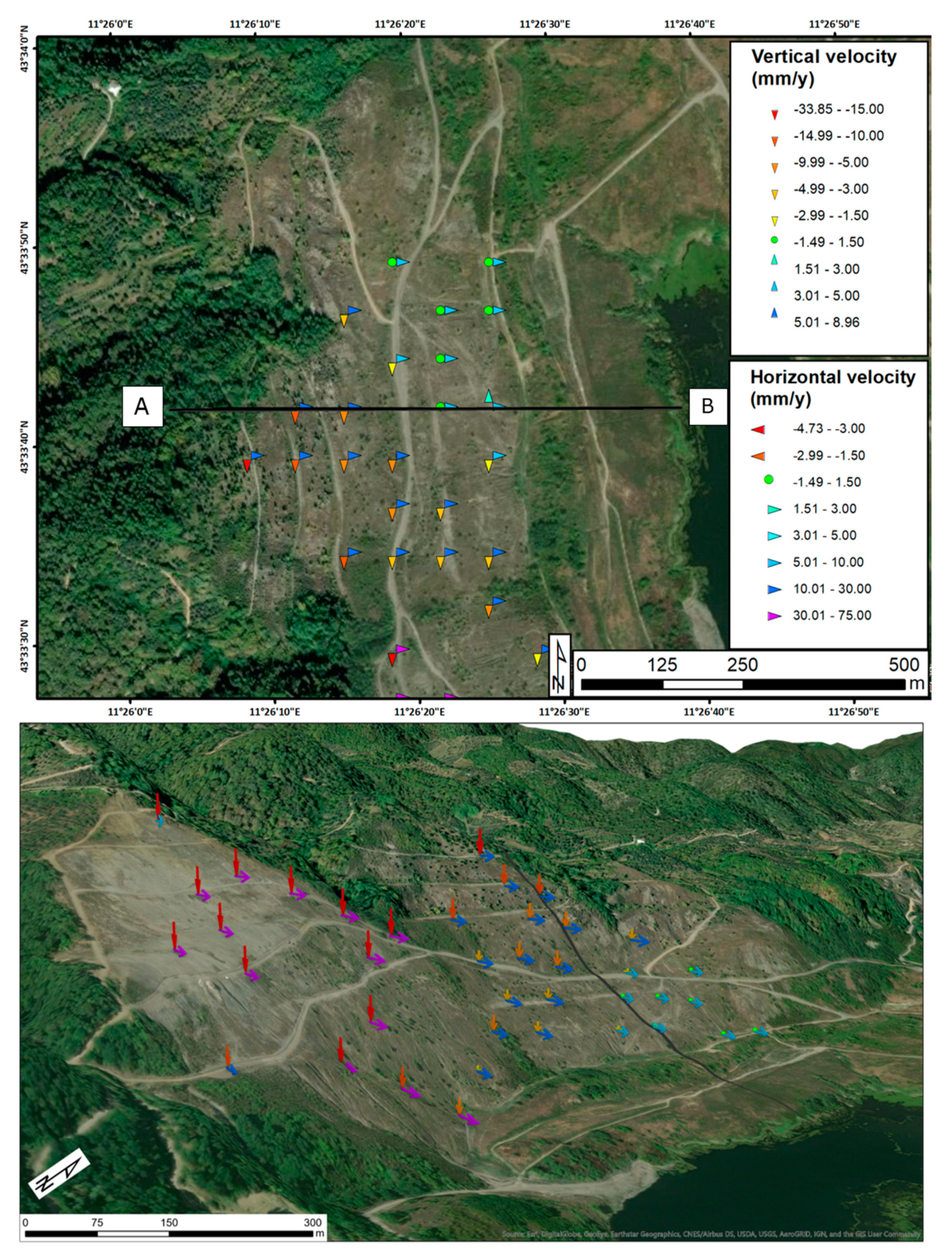
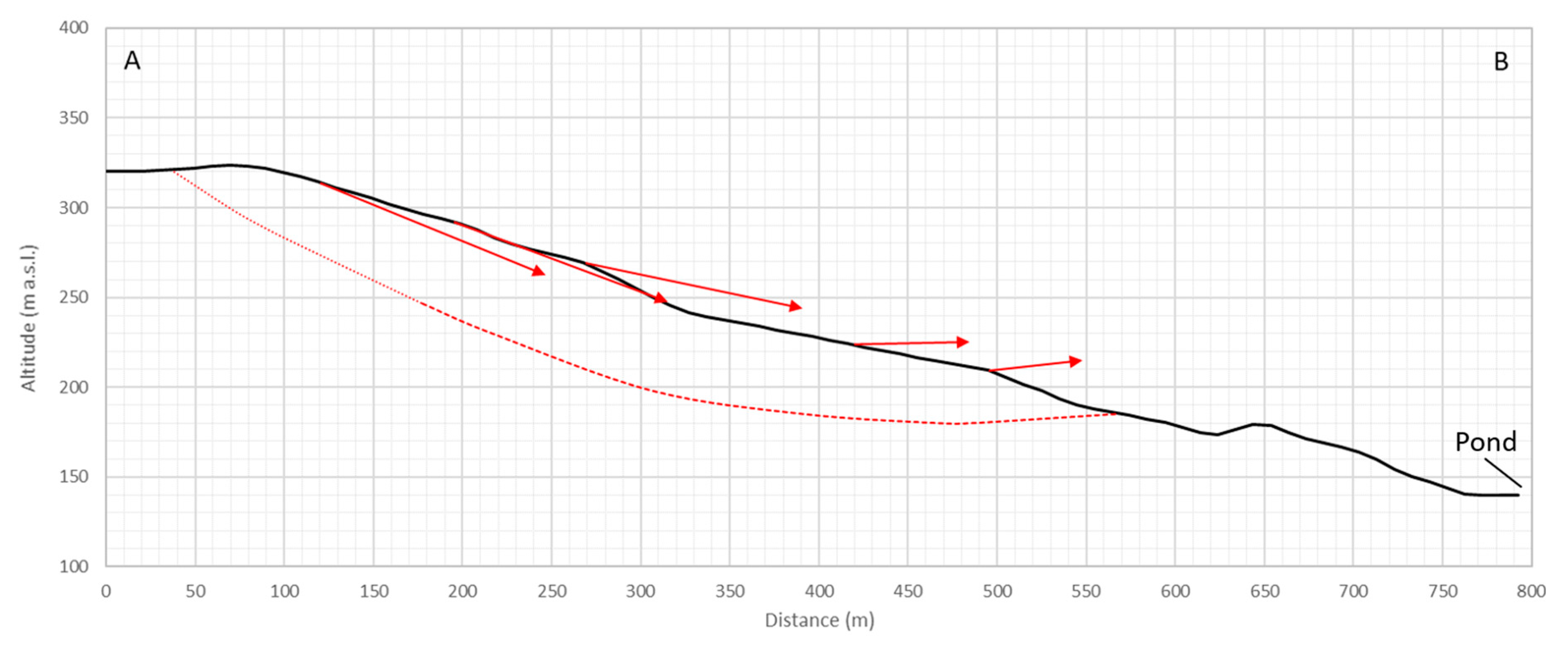
3.4. Santa Barbara Landslide
3.4.1. General Description
3.4.2. Santa Barbara LSS Results
4. Discussion
4.1. Case Studies
4.2. Advantages and Limitations
- MP close to the landslide crown or toe: in absence of geomorphological information or other indications concerning the boundaries of the landslide, this is important for pointing out where the LSS emerges and helps to anchor the rest of the surface. In other words, if MPs are only clustered in the central part of a landslide, no indication of the extent of the landslide or of its behavior at the crown (which is typically where the inclination of the movement vectors is highest) is available, unless it comes from other sources (e.g., surveys).
- High density of MPs: VIM assumes a circular surface until the next MP corrects its shape and intersects it with a new arc. In the cases above this always resulted in compound or translative surfaces. At least in the areas where the LSS is more susceptible to changes in inclination (e.g., near the crown) it is important to have at least two MPs close to each other, such that changes in the LSS geometry can be immediately detected. When MPs are present only in the central part of a landslide, conclusions about the depth of the LSS must rely on assumptions or on external information (e.g., geomorphology, boreholes, etc.); however, its geometry will still be reliable as it is grounded on monitoring data.
- It is difficult to precisely attribute a MP to a portion of the ground, especially after they have been resampled to obtain the vertical and horizontal components. The data used represents spatially averaged value, which can be more representative but can also result in the loss of some information. Therefore, in general, even if the movement vectors are drawn along the cross-section, they are representative of a broader, difficult to define area.
- Satellite interferometry can be affected by atmospheric noise. However, as VIM is only conditioned by the angle of the movement vectors (and not by the modulus), an error in the reading of one or both components is relevant only when the angle changes significantly, which can occur with slowly moving MPs. Conversely, large vectors keep their angle relatively stable even if their components experience some noise.
- Interferometry only measures displacements along the LOS. This means that only a percentage of the total movement can be detected. This is not an intrinsic limitation concerning the application of VIM since, as explained above, only the angle and not the modulus of the movement vectors determines the geometry of the LSS. However, when the line of sight is particularly unfavorable, the measured movements can be so low that the noise can significantly alter the vector inclination (see above).
- Low spatial resolution, especially in low coherence environments (such as vegetated areas), can make it such that the requirements I) and II) explained above are not met.
- Radar interferometry measures surface movements. More than 20 years of studies in this technique applied to landslides have demonstrated that the recorded displacements are highly representative even for deep-seated landslides, however it is also possible that more superficial processes, such as soil creep, can be used to calculate the LSS.
4.3. Comparison and Integration with Other Methods
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Data Availability
References
- Jaboyedoff, M.; Derron, M.H. Methods to Estimate the Surfaces Geometry and Uncertainty of Landslide Failure Surface. In Engineering Geology for Society and Territory; Springer: Cham, Switzerland, 2015; Volume 2, pp. 339–343. [Google Scholar]
- Pappalardo, G.; Mineo, S.; Angrisani, A.C.; Di Martire, D.; Calcaterra, D. Combining field data with infrared thermography and DInSAR surveys to evaluate the activity of landslides: The case study of Randazzo Landslide (NE Sicily). Landslides 2018, 15, 2173–2193. [Google Scholar] [CrossRef]
- Lollino, G. Automated Inclinometric System. In Proceedings of the 6th International Symposium on Landslides, Christchurch, New Zealand, 10 February 1992; A.A. Balkema: Rotterdam, The Netherlands, 1992; pp. 1147–1150. [Google Scholar]
- Lollino, G.; Arattano, M.; Cuccureddu, M. The use of the automatic inclinometric system for landslide early warning: The case of Cabella Ligure (North-Western Italy). Phys. Chem. Earth 2002, 27, 1545–1550. [Google Scholar] [CrossRef]
- Kristensen, L.; Blikra, L.H. Monitoring Displacement on the Mannen Rockslide in Western Norway. In Landslide Science and Practice; Springer: Berlin/Heidelberg, Germany, 2013; pp. 251–256. [Google Scholar]
- Lebourg, T.; Binet, S.; Tric, E.; Jomard, H.; El Bedoui, S. Geophysical survey to estimate the 3D sliding surface and the 4D evolution of the water pressure on part of a deep seated landslide. Terra Nova 2005, 17, 399–406. [Google Scholar] [CrossRef]
- Pazzi, V.; Tanteri, L.; Bicocchi, G.; D’Ambrosio, M.; Caselli, A.; Fanti, R. H/V measurements as an effective tool for the reliable detection of landslide slip surfaces: Case studies of Castagnola (La Spezia, Italy) and Roccalbegna (Grosseto, Italy). Phys. Chem. Earth 2017, 98, 136–153. [Google Scholar] [CrossRef]
- Rainone, M.L.; Torrese, P. HR Reflection Surveys for Seismic Imaging of Unstable Slopes. In Proceedings of the 20th EEGS Symposium on the Application of Geophysics to Engineering and Environmental Problems, Denver, CO, USA, 1–5 April 2007; European Association of Geoscientists & Engineers: Houten, The Netherlands, 2007; pp. 528–536. [Google Scholar]
- Travelletti, J.; Demand, J.; Jaboyedoff, M.; Marillier, F. Mass movement characterization using a reflexion and refraction seismic survey with the sloping local base level concept. Geomorphology 2010, 116, 1–10. [Google Scholar] [CrossRef]
- Pappalardo, G.; Imposa, S.; Barbano, M.S.; Grassi, S.; Mineo, S. Study of landslides at the archaeological site of Abakainon necropolis (NE Sicily) by geomorphological and geophysical investigations. Landslides 2018, 15, 1279–1297. [Google Scholar] [CrossRef]
- Benedetto, A.; Benedetto, F.; Tosti, F. GPR applications for geotechnical stability of transportation infrastructures. Nondestruct. Test. Eval. 2012, 27, 253–262. [Google Scholar] [CrossRef]
- Jongmans, D.; Garambois, S. Geophysical investigation of landslides: A review. Bull. Soc. Géol. France 2007, 178, 101–112. [Google Scholar] [CrossRef]
- Jakobson, B. Landslide at Surte on the Göta River. R. Swed. Geotech. Inst. Proc. 1952, 5, 1–121. [Google Scholar]
- Bishop, K.M. Determination of translational landslide slip surface depth using balanced cross sections. Environ. Eng. Geosci. 1999, 2, 147–156. [Google Scholar] [CrossRef]
- Bally, A.W.; Gordy, P.L.; Stewart, G.A. Structure, seismic data and orogenic evolution of southern Canadian Rocky Mountains. Bull. Can. Petrol. Geol. 1966, 14, 337–381. [Google Scholar]
- Woodward, N.B.; Boyer, S.E.; Suppe, J. Balanced Geological Cross-Sections: An Essential Technique. In Geological Research and Exploration; AGU: Washington, DC, USA, 1989. [Google Scholar]
- Nikolaeva, E.; Walter, T.; Shirzaei, M.; Zschau, J. Landslide observation and volume estimation in central Georgia based on L-band InSAR. Nat. Hazards Earth Syst. Sci. 2014, 14, 675–688. [Google Scholar] [CrossRef]
- Aryal, A.; Brooks, B.A.; Reid, M.E. Landslide subsurface slip geometry inferred from 3-D surface displacement fields. Geophys. Res. Lett. 2015, 42, 1411–1417. [Google Scholar] [CrossRef]
- Fleming, R.W.; Johnson, A.M. Structures associated with strike-slip faults that bound landslide elements. Eng. Geol. 1989, 27, 39–114. [Google Scholar] [CrossRef]
- Hu, X.; Lu, Z.; Pierson, T.C.; Kramer, R.; George, D.L. Combining InSAR and GPS to Determine Transient Movement and Thickness of a Seasonally Active Low-Gradient Translational Landslide. Geophys. Res. Lett. 2018, 45, 1453–1462. [Google Scholar] [CrossRef]
- Booth, A.M.; Lamb, M.P.; Avouac, J.P.; Delacourt, C. Landslide velocity, thickness, and rheology from remote sensing: La Clapière landslide, France. Geophys. Res. Lett. 2013, 40, 4299–4304. [Google Scholar] [CrossRef]
- Delbridge, B.G.; Bürgman, R.; Fielding, E.; Hensley, S.; Schulz, W.H. Three-dimensional surface deformation derived from airborne interferometric UAVSAR: Application to the Slumgullion Landslide. J. Geophys. Res. Solid Earth 2016, 121, 3951–3977. [Google Scholar] [CrossRef]
- Huang, M.H.; Fielding, E.J.; Liang, C.; Milillo, P.; Bekaert, D.; Dreger, D.; Salzer, J. Coseismic deformation and triggered landslides of the 2016 Mw 6.2 Amatrice earthquake in Italy. Geophys. Res. Lett. 2017, 44, 1266–1274. [Google Scholar] [CrossRef]
- Simonett, D.S. Landslide distribution and earthquakes in the Bewani and Torricelli Mountains, New Guinea. In Landform Studies from Australia and New Guinea; Jennings, J.N., Mabbutt, J.A., Eds.; Cambridge University Press: Cambridge, UK, 1967; pp. 64–84. [Google Scholar]
- Hovius, N.; Stark, C.P.; Allen, P.A. Sediment flux from a mountain belt derived by landslide mapping. Geology 1997, 25, 231–234. [Google Scholar] [CrossRef]
- Larsen, I.J.; Montgomery, D.R.; Korup, O. Landslide erosion controlled by hillslope material. Nat. Geosci. 2010, 3, 247–251. [Google Scholar] [CrossRef]
- Fuyii, Y. Frequency distribution of landslides caused by heavy rain-fall. J. Seismol. Soc. Jpn. 1969, 22, 244–247. [Google Scholar] [CrossRef]
- Dussauge, C.; Grasso, J.R.; Helmstetter, A. Statistical analysis of rockfall volume distributions: Implications for rockfall dynamics. J. Geophys. Res. 2003, 108, 2286. [Google Scholar] [CrossRef]
- Simoni, A.; Ponza, A.; Picotti, V.; Berti, M.; Dinelli, E. Earthflow sediment production and Holocene sediment record in a large Apennine catchment. Geomorphology 2013, 188, 42–53. [Google Scholar] [CrossRef]
- Handwerger, A.L.; Roering, J.J.; Schmidt, D.A. Controls on the seasonal deformation of slow-moving landslides. Earth Planet. Sci. Lett. 2013, 377, 239–247. [Google Scholar] [CrossRef]
- Carter, M.; Bentley, S.P. The geometry of slip surfaces beneath landslides: Predictions from surface measurements. Can. Geotech. J. 1985, 22, 234–238. [Google Scholar] [CrossRef]
- Cruden, D.M. The geometry of slip surfaces beneath landslides: Predictions from surface measurements: Discussion. Can. Geotech. J. 1986, 23, 94. [Google Scholar] [CrossRef]
- Intrieri, E.; Carlà, T.; Farina, P.; Bardi, F.; Ketizmen, H.; Casagli, N. Satellite Interferometry as a Tool for Early Warning and Aiding Decision Making in an Open-Pit Mine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019. [Google Scholar] [CrossRef]
- Bardi, F.; Frodella, W.; Ciampalini, A.; Bianchini, S.; Del Ventisette, C.; Gigli, G.; Fanti, R.; Moretti, S.; Basile, G.; Casagli, N. Integration between ground based and satellite SAR data in landslide mapping: The San Fratello case study. Geomorphology 2014, 223, 45–60. [Google Scholar] [CrossRef]
- Casagli, N.; Frodella, W.; Morelli, S.; Tofani, V.; Ciampalini, A.; Intrieri, E.; Raspini, F.; Rossi, G.; Tanteri, L.; Lu, P. Spaceborne, UAV and ground-based remote sensing techniques for landslide mapping, monitoring and early warning. Geoenviron. Disasters 2017, 4, 9. [Google Scholar] [CrossRef]
- Crosetto, M.; Monserrat, O.; Cuevas-González, M.; Devanthéry, N.; Crippa, B. Persistent scatterer interferometry: A review. ISPRS J. Photogramm. Remote Sens. 2016, 115, 78–89. [Google Scholar] [CrossRef]
- Costantini, M.; Ferretti, A.; Minati, F.; Falco, S.; Trillo, F.; Colombo, D.; Novali, F.; Malvarosa, F.; Mammone, C.; Vecchioli, F.; et al. Analysis of surface deformations over the whole Italian territory by interferometric processing of ERS, Envisat and COSMO-SkyMed radar data. Remote Sens. Environ. 2017, 202, 250–275. [Google Scholar] [CrossRef]
- Costantini, M.; Falco, S.; Malvarosa, F.; Minati, F. A New Method for Identification and Analysis of Persistent Scatterers in Series of SAR Images. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 7–11 July 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A new algorithm for processing interferometric data-stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- De Zan, F.; Guarnieri, A.M. TOPSAR: Terrain observation by progressive scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Colesanti, C.; Ferretti, A.; Locatelli, R.; Novali, F.; Savio, G. Permanent Scatterers: Precision Assessment and Multi-Platform Analysis. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Toulouse, France, 21–25 July 2003; IEEE: Piscataway, NJ, USA, 2003. [Google Scholar]
- Tofani, V.; Raspini, F.; Catani, F.; Casagli, N. Persistent Scatterer Interferometry (PSI) technique for landslide characterization and monitoring. Remote Sens. 2013, 5, 1045–1065. [Google Scholar] [CrossRef]
- Carlà, T.; Tofani, V.; Lombardi, L.; Raspini, F.; Bianchini, S.; Bertolo, D.; Thuegaz, P.; Casagli, N. Combination of GNSS, satellite InSAR, and GBInSAR remote sensing monitoring to improve the understanding of a large landslide in high alpine environment. Geomorphology 2019, 335, 62–75. [Google Scholar] [CrossRef]
- Handwerger, A.L.; Roering, J.J.; Schmidt, D.A.; Rempel, A.W. Kinematics of earthflows in the Northern California Coast Ranges using satellite interferometry. Geomorphology 2015, 246, 321–333. [Google Scholar] [CrossRef]
- Carlà, T.; Macciotta, R.; Hendry, M.; Martin, D.; Edwards, T.; Evans, T.; Farina, P.; Intrieri, E.; Casagli, N. Displacement of a landslide retaining wall and application of an enhanced failure forecasting approach. Landslides 2018, 15, 489–505. [Google Scholar] [CrossRef]
- CARG. Regione Liguria-Carta Geologica Regionale sc. 1:25000-tav. 215.4-S. Stefano D’Aveto. 2006. Available online: http://www.cartografia.regione.liguria.it/templateFogliaRC.asp?itemID=30208&level=3&label=INFORMAZIONI%20GEOSCIENTIFICHE (accessed on 30 August 2019).
- Tofani, V.; Del Ventisette, C.; Moretti, S.; Casagli, N. Integration of remote sensing techniques for intensity zonation within a landslide area: A case study in the northern Apennines, Italy. Remote Sens. 2014, 6, 907–924. [Google Scholar] [CrossRef]
- Cotecchia, V. The Second Hans Cloos Lecture. Experience drawn from the great Ancona landslide of 1982. Bull. Eng. Geol. Environ. 2006, 65, 1–41. [Google Scholar] [CrossRef]
- Agostini, A.; Tofani, V.; Nolesini, T.; Gigli, G.; Tanteri, L.; Rosi, A.; Cardellini, S.; Casagli, N. A new appraisal of the Ancona landslide based on geotechnical investigations and stability modelling. Quart. J Eng. Geol. Hydrogeol. 2014, 47, 29–43. [Google Scholar] [CrossRef]
- Cello, G.; Tondi, E. Note Illustrative Della Carta Geologica d’Italia Alla Scala 1:50.000, Foglio 282 Ancona; SELCA: Florence, Italy, 2013. [Google Scholar]
- Stucchi, E.; Mazzotti, A. 2D seismic exploration of the Ancona landslide (Adriatic Coast, Italy). Geophysics 2009, 74, B139–B151. [Google Scholar] [CrossRef]
- Crescenti, U.; Calista, M.; Mangifesta, M.; Sciarra, N. The Ancona landslide of December 1982. G. Geol. Appl. 2005, 1, 53–62. [Google Scholar]
- Atzeni, C.; Barla, M.; Pieraccini, M.; Antolini, F. Early warning monitoring of natural and engineered slopes with ground-based synthetic-aperture radar. Rock Mech. Rock Eng. 2015, 48, 235–246. [Google Scholar] [CrossRef]
- Fugenschuh, B.; Loprieno, A.; Ceriani, S.; Schmid, S. Structural analysis of the Subbriançonais and Valais Units in the area of Moûtiers (Savoy, Western Alps) paleogeographic and tectonic consequences. Int. J. Earth Sci. 1999, 8, 201–218. [Google Scholar]
- Barla, G.; Antolini, F.; Barla, M.; Mensi, E.; Piovano, G. Monitoring of the Beauregard landslide (Aosta Valley, Italy) using advanced and conventional techniques. Eng. Geol. 2010, 116, 218–235. [Google Scholar] [CrossRef]
- Kalenchuk, K.S.; Hutchinson, D.J.; Diederichs, M.S.; Barla, G.; Barla, M.; Piovano, G. Three-Dimensional Mixed Continuum-Discontinuum Numerical Simulation of the Beauregard Landslide. In Proceedings of the ISRM International Symposium-EUROC, Lausanne, Switzerland, 15–16 June 2010; International Society for Rock Mechanics and Rock Engineering: Lisbon, Portugal, 2010. [Google Scholar]
- Barla, G. Numerical modeling of deep-seated landslides interacting with man-made structures. J. Rock Mech. Geotech. Eng. 2018, 10, 1020–1036. [Google Scholar] [CrossRef]
- Martini, I.P.; Sagri, M. Tectono-sedimentary characteristics of Late Miocene-Quaternary extensional basin of Northern Apennines, Italy. Earth Sci. Rev. 1993, 34, 197–233. [Google Scholar] [CrossRef]
- Fidolini, F.; Ghinassi, M.; Magi, M.; Papini, M.; Sagri, M. The Plio-Pleistocene fluvio-lacustrine Upper Valdarno Basin (central Italy): Stratigraphy and basin fill evolution. Ital. J. Geosci. 2013, 132, 13–32. [Google Scholar]
- Ghibaudo, G. Deep-sea fan deposits in the Macigno Formation (middle-upper Oligocene) of the Gordana Valley, northern Apennines, Italy. J. Sediment. Res. 1980, 50, 723–741. [Google Scholar] [CrossRef]
- Ielpi, A. Geological map of the Santa Barbara Basin (Northern Apennines, Italy). J. Maps 2011, 7, 614–625. [Google Scholar] [CrossRef]
- Hu, X.; Bürgmann, R.; Lu, Z.; Handwerger, A.L.; Wang, T.; Miao, R. Mobility, thickness, and hydraulic diffusivity of the slow-moving Monroe landslide in California revealed by L-band satellite radar interferometry. J. Geophys. Res. Solid Earth 2019, 124, 7504–7518. [Google Scholar] [CrossRef]















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Intrieri, E.; Frodella, W.; Raspini, F.; Bardi, F.; Tofani, V. Using Satellite Interferometry to Infer Landslide Sliding Surface Depth and Geometry. Remote Sens. 2020, 12, 1462. https://doi.org/10.3390/rs12091462
Intrieri E, Frodella W, Raspini F, Bardi F, Tofani V. Using Satellite Interferometry to Infer Landslide Sliding Surface Depth and Geometry. Remote Sensing. 2020; 12(9):1462. https://doi.org/10.3390/rs12091462
Chicago/Turabian StyleIntrieri, Emanuele, William Frodella, Federico Raspini, Federica Bardi, and Veronica Tofani. 2020. "Using Satellite Interferometry to Infer Landslide Sliding Surface Depth and Geometry" Remote Sensing 12, no. 9: 1462. https://doi.org/10.3390/rs12091462
APA StyleIntrieri, E., Frodella, W., Raspini, F., Bardi, F., & Tofani, V. (2020). Using Satellite Interferometry to Infer Landslide Sliding Surface Depth and Geometry. Remote Sensing, 12(9), 1462. https://doi.org/10.3390/rs12091462