1. Introduction
The National Aeronautics and Space Administration’s (NASA) Soil Moisture Active Passive (SMAP) satellite launched on 31 January 2015 was designed as a soil-moisture mission, but expanded to retrieve sea-surface salinity (SSS) from space continuing the legacy of the Aquarius mission (2011–2015), the NASA pathfinder ocean-salinity satellite [
1,
2,
3,
4]. SMAP spinning antenna allows it to observe Earth in nearly full 360° scans in few seconds, and overlapping loops create a 1000 km wide swath. The surface footprint is 39 × 47 km, and the satellite observes each ground location in both forward (
fore) and backward (
aft) directions, with observations taken a few minutes apart. The SMAP satellite’s 40 km effective spatial resolution is similar to that of Soil Moisture Ocean Salinity (SMOS), the European Space Agency’s salinity mission launched in November 2009, and quite improved relative to the retired Aquarius (about 150 km). SMAP has an exact repeat cycle of eight days, but it reaches global coverage in about 2–3 days. SSS retrievals are available from April 2015 to the present.
Ocean salinity is far from being the primary factor contributing to the received signals by satellite L-band radiometers. There are several unwanted signals that must be removed to retrieve salinity [
1,
2,
4]. These unwanted signals include extraterrestrial contributions (e.g., galaxy, moon, sun), antenna-radiation emissions, Faraday rotation in Earth’s ionosphere, atmospheric attenuation, sea-surface temperature and roughness, and land contamination near coastlines (i.e., leakage of emissivity from the land surface into the radiometer receiver [
3]). Besides that, there is also Radio Frequency Interference (RFI) that results from the unauthorized use of the protected L-band that may be intense in some coastal areas [
1,
2,
5,
6]. However, RFI contamination is much more mitigated in SMAP when compared with Aquarius and SMOS [
5]. A description of the used algorithms to retrieve SSS from SMAP can be found in [
1,
2,
6,
7].
Global-assessment studies show that SMAP captures SSS in open-ocean water away from the coast with similar efficiency as the Aquarius and SMOS satellites [
1,
3,
6,
7,
8]. The global root-mean-square difference (
) between satellite and in situ SSS observations is around 0.2 (practical salinity is dimensionless). However, the exact value depends on the SMAP product version, processing level, analyzed period, and in situ observations taken as ground truth. More importantly, what these assessments reveal is that the SMAP performance (given by bias,
, correlation, and other statistics) is regionally dependent. Fortunately, there is a continuous advance of SMAP SSS retrieval algorithms from one product version to the next [
6,
7], and improvements stand out in (initially) low-performance regions (see, e.g., Figure 3.4 in [
7]).
SMAP’s advances (e.g., better RFI mitigation, upgraded land correction, and higher spatial resolution) constitute a giant leap for understanding sea-surface-salinity variability using satellites in environments that not long ago were unthinkable, such as the Arctic Ocean [
9]. Retrieving SSS from space in the Arctic is remarkably difficult given the reduced sensitivity of L-band radiometers in cold seawater (<5 °C), ice and land contamination, the considerable uncertainty in sea-surface-roughness correction there, and few in situ observations available for validation [
9].
Besides the Arctic Ocean, SMAP has also been shown to capture SSS signals in several regions around the globe within 500–1000 km offshore, a long-term challenge for remote sensing of salinity because of land contamination and RFI effects near the coast. These regions include the river-influenced Gulf of Mexico [
10,
11,
12], cold-waters from the Gulf of Maine in the Northwest Atlantic [
13,
14], the California coast in the Northeast Pacific [
15,
16], the Mediterranean Sea [
3,
17], the Ganges–Brahmaputra river plume in the Bay of Bengal [
18], the intricate Indonesia Seas [
19], and the high latitudes of the Southern Ocean [
20,
21], just to cite some recent SMAP SSS applications.
The present work assesses the most recent version of two distinct SMAP SSS product series between April 2015 and September 2019, one series processed by NASA’s Jet Propulsion Laboratory (JPL) [
7] and the other by Remote Sensing Systems (RSS) [
6], as described in
Section 2.1. For readers interested in previous SMAP product versions, please consult e.g., Fore et al. [
7] and Meissner et al. [
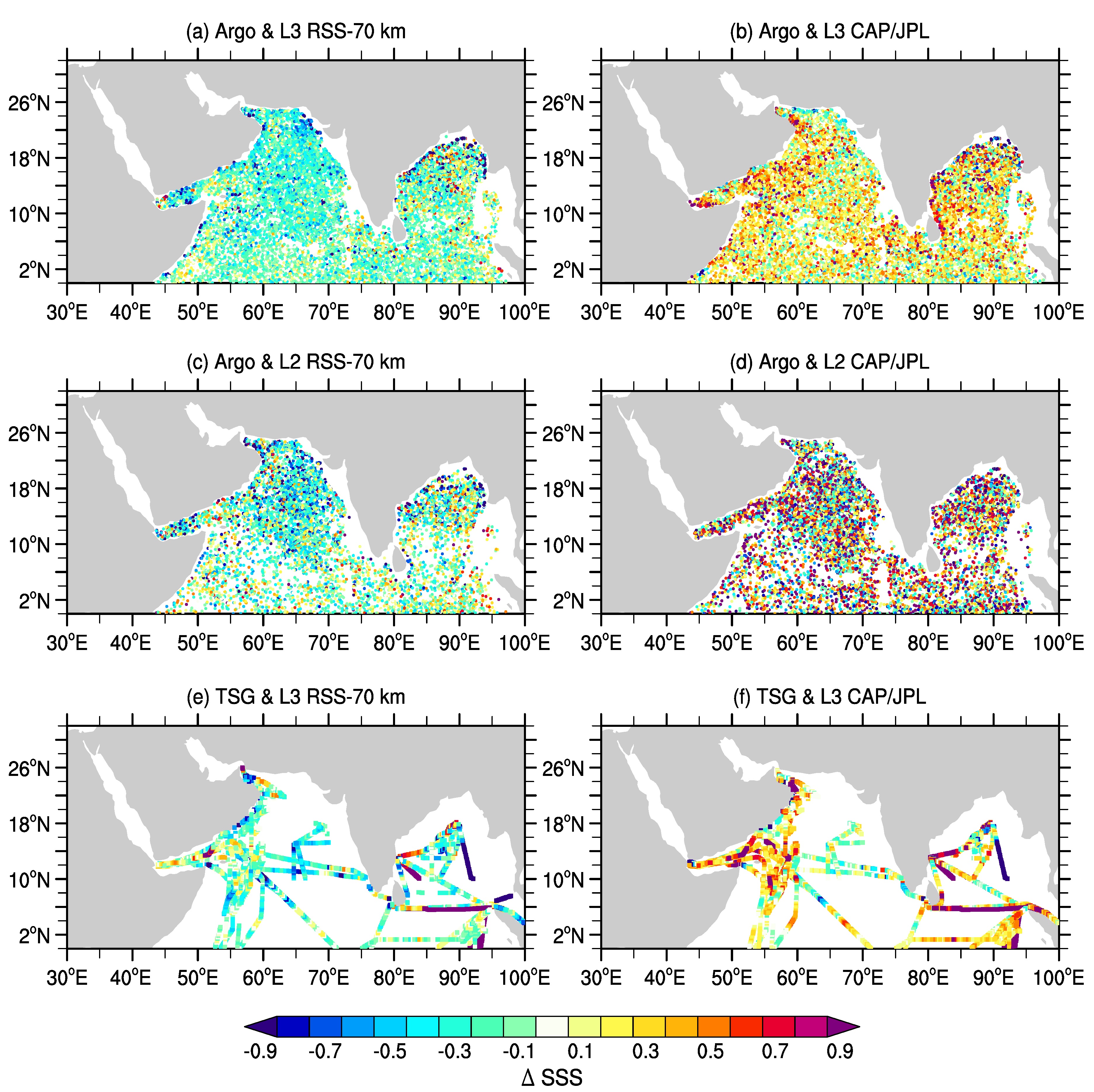
6]. The focus of the present work is on the Northwest Indian Ocean: the Arabian Sea, the extremely salty Red Sea (salinity above 38), and the Gulf of Aden—regions where SMAP SSS has not yet been thoroughly evaluated. Previously, SMAP in the Northwest Indian Ocean had a conspicuous freshening bias when compared with in situ Argo observations (Figure 9c in [
1]). This assessment is the first step to use SMAP to understand better the salinity dynamics of the Northwest Indian Ocean, a place where circulation reverts seasonally in response to monsoonal winds, mesoscale eddies and Rossby waves are ubiquitous, and in situ salinity observations are historically scarce e.g., [
22,
23,
24,
25,
26,
27,
28,
29,
30]. For the sake of completeness, this work also evaluates SMAP products in the Bay of Bengal. Several studies have already successfully used SMAP SSS in the latter region [
3,
18,
31], but they are based on previous SMAP versions over shorter periods. The updated evaluation presented here contributes to a better view of the strengths and limitations that are still present in SMAP there.
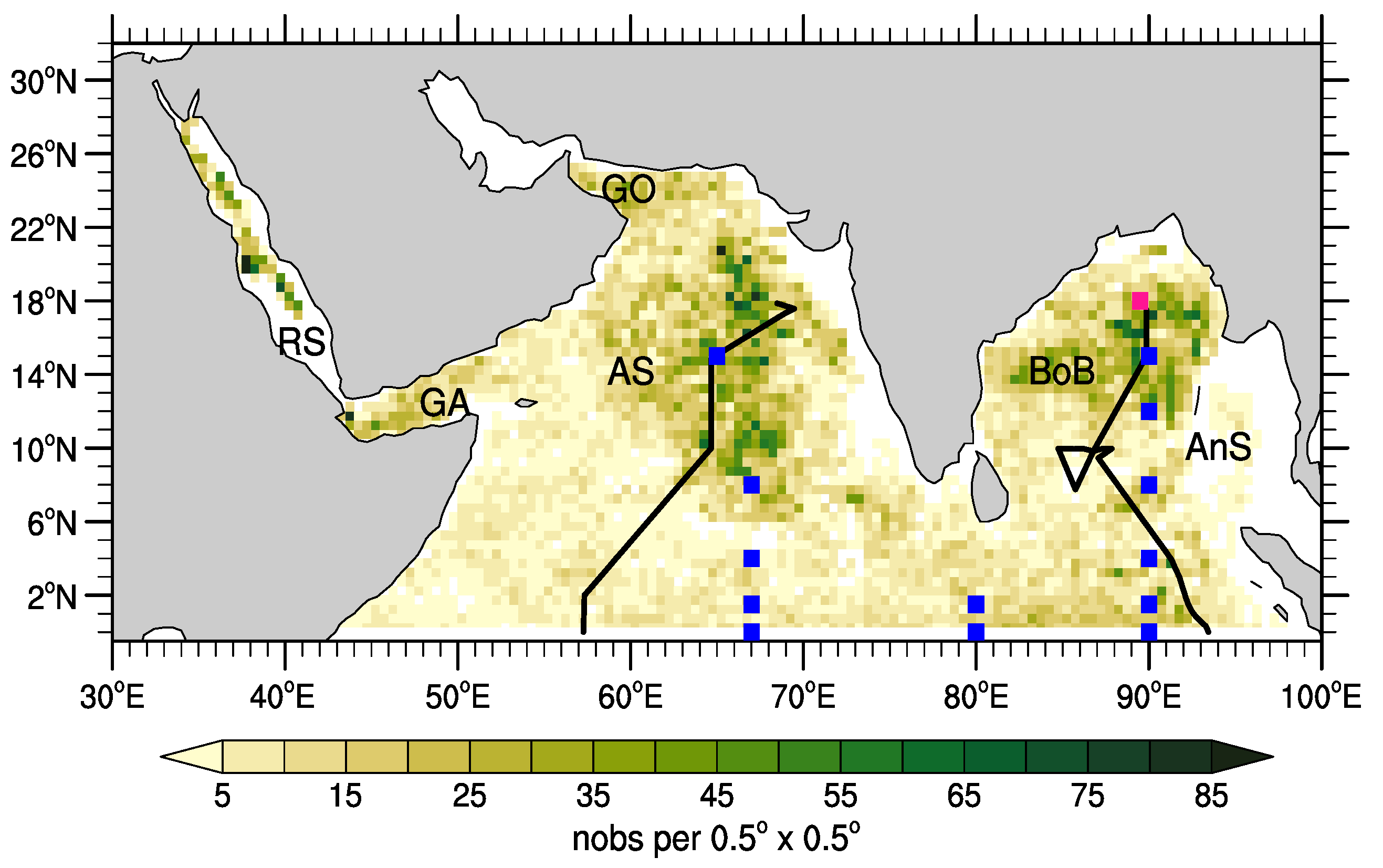
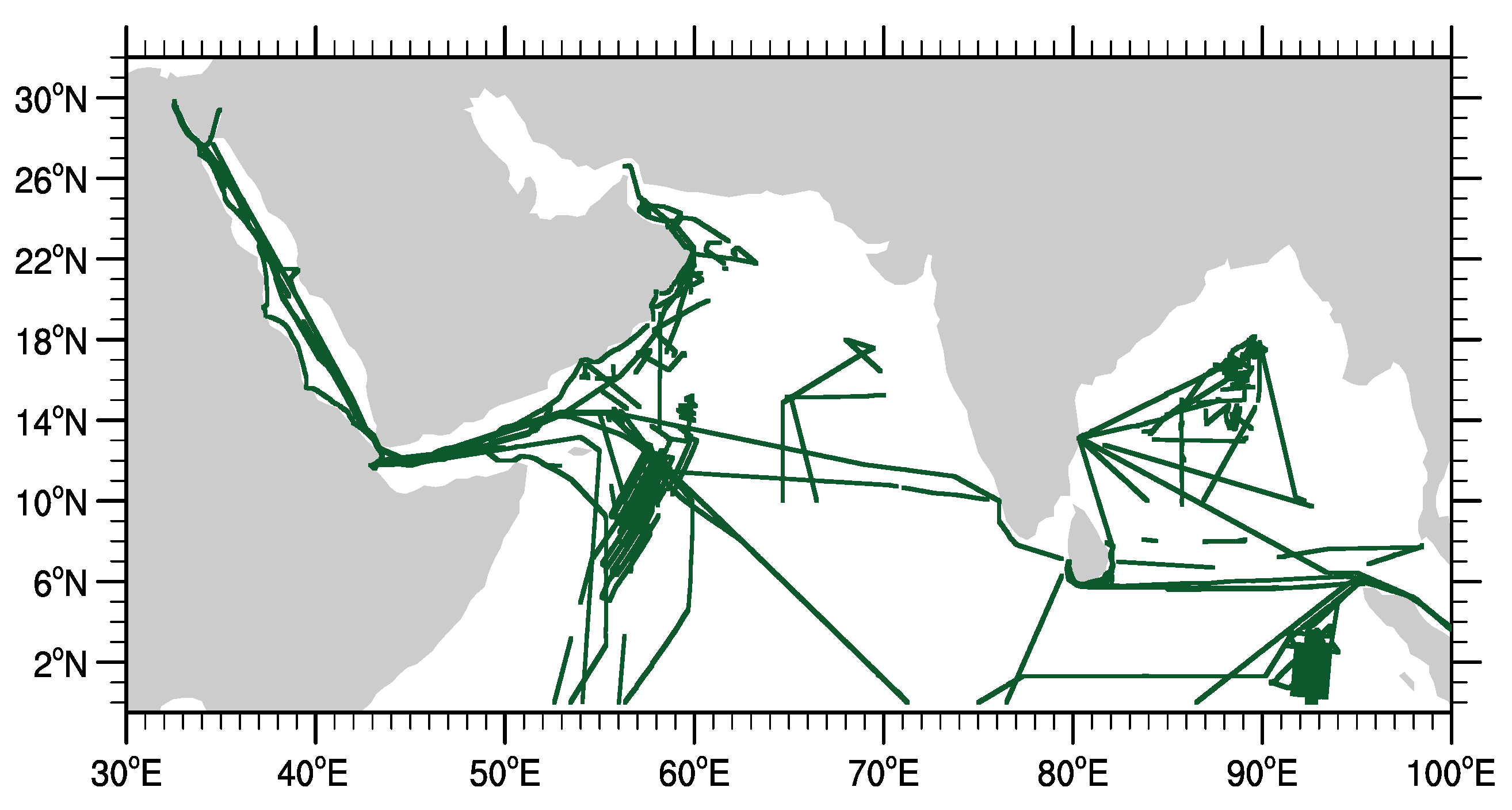
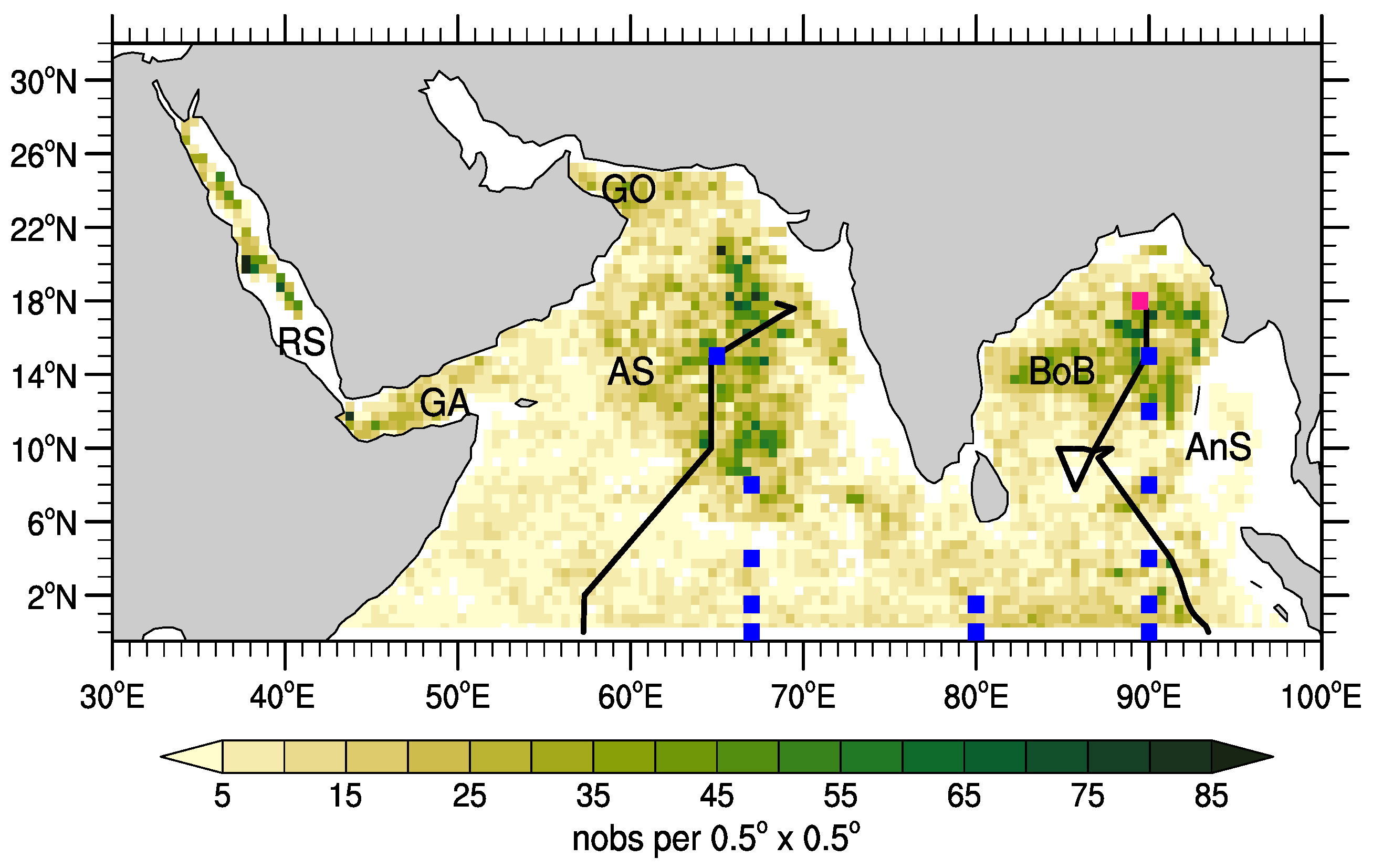
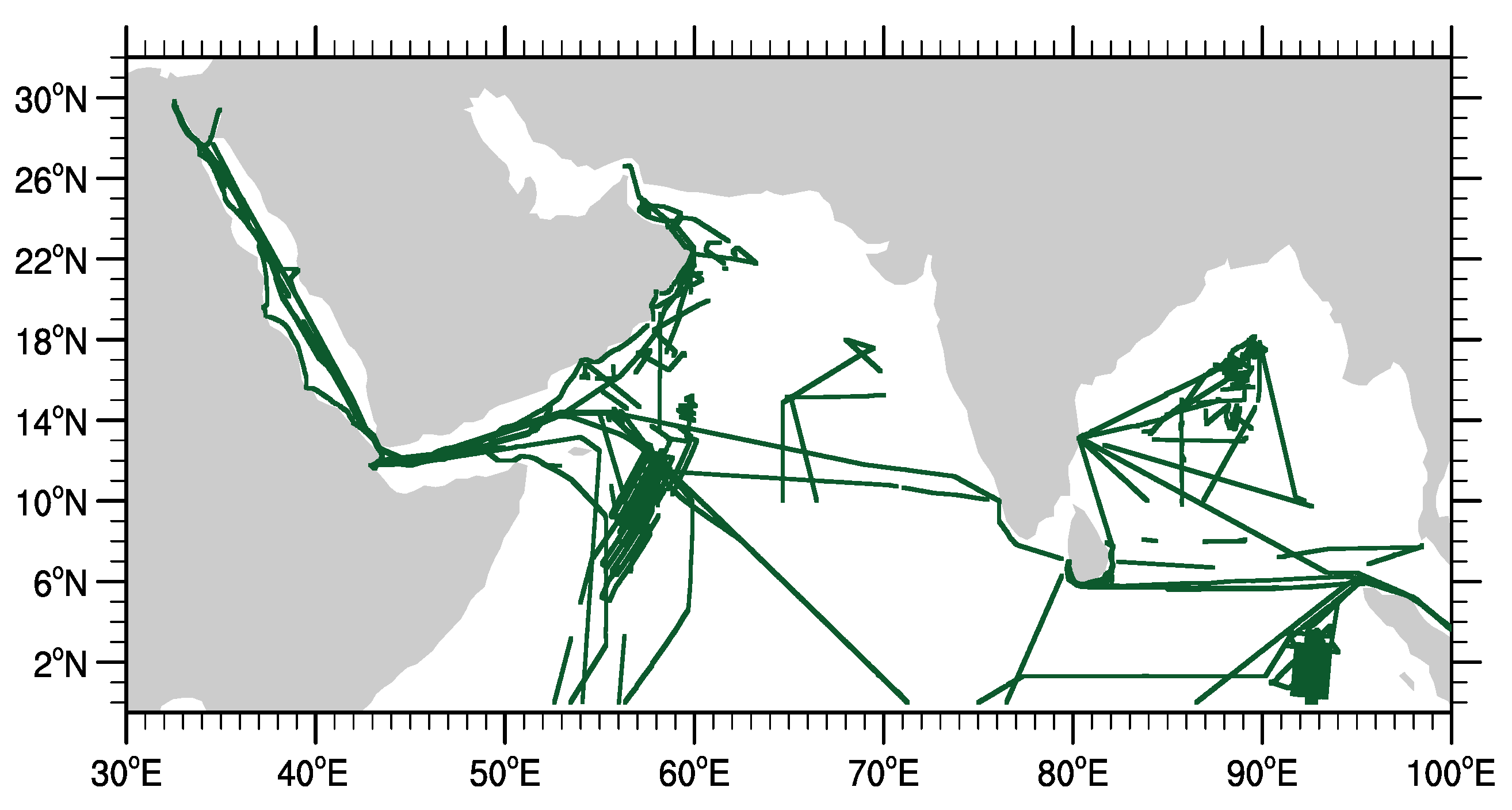
For assessing SMAP SSS, this work uses almost all publicly available in situ salinity measurements over the SMAP era. They come from a variety of sources that include Argo floats, thermosalinographs (TSG), ship-based Conductivity–Salinity–Depth (CTD) from the Global Ocean Ship-based Hydrographic Investigations Program (GO-SHIP) [
32], and time series from moored buoys.
Satellite and in situ salinity measurements are inherently different due to technological constraints. Boutin et al. [
33] and Vinogradova et al. [
4] give excellent overviews of these differences and implications. For instance, SSS from L-band radiometers refers to the first top centimeter of the ocean, while in situ measurements are usually from 1 to 10 meters below the sea surface depending on in situ instrument characteristics. In the case of intense precipitation, salinity near the air–sea interface may be fresher than that in 1-m depth or below. Some in situ observations are instantaneous measurements, such as from Argo floats; others can be hourly or daily averages, such as time series from moored buoys, and these differences may affect comparison statistics between satellite and in situ observations. Moreover, there is variability within the satellite footprint that is captured by in situ measurements but not by the satellite, in which SSS can be interpreted as a spatial-average over the footprint [
33,
34,
35]. Because of the inconsistency between satellite and in situ measurements, the present work uses the term “difference” instead of “error” to refer to it (see [
4] for a discussion on this matter).
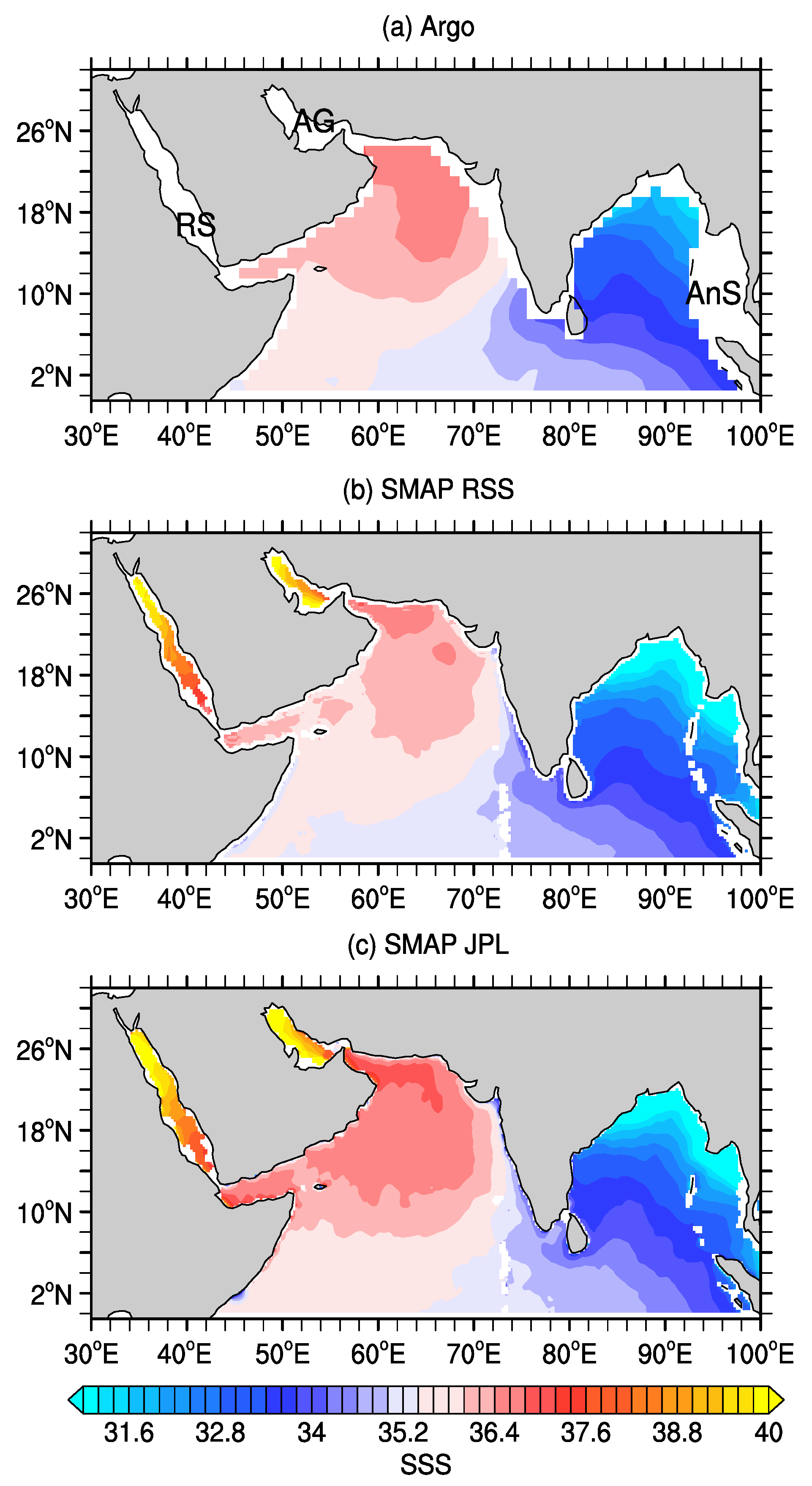
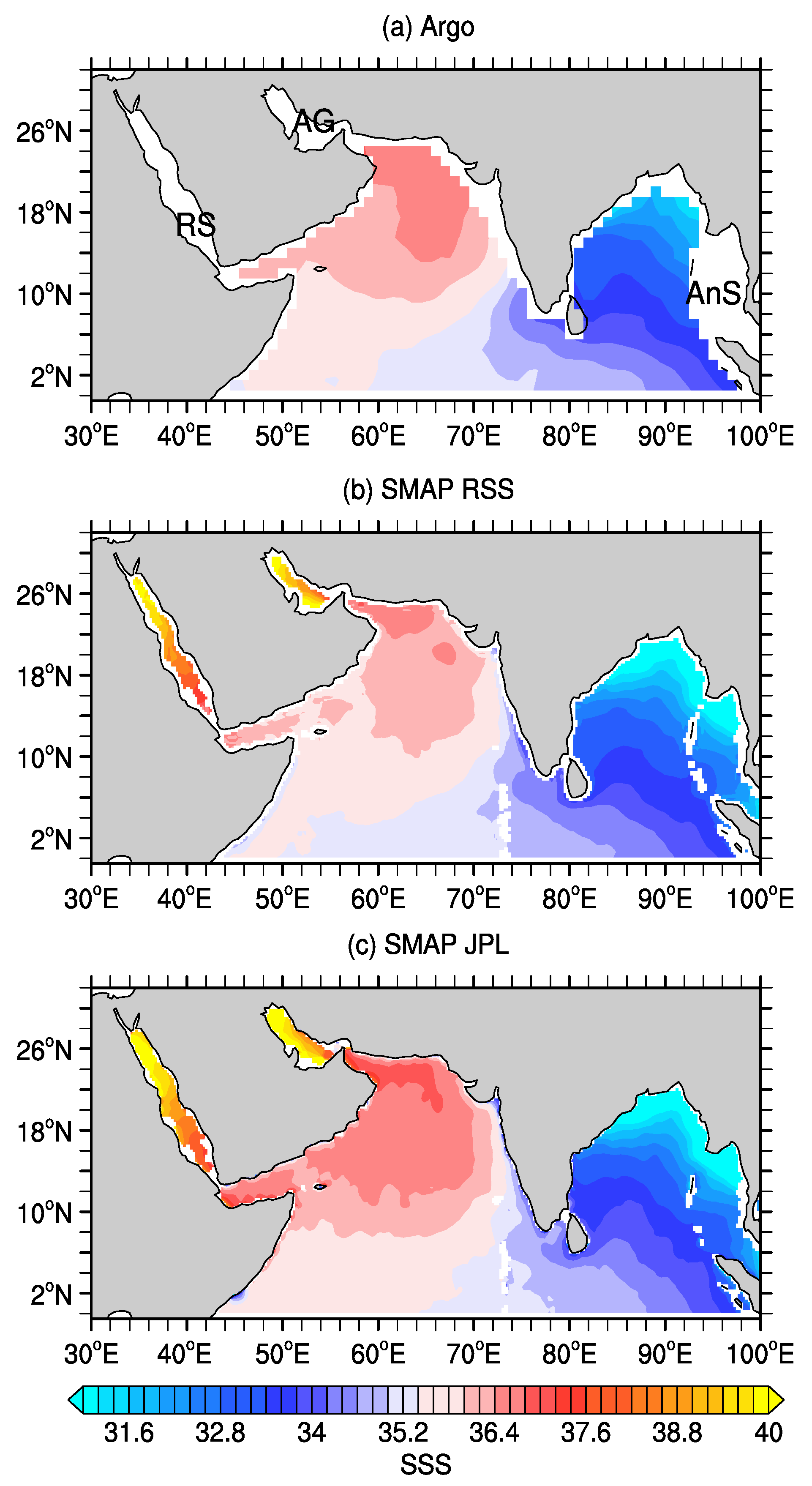
Figure 1 shows the mean SSS field for four years (September 2015 to September 2019) based on Argo in situ observations mapped into a 1°× 1° grid [
36], and the mean fields from the two SMAP products that are evaluated in the present work. The period for calculating the mean fields was chosen to start in September 2015 because there was an indication that SMAP SSS retrievals may have been degraded during the early months of the mission (April–August 2015) [
6].
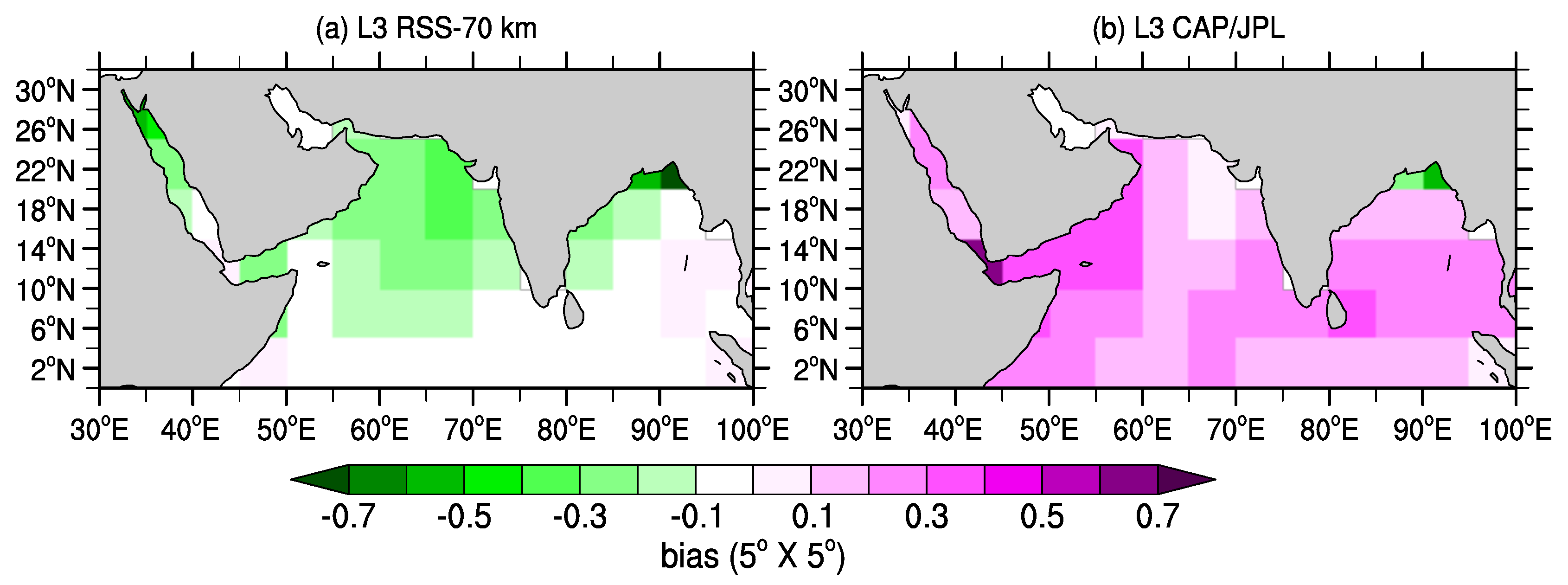
In the long-term mean, in situ and satellite fields agree relatively well with a strong east–west gradient of surface salinity: SSS varies from less than 32.4 in the Bay of Bengal to more than 36.6 in the Arabian Sea, although RSS/JPL products slightly under-/overestimated in situ SSS as measured by Argo in the Arabian Sea. Broadly speaking, the Indian Ocean salinity pattern is controlled by four major processes [
37,
38,
39,
40,
41,
42,
43]: net-air sea fluxes (evaporation minus precipitation), runoff from large rivers in the Bay of Bengal, inflow of relatively fresh waters from the Pacific Ocean through Indonesian throughflow straits, and inflow of saltier waters from the Red Sea and the Arabian/Persian Gulf. The wide salinity range and a variety of processes controlling SSS make the North Indian Ocean especially attractive to assess spaceborne SSS measurements.
A difference in the maps of
Figure 1 is the absence of in situ observations in marginal seas (the Red Sea and the Arabian/Persian Gulf in the western, and the Andaman Sea in the eastern). Marginal seas are usually not included in Argo-gridded products [
4,
36] because the amount of in situ observations is much reduced and even nonexistent in these regions, such as in the very shallow Arabian/Persian Gulf (maximum depths of 110–160 m [
44]). In the SMAP fields of
Figure 1, there are also defined SSS values closer to the coast than in the Argo SSS mean-field as float-parking depth is around 1000 m, with few observations in shallow waters (<1000 m) in the standard Argo program [
36].
Apart from Argo, other sources of in situ salinity observations are also sparse in time and space in marginal seas of the Indian Ocean. Take, for instance, the extremely salty Red Sea. Most knowledge of salinity dynamics there is based on numerical simulations, and few in situ observations exist [
22,
45,
46,
47,
48,
49,
50]. The scarcity of salinity measurements may be surprising because the Red Sea has one of Earth’s largest evaporation rates with an annual mean of around 2 m/yr, which makes the Red Sea a crucial source of moisture for the arid Middle Eastern atmosphere and an essential component of the regional hydrological cycle [
46,
51,
52,
53]. In consequence of the extreme evaporation, freshwater must be imported from adjacent basins (the Gulf of Aden and the Arabian Sea) to keep sea level and mean salinity in a steady-state [
48]. As part of the ocean dynamics (which is controlled by buoyancy forcing dominated by salinity [
54]), one of the saltiest water masses of the global oceans is formed in the extreme north of the Red Sea: the Red Sea Overflow Water (RSOW), which escapes the marginal sea and spreads to the intermediate depths of the whole Indian Ocean [
24]. Although salinity is a crucial variable in the Red Sea, both as an indicator of the regional hydrological cycle and as a dynamical forcing, our knowledge about its variability is incipient given the scarcity of in situ observations e.g., [
22,
51].
Therefore, it is appropriate to ask whether SMAP could capture salinity in a narrow marginal sea such as the Red Sea. It is now known that SMAP can retrieve signals, although with limitations, in complex regions such as the Mediterranean Sea and the Arctic Ocean. However, the maximum Red Sea width is only about 355 km with coastlines on both sides, so land contamination and the RFI may be a severe issue precluding SSS retrievals. A similar problem may occur in the Gulf of Aden that is surrounded by land. The present work addresses this problem through exploratory analysis of SMAP data in these particular areas, and results are promising for the Red Sea.
The paper is organized as follows:
Section 2 describes satellite and in situ SSS data, and collocation procedures and statistics used to assess SMAP performance;
Section 3 outlines statistical-analysis results for the Arabian Sea (
Section 3.1), Bay of Bengal (
Section 3.2), and the Red Sea (
Section 3.3);
Section 4 and
Section 5 provide a discussion and a summary of the present work, respectively.
4. Discussion
Several studies reported that SMAP is able to retrieve SSS with some confidence in coastal regions within 500–1000 km offshore in many places around the globe [
11,
12,
13,
14,
15,
16,
17,
18,
19]. The present study adds another region to that list: the Red Sea. The Red Sea is an extremely salty environment, such as the Mediterranean Sea, and the issues to retrieve SSS in these two marginal seas are somehow similar [
3,
17]. However, the Red Sea is narrower on average, and land contamination would be expected to be a more severe issue there. Nonetheless, this work revealed a great SMAP signal-to-noise ratio in the Red Sea.
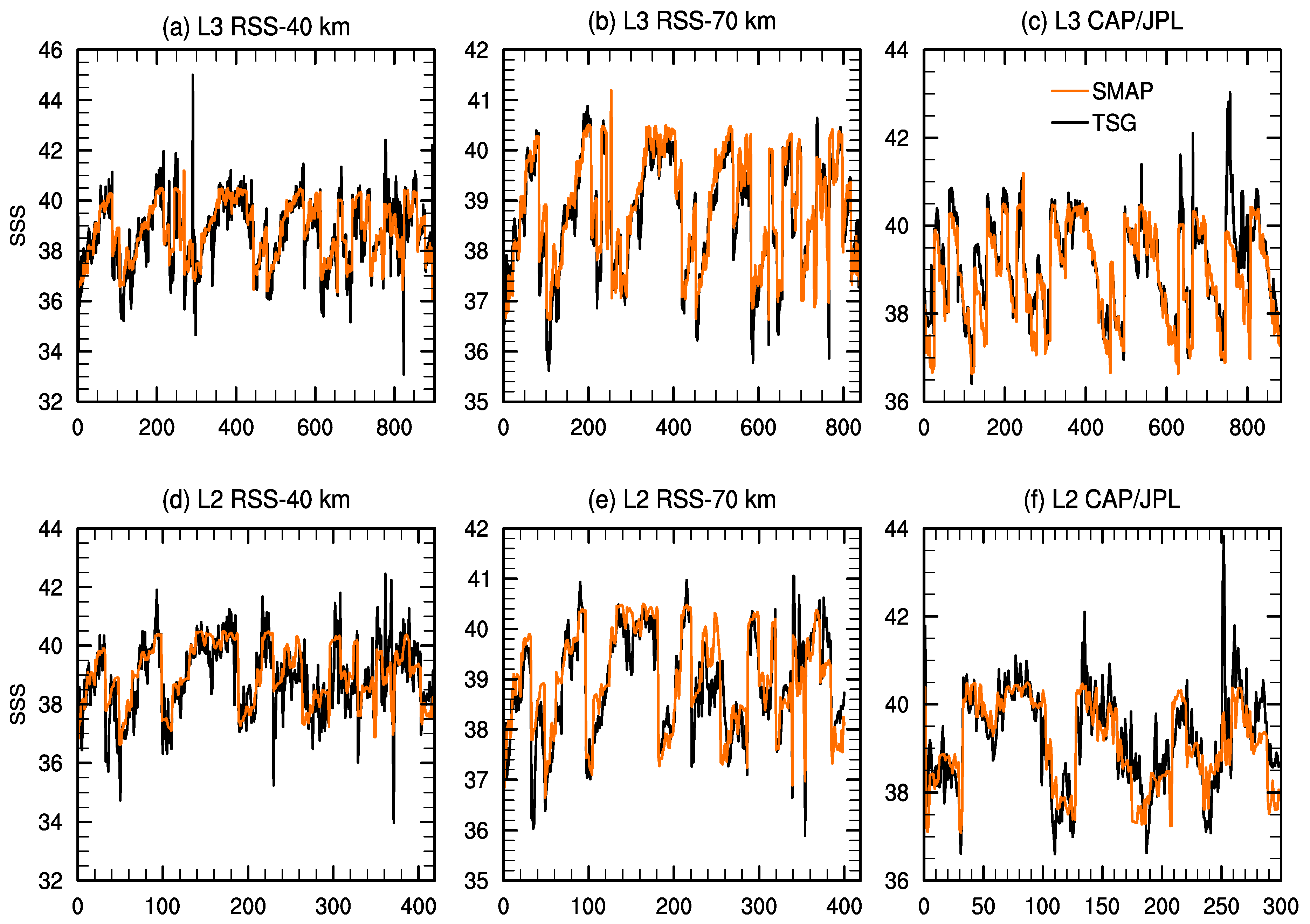
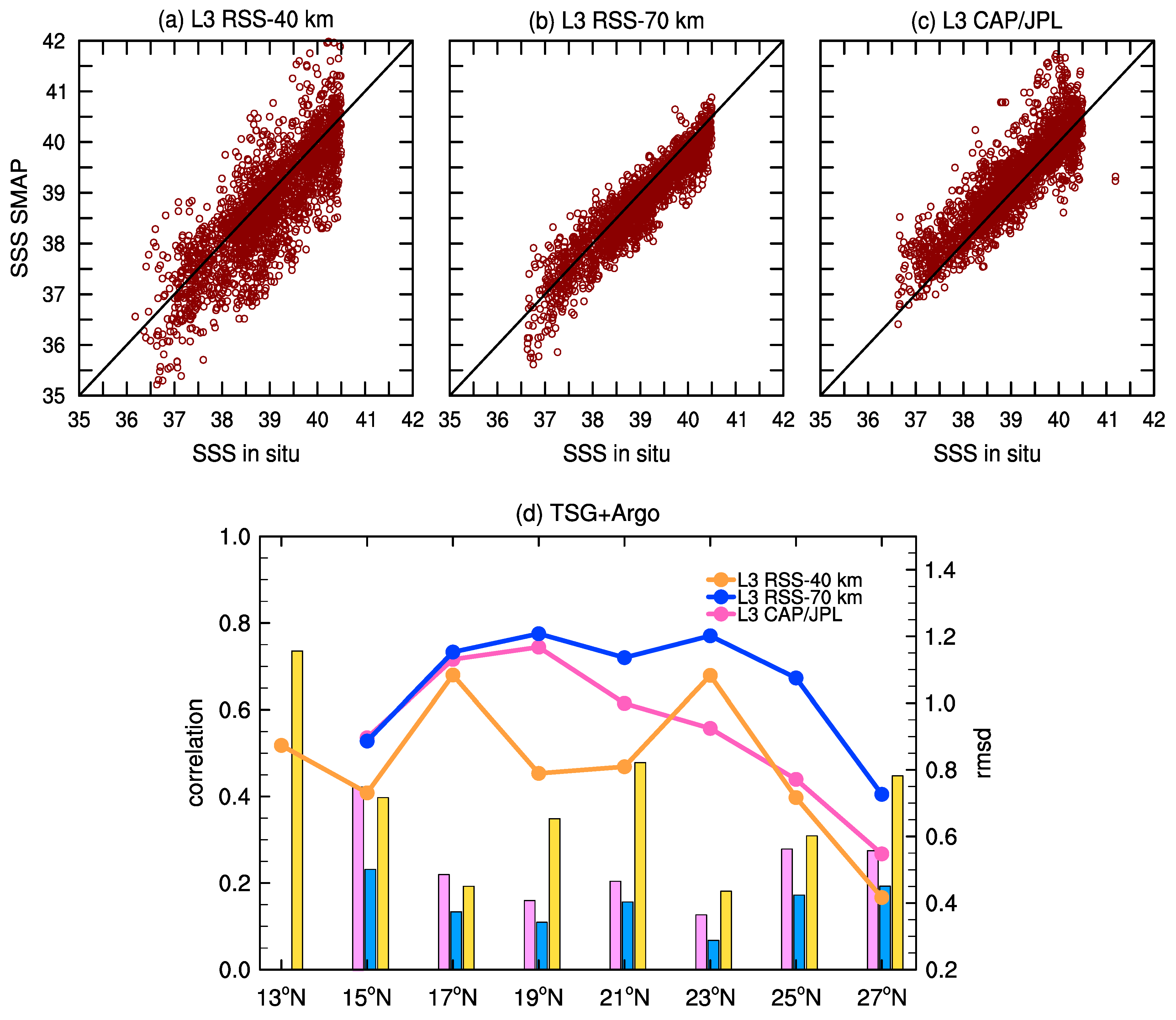
Tang et al. [
3], using a previous version of the L3 CAP/JPL product, described correlations of 0.78 (TSG and Argo) and
of 0.52/0.56 (TSG/Argo) over 18 months in the Mediterranean Sea. The present study, the first to evaluate SMAP in the Red Sea, found correlations to be even higher (0.88/0.85,
p-value < 0.001) and
even lower (0.59/0.46) for L3 CAP/JPL in the Red Sea. Note that the SMAP skill level in the Red Sea is indeed slightly better for the L3 RSS-70 km product (
Table 10).
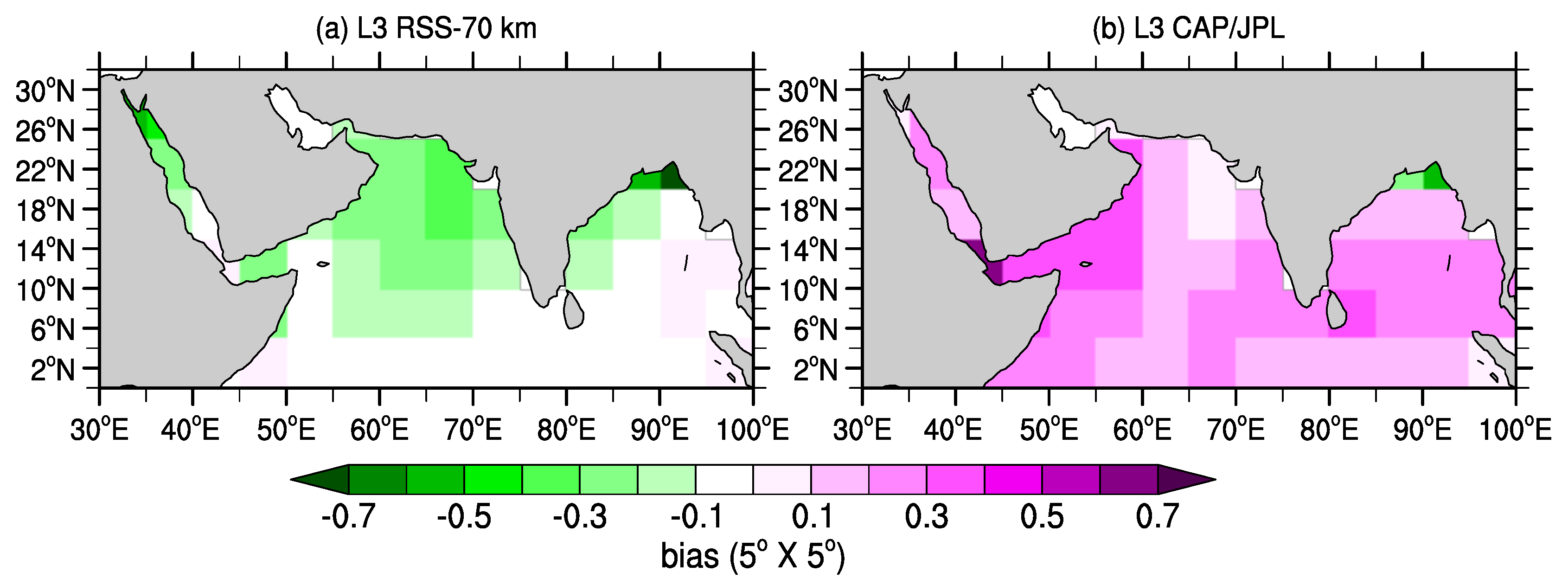
Different from the Mediterranean Sea, bias is consistent for a product series in the Red Sea, such as RSS products underestimate in situ SSS, and CAP/JPL ones overestimate it (independent if Argo or TSG observations are used for statistical comparison). In the Mediterranean Sea, bias is positive for the TSG and negative for Argo [
3], but that was for a previous SMAP version than the ones used here. Moreover, there is no outstanding offset in
Figure 14, such as in the Levantine area of the Mediterranean Sea (Figure 3a of Tang et al. [
17]).
Within the Red Sea, SMAP performance is reduced in the extreme north and south (
Figure 15), areas with less collocated data, and more prone to RFI and land contamination. Tang et al. [
3] also described spatial differences in SMAP performance in the Mediterranean Sea due to these factors.
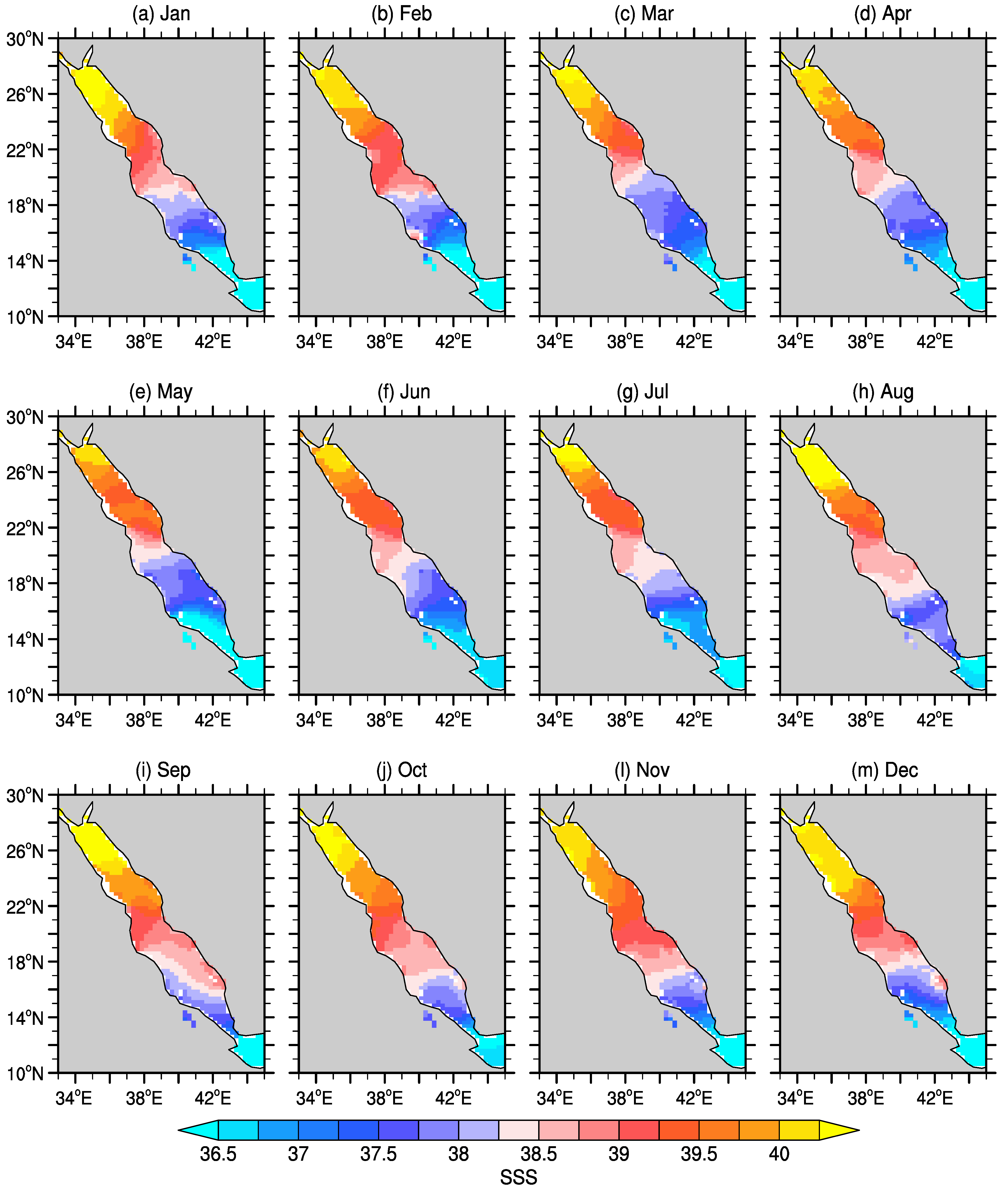
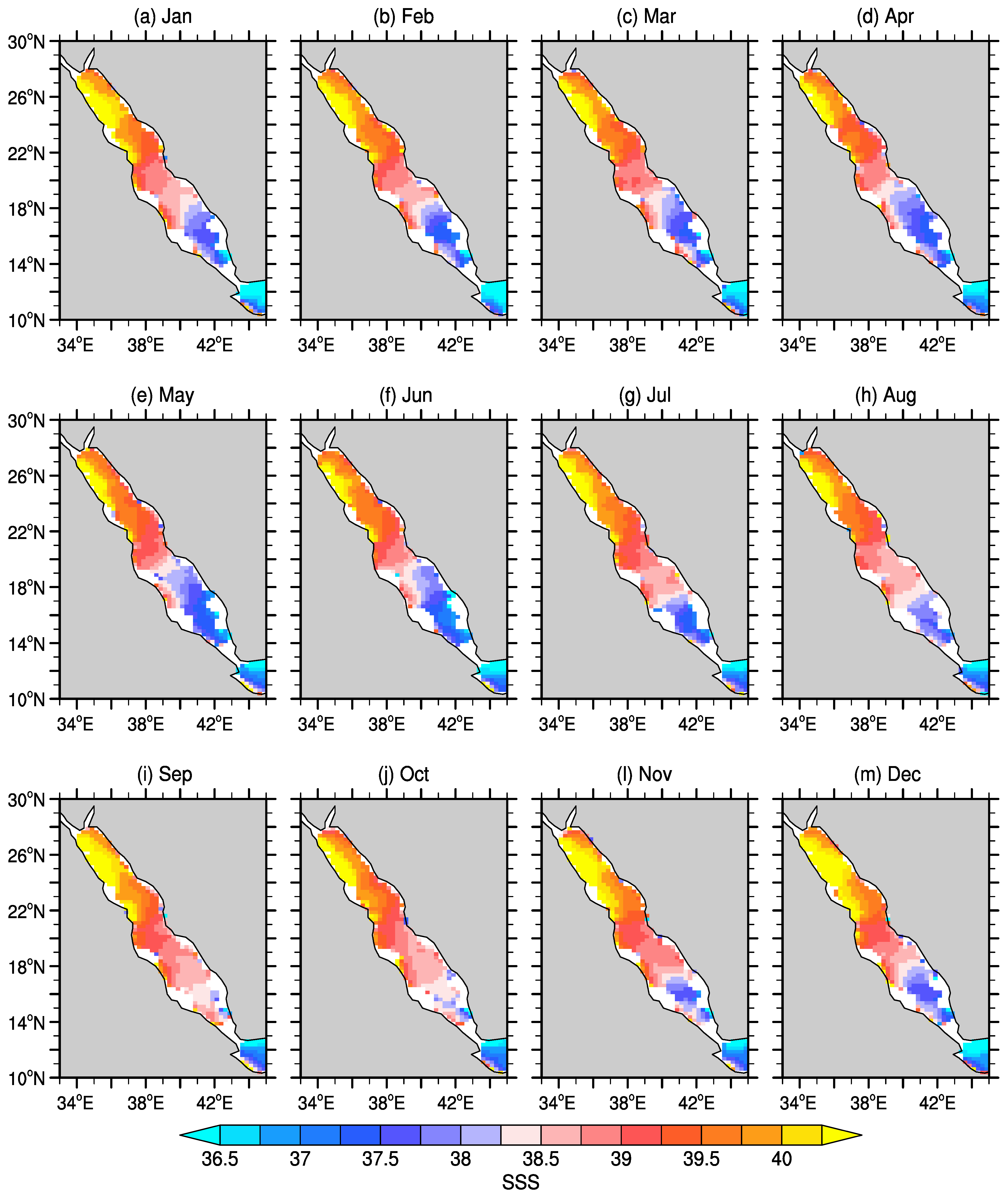
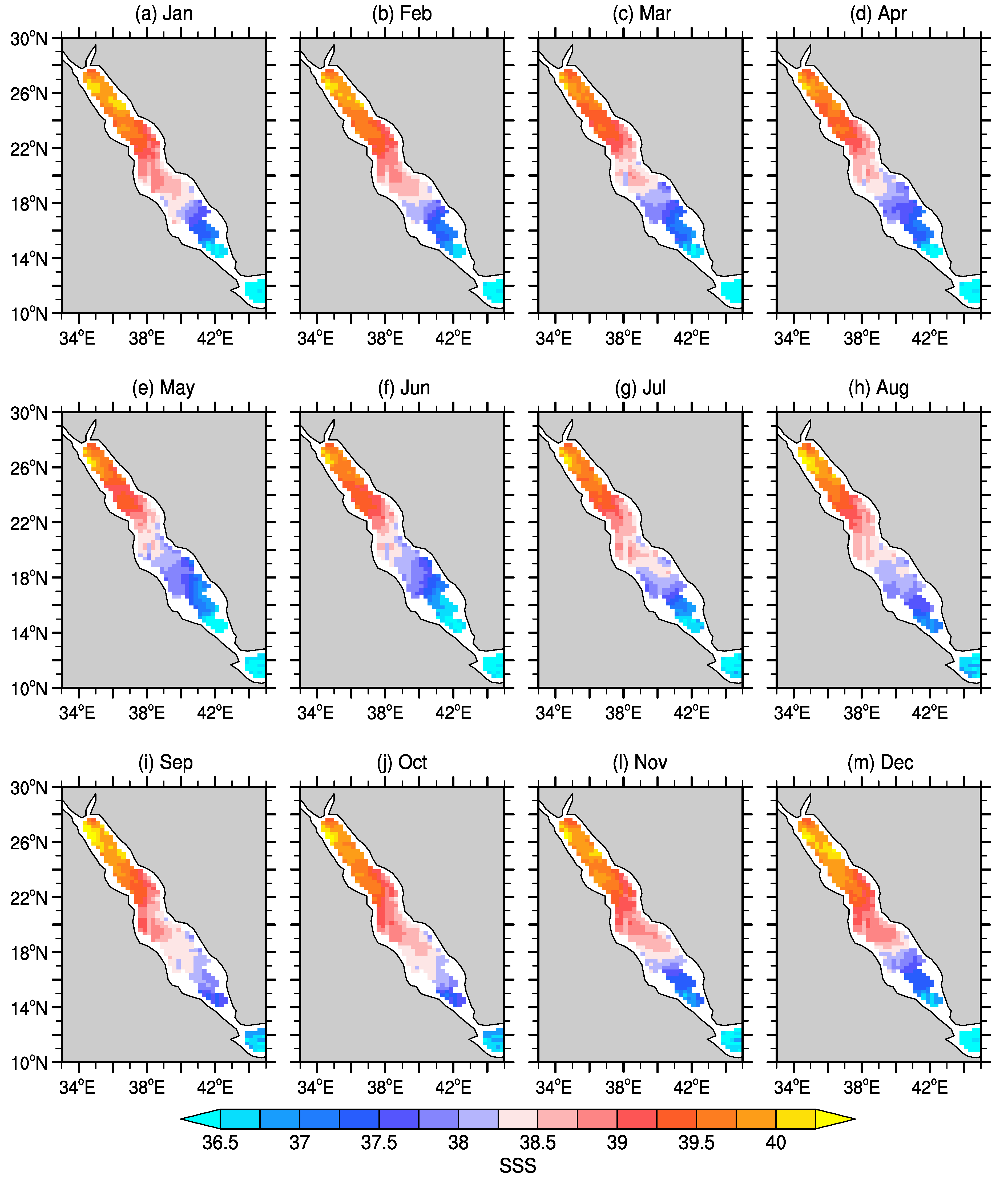
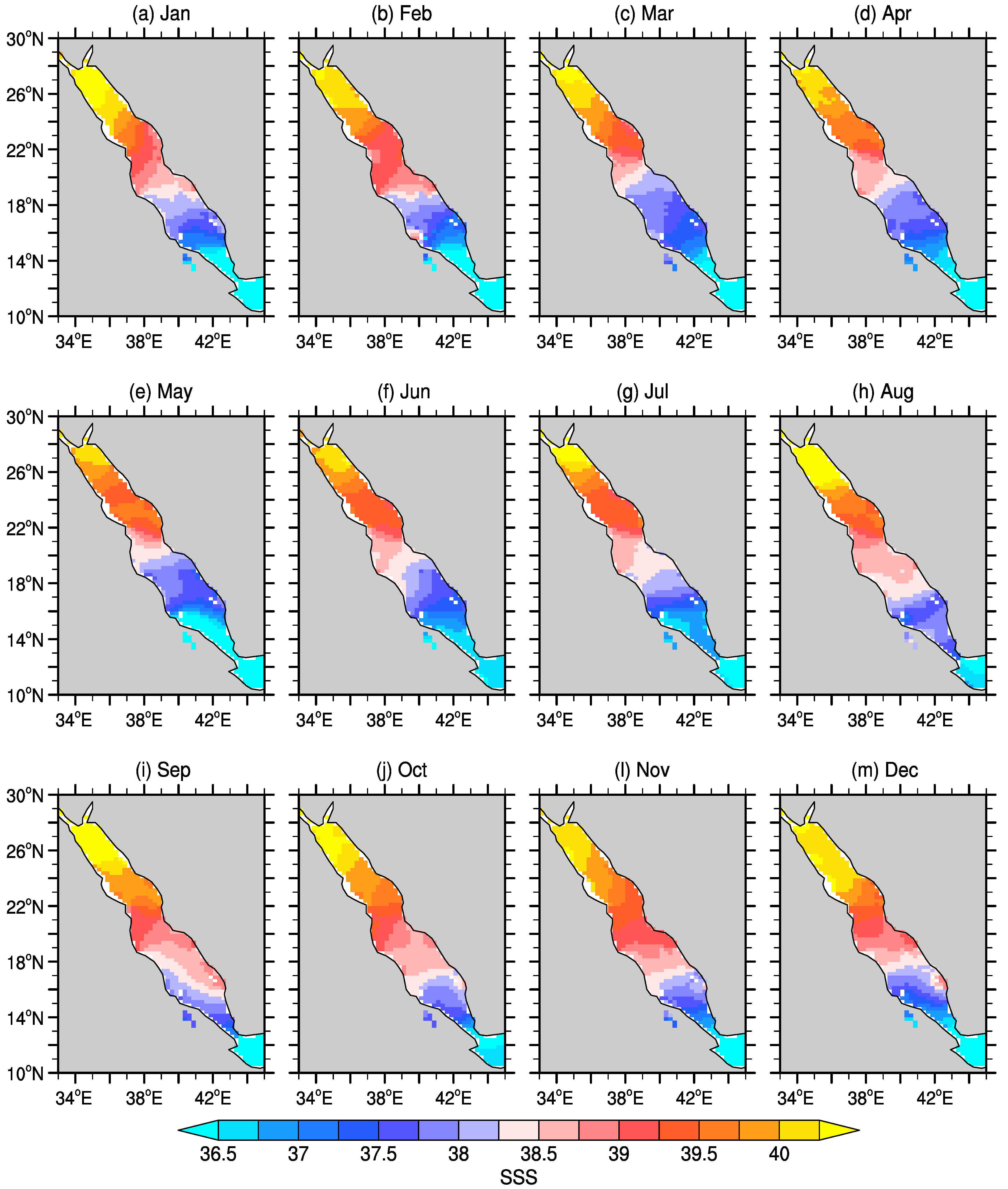
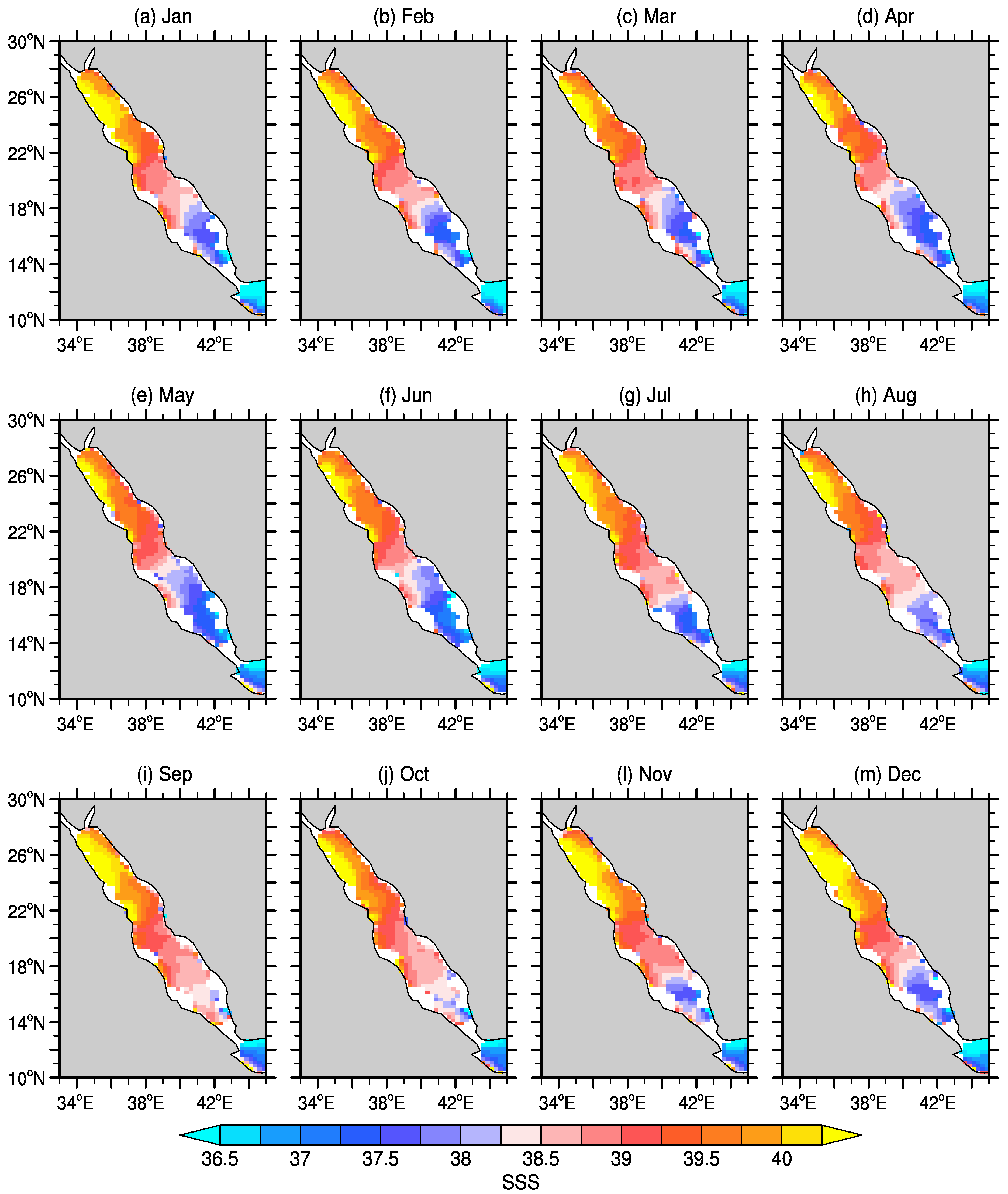
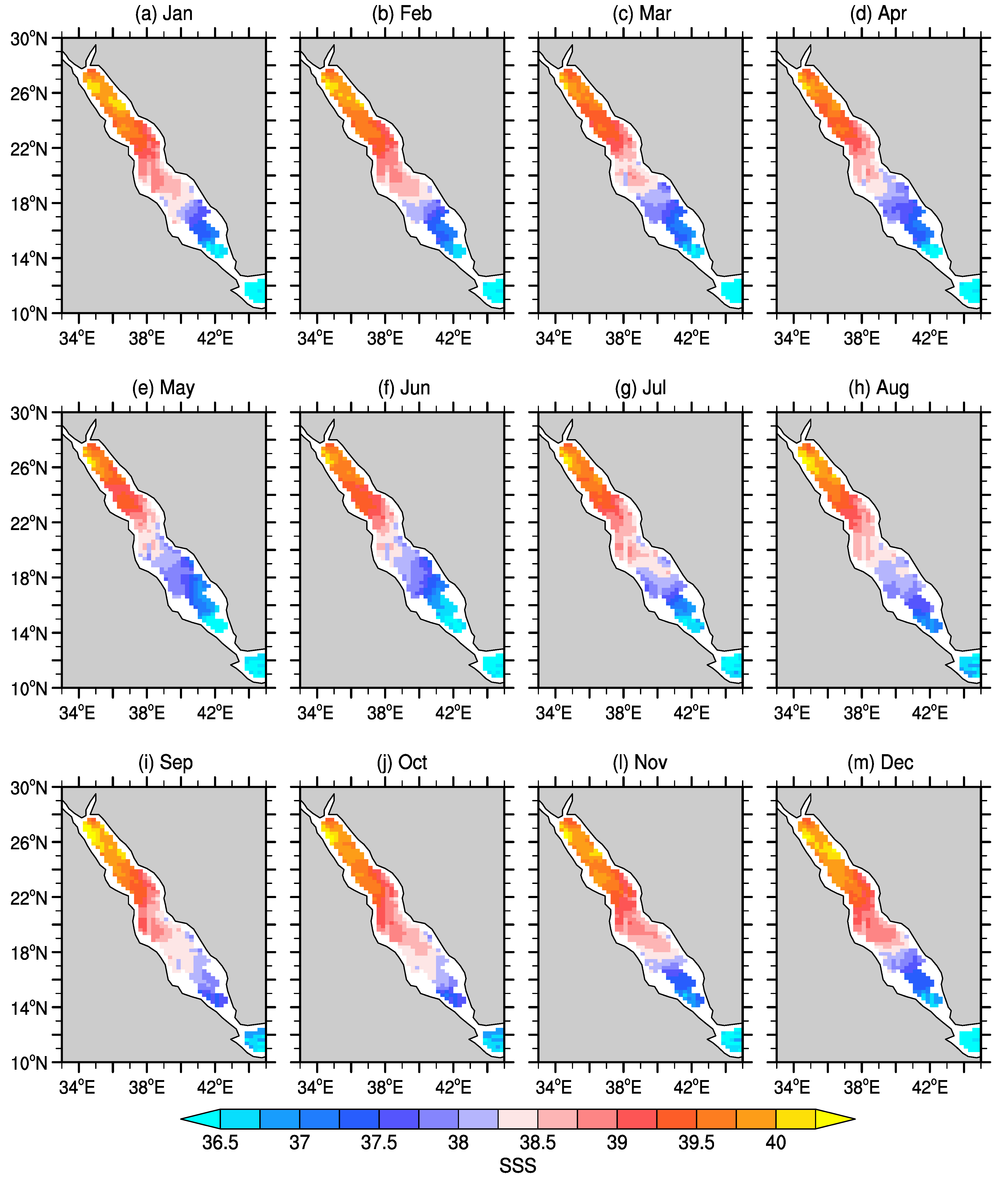
Seasonally, there is evidence that SMAP captures the intrusion of the fresher, colder, and nutrient-rich Gulf of Aden Surface Water (GASW) in winter [
48,
63]. Sofianos and Johns [
48] described GASW as a relatively fresh surface inflow with salinity around 36–36.5. This description is similar to what SMAP shows (
Figure 17 and
Figure 18). SMAP SSS climatological maps also resemble the numerical simulations of Sofianos and Johns [
54], with the eastern Red Sea slightly fresher than the western, especially north of 18°N (see also
Figure S2). The SMAP SSS pattern would be consistent with the existence of a northward surface Eastern Boundary Current bringing warm and relatively fresh waters to the north, as described by Bower and Farrar [
22]. However, the zonal difference in SMAP maps should be interpreted with caution given the moderate spatial resolution of the satellite, and possible RFI and land contamination. WOA18 does not show a clear zonal pattern in salinity, but its mapping scales are too wide. In conclusion, more work needs to be done to ensure that the SMAP zonal pattern is not an artifact due to RFI and land contamination.
The SMAP results in the Red Sea presented here are promising, particularly when they are contrasted with other marginal seas. For instance, Vazquez-Cuervo et al. [
16] found correlations of 0.61–0.91 (except by one mooring in which correlation was around 0.3) and
of 0.4–0.78 in the much wider Gulf of Mexico for the L3 SMAP products they analyzed. These numbers are the same order as those described here for the narrow Red Sea.
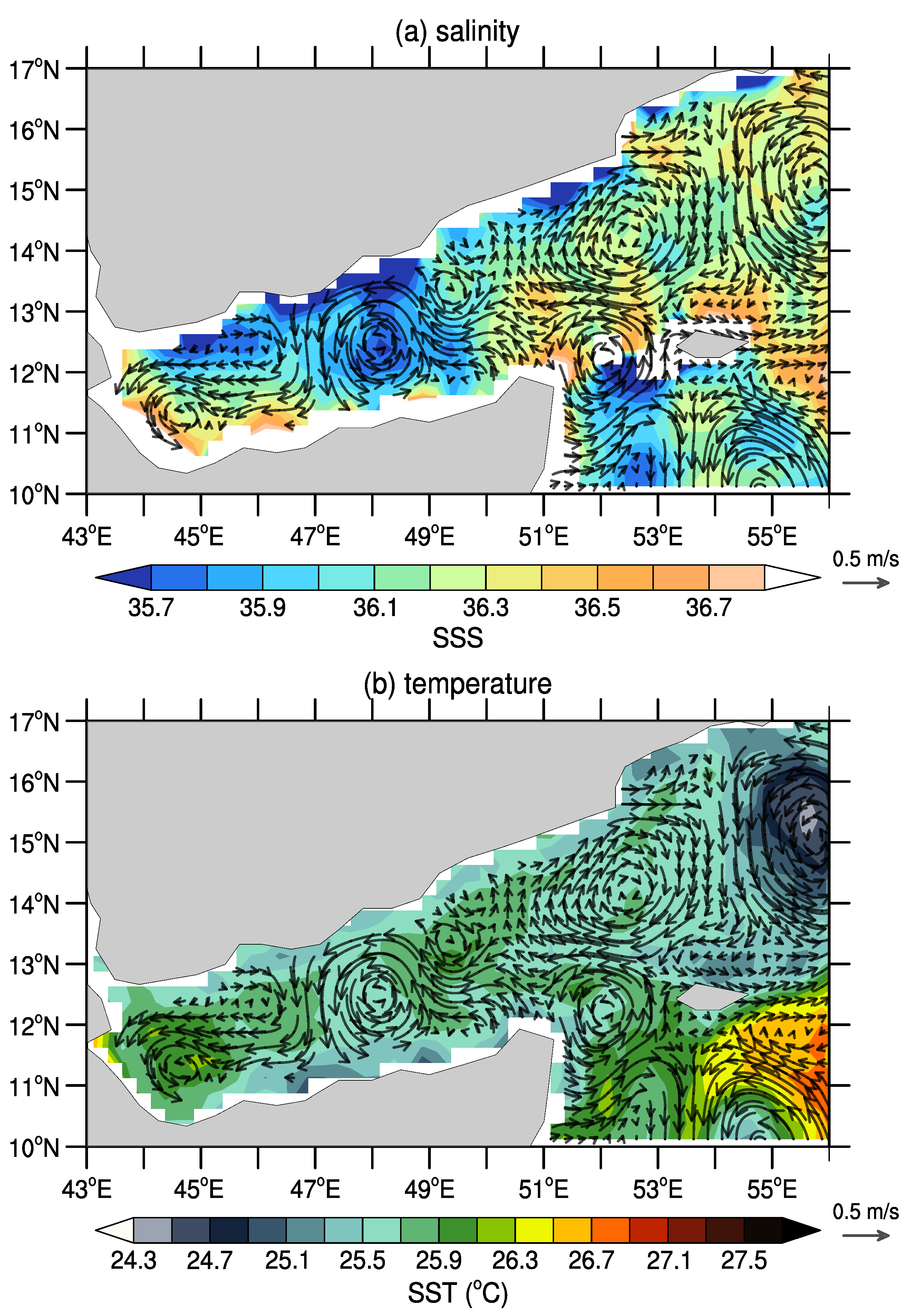
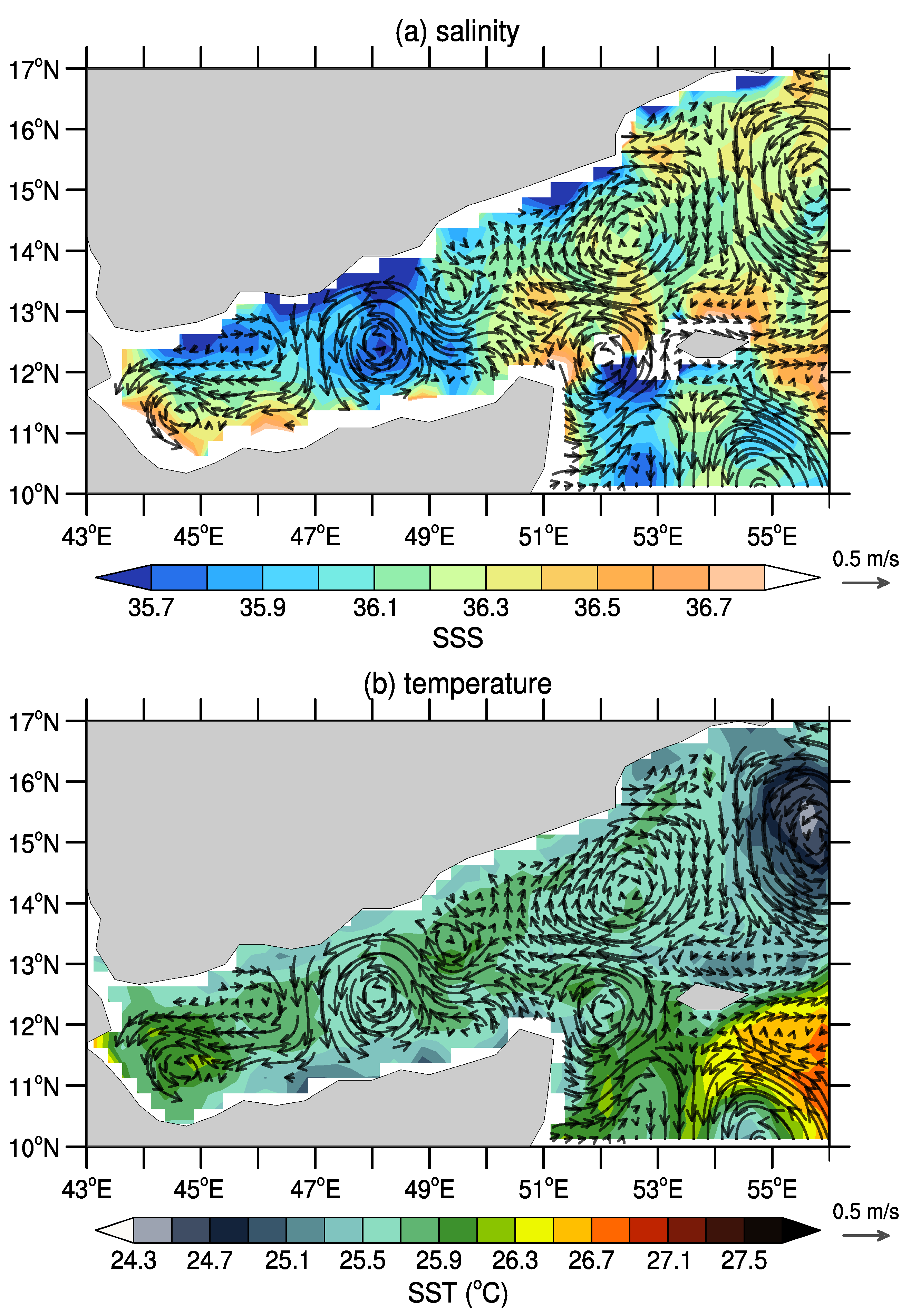
In the Gulf of Aden and Oman, SMAP performance is worse than that in the Red Sea, probably because RFI effects are more severe in the southward part of the Arabian Peninsula, although this study did not evaluate that. Despite this limitation, SMAP seems to capture signatures from mesoscale eddies in the Gulf of Aden. For instance,
Figure 19 shows SSS and satellite-based sea-surface temperature (SST) fields for a random day in February 2019, overlaid with multisatellite altimetric geostrophic currents. Note that these datasets do not accurately represent the same period. A cyclonic (anticlockwise) eddy centered at 48°E and 12°N within the Gulf of Aden has a low salinity and temperature signature when compared with its surroundings. Mesoscale eddies are a crucial component of the Gulf of Aden dynamics, affecting Red Sea Overflow Water properties and the Gulf’s biogeochemistry [
23,
29,
63,
64]. Other agreements also exist in maps between mesoscale features, SSS and SST. However, new investigations are required before it can be ruled that SMAP is capturing mesoscale eddies in the Gulf of Aden, but these initial results are promising.
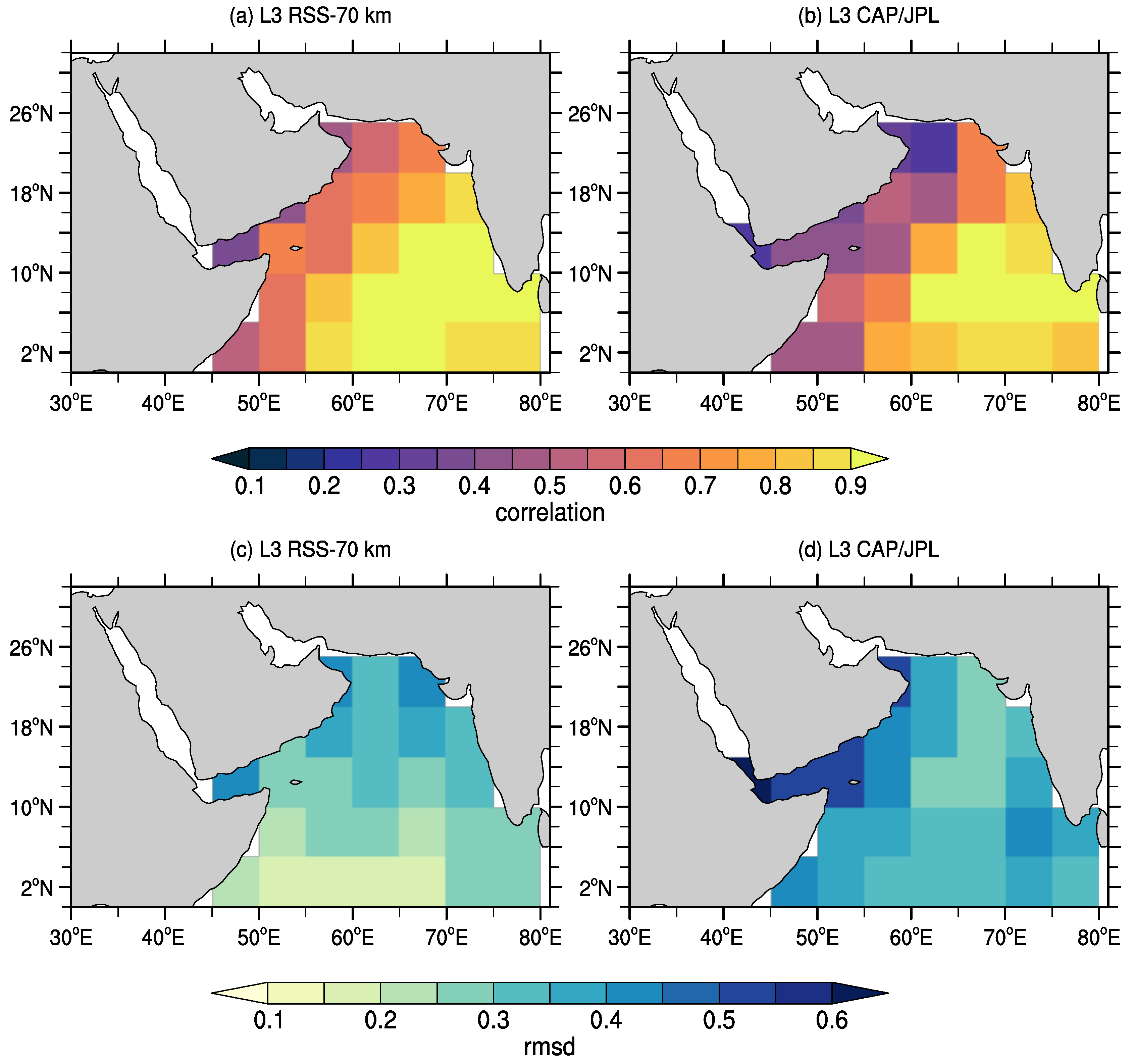
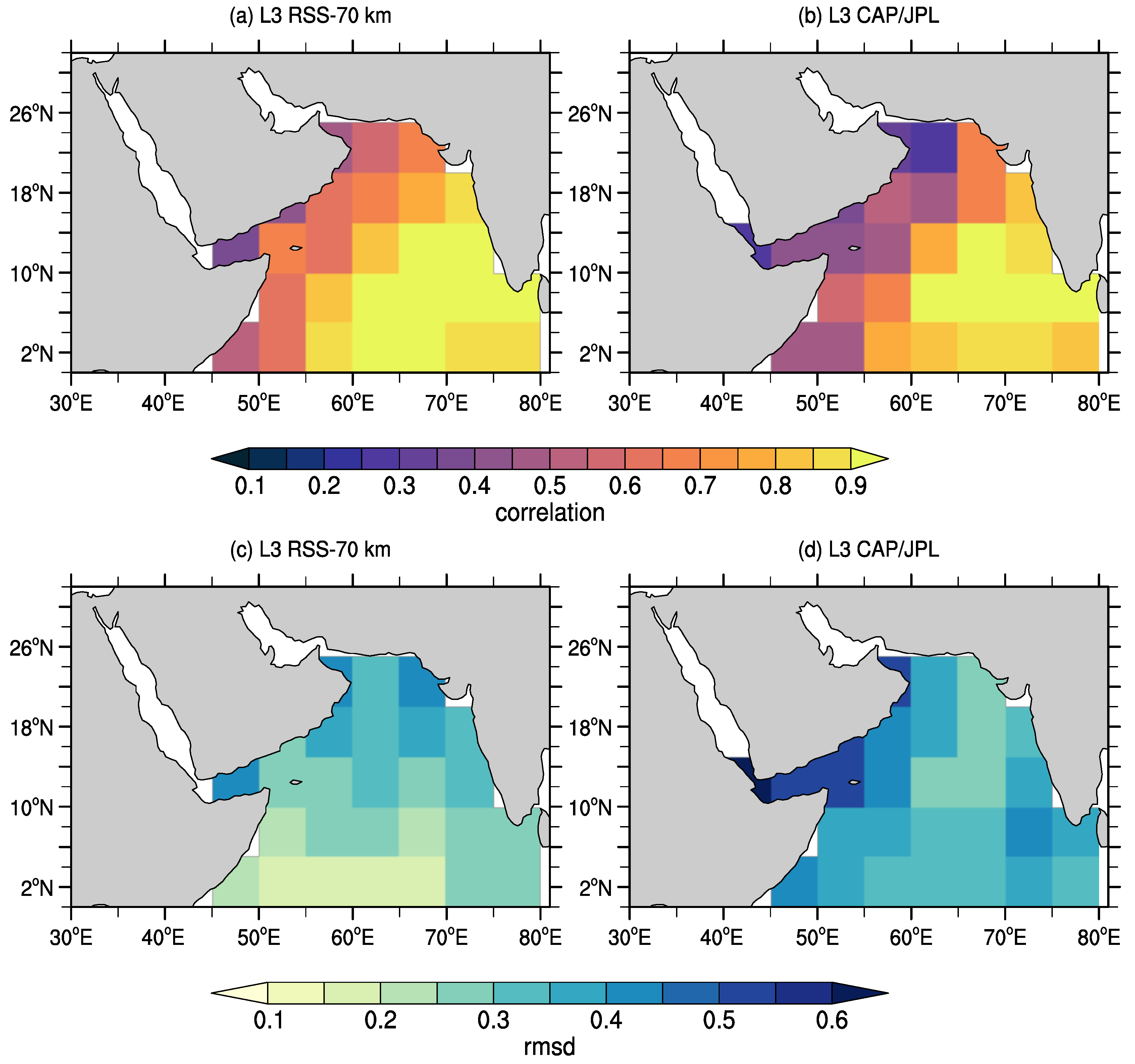
Within the Arabian Sea, there is a consistent improvement in SMAP statistical skills from the west, where the Gulfs of Aden and Oman are, to the east (
Figure 8). Offshore the western boundary, all products show that SMAP captures SSS in the Arabian Sea with similar performance to the global evaluations [
3,
8], in which correlation in open water away from the coast is above 0.7 and
was less than 0.2
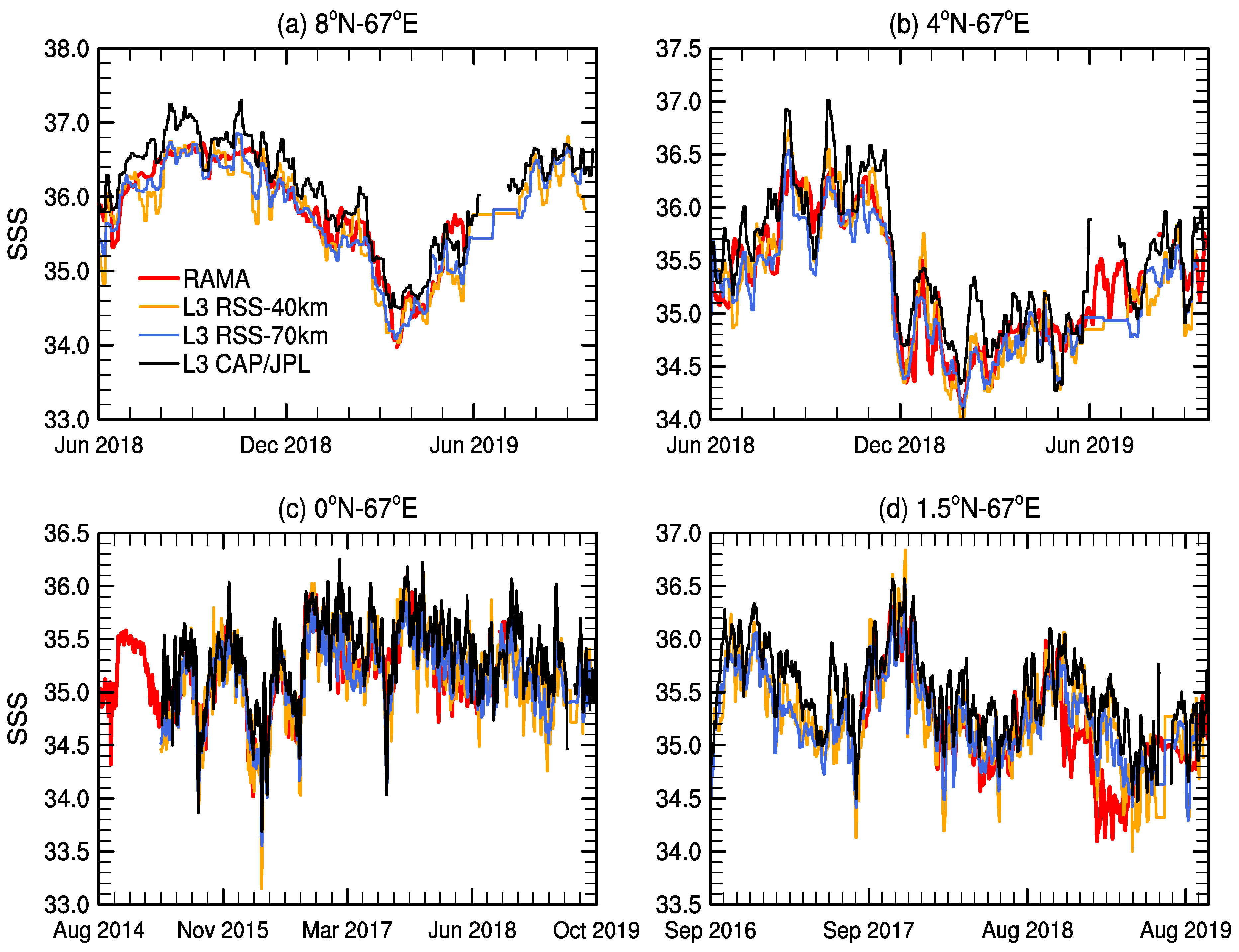
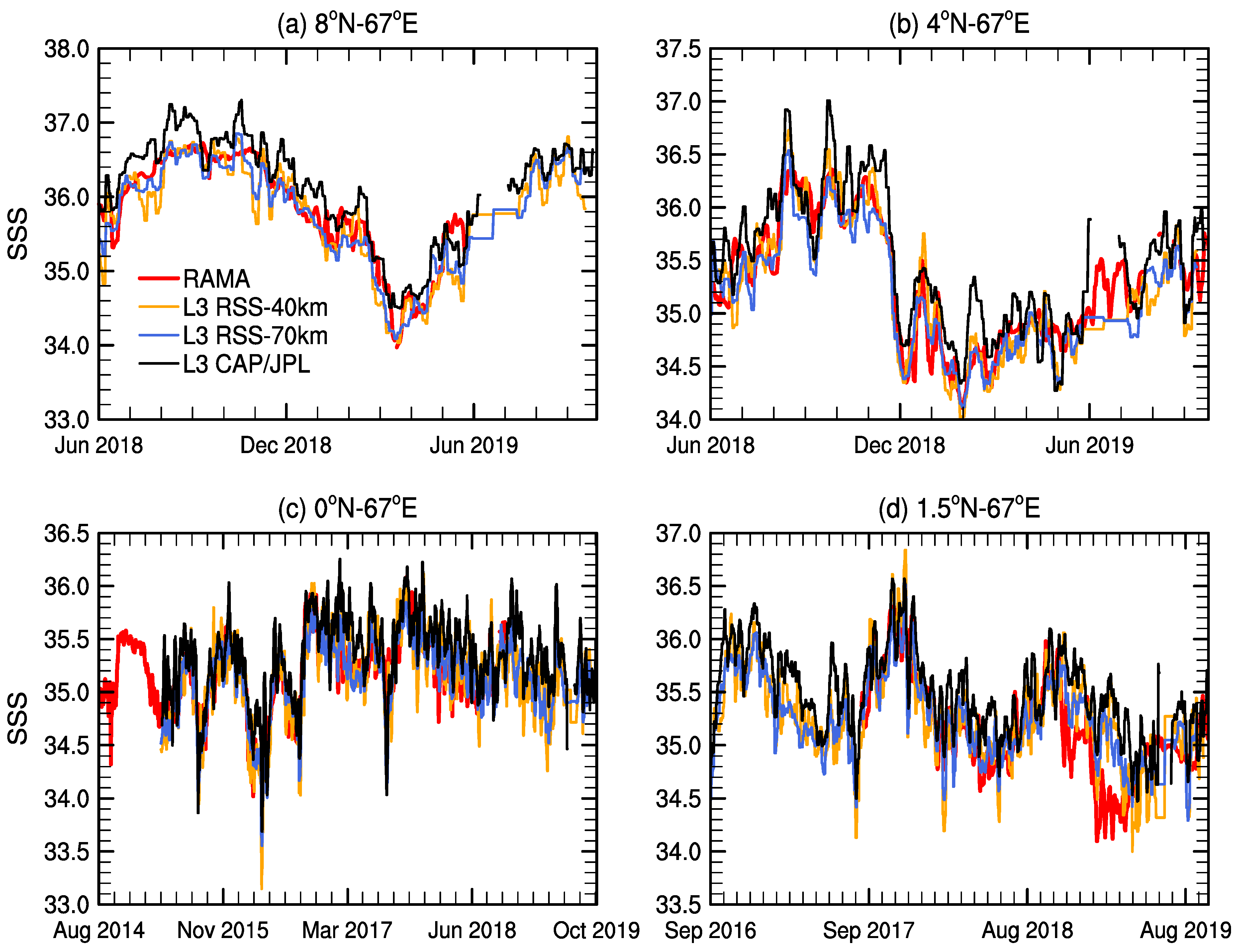
In the temporal domain, SMAP also reproduces the seasonal and subseasonal variability as measured by the RAMA array. Data from the RAMA array have also been previously used to validate SMAP [
3], but at that time (April 2015–September 2016), there was no mooring outside the equatorial zone in the Arabian Sea. For the equatorial buoys in the western Indian Ocean, Tang et al. [
3] found a high correlation (>0.7) and relatively low
(≈0.25). Here, statistics of the newest L3 CAP/JPL version over a much longer period (four years) are similar, with a correlation of 0.76 (0°N; 67°E) and 0.84 (1.5°N; 67°E), and
of 0.30 and 0.28, respectively. For the two moorings later deployed at 4°N and 8°N, correlations are even higher (
Table 5).
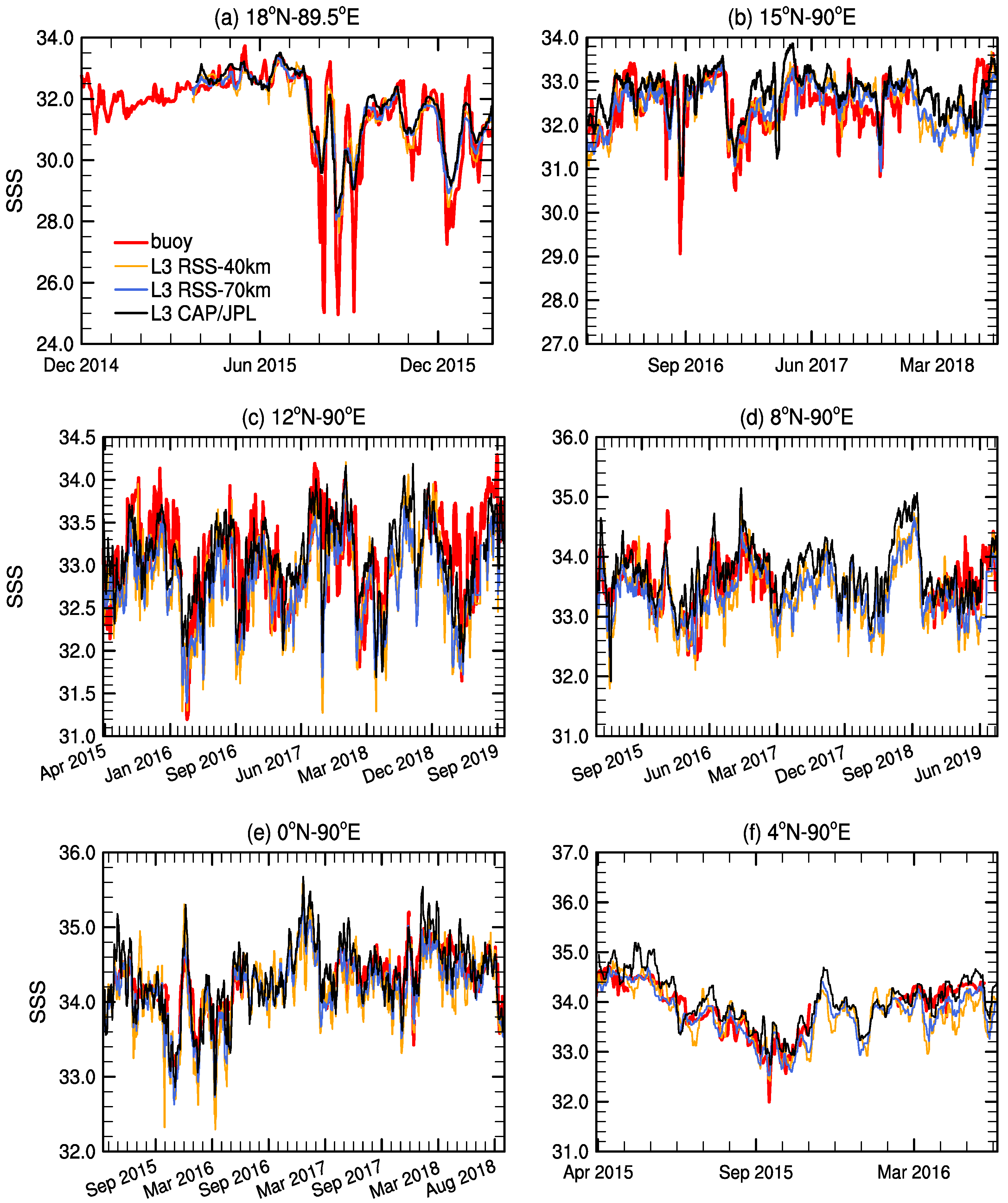
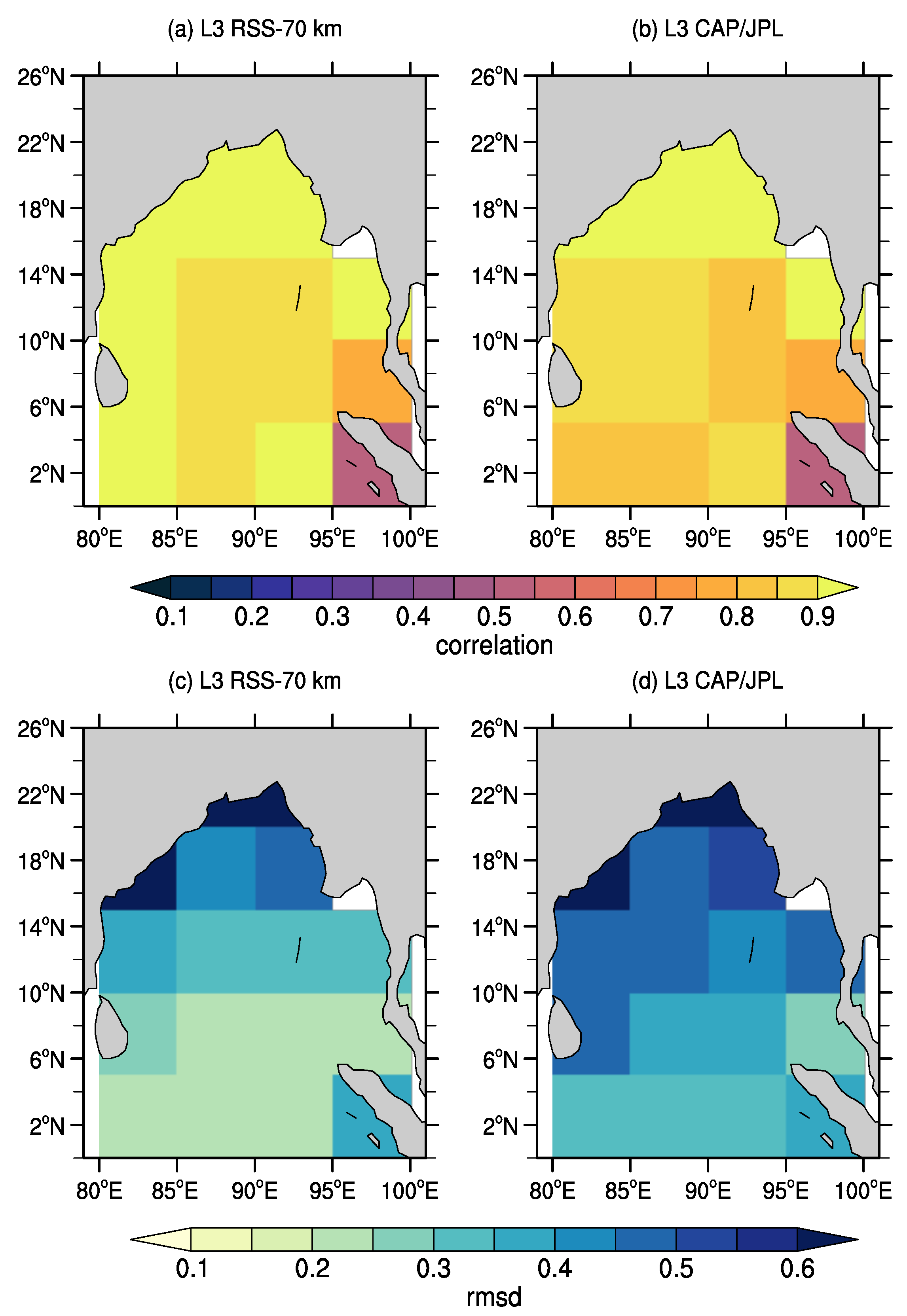
In the Bay of Bengal, statistics between the RAMA array and the CAP/JPL product follow a similar pattern, as shown in Tang et al. [
3] (their Figure 8), with correlation decreasing and
increasing northward (
Table 9). However, the spatial pattern from Argo does not show this northward worsening in SMAP retrieval (
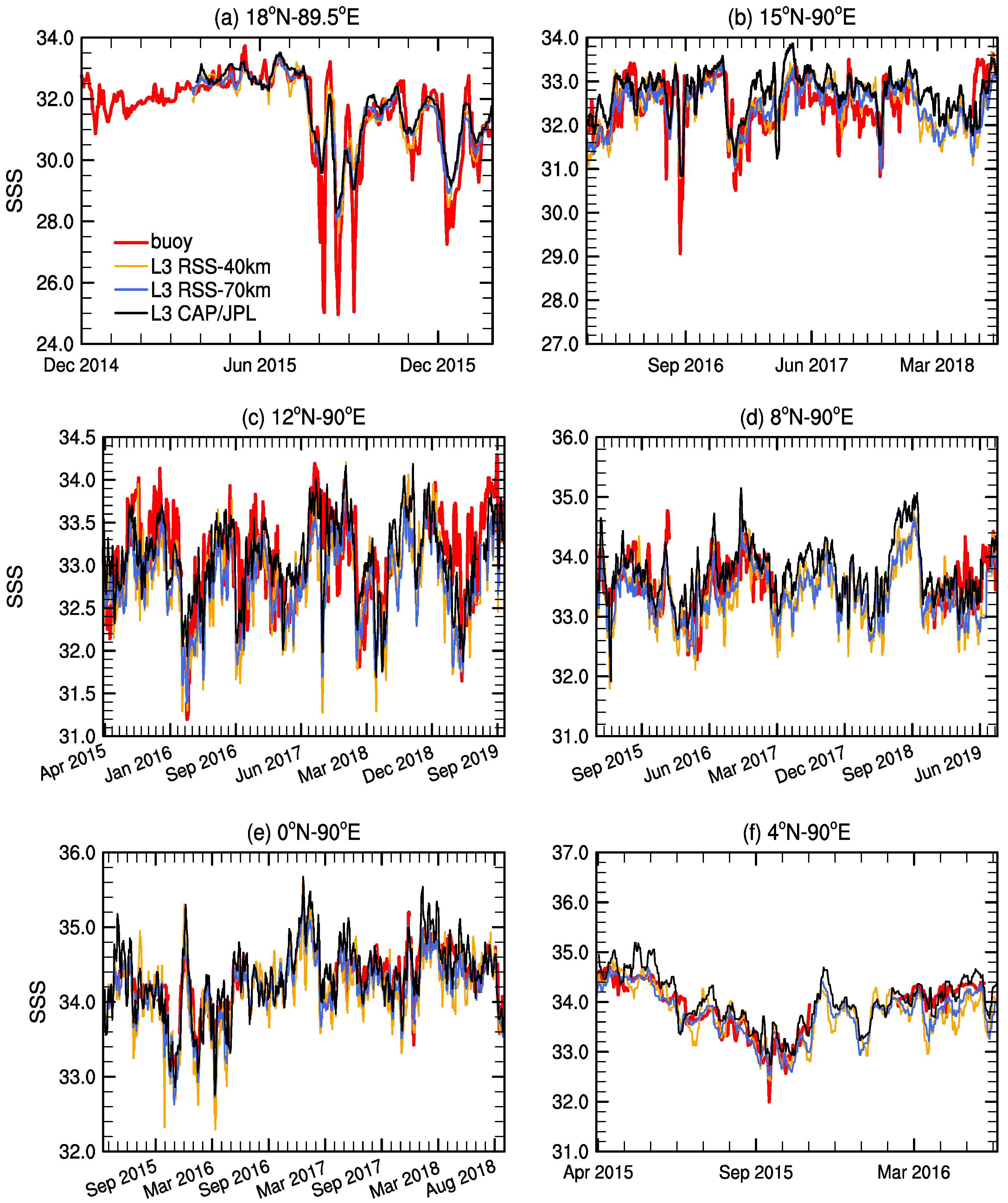
Figure 12). When compared with Argo, SMAP statistics are indeed better northward. As a point of fact, SMAP SSS is highly correlated (0.87–0.89) with observations at the WHOI mooring located in the northern part of the bay (18°N), with SMAP in-phase and capturing the timing of the intense drops in salinity measured at the buoy, although without the same intensity (
Figure 13a).
Fournier et al. [
18] compared a previous version of L3 CAP/JPL SMAP and all in situ SSS observations in the Bay of Bengal available at the World Ocean Database (which include Argo floats) between April 2015 and December 2016. In their 1.5 years collocated dataset, the correlation was 0.83,
0.49, and there was a positive bias of 0.1. For the new version shown here and over four years, correlation is 0.95,
is more or less the same (0.44), but the positive bias is 0.2. However, the in situ data used as ground truth in both works are not quite the same.
5. Conclusions
The present study assessed SMAP SSS retrievals in the North Indian Ocean, particularly in the Arabian Sea and the Red Sea. The wide range of salinity of the North Indian Ocean, with SSS of less than 30 in the Bay of Bengal to more than 40 in the Red Sea, was attractive for evaluating the performance of the new SMAP versions in relation to in situ SSS. For this task, this work put together almost all in situ SSS observations publicly available over the SMAP era, which included Argo floats, TSG, ship-based CTD, and time series from moored buoys.
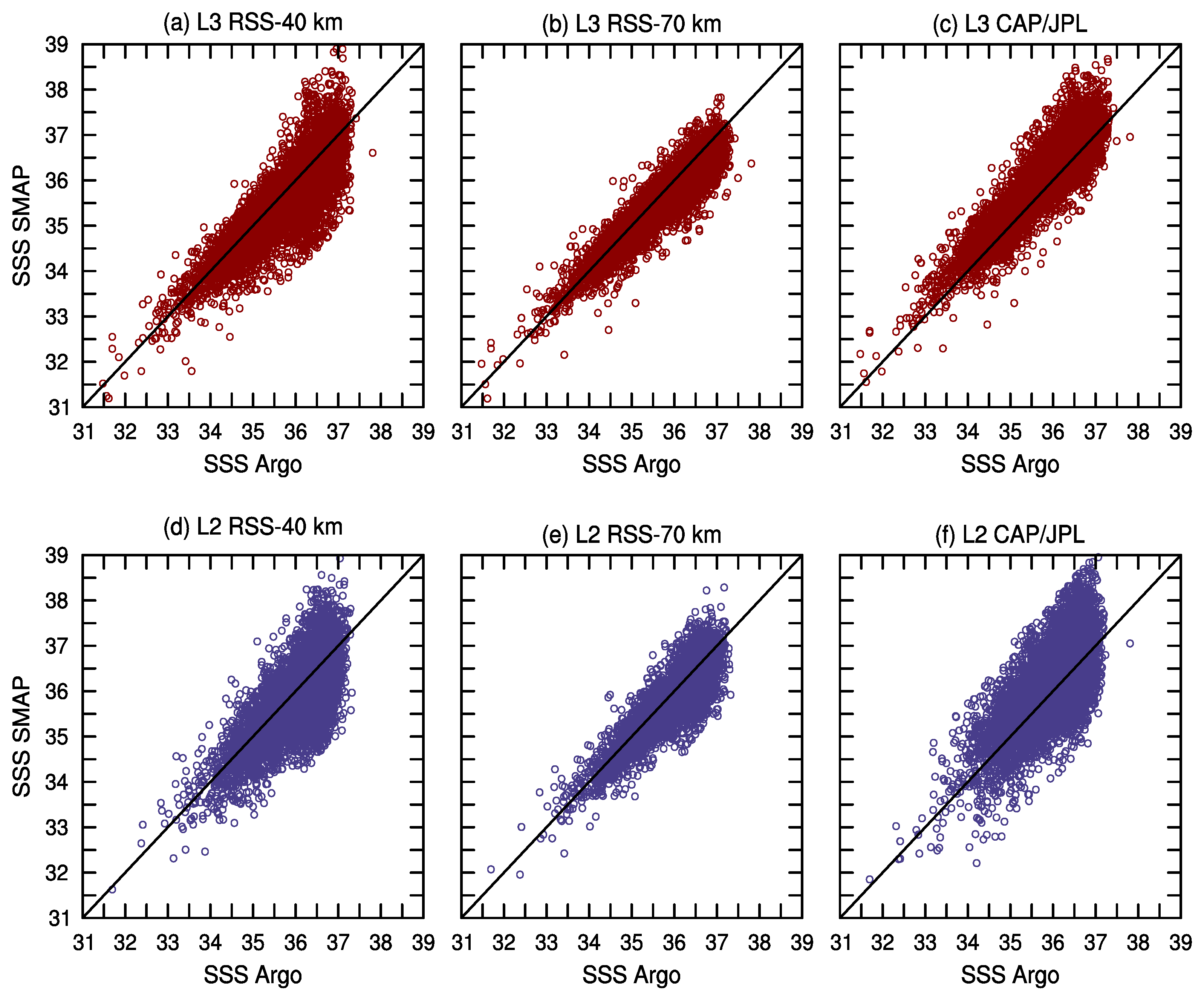
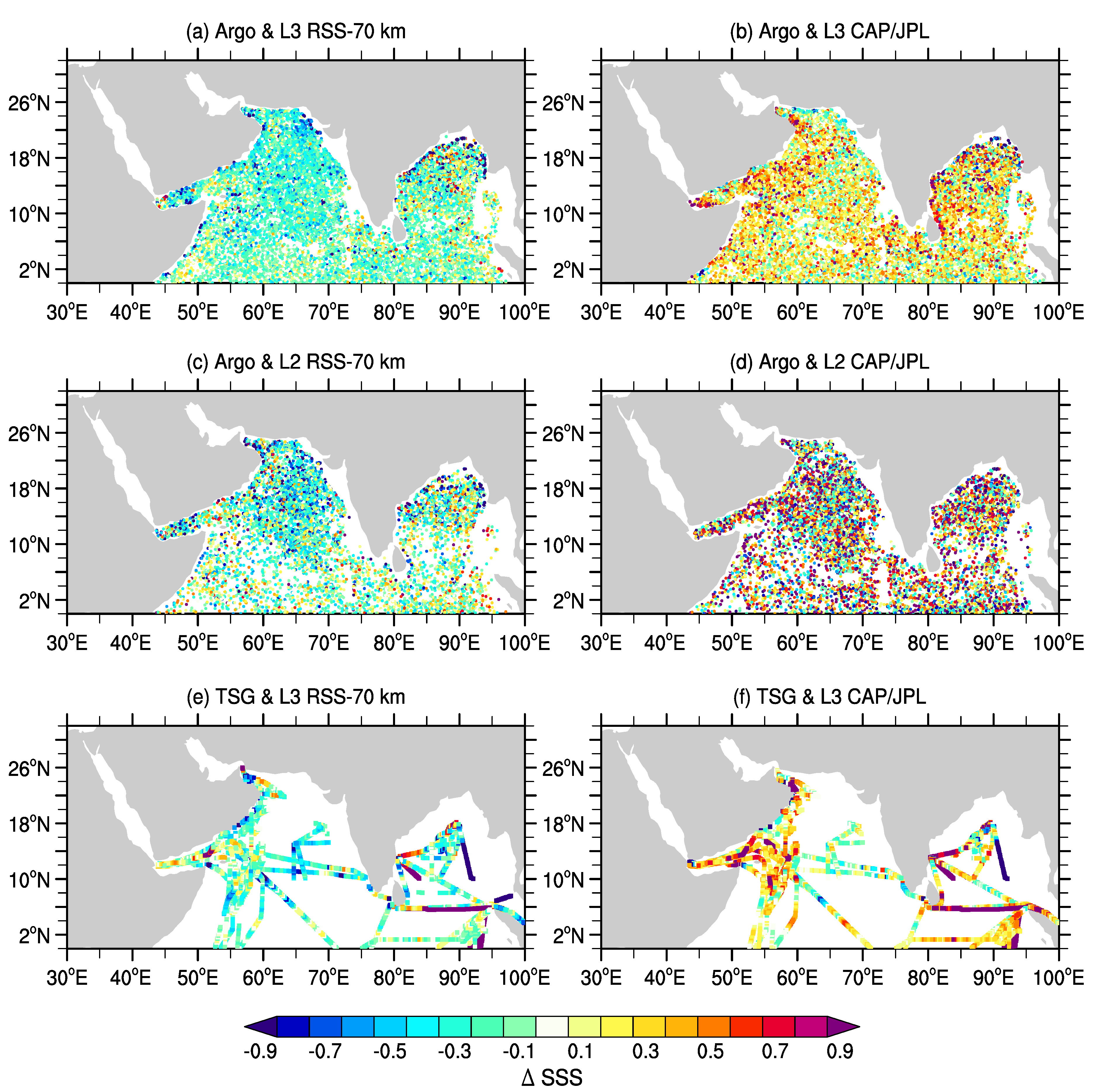
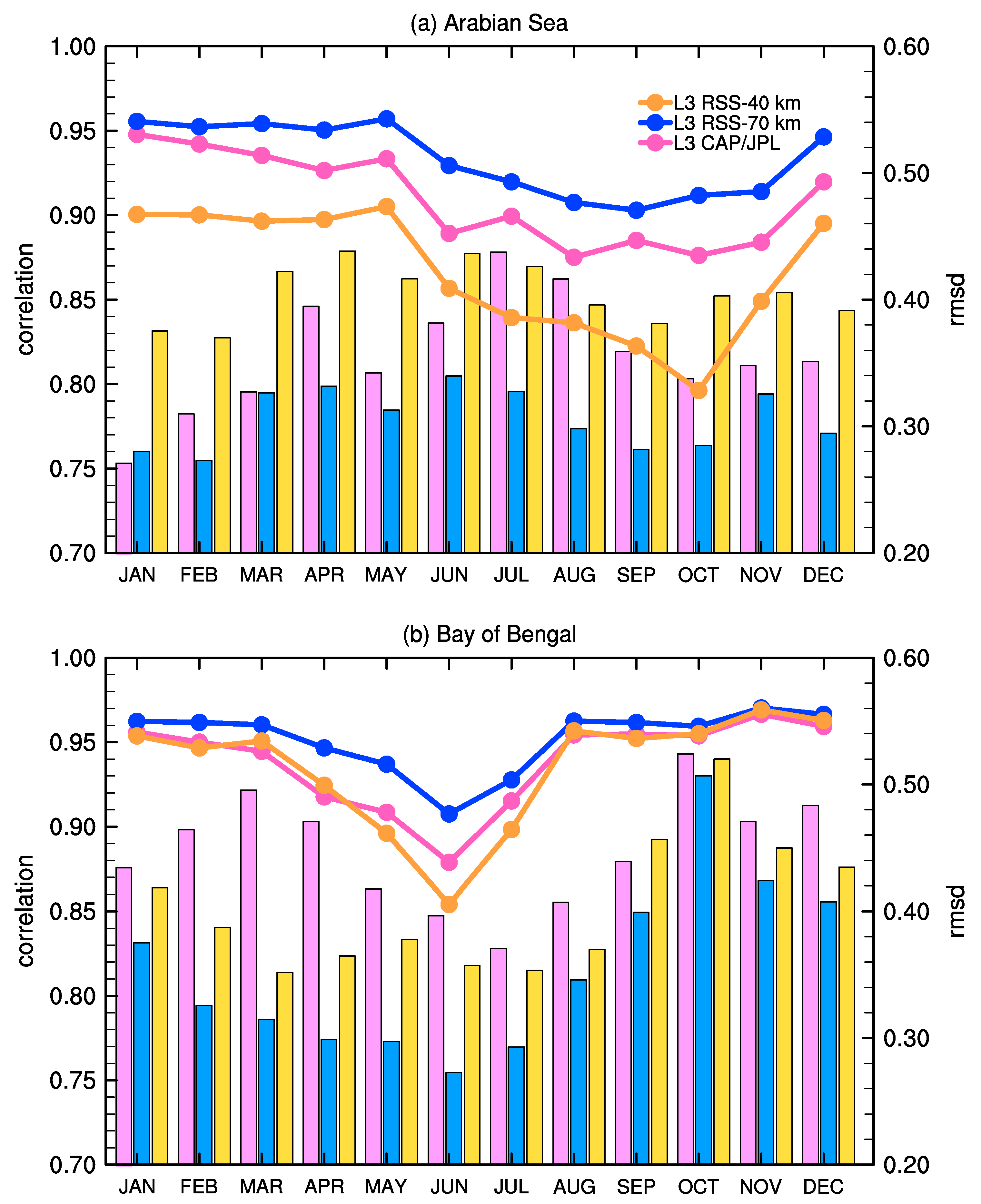
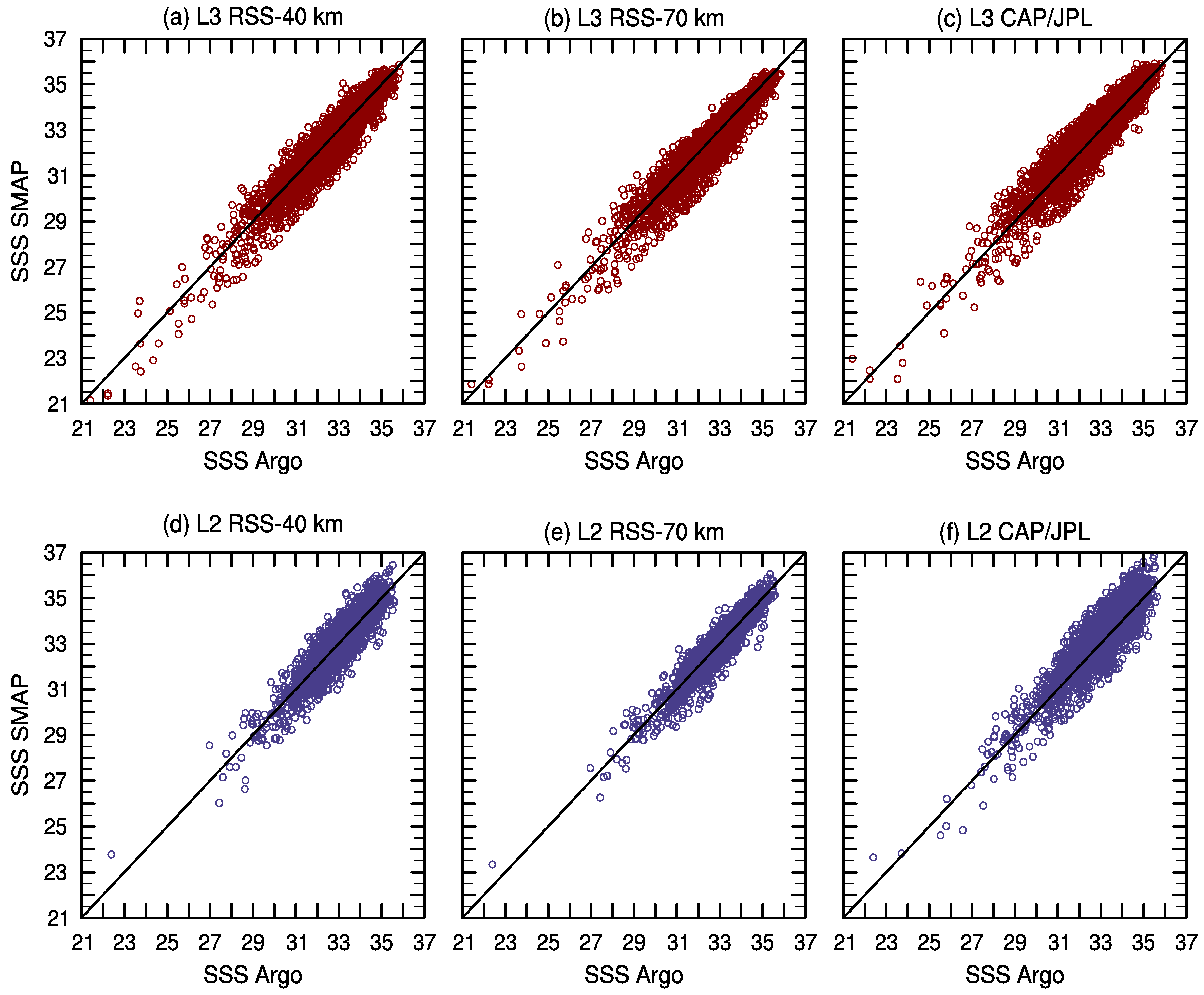
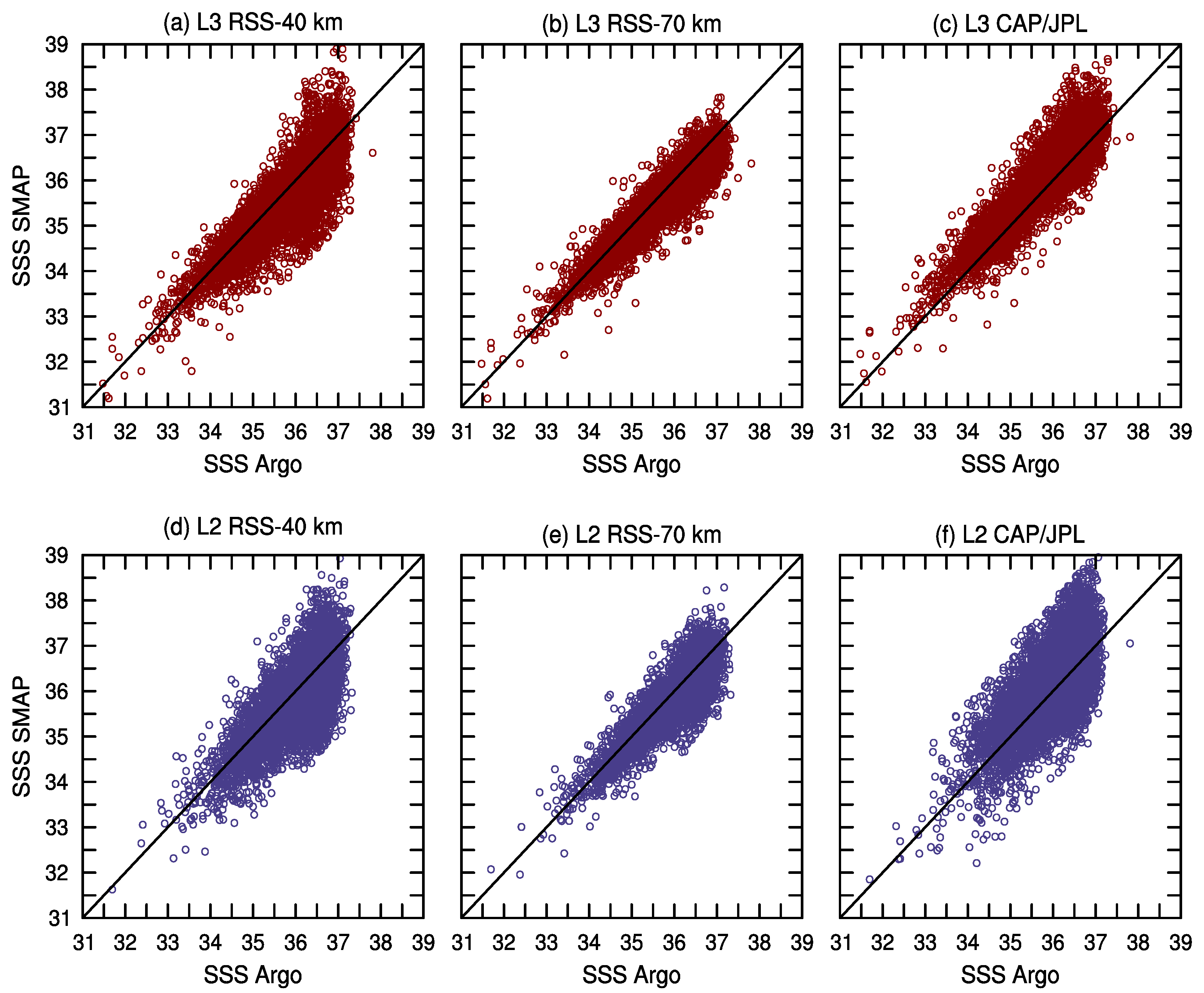
Overall, SMAP reproduces SSS relatively well with a high signal-to-noise ratio, in both the Arabian Sea and the Bay of Bengal, with correlation increasing, and decreasing with spatial smoothing. Thus, CAP/JPL, with an effective spatial resolution of 60 km, tended to have a better performance than that of the RSS-40 km product, and slightly worse than that of the RSS-70 km. Similar improvement was observed when SMAP data is averaged over time, with the correlation being generally lower and higher for L2 products when contrasted with the respective L3 datasets.
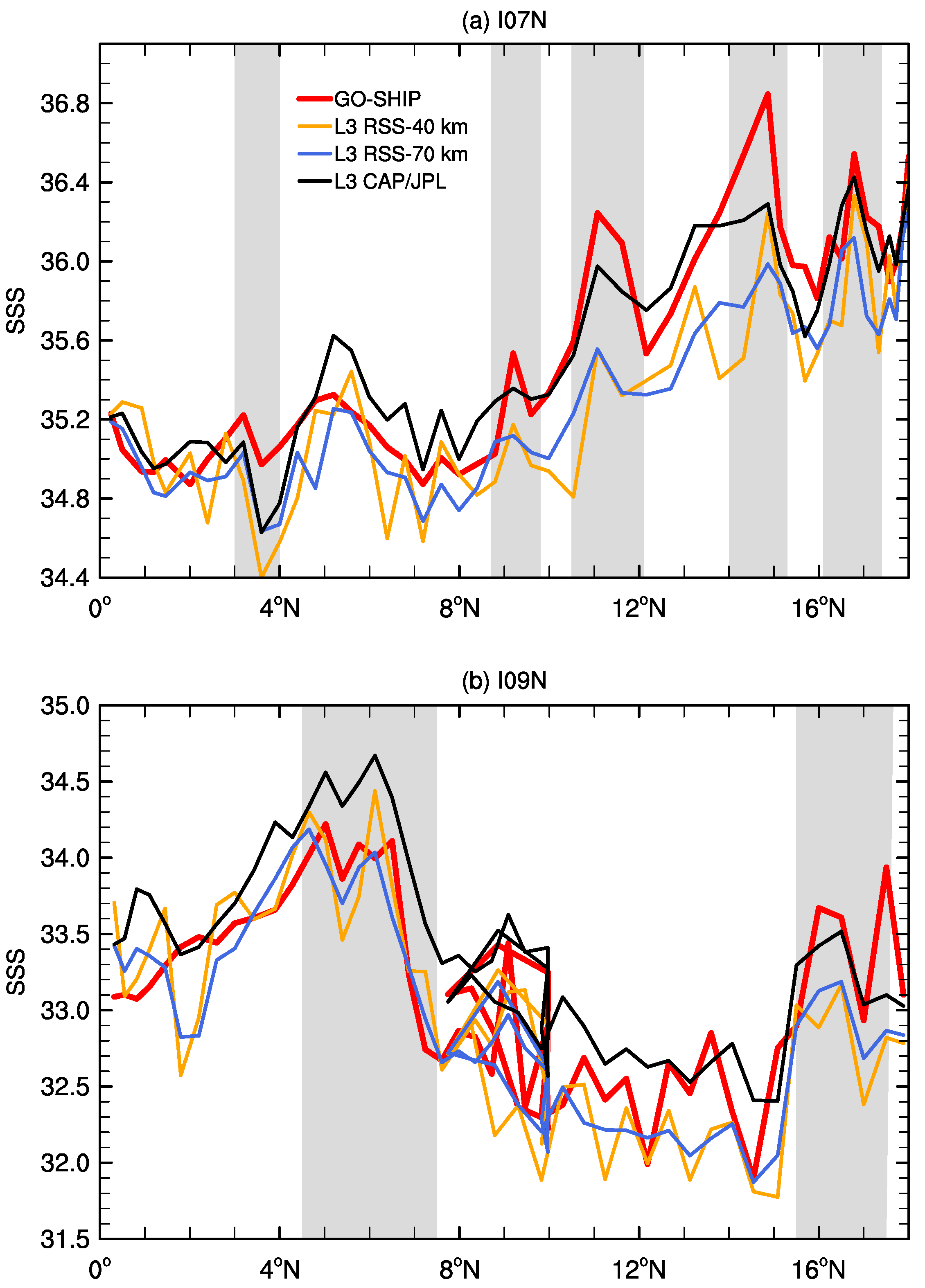
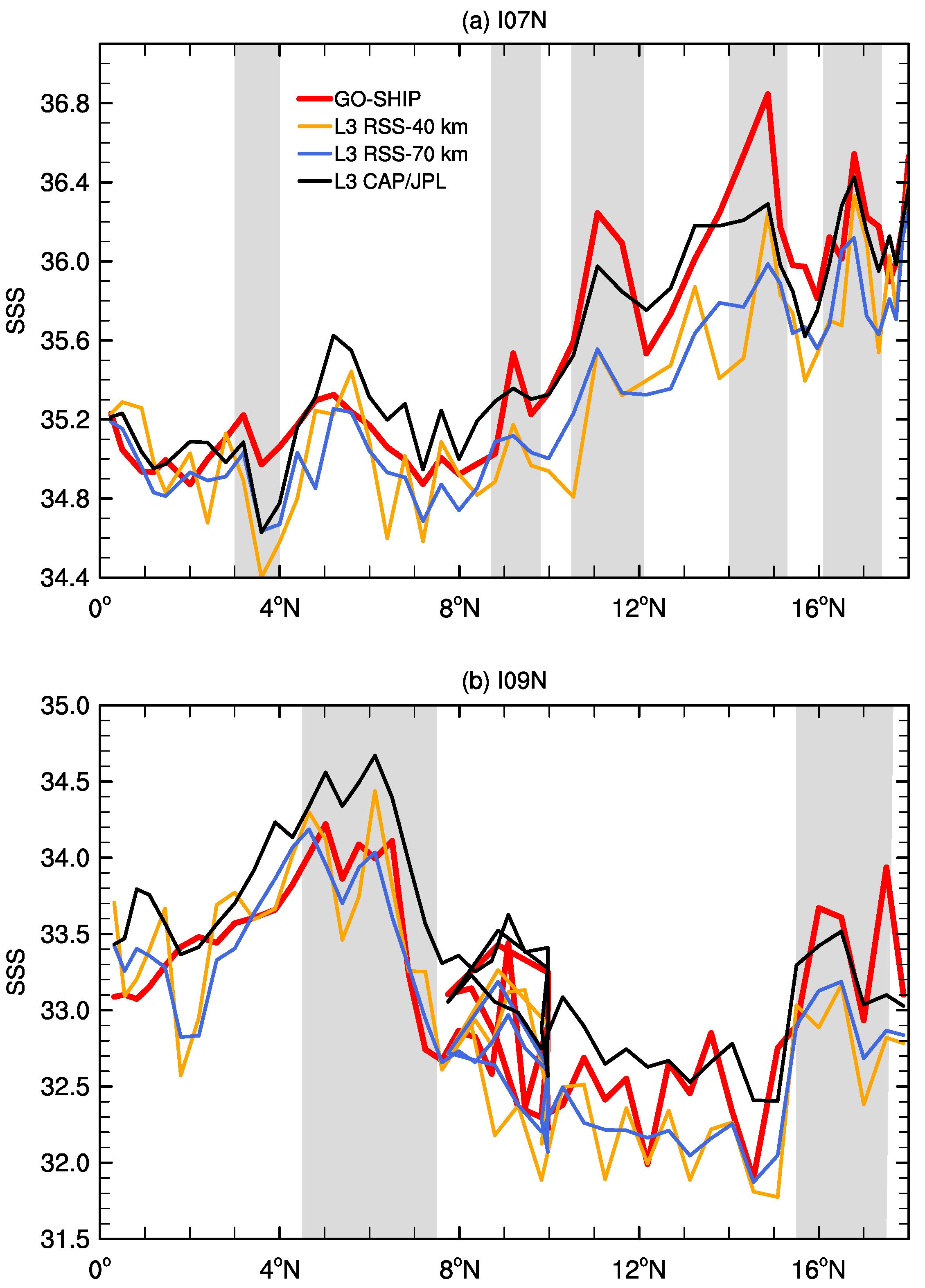
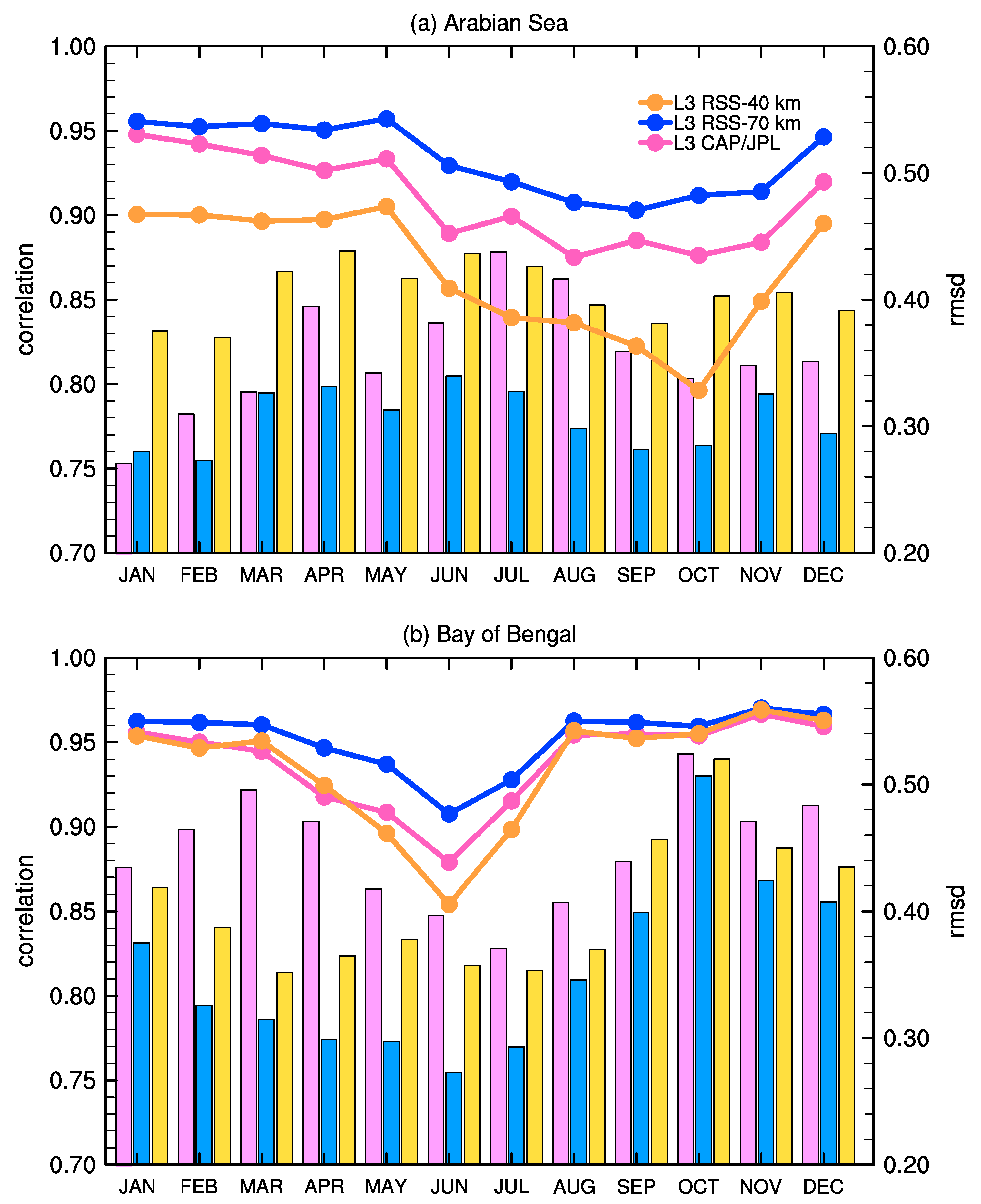
Furthermore, SMAP captures seasonal and subseasonal SSS variability, and also captures exceptionally well the sharp drops in salinity in the northern Bay of Bengal measured by the WHOI mooring, although with less intensity. The present work showed that there is seasonal sensitivity in SMAP’s skills, but the performance decrease is small and not equal in the western and eastern basin. In the Bay of Bengal, SMAP performance is lower in June while, in the Arabian Sea, it is around October. Interestingly, GO-SHIP hydrographic sections in the Arabian Sea and the Bay of Bengal give new evidence that SMAP can capture salinity features, which may be related to mesoscale eddies.
Agreement between the new SMAP products and Argo floats is better in the Bay of Bengal than that in the Arabian Sea, but this better agreement is not apparent when using TSG or RAMA data. Within the Arabian Sea, SMAP performance is much reduced on the western side for all products. This fact is particularly evident in the Gulfs of Aden and Oman. Skill reduction in these regions is possibly related to RFI contamination there, a subject to be further investigated. However, there is evidence that SMAP may be capturing SSS signatures due to mesoscale eddies in the Gulf of Aden, but this matter requires in-depth study.
On the other hand, SMAP retrievals in the narrow Red Sea are surprisingly good. SMAP statistics (with both TSG and Argo floats) are similar to the ones found in open-ocean water away from the coast. Results there encourage the development of a specially designed SMAP product in this marginal sea where the scarcity of SSS observations is historical, and not much is known about SSS variability [
22,
48]. One could imagine designing a product by using more advanced filtering techniques to remove spatial noise in L2 data, such as the ones based on singular spectrum analysis used by Menezes et al. [
61], and an optimal interpolation scheme to map SMAP L2-filtered data into a regular grid instead of simple average binning.
A still-present limitation in both RSS and CAP/JPL products is the bias in the entire North Indian Ocean. However, because the bias is consistent and spatially homogeneous, as shown here, it should not affect studies about temporal SSS variability in the North Indian Ocean, which is the next step in this project. Issues still to be thoroughly investigated are the possible effects of RFI contamination, particularly in the Gulf of Oman, and precipitation in the Bay of Bengal during the summer monsoon. However, in the latter case, the in situ data currently available are not the most adequate since Argo floats do not capture possible near-surface stratification (0–5 m) that may occur in heavy rainfall.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}