Wave Signatures in Total Electron Content Variations: Filtering Problems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
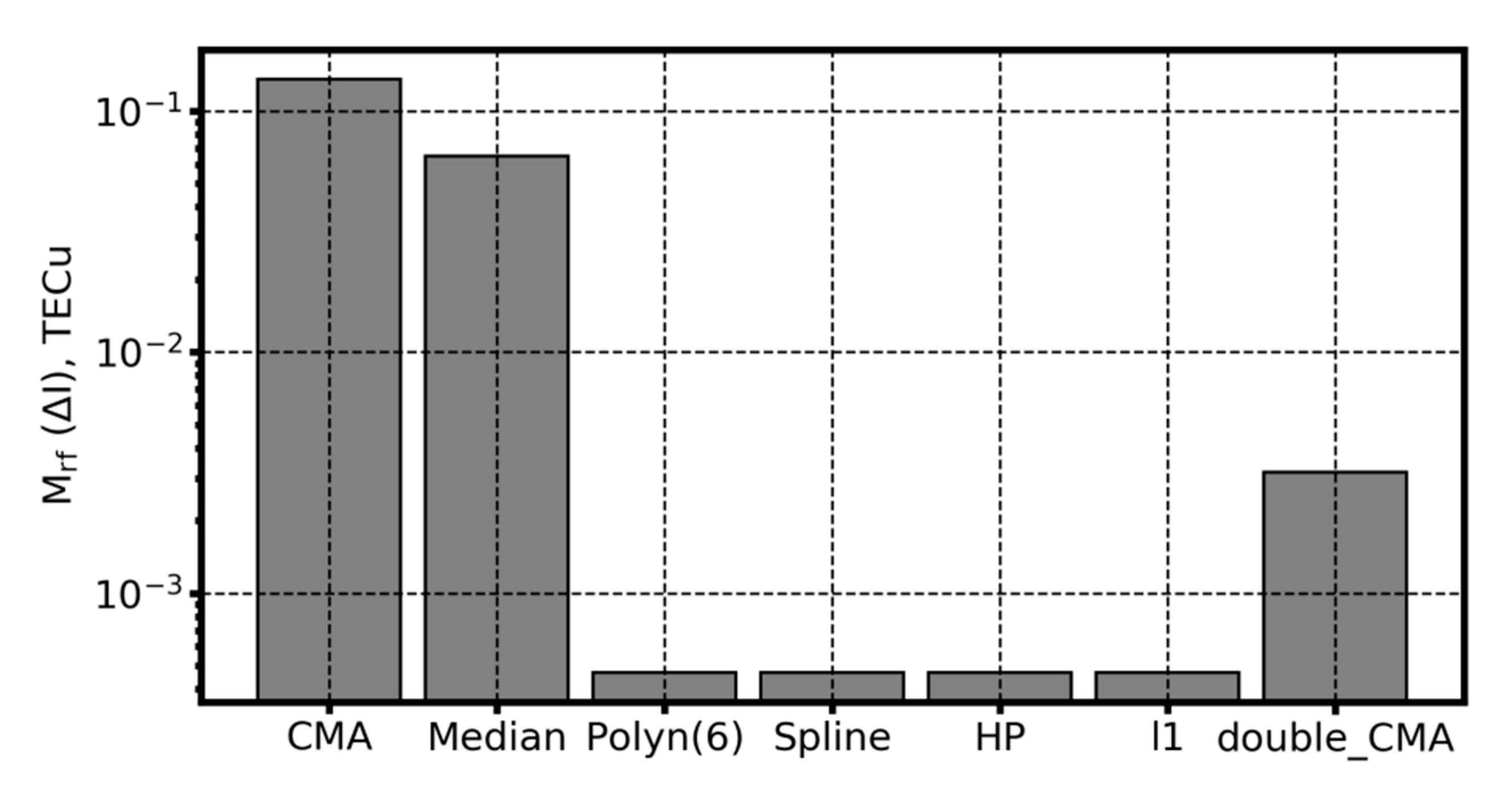
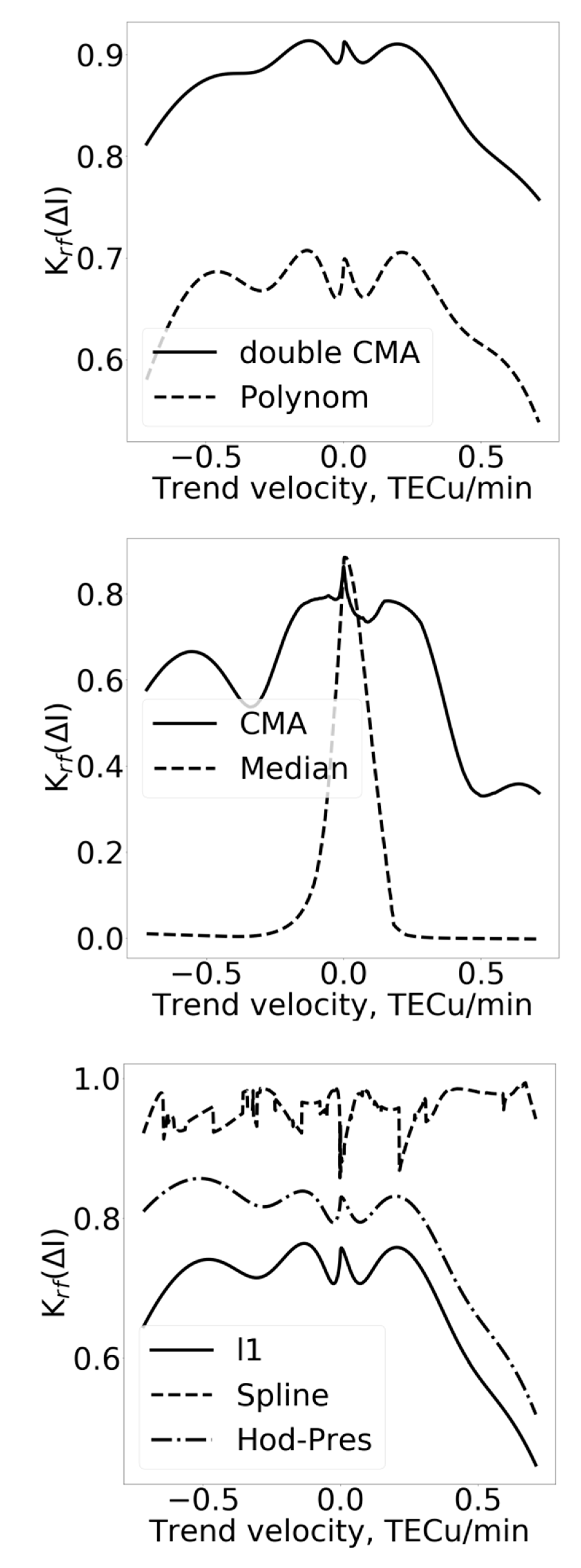
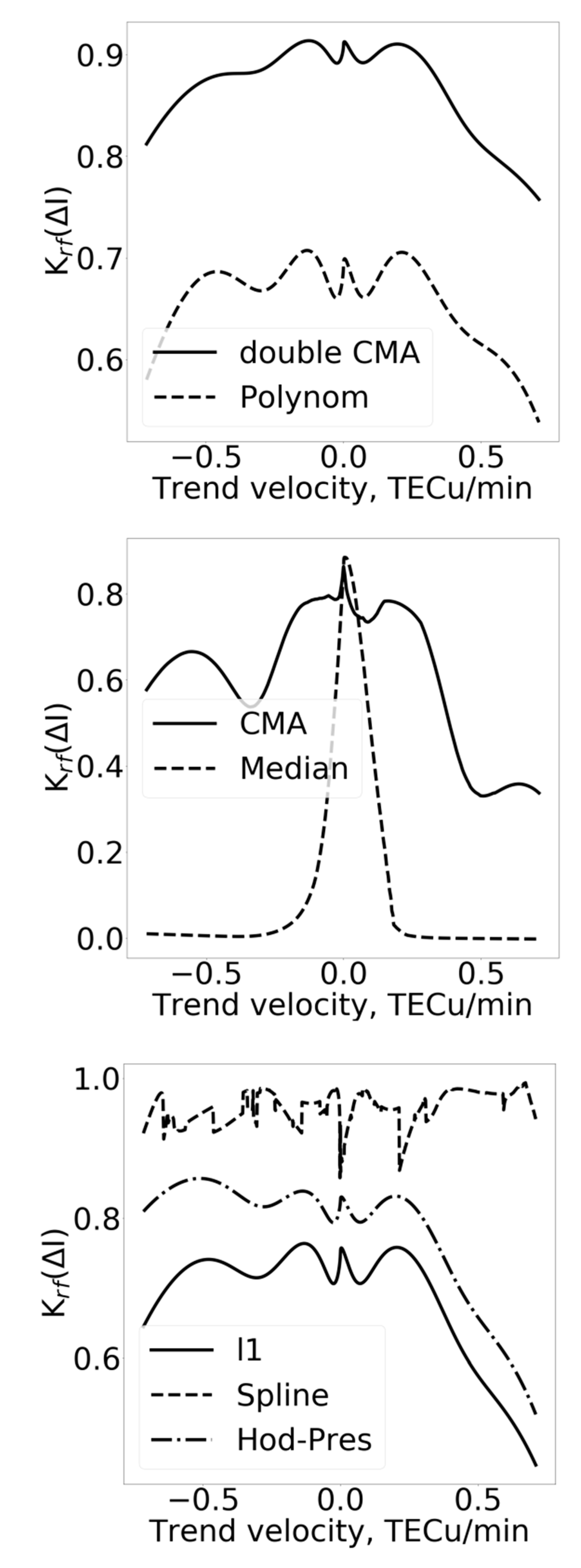
- Centered moving average (CMA).
- Centered moving median (Median).
- 6th-order polynomial (Polynom).
- Hodrick–Prescott Filter (Hod-Pres). The input data for this filter is λ, which determines trend flattening. This value should be selected as the fourth degree for the rate of the frequency change in the signal that should be obtained upon detrending [17]. In our case, λ = ~129,600.
- L1 Filter (l1). The input data for this filter is λ, which defines trend smoothing. We have never found explicit instructions for how to determine this frequency-dependent parameter. Therefore, its value (λ = 0,5) was found by modeling.
- Cubic smoothing spline (Spline). The smoothing spline input parameter is Smoothing Factor, which determines trend smoothing. The Smoothing Factor value (8) was found empirically.
- Double use of the centered moving average (Double CMA).
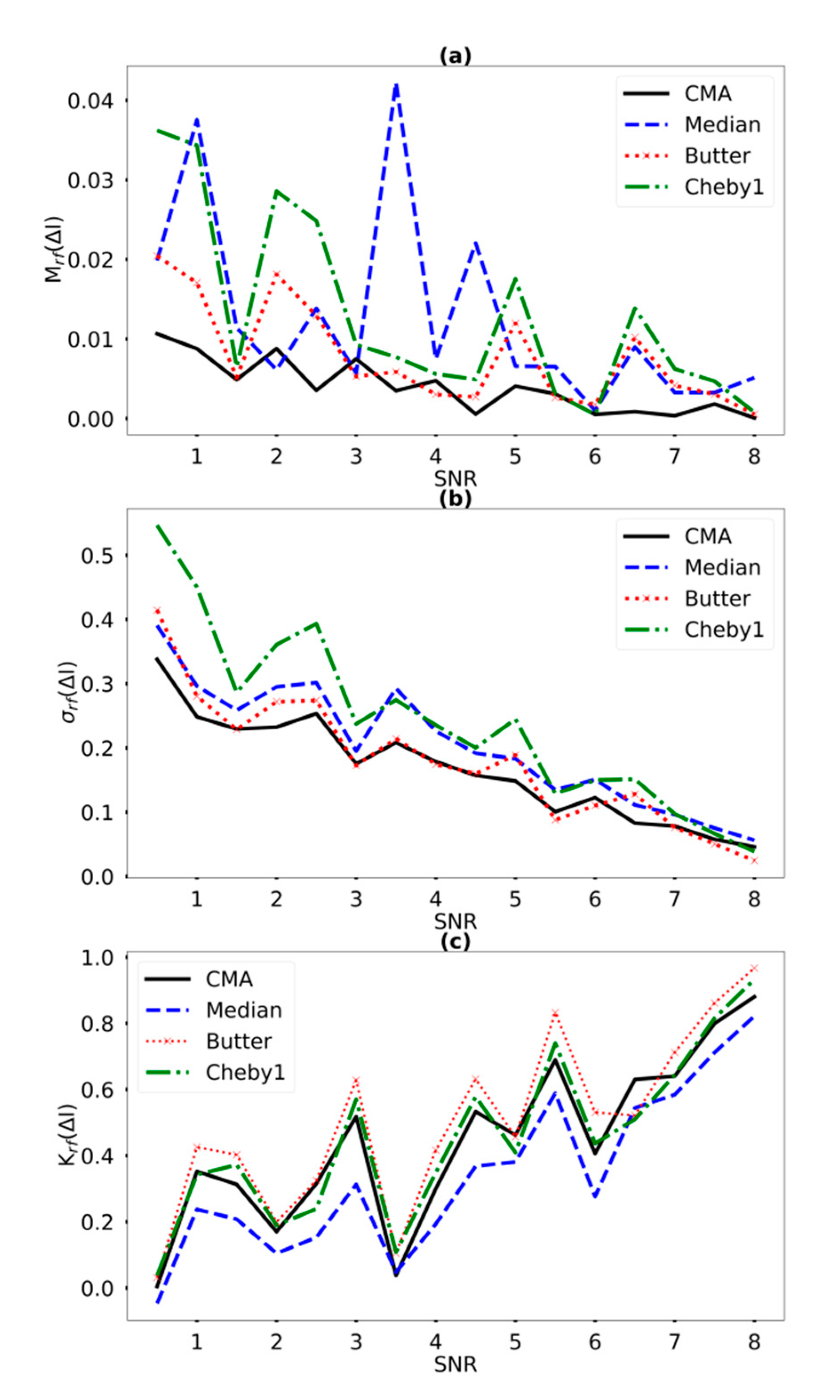
- Centered moving average (CMA).
- Centered moving median (Median).
- Butterworth filter of 8th order (Butter).
- Type I Chebyshev filter of 8th order (ChebyI).
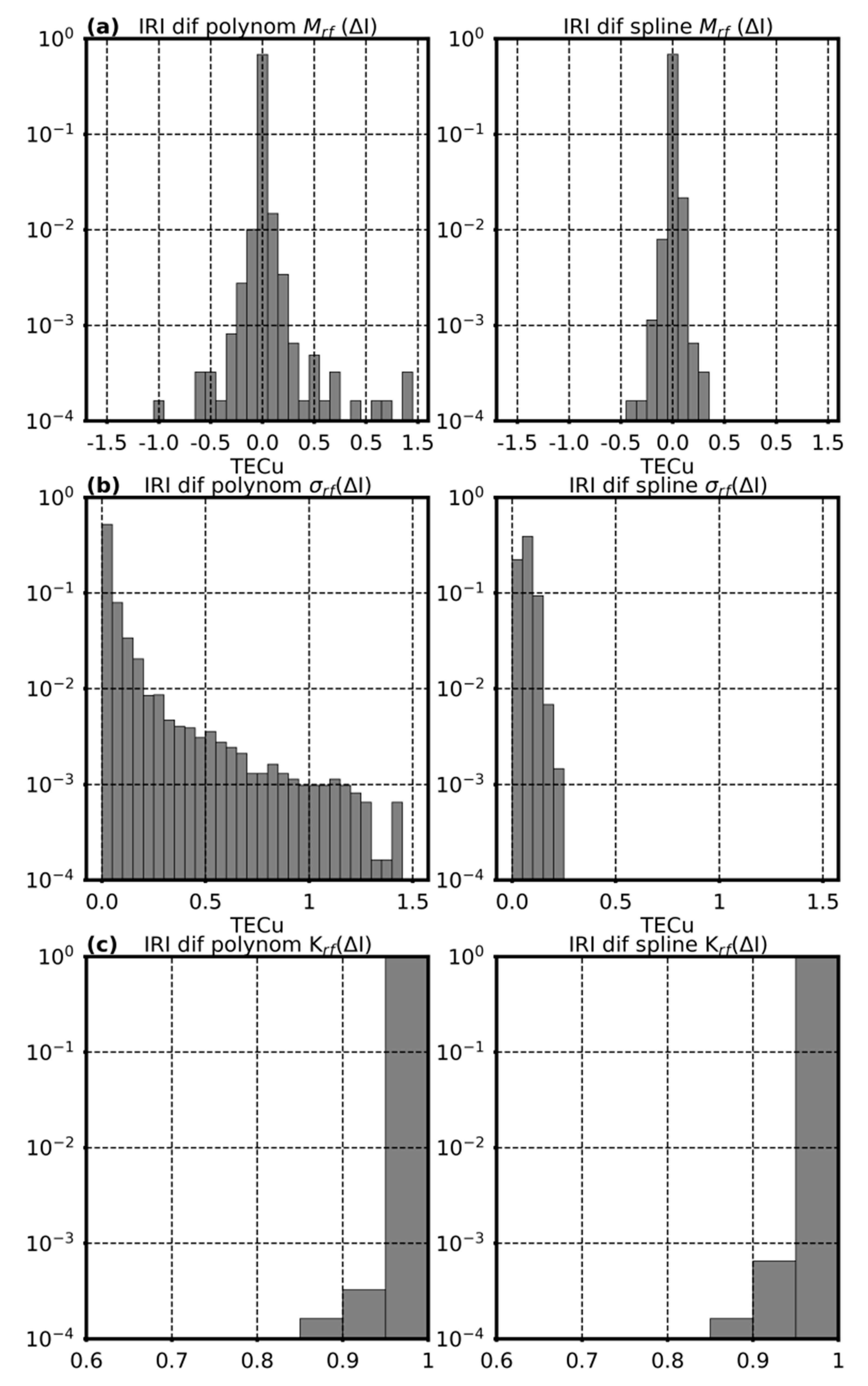
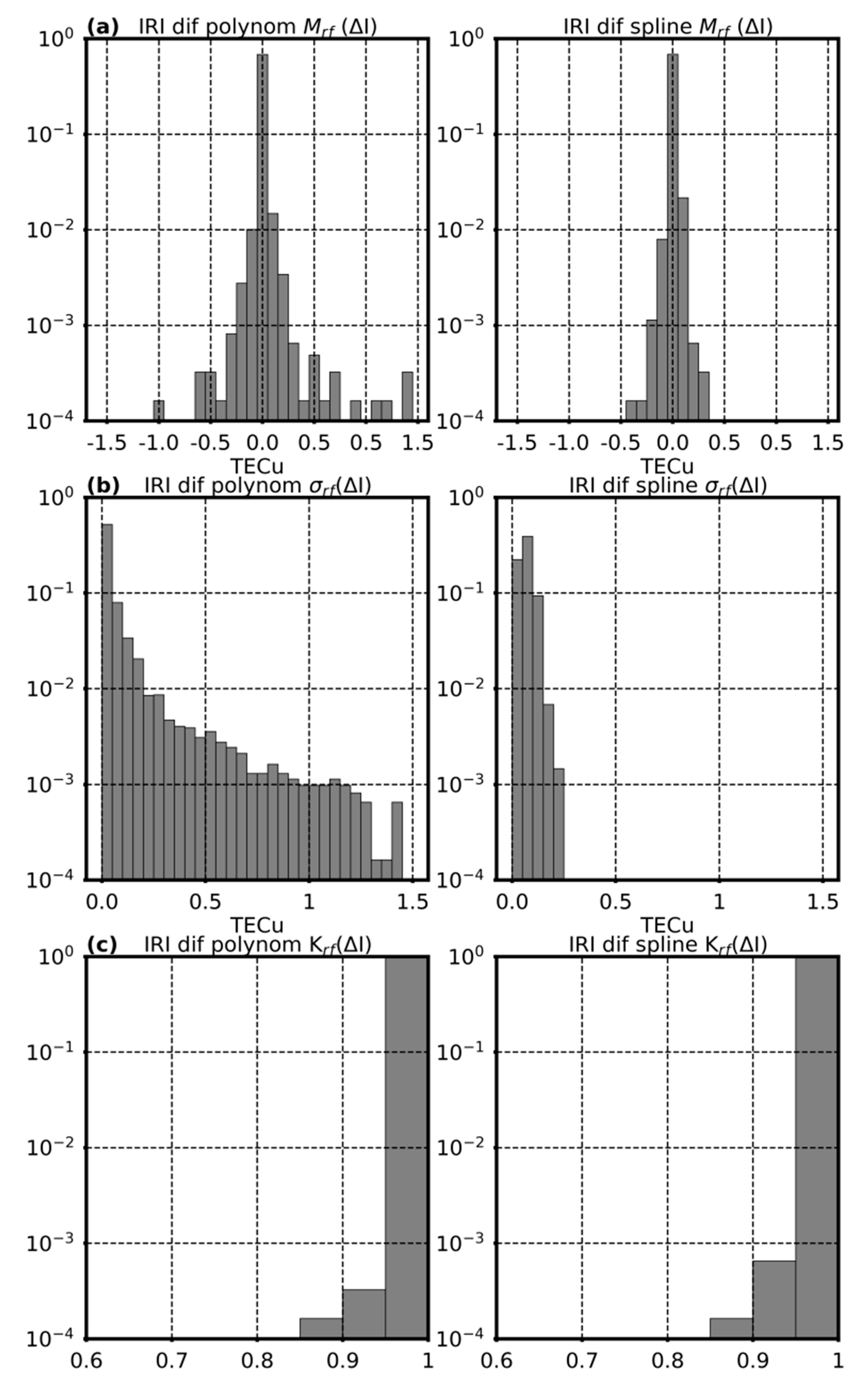
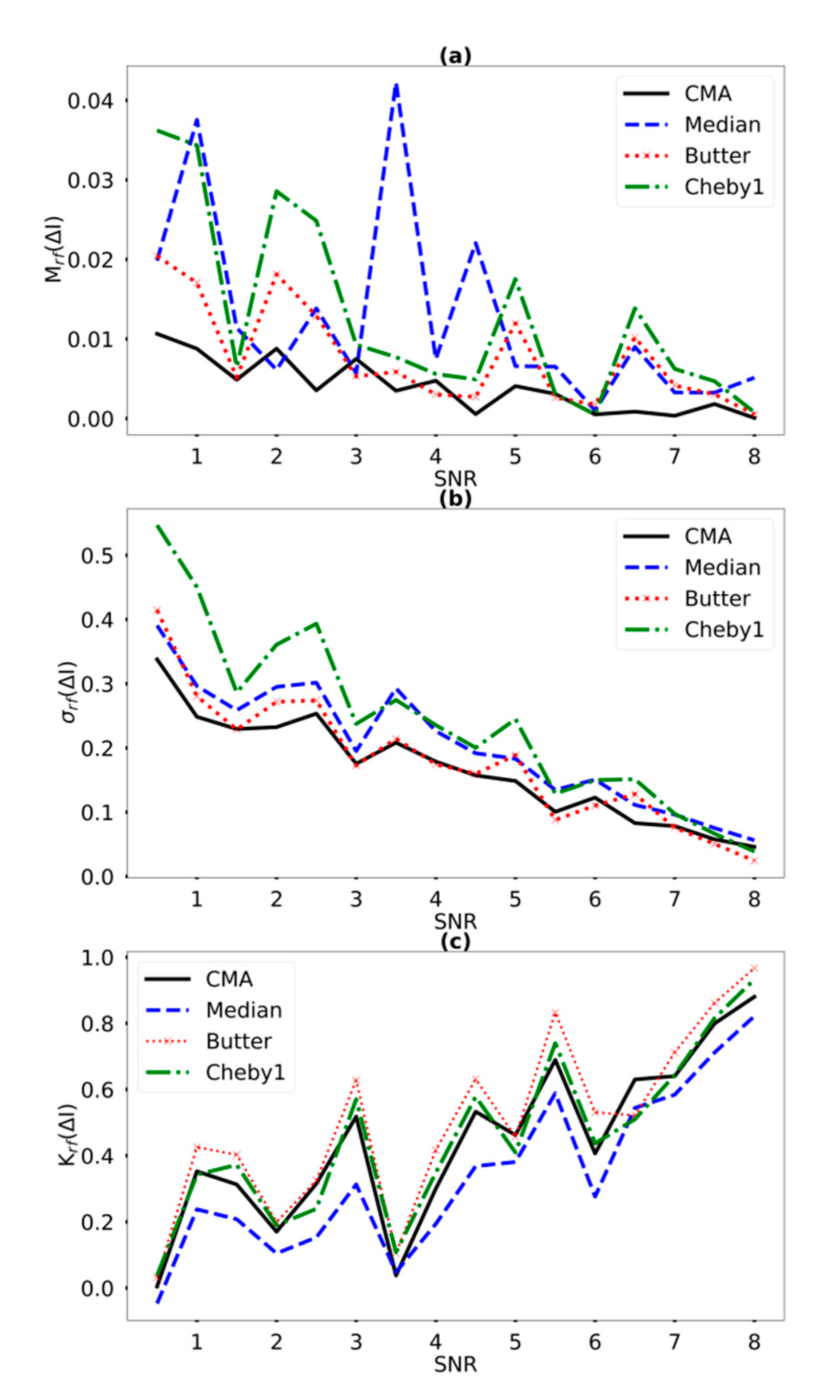
- Mean bias error (MBE) MRF:where IR, IF are the reference signal and the signal obtained upon implementing procedures; N is the number of data points.
- Root-mean-square error (RMSE) σ, i.e., the standard deviation of the residuals between the modeled and the recovered signals:
- Correlation coefficient K between the known used signal IR and the recovered signal IF upon implementing filtering/detrending procedures:
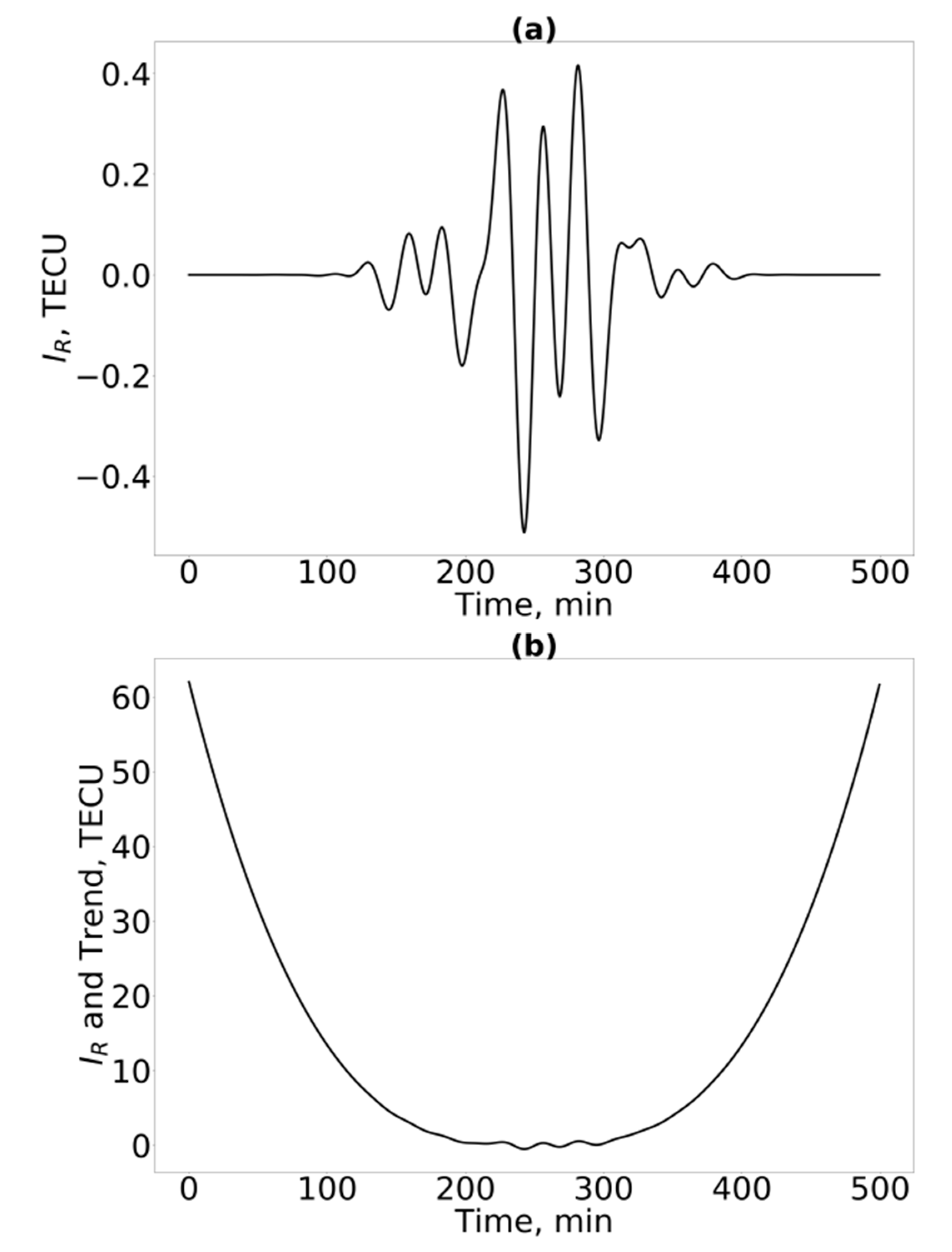
3. Modeling Results
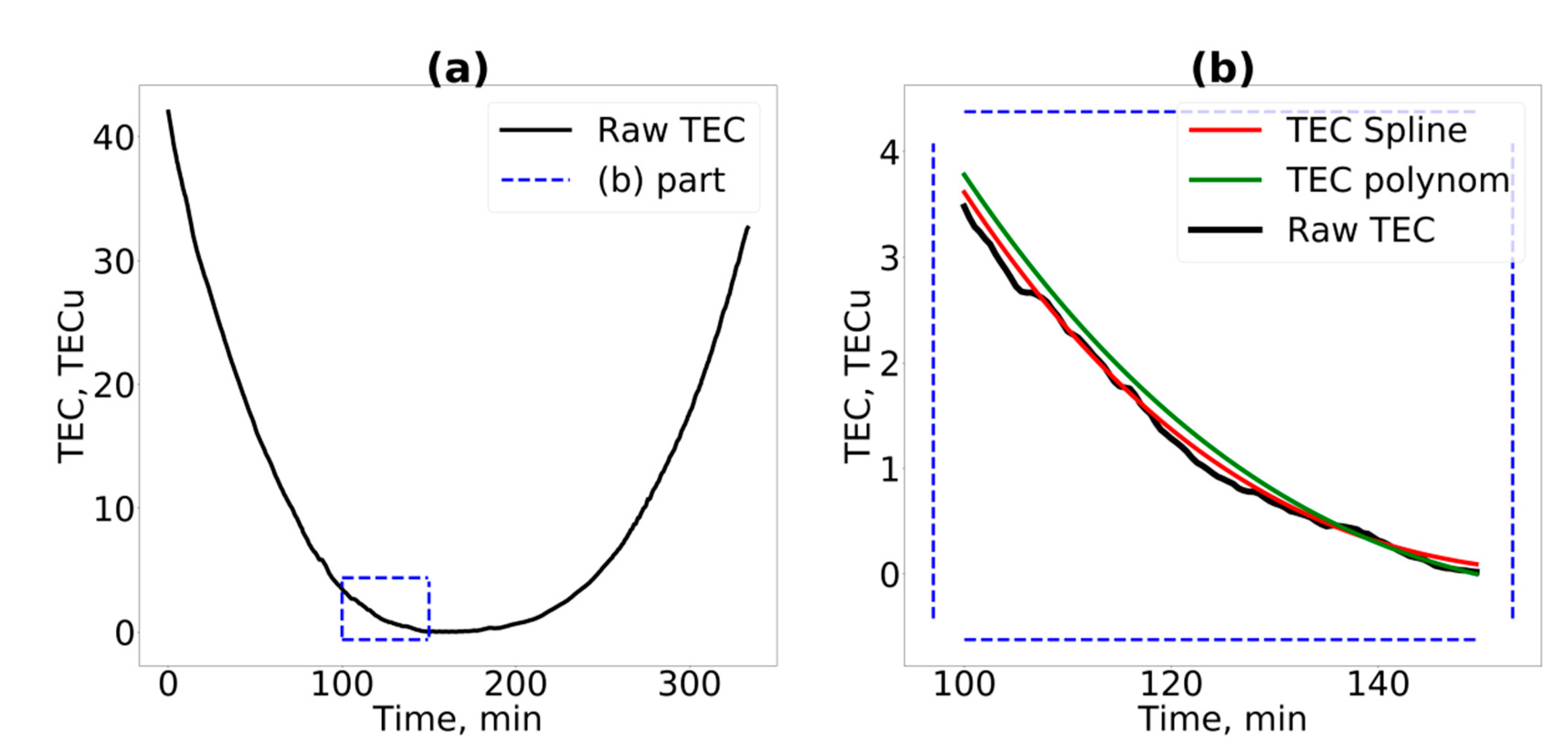
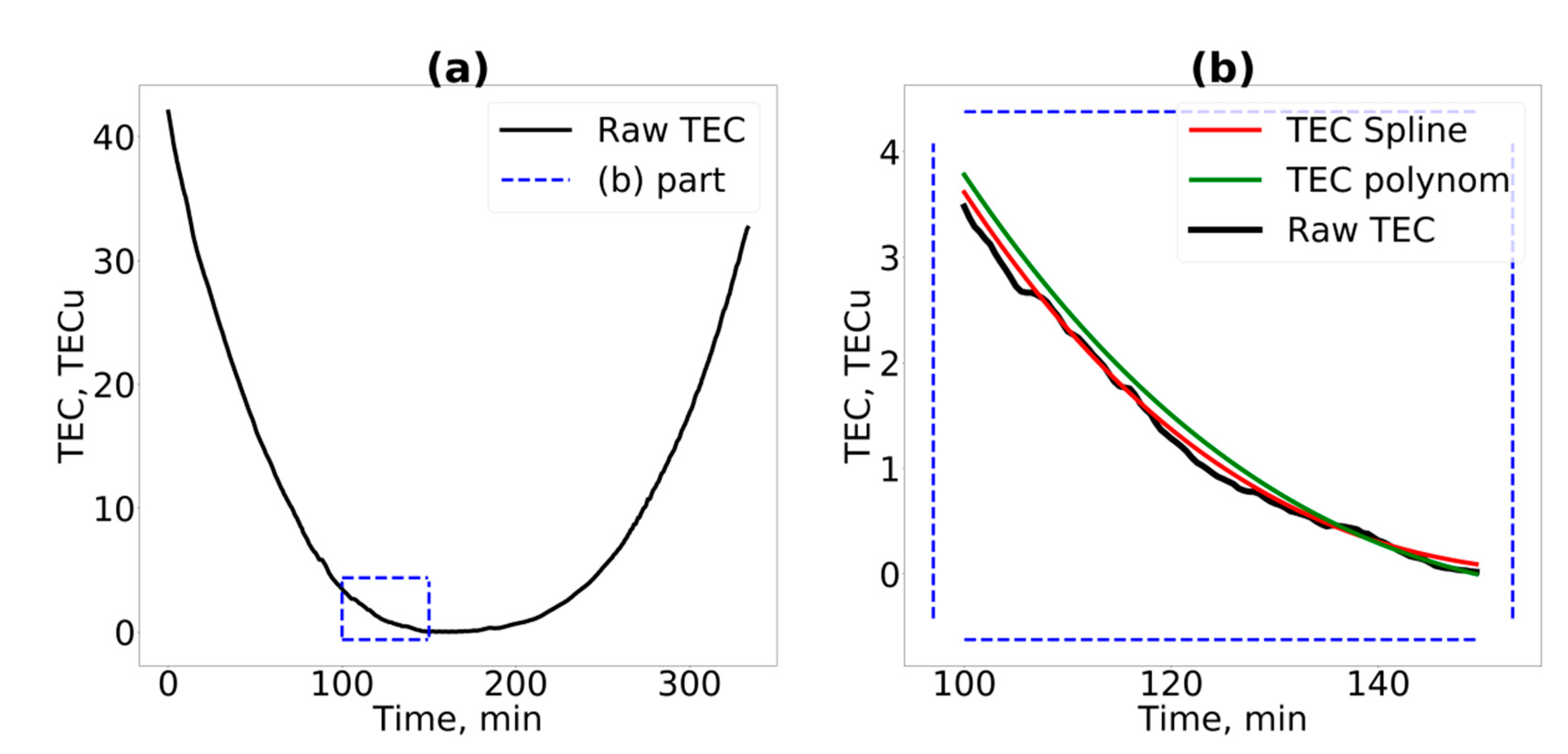
3.1. Detrending
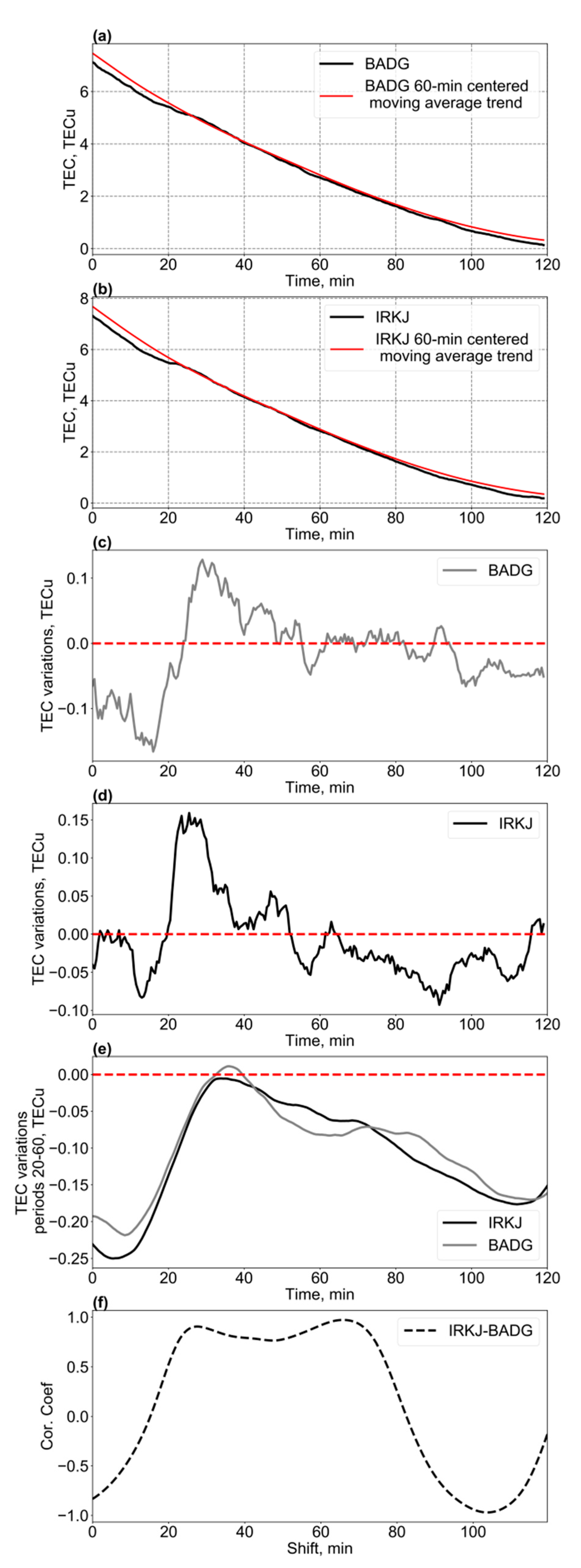
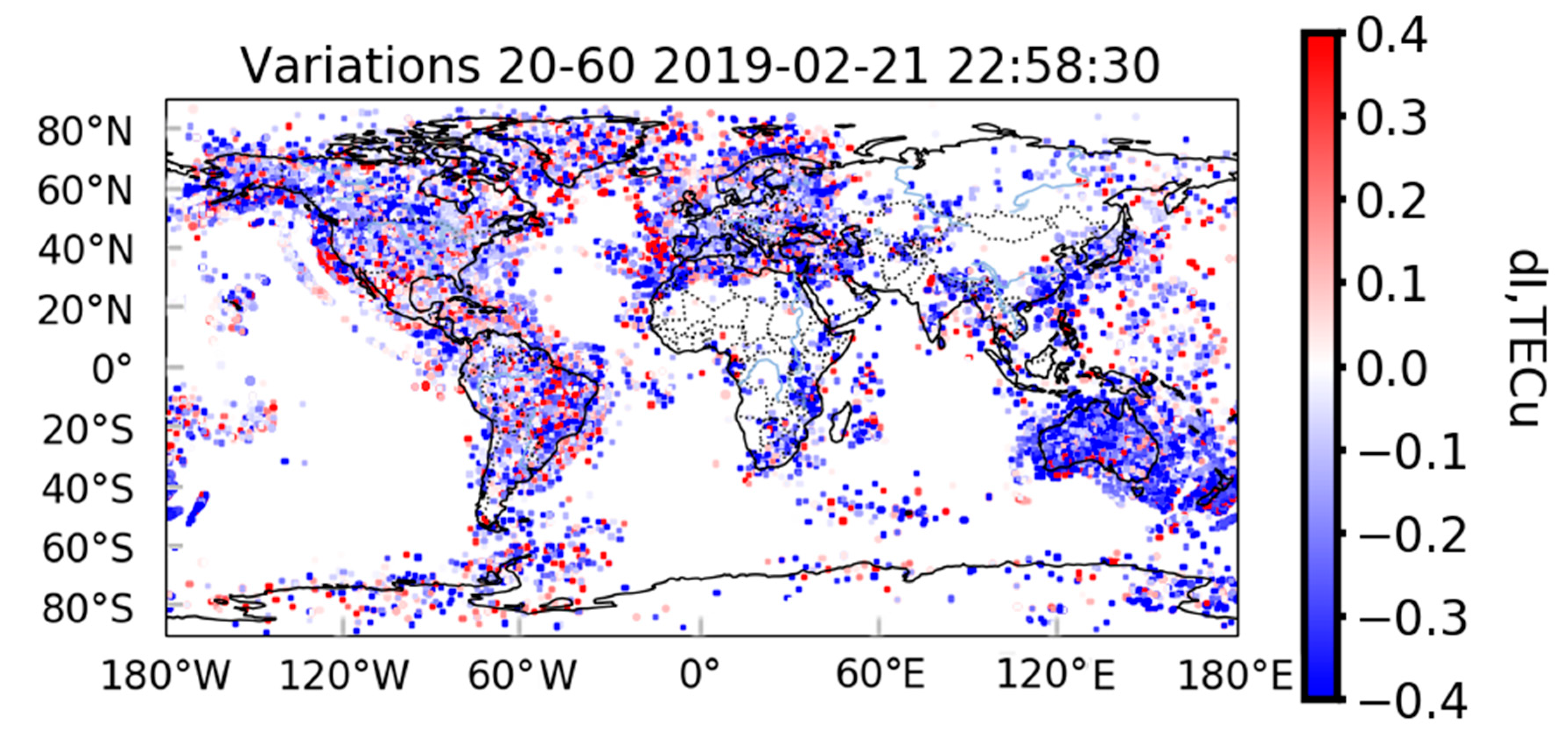
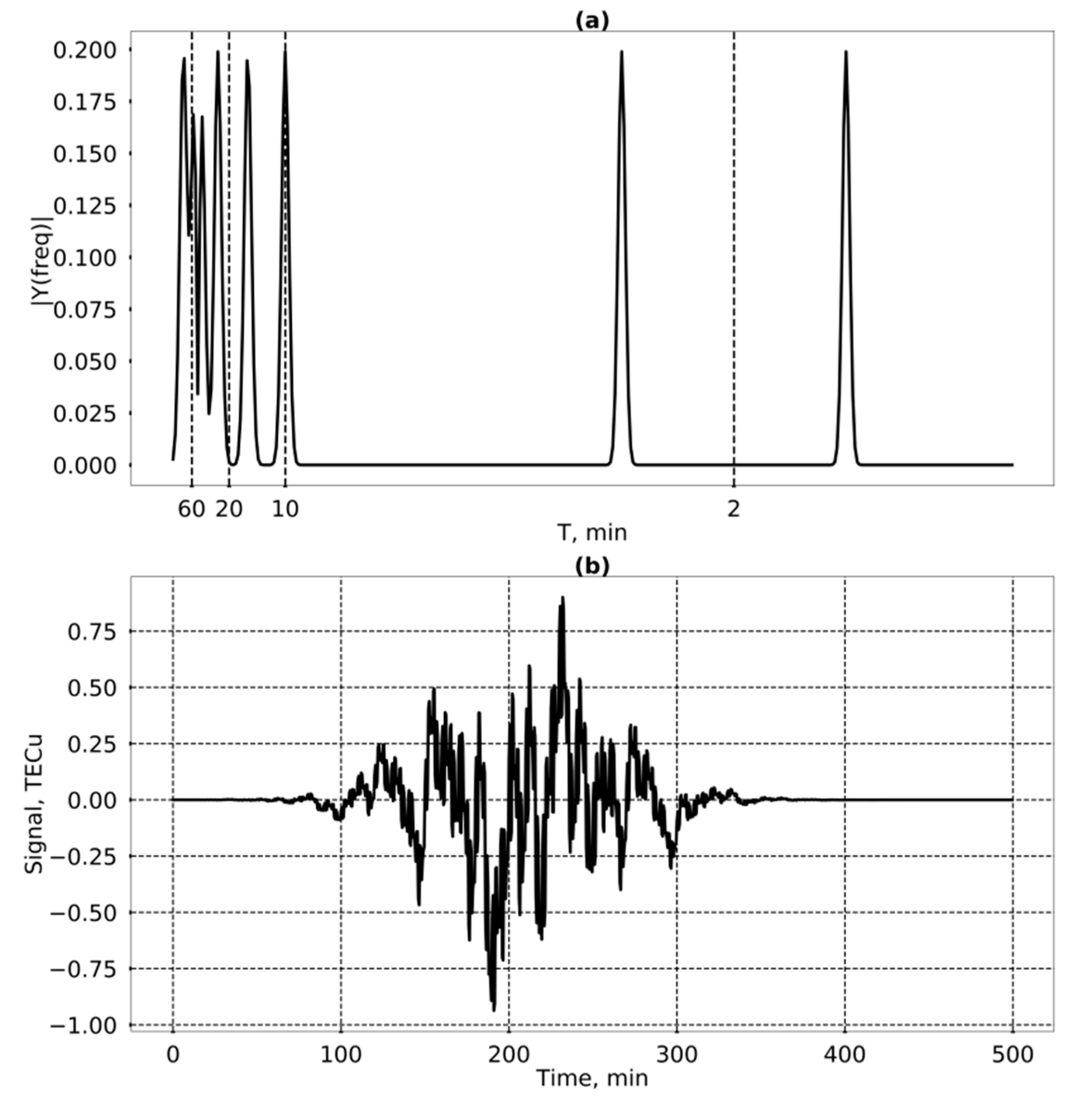
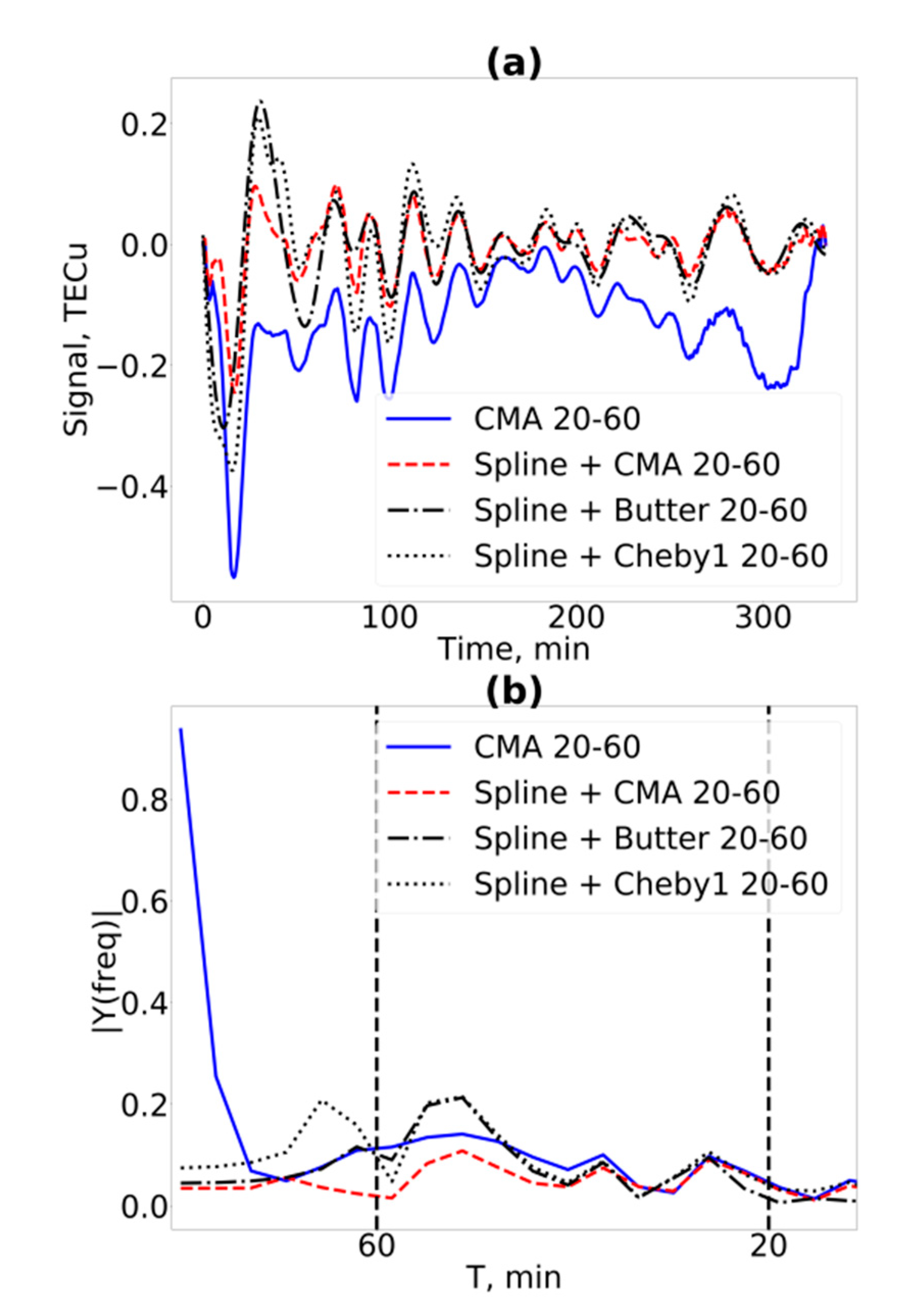
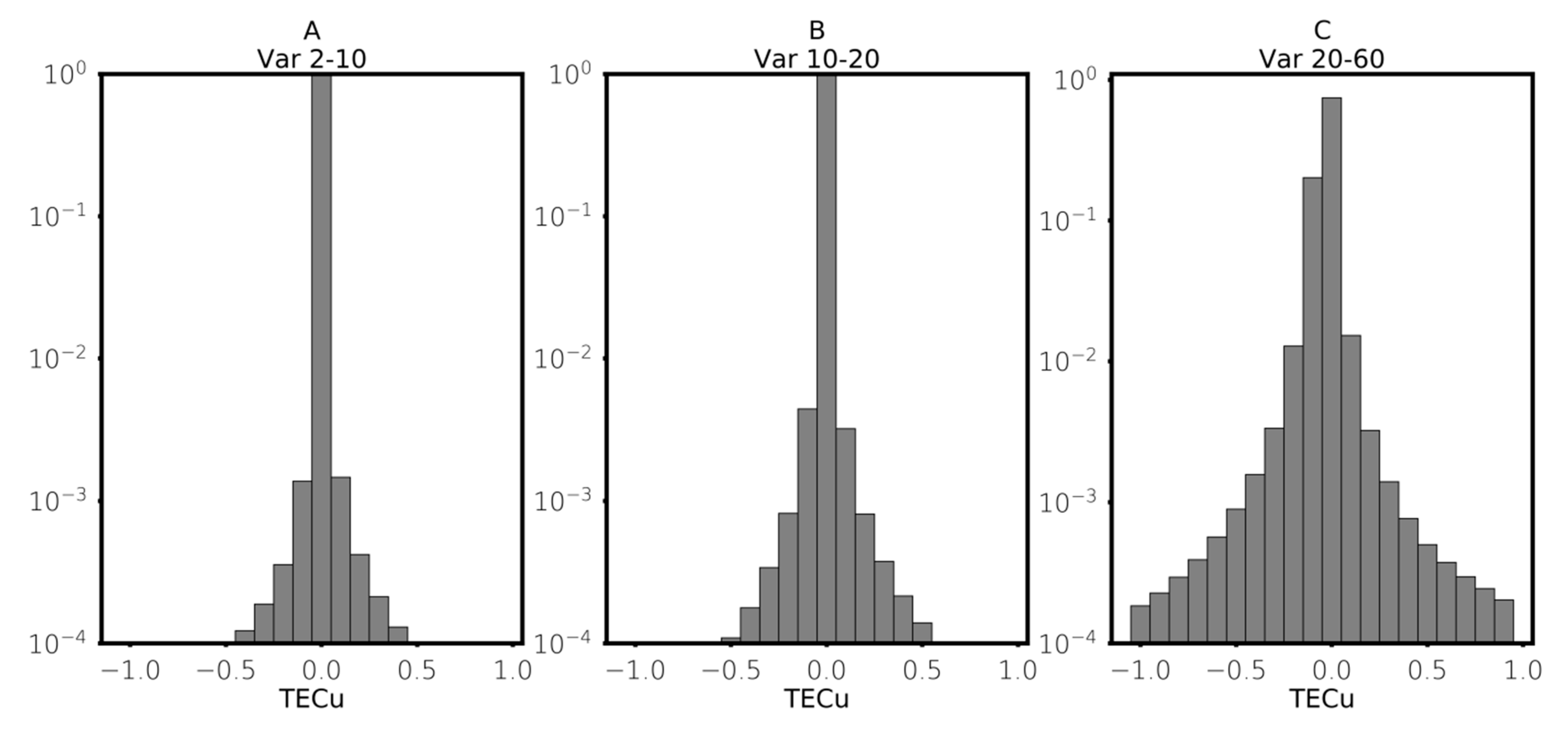
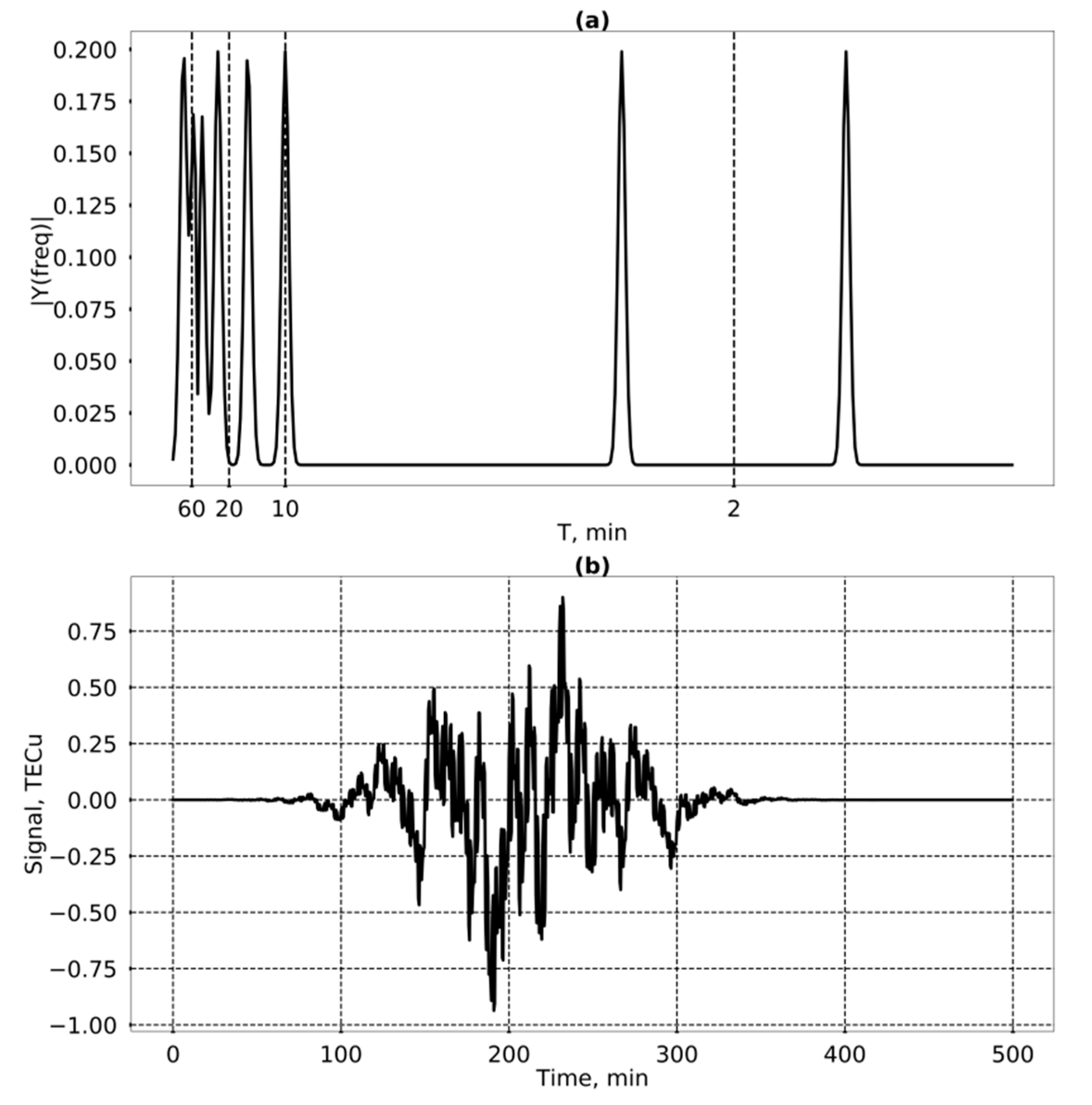
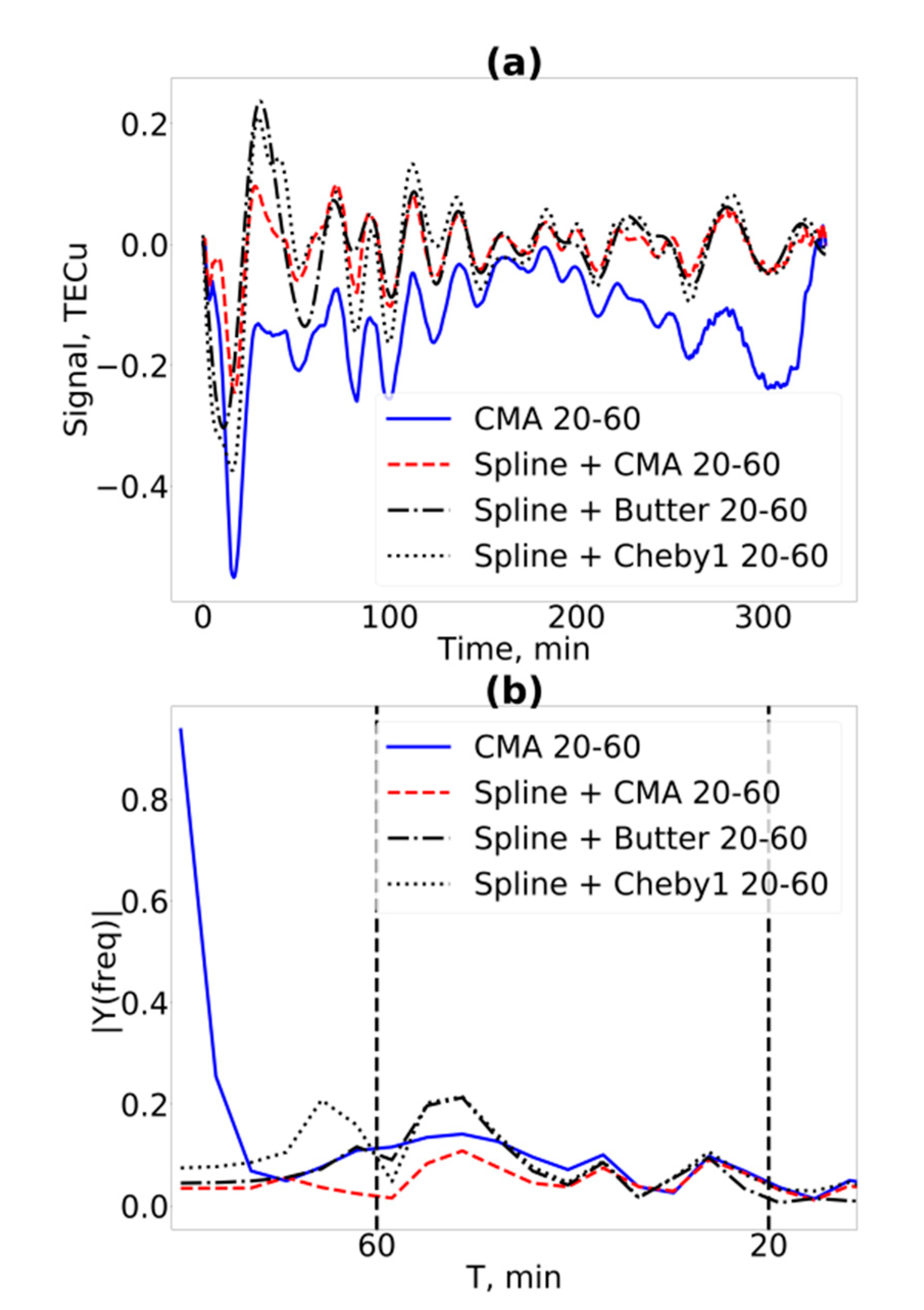
3.2. Variation Selection
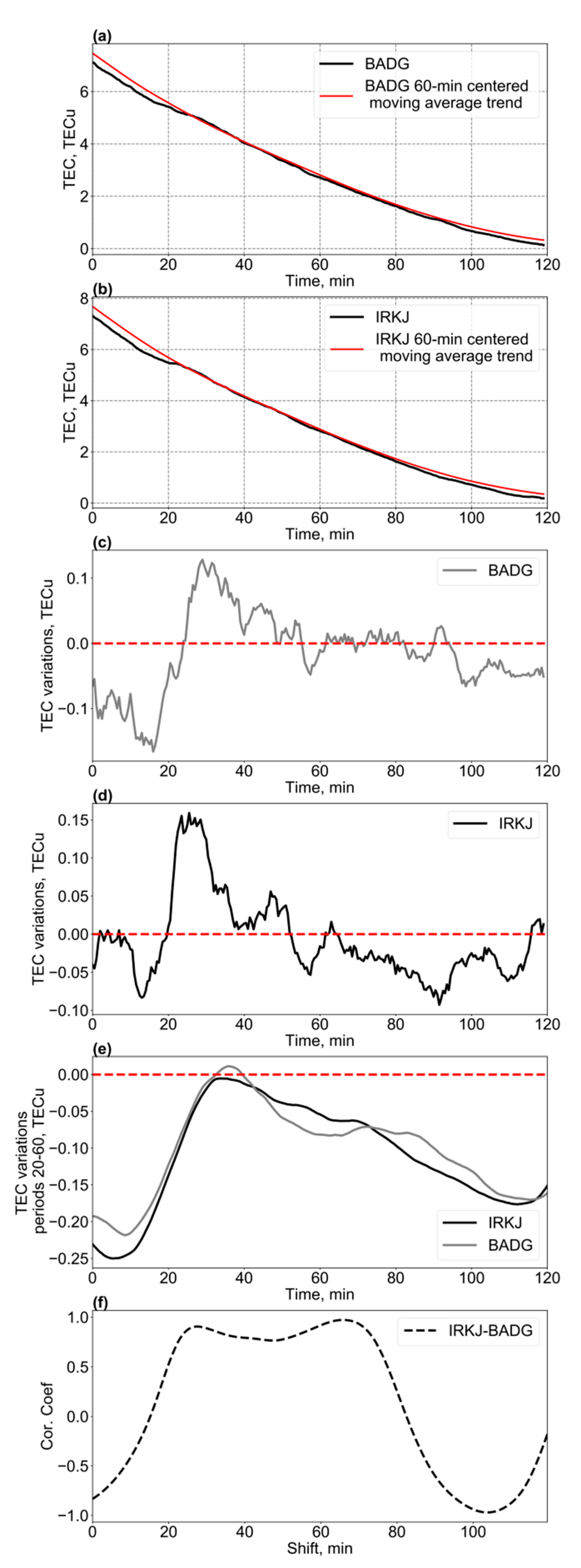
4. Experimental Results
5. Discussion
6. Conclusions
- The problem of the GNSS data filtering should be split into two subtasks (detrending and selection) to obtain the best results. At such an approach, the possibility to obtain artifacts related to the data processing algorithms is minimal.
- Results show that the longer periods, the higher errors can appear caused by insufficient detrending. For the detrending problem, the smoothing cubic spline provides the best results among the versions presented in this paper. It features the minimal value of the mean bias error and the root-mean-square error, as well as the maximal correlation coefficient. The 6th-order polynomial also produces good results and can be used for this task.
- For the filtering problem, the centered moving average filter showed the best results among the versions presented in this paper.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mendillo, M. Storms in the ionosphere: Patterns and processes for total electron content. Rev. Geophys. 2006, 44. [Google Scholar] [CrossRef]
- Kutiev, I.; Tsagouri, I.; Perrone, L.; Pancheva, D.; Mukhtarov, P.; Mikhailov, A.; Lastovicka, J.; Jakowski, N.; Buresova, D.; Andonov, B.; et al. Solar activity impact on the Earth’s upper atmosphere. J. Space Weather Space Clim. 2013, 3. [Google Scholar] [CrossRef] [Green Version]
- Afraimovich, E.L.; Astafyeva, E.I.; Demyanov, V.V.; Edemskiy, I.K.; Gavrilyuk, N.S.; Ishin, A.B.; Kosogorov, E.A.; Leonovich, L.A.; Lesyuta, O.S.; Perevalova, N.P.; et al. Review of GPS/GLONASS studies of the ionospheric response to natural and anthropogenic processes and phenomena. J. Space Weather Space Clim. 2013, 3. [Google Scholar] [CrossRef] [Green Version]
- Bergeot, N.; Chevalier, J.-M.; Bruyninx, C.; Pottiaux, E.; Aerts, W.; Baire, Q.; Legrand, J.; Defraigne, P.; Huang, W. Near real-time ionospheric monitoring over Europe at the Royal Observatory of Belgium using GNSS data. J. Space Weather Space Clim. 2014, 4. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Monte-Moreno, E.; Hernández-Pajares, M. Multi-TID detection and characterization in a dense Global Navigation Satellite System receiver network. J. Geophys. Res. Space Phys. 2017, 122, 9554–9575. [Google Scholar] [CrossRef]
- Tsugawa, T.; Nishioka, M.; Ishii, M.; Hozumi, K.; Saito, S.; Shinbori, A.; Otsuka, Y.; Saito, A.; Buhari, S.M.; Supnithi, P.; et al. Total electron content observations by dense regional and worldwide international networks of GNSS. JDR 2018, 13, 535–545. [Google Scholar] [CrossRef]
- Zhou, Y.; Yang, J.; Zhu, F.; Su, F.; Hu, L.; Zhai, W. Ionospheric disturbances associated with the 2015 M7.8 Nepal earthquake. Geod. Geodyn. 2017, 8, 221–228. [Google Scholar] [CrossRef]
- Heki, K.; Ping, J. Directivity and apparent velocity of the coseismic ionospheric disturbances observed with a dense GPS array. Earth Planet. Sci. Lett. 2015, 236, 845–855. [Google Scholar] [CrossRef] [Green Version]
- Galvan, D.A.; Komjathy, A.; Hickey, M.P.; Mannucci, A.J. The 2009 Samoa and 2010 Chile tsunamis as observed in the ionosphere using GPS total electron content. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef]
- Savastano, G.; Komjathy, A.; Verkhoglyadova, O.; Mazzoni, A.; Crespi, M.; Wei, Y.; Mannucci, A.J. Real-time detection of tsunami ionospheric disturbances with a stand-alone GNSS receiver: A preliminary feasibility demonstration. Sci. Rep. 2017, 7. [Google Scholar] [CrossRef]
- Komjathy, A.; Galvan, D.A.; Stephens, P.; Butala, M.D.; Akopian, V.; Wilson, B.; Verkhoglyadova, O.; Mannucci, A.J.; Hickey, M. Detecting ionospheric TEC perturbations caused by natural hazards using a global network of GPS receivers: The Tohoku case study. Earth Planets Space 2012, 64, 1287–1294. [Google Scholar] [CrossRef] [Green Version]
- Şentürk, E.; Livaoğlu, H.; Çepni, M.A. Comprehensive analysis of ionospheric anomalies before the Mw7·1 van earthquake on 23 October 2011. J. Navig. 2018, 72, 702–720. [Google Scholar] [CrossRef]
- Afraimovich, E.L.; Perevalova, N.P.; Plotnikov, A.V.; Uralov, A.M. The shock-acoustic waves generated by earthquakes. Ann. Geophys. 2001, 19, 395–409. [Google Scholar] [CrossRef] [Green Version]
- Afraimovich, E.L. The GPS global detection of the ionospheric response to solar flares. Radio Sci. 2000, 35, 1417–1424. [Google Scholar] [CrossRef]
- Yasyukevich, Y.V.; Kiselev, A.V.; Zhivetiev, I.V.; Edemskiy, I.K.; Syrovatskiy, S.V.; Maletckii, B.M.; Vesnin, A.M. SIMuRG: System for ionosphere monitoring and research from GNSS. GPS Solut. 2020. [Google Scholar] [CrossRef]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Ravn, M.; Uhlig, H. On adjusting the Hodrick–Prescott filter for the frequency of observations. Rev. Econ. Stat. 2002, 84, 371–376. [Google Scholar] [CrossRef] [Green Version]
- Bilitza, D.; Altadill, D.; Zhang, Y.; Mertens, C.; Truhlik, V.; Richards, P.; McKinnell, L.-A.; Reinisch, B. The International Reference Ionosphere 2012—A model of international collaboration. J. Space Weather Space Clim. 2014, 4, A07. [Google Scholar] [CrossRef]
- Yasyukevich, Y.V.; Vesnin, A.M.; Perevalova, N.P. SibNet—Siberian Global Navigation Satellite System Network: Current state. Sol. Terr. Phys. 2018, 4, 63–72. [Google Scholar] [CrossRef]
- Arce, G.R. Nonlinear Signal Processing: A Statistical Approach; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar] [CrossRef]
- Meyers, R.A. Mathematics of Complexity and Dynamical Systems; Springer: New York, NY, USA, 2011; ISBN 978-1-4614-1805-4. Available online: https://link.springer.com/referencework/10.1007%2F978-1-4614-1806-1 (accessed on 17 April 2020).
- Astafyeva, E. Effects of strong IMF Bz southward events on the equatorial and mid-latitude ionosphere. Ann. Geophys. 2009, 27, 1175–1187. [Google Scholar] [CrossRef] [Green Version]
- Podder, P.; Mehedi Hasan, M.; Rafiqul Islam, M.; Sayeed, M. Design and implementation of Butterworth, Chebyshev-I and elliptic filter for speech signal analysis. Int. J. Comput. Appl. 2014, 98, 12–18. [Google Scholar] [CrossRef]
- Smith, S.W. The Scientist and Engineer’s Guide to Digital Signal Processing, 2nd ed.; California Technical Publishing: San-Diego, CA, USA, 1999; p. 626. ISBN 0966017676. Available online: http://www.DSPguide.com. (accessed on 17 April 2020).
- Humphreys, T.E.; Psiaki, M.L.; Kintner, P.M. Modeling the effects of ionospheric scintillation on GPS carrier phase tracking. IEEE TAES 2010, 46, 1624–1637. [Google Scholar] [CrossRef]
- Thomson, R.E.; Emery, W.J. Chapter 6—Digital filters. In Data Analysis Methods in Physical Oceanography, 3rd ed.; Thomson, R.E., Emery, W.J., Eds.; Elsevier: Amsterdam, The Netherlands, 2014; pp. 593–637. ISBN 9780123877826. [Google Scholar] [CrossRef]
- Syrovatskiy, S.V.; Yasyukevich, Y.V.; Edemskiy, I.K.; Vesnin, A.M.; Voeykov, S.V.; Zhivetiev, I.V. Can we detect X/M/C-class solar flares from global navigation satellite system data? Results Phys. 2018, 12, 1004–1005. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; García-Rigo, A.; Juan, J.M.; Sanz, J.; Monte, E.; Aragón-Àngel, A. GNSS measurement of EUV photons flux rate during strong and mid solar flares. Space Weather 2012, 10, 1–16. [Google Scholar] [CrossRef] [Green Version]


© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maletckii, B.; Yasyukevich, Y.; Vesnin, A. Wave Signatures in Total Electron Content Variations: Filtering Problems. Remote Sens. 2020, 12, 1340. https://doi.org/10.3390/rs12081340
Maletckii B, Yasyukevich Y, Vesnin A. Wave Signatures in Total Electron Content Variations: Filtering Problems. Remote Sensing. 2020; 12(8):1340. https://doi.org/10.3390/rs12081340
Chicago/Turabian StyleMaletckii, Boris, Yury Yasyukevich, and Artem Vesnin. 2020. "Wave Signatures in Total Electron Content Variations: Filtering Problems" Remote Sensing 12, no. 8: 1340. https://doi.org/10.3390/rs12081340
APA StyleMaletckii, B., Yasyukevich, Y., & Vesnin, A. (2020). Wave Signatures in Total Electron Content Variations: Filtering Problems. Remote Sensing, 12(8), 1340. https://doi.org/10.3390/rs12081340