A New Passive Microwave Tool for Operational Forest Fires Detection: A Case Study of Siberia in 2019



Abstract
1. Introduction
- Advance detection of forest areas prone to fires;
- Early detection of a forest zone vulnerable to fire risk and its effective control.
- Knowledge of diagnostic parameters for identifying the boundaries and direction of the fire.
- Slowly changed variables such as population density, distance from industrial and human activity zones, tree and soil types, land use strategy, topography; and
- Rapidly changed variables such as air temperature, precipitation, pressure, wind characteristics and relative humidity.
2. Materials and Methods
2.1. Remote Sensing Platform
2.2. Detection System
- Regular environmental monitoring of Siberian forests and data accumulation in the on-board equipment;
- Developing the dynamic series for the element where FFOP is larger at a constant level (usually 0.5) to make a statistical decision about noise or signal character, and
- Detection and diagnosis of burned zones.
- Operational control of the regional water cycle, including evaluation of evapotranspiration of forest vegetation, based on current meteorological and geophysical data;
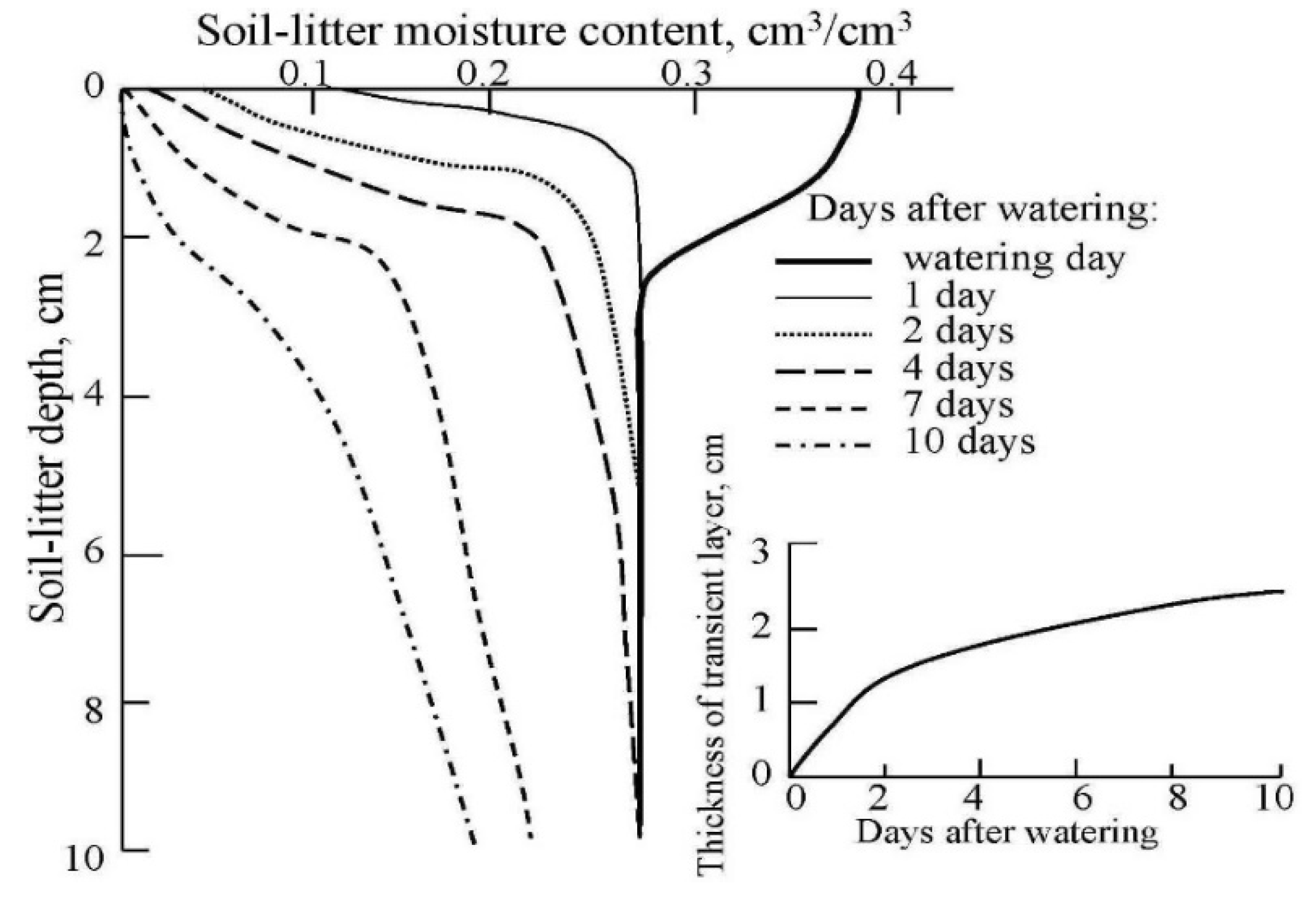
- Calculation of the spatial distribution of the regional parameters of the forest water balance, including the bulk water content of the forest canopy and the soil-litter;
- Detection of fire-prone zones based on the calculation of soil-litter moisture index; and
- Diagnosis of forest fire with fire distribution, zone burning and fire moving direction.
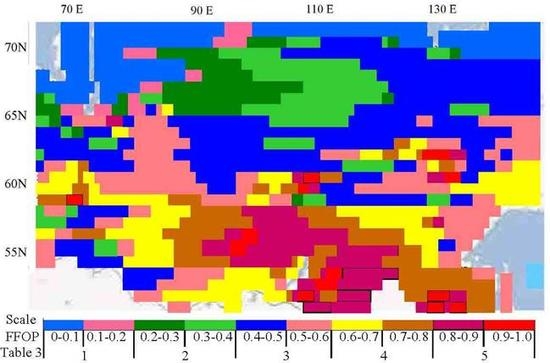
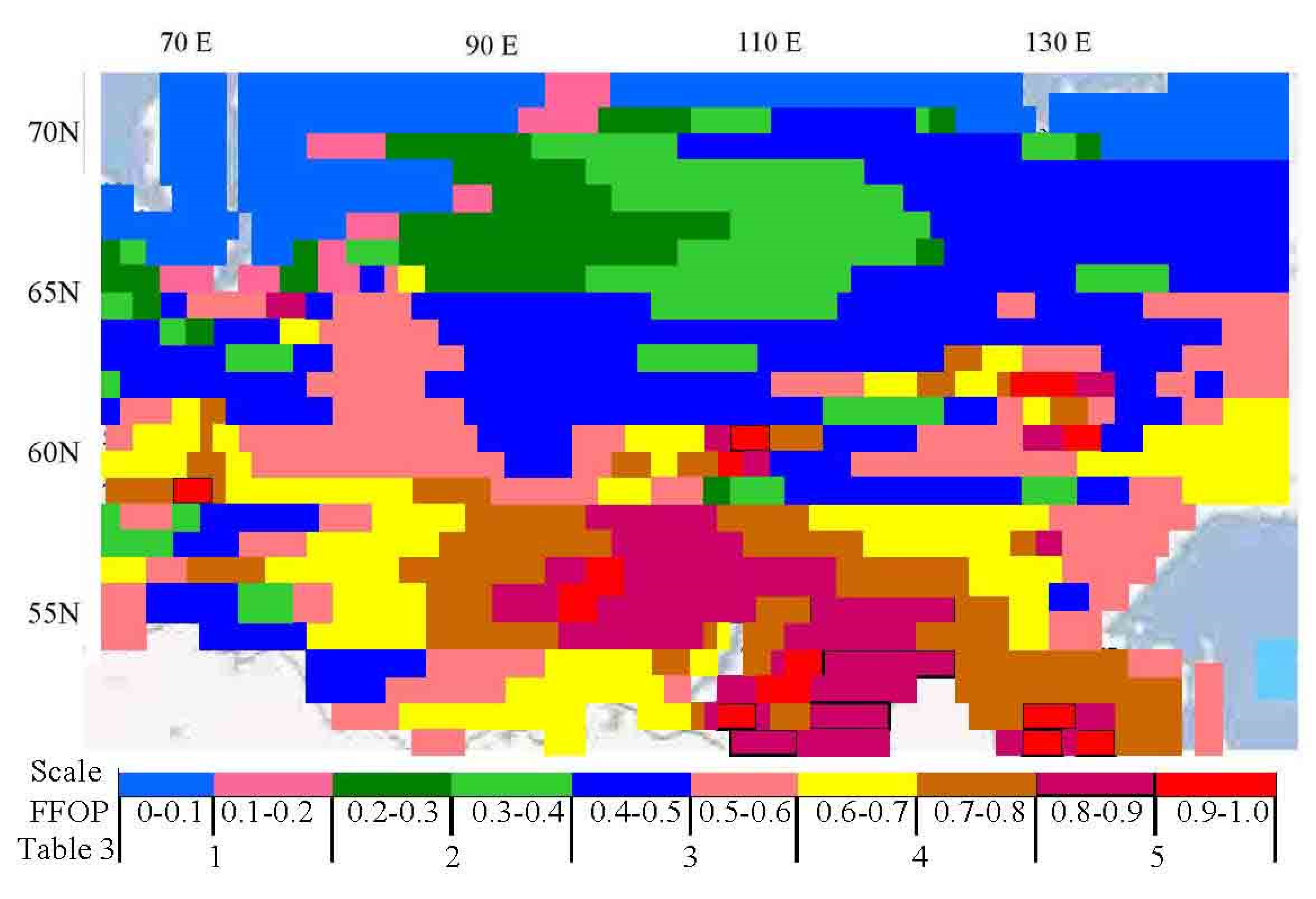
2.3. Probability of Forest Fire Occurrence
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alkhatib, A. A Review on forest fire detection techniques. Int. J. of Distrib. Sens. Netw. 2014, 10, 1–12. [Google Scholar] [CrossRef]
- Ponomarev, E.I.; Ponomareva, T.V.; Prokushkin, A.S. Intraseasonal dynamics of river discharge and burned forest areas in Siberia. Water 2019, 11, 1146. [Google Scholar] [CrossRef]
- Eskandari, S. A new approach for forest fire risk modeling using fuzzy AHP and GIS in Hyrcanian forests of Iran. Arabian J. Geosci. 2017, 10, 190–204. [Google Scholar] [CrossRef]
- Krapivin, V.F.; Varotsos, C.A. Modelling the CO2 atmosphere-ocean flux in the upwelling zones using radiative transfer tools. J. Atmos. Solar-Terr. Phys. 2016, 150, 47–54. [Google Scholar] [CrossRef]
- Varotsos, C.; Assimakopoulos, M.N.; Efstathiou, M. Long-term memory effect in the atmospheric CO2 concentration at Mauna Loa. Atmos. Chem. Phys. 2007, 7, 629–634. [Google Scholar] [CrossRef]
- Kondratyev, K.Y.; Varotsos, C. Atmospheric greenhouse effect in the context of global climate change. Il Nuovo Cimento C 1995, 18, 123–151. [Google Scholar] [CrossRef]
- Jafarzadeh, A.A.; Mahdavi, A.; Jafarzadeh, H. Evaluation of forest fire risk using the Apriori algorithm and fuzzy c-means clustering. J. Forest Sci. 2017, 63, 370–380. [Google Scholar] [CrossRef]
- Chowdhury, E.H.; Hassan, Q.K. Development of a New Daily-scale forest fire danger forecasting system using remote sensing data. Remote Sens. 2015, 7, 2431–2448. [Google Scholar] [CrossRef]
- Dowdy, A.J.; Mills, G.A.; Finkele, K.; de Groot, W. Australian Fire Weather as Represented by the McArthur Forest Fire Danger Index and the Canadian Forest Fire Weather Index; CAWCR Technical Report No. 10; The Centre for Australian Weather and Climate Research: Melbourne, Australia, 2009; 85p. [Google Scholar]
- Ganteaume, A.; Camia, A.; Jappiot, M.; San Miguel-Ayanz, J.; Long-Fournel, M.; Lampin, C. A Review of the main driving factors of forest fire ignition over Europe. Environ. Manag. 2013, 51, 651–662. [Google Scholar] [CrossRef]
- Kim, S.J.; Lim, C.-H.; Kim, G.S.; Lee, J.; Geiger, T.; Rahmati, O.; Son, Y.; Lee, W.-K. Multi-temporal analysis of forest fire probability using socio-economic and environmental variables. Remote Sens. 2019, 86, 86. [Google Scholar] [CrossRef]
- Mireku-Guimah, Y.D.; Duker, A.A. Review of methods for modeling forest fire risk and hazard. Afr. J. Environ. Sci. Technol. 2015, 9, 155–165. [Google Scholar] [CrossRef]
- White, B.; White, L.; Ribeiro, G.; Fernandes, P. Development of a fire danger index for eucalypt plantations in the northern coast of Bahia, Brazil. Floresta 2013, 43, 601–610. [Google Scholar] [CrossRef]
- Gai, C.; Weng, W.; Yuan, H. GIS-based forest fire risk assessment and mapping. In Proceedings of the Fourth International Joint Conference on Computational Sciences and Optimization, Yunnan, China, 15–19 April 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1240–1244. [Google Scholar] [CrossRef]
- Varotsos, C.A.; Krapivin, V.F. A new big data approach based on geoecological information-modeling system. Big Earth Data 2017, 1, 47–63. [Google Scholar] [CrossRef]
- Krapivin, V.F.; Nitu, C.; Varotsos, C.A. Remote Sensing Tools and Ecoinformatics; Matrix Rom: Bucharest, Romania, 2019; 332p. [Google Scholar]
- Varotsos, C.; Krapivin, V.F. Microwave Remote Sensing Tools in Environmental Science; Springer: London, UK, 2020. (in press)
- Sharkov, E.A. Passive Microwave Remote Sensing of the Earth; Physical foundation; Springer: London, UK, 2003; 615p. [Google Scholar]
- Chukhlantsev, A.A. Microwave emissions and scattering from vegetation canopies. J. Electromagn. Waves Appl. 1992, 6, 1043–1068. [Google Scholar]
- Krüll, W.; Tobera, R.; Willms, I.; Essen, H.; Wahl, N. Early forest fire detection and verification using optical smoke, gas and microwave sensors. Proc. Engin. 2012, 45, 384–394. [Google Scholar] [CrossRef]
- Statista Research Department. Russian Regions with the Largest Area Burnt by Forest Fires 2019. Available online: https://www.statista.com/statistics/1036723/russia-area-burnt-by-forest-fires-by-region/ (accessed on 8 January 2020).
- Eugenio, F.C.; dos Santos, A.R.; Fiedler, N.C.; Ribeiro, G.A. Applying GIS to develop a model for forest fire risk: A case study in Espírito Santo, Brazil. J. Environ. Manag. 2016, 173, 65–71. [Google Scholar] [CrossRef]
- Krapivin, V.F.; Shutko, A.M. Information Technologies for Remote Monitoring of the Environment; Springer/Praxis: Chichester, UK, 2012; 498p. [Google Scholar] [CrossRef]
- Li, Y.; Hu, W.; Chen, S.; Zhang, W.; Guo, R.; He, J.; Ligthart, L. Spatial resolution matching of microwave radiometer data with convolutional neural network. Remote Sens. 2019, 11, 2432. [Google Scholar] [CrossRef]
- Migliaccio, M.; Gambardella, A. Microwave radiometer spatial resolution enhancement. IEEE Trans. Geosci. Remote Sens. 2006, 43, 1159–1169. [Google Scholar] [CrossRef]
- Shutko, A.M.; Krapivin, V.F.; Haarbrink, R.B.; Sidorov, I.A.; Novichikhin, E.P.; Archer, F.; Krisilov, A.D. Practical Microwave Radiometric Risk Assessment; Professor Marin Drinov Academic Publishing House: Sofia, Bulgaria, 2010; 88p. [Google Scholar]
- Kurihara, J.; Takahashi, Y.; Sakamoto, Y.; Kuwahara, T.; Yoshida, K. HPT: A high spatial resolution multispectral sensor for microsatellite remote sensing. Sensors 2018, 18, 619. [Google Scholar] [CrossRef]
- Pampalony, P. Microwave radiometry of forests. Waves Rand. Med. 2004, 14, S275–S298. [Google Scholar] [CrossRef]
- Haarbrink, R.; Krapivin, V.F.; Krisilov, A.; Krisilov, V.; Novichikhin, E.P.; Shutko, A.M.; Sidorov, I. Intelligent data processing in global monitoring and security; ITHEA: Melbourne, Australia; Sofia-Kiev: Kyiv, Ukraine, 2011; 410p. [Google Scholar]
- Bosisio, A.V.; Dechambre, M. Predictions of microwave attenuation through vegetation: A comparison with measurements. Int. J. Remote Sens. 2004, 25, 3973–3997. [Google Scholar] [CrossRef]
- Valendik, E.N. Basic principles of boreal forest fire protection in Eurasia. In Proceedings of the 20th Tall Timbers Fire Ecology Conference: Fire in Ecosystem Management: Shifting the Paradigm from Suppression to Prescription, Boise, Idaho, 7–10 May 1996; Tall Timbers Research Station: Tallahassee, FL, USA, 1998; pp. 398–402. [Google Scholar]
- Chuvieco, E.; Cocero, D.; Riaño, D.; Martin, P.; Martínez-Vegac, J.; de la Rivad, J.; Pérez, F. Combining NDVI and surface temperature for the estimation of live fuel moisture content in forest fire danger rating. Remote Sens. Environ. 2004, 92, 322–331. [Google Scholar] [CrossRef]
- Krapivin, V.F.; Varotsos, C.A.; Marechek, S.V. The dependence of the soil microwave attenuation on frequency and water content in different types of vegetation: An empirical model. Water Air Soil Pollut. 2018, 110, 229. [Google Scholar] [CrossRef]
- Bonafoni, S.; Alimenti, F.; Angelucci, G.; Tasselli, G. Microwave radiometry imaging for forest fire detection: A simulation study. Progress Electrom. Res. 2011, 112, 77–92. [Google Scholar] [CrossRef]
- Milshin, A.A.; Grankov, A.G. Some experimental results of microwave emission of forest in L-band. Inv. Earth Space 2000, 3, 50–57. (In Russian) [Google Scholar]
- Sukov, A.I.; Soldatov, V.Y.; Krapivin, V.F.; Cracknell, A.P.; Varotsos, C.A. A sequential analysis method for the prediction of tropical hurricanes. Int. J. Remote Sens. 2008, 29, 2787–2798. [Google Scholar] [CrossRef]
- González-Alonso, F.; Merino-De-Miguel, S.; Roldán-Zamarrón, A.; García-Gigorro, S.; Cuevas, J.M. Forest biomass estimation through NDVI composites. The role of remotely sensed data to assess Spanish forests as carbon sinks. Int. J. Remote Sens. 2006, 27, 5409–5415. [Google Scholar] [CrossRef]
- Krapivin, V.F.; Varotsos, C.A.; Soldatov, V.Y. New Ecoinformatics Tools in Environmental Science: Applications and Decision-Making; Springer: London, UK, 2015; 903p. [Google Scholar] [CrossRef]
- Sun, G.; Domec, J.-C.; Amatya, D.M. Forest evapotranspiration: Measurement and modelling at multiple scales. In Forest Hydrology: Processes, Management and Assessment; Amatya, D.M., Williams, T.M., Bren, L., de Long, C., Eds.; CABI Publishers: London, UK, 2016; Chapter 3pp. 32–50. [Google Scholar]
- Onuchin, A.; Burenina, T.; Pavlov, I. Hydrological consequences of timber harvesting in landscape zones of Siberia. Environments 2017, 4, 51. [Google Scholar]
- Pengxin, W.; Shaomin, L.; Jindi, W. Study of NDVI-T’s space by combining LAI and evaporation. Sci. China Series D Earth Sci. 2006, 49, 747–754. [Google Scholar]
- Cracknell, A.P.; Varotsos, C.A. Editorial and cover: Fifty years after the first artificial satellite: From Sputnik 1 to Envisat. Int. J. Remote Sens. 2007, 28, 2071–2072. [Google Scholar] [CrossRef]
- Kondratyev, K.Y.; Krapivin, V.F. Monitoring and prediction of natural disasters. Nuov. Ciment. C Geophys. Space Phys. C 2004, 27, 657–672. [Google Scholar]
- Schunk, C.; Ruth, B.; Leuchner, M.; Wastl, C.; Menzel, A. Comparison of different methods for the in situ measurement of forest litter moisture content. Nat. Hazards Earth Syst. Sci. 2016, 16, 403–415. [Google Scholar] [CrossRef]
- Chen, S.; Wen, Z.; Jiang, H.; Zhao, Q.; Xiuying Zhang, X.; Chen, Y. Temperature Vegetation Dryness Index Estimation of Soil Moisture under Different Tree Species. Sustainability 2015, 7, 11401–11407. [Google Scholar] [CrossRef]
- Sharples, J.J.; McRae, R.H.D.; Weber, R.O.; Gill, A.M. A simple index for assessing fire danger rating. Environ. Model. Softw. 2009, 24, 764–774. [Google Scholar] [CrossRef]
- Torngern, P.; Oren, R.; Palmroth, S.; Novitck, K. Water balance of pine forests: Synthesis of new and published results. Agric. Forest Meteorol. 2018, 259, 107–117. [Google Scholar] [CrossRef]
- Speich, M.J.R.; Zappa, M.; Lischke, H. Sensitivity of forest water balance and physiological drought predictions to soil and vegetation parameters: A model-based study. Environ. Model. Softw. 2018, 102, 213–232. [Google Scholar] [CrossRef]
- Gorbatenko, V.; Dulzon, A. Variations of thunderstorm. In Proceedings of the 5th Korea-Russia International Symposium on Science and Technology, Tomsk, Russia, 26 June–3 July 2001; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2001; Volume 2, pp. 62–66. [Google Scholar]
- Konstantinova, D.A.; Gorbatenko, V.P.; Polyakov, D.V. Spatial distribution of the thunderstorm activity characteristics for the territory of western Siberia. In Proceedings of the 23 rd International Symposium on Atmospheric and Ocean Optics: Atmospheric Physics, Irkutsk, Russia, 30 November 2017; Matvienko, G.G., Romanovskij, S.R., Eds.; Institute of Atmospheric Optics: Irkutsk, Russia, 2018; Volume 10466. [Google Scholar] [CrossRef]
- Mullayarov, V.A.; Toropov, A.A.; Kozlov, V.I. Patterns of spatial distribution of positive thunderstorm discharges in Eastern Siberia. Russ. Meteor. Hydrol. 2009, 34, 364–370. [Google Scholar] [CrossRef]
- Tarabukina, L.; Kononova, N.; Kozlov, V.; Innokentiev, D. Analysis of atmospheric circulation condition during severe thunderstorms in Yakutia in 2009–2016. In E3S Web of Conferences; EDP Sciences: Les Uis, France, 2018; Volume 62, p. 01001. [Google Scholar] [CrossRef]
- Kamatsu, H.; Kumagai, T.; Hotta, N. Effects of vertical air temperature distribution within forest canopies on photosynthesis and transpiration. Bull. Kyushu University Forum 2007, 88, 1–19. [Google Scholar]
- Baranovskiy, N.V.; Kuznetsov, G.V. Forest Fire Occurrences and Ecological Impact Prediction; Publishing House of the Siberian Branch of the Russian Academy of Sciences: Novosibirsk, Russia, 2017; 259p. [Google Scholar]
- Prestemon, J.P.; Butry, D.T. Time to burn: Modeling wildland arson as an autoregressive crime function. Am. J. Agric. Econ. 2005, 87, 756–770. [Google Scholar] [CrossRef]
- Shamina, O.; Kiseleva, M. It is conflagrated what is profitable to cut down. How work “commercial” the forest arsons? Russian BBC News, 2 August 2019. [Google Scholar]
- Krapivin, V.F.; Shutko, A.M.; Chukhlantsev, A.A.; Golovachev, S.P.; Phillips, G.W. GIMS-based method for vegetation microwave monitoring. Environ. Model. Softw. 2006, 21, 330–345. [Google Scholar] [CrossRef]
- Chukhlantsev, A.A. Microwave Radiometry of Vegetation Canopies; Springer: Berlin, Germany, 2006; 287p. [Google Scholar]
- Meesters, A.G.C.A.; De Jeu, R.A.M.; Manfred, O. Analytical derivation of the vegetation optical depth from the microwave polarization difference index. IEEE Geosci. Remote Sens. Let. 2005, 2, 121–123. [Google Scholar] [CrossRef]
- Wen, J.; Jackson, T.J.; Bindlish, R.; Hsu, A.Y. Retrieval of soil moisture and vegetation water content using SSM/I data over a corn and soybean region. J. Hydromet. Spec. Sect. 2005, 6, 854–863. [Google Scholar] [CrossRef]
- Singh, R.P.; Dadhwal, V.K. Comparison of space-based microwave polarization difference index and normalized difference vegetation index for crop growth monitoring. Indian J. Radio Space Phys. 2003, 32, 193–197. [Google Scholar]
- Ershov, D.V.; Kovganko, K.A., Shuliak. Present possibilities of geoinformation monitoring system GIS-ISRM of Rosleshoz. Fire Saf. J. 2010, 19, 38–46. (In Russian) [Google Scholar]
- Basilevich, N.I. Biological Productivity of the Ecosystem of Northern EuroAsia; Science Publication: Moscow, Russia, 1993; 293p. (In Russian) [Google Scholar]
- Krestov, P. Forest vegetation of Easternmost Russia (Russian Far East). In Forest Vegetation of Northeast Asia; Kolbek, J., Strutek, M., Box, E., Eds.; Springer: London, UK, 2003; pp. 93–180. [Google Scholar]
- Kolesnik, S.; Kolmakov, A.; Tsyupa, I. Thunderstorm activity in the West Siberian Region and its influence on the electromagnetic hum of the ELF band. In Proceedings of the Russian Open Conference on Radio Wave Propagation (RWP), Kazan, Russia, 1–6 July 2019. [Google Scholar] [CrossRef]
- Lee, H.; College, D.B.; Mcculley, R.L.; Archer, S.R. Soil moisture and soil-litter mixing effects on surface litter decomposition: A controlled environment assessment. Soil Biol. Biochem. 2014, 72, 123–132. [Google Scholar] [CrossRef]
- Felde, G.W. The effect of soil moisture on the 37GHz microwave polarization difference index (MPDI). Int. J. Remote Sens. 1998, 19, 1055–1078. [Google Scholar] [CrossRef]
- Kondratyev, K.Y.; Krapivin, V.F.; Savinykh, V.P.; Varotsos, C.A. Global Ecodynamics: A Multidimensional Analysis; Springer/PRAXIS: Chichester, UK, 2004; 658p. [Google Scholar]
- Kempka, T.; Kaiser, T.; Solbach, K. Microwaves in fire detection. Fire Saf. J. 2006, 41, 327–333. [Google Scholar] [CrossRef]
- Varotsos, C. An introduction to our chaotic atmosphere and climate. Phys. Today 2020, 73, 54. [Google Scholar] [CrossRef]
- Efstathiou, M.N.; Varotsos, C.A. On the altitude dependence of the temperature scaling behaviour at the global troposphere. Int. J. Remote Sens. 2010, 31, 343–349. [Google Scholar] [CrossRef]
- Varotsos, C.A.; Efstathiou, M.N.; Cracknell, A.P. On the scaling effect in global surface air temperature anomalies. Atmos. Chem. Phys. 2013, 13, 5243–5253. [Google Scholar] [CrossRef]
- Varotsos, C.; Cartalis, C. Re-evaluation of surface ozone over Athens, Greece, for the period 1901–1940. Atmos. Res. 1991, 26, 303–310. [Google Scholar] [CrossRef]
- Cracknell, A.P.; Varotsos, C.A. New aspects of global climate-dynamics research and remote sensing. Int. J. Remote Sens. 2011, 32, 579–600. [Google Scholar] [CrossRef]
- Efstathiou, M.N.; Varotsos, C.A. Intrinsic properties of Sahel precipitation anomalies and rainfall. Theor. Appl. Clim. 2012, 109, 627–633. [Google Scholar] [CrossRef]
- Tzanis, C.; Tsivola, E.; Efstathiou, M.; Varotsos, C. Forest fires pollution impact on the solar UV irradiance at the ground. Fresenius Environ. Bull 2009, 18, e2158. [Google Scholar]
- Varotsos, C.; Efstathiou, M.; Tzanis, C. Scaling behaviour of the global tropopause. Atmos. Chem. Phys. 2009, 9, 677–683. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (GHz) | Wavelength (cm) | Pixels/Scan | Resolution (m) | Mode |
|---|---|---|---|---|
| 37.5 | 0.8 | 32 | 0.04 × H | Scanning |
| 22.2 | 1.35 | 16 | 0.05 × H | Scanning |
| 13.3 | 2.25 | 16 | 0.08 × H | Scanning |
| 5.5 | 5.5 | 6 | 0.13 × H | Scanning |
| 3.0 | 10.0 | 2 | 0.31 × H | Scanning |
| 1.43 | 21 | 2 | 0.65 × H | Twin-beam |
| Sub-Block | Sub-Block Function | References |
|---|---|---|
| CFFOP | Calculation of the forest fire occurrence probability (FFOP) | [8,9] |
| SMIT | Solution of microwave inverse task for estimating volumetric moisture content in forest soil-litter and canopy. | [29,30,31] |
| DWFFD | Evaluation of pre-fire conditions. Definition of weights of the forest fire danger factors. Detection of both fire-prone pixels and pixels where the burning process is performed. | [32,33] |
| ASCID | Analysis of slowly changed input data and their updating. | [15] |
| EVSE | Evaluation of the vegetation screening effect. Calculation of forest physical temperatures using the observed brightness temperatures. | [34,35,36] |
| SDMP | Sequential decision-making procedure. | [37] |
| FBESD | Forest biomass estimation via satellite data. | [38] |
| FWBM | Forest water balance model. Parameterization of the components from the hydrological balance equation. | [39,40,41,42] |
| FFOPM | FFOP mapping. | [29] |
| Scale | Fire Risk | Soil-Litter Moisture, % | Fire Hazard | Fire Area, km2 |
|---|---|---|---|---|
| 0 | Fire is absent | 35–40 | Dangerous does not exist | 0–0.5 |
| 1 | Unlikely | 30–35 | Negligible | 0.5–2 |
| 2 | Possible | 25–30 | Slight | 2–4 |
| 3 | Quite possible | 20–25 | Moderate | 4–6 |
| 4 | Likely | 15–20 | Severe | 6–10 |
| 5 | Very likely | less 15 | Very severe | more 10 |
| Type of Soil-Plant Formation | Wavelength, χ | |||
|---|---|---|---|---|
| χ = 2.25 cm | χ = 21 cm | |||
| b | d | b | d | |
| Mid-taiga forests | −0.716 | 0.121 | −1.434 | 0.077 |
| North-taiga forests | −0.772 | 0.151 | −0.793 | 0.216 |
| Mixed forests | −0.676 | 0.212 | −0.816 | 0.149 |
| South-taiga forests | −0.734 | 0.309 | −0.802 | 0.284 |
| Forest-tundra | −0.783 | 0.097 | −0.742 | 0.084 |
| Broad-leaved forests | −0.756 | 0.128 | −0.699 | 0.234 |
| Type of Soil-Plant Formation | Formation Area (106 km2) | Daily Production (g/m2/day) | Phytomass (kg/m2) | Dead Organic Matter (kg/m2) |
|---|---|---|---|---|
| Mid-taiga forests | 0.88 | 4.2 | 22.5 | 10.8 |
| North-taiga forests | 0.83 | 3.6 | 10.0 | 8.1 |
| Mixed forests | 0.24 | 5.8 | 25.0 | 25.1 |
| South-taiga forests | 1.08 | 4.3 | 23.5 | 14.5 |
| Forest-tundra | 0.29 | 4.3 | 3.8 | 9.0 |
| Forest-steppes | 0.31 | 4.9 | 1.9 | 38.0 |
| Broad-leaved forests | 0.23 | 8.3 | 45.0 | 24.8 |
| Total | 3.86 | 35.4 | 131.7 | 130.3 |
| Days after Rainfall | Rainfall, cm | |||||||
|---|---|---|---|---|---|---|---|---|
| 0.1 | 0.3 | 0.5 | 1 | 2 | 3 | 4 | 5 | |
| 1 | 52 | 65 | 71 | 77 | 78 | 80 | 89 | 94 |
| 2 | 29 | 32 | 39 | 42 | 49 | 55 | 68 | 89 |
| 4 | 21 | 23 | 29 | 32 | 37 | 42 | 54 | 74 |
| 6 | 18 | 19 | 25 | 28 | 32 | 35 | 48 | 65 |
| 8 | 17 | 17 | 22 | 25 | 27 | 29 | 42 | 57 |
| 10 | 16 | 16 | 19 | 22 | 25 | 28 | 37 | 51 |
| 15 | 15 | 16 | 18 | 22 | 23 | 24 | 28 | 39 |
| 20 | 13 | 14 | 15 | 21 | 22 | 22 | 23 | 29 |
| 30 | 11 | 12 | 13 | 17 | 17 | 17 | 19 | 21 |
| No | Pixel Geographical Coordinates | Soil-Litter Moisture, % | ||||
|---|---|---|---|---|---|---|
| Model | IL-18 | Difference | In-situ Data | Average Error, % | ||
| 1 | 56°17′17′′N, 95°54′21′′E; 56°17′10′′N, 95°54′28′′E | 15.2 | 14.1 | 1.1 | 14.4 | 3.7 |
| 2 | 49°51′42′′N, 129°48′25′′E; 49°51′35′′N, 129°48′32′′E | 13.6 | 10.2 | 3.4 | 12.7 | 15.5 |
| 3 | 52°57′21′′N, 104°19′06′′E; 52°57′14′′N, 104°19′13′′E | 11.3 | 10.1 | 1.2 | 9.8 | 8.2 |
| 4 | 51°59′51′′N, 79°15′48′′E; 51°59′44′′N, 79°15′55′′E | 18.1 | 16.8 | 1.3 | 16.9 | 3.6 |
| 5 | 50°47′14′′N, 114°29′17′′E; 50°47′07′′N, 114°29′24′′E | 13.7 | 11.9 | 1.8 | 10.6 | 16.8 |
| 6 | 51°57′39′′N, 79°13′48′′E; 51°57′32′′N, 79°13′55′′E | 35.4 | 33.7 | 1.7 | 34.3 | 3.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Varotsos, C.A.; Krapivin, V.F.; Mkrtchyan, F.A. A New Passive Microwave Tool for Operational Forest Fires Detection: A Case Study of Siberia in 2019. Remote Sens. 2020, 12, 835. https://doi.org/10.3390/rs12050835
Varotsos CA, Krapivin VF, Mkrtchyan FA. A New Passive Microwave Tool for Operational Forest Fires Detection: A Case Study of Siberia in 2019. Remote Sensing. 2020; 12(5):835. https://doi.org/10.3390/rs12050835
Chicago/Turabian StyleVarotsos, Costas A., Vladimir F. Krapivin, and Ferdenant A. Mkrtchyan. 2020. "A New Passive Microwave Tool for Operational Forest Fires Detection: A Case Study of Siberia in 2019" Remote Sensing 12, no. 5: 835. https://doi.org/10.3390/rs12050835
APA StyleVarotsos, C. A., Krapivin, V. F., & Mkrtchyan, F. A. (2020). A New Passive Microwave Tool for Operational Forest Fires Detection: A Case Study of Siberia in 2019. Remote Sensing, 12(5), 835. https://doi.org/10.3390/rs12050835