A Deep Learning Method for Mapping Glacial Lakes from the Combined Use of Synthetic-Aperture Radar and Optical Satellite Images

 ,
, 
 ,
,  , ,
, ,  and
and 
Abstract

1. Introduction
2. Model and Algorithm
2.1. U-Net Model Architecture
2.2. Principle and Algorithm Analysis
- Gradient optimizer. The Adam optimizer, which combines the advantages of two optimization algorithms, namely, AdaGrad and root-mean-square propagation (RMSProp), is selected. Through comprehensive consideration of the first- and second-order moment estimates for the gradient, the step size is updated.
- Loss function. The Tversky function is selected as a loss function to effectively balance positive and negative samples.
- Activation functions. The softmax function is used in the output layer to directly output the classification of the image. All the other convolutional layers are nonlinearly activated using the ReLU function.
- Learning rate. The initial learning rate is set to 0.001. The loss function-based monitoring method is adopted. When the training falls into a local optimum, the learning rate is reduced.
- Image enhancement. During each iteration, the image is disordered and randomly reversed, and its brightness and saturation are altered.
- Evaluation metrics. The intersection-over-union (IoU), Tversky index, and accuracy are selected as evaluation metrics.
3. Study Area and Data Sources
3.1. General Information about the Study Area
3.2. Introduction to the Data Sources
4. Experiment and Result
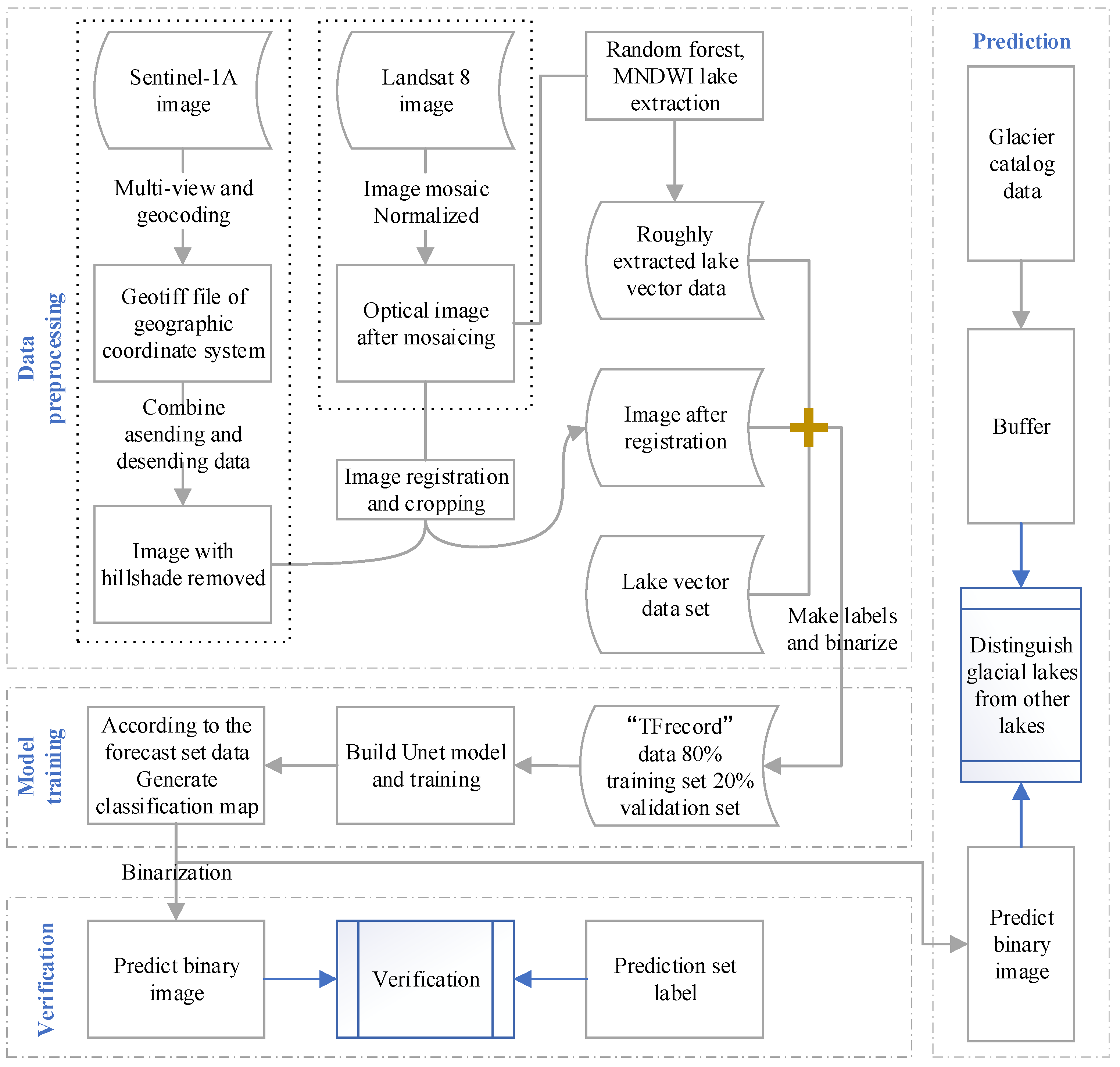
4.1. Experimental Technical Scheme
4.2. Data Processing
4.3. Result
5. Discussion
5.1. Result Analysis
5.2. Defects in Current Work
- In terms of data, Landsat-8 and Sentinel-1 do not match the space-time scale very well, especially as the 2015 Sentinel-1 images have different sizes, orbital information changes, and repeated observation is unstable. On the spatial scale, we have adopted the mutual information method to improve images matching relationship, but it is difficult to achieve complete uniformity on the time scale.
- The shadows cast by mountains in the Sentinel-1 images were removed in the experiment using a combination of ascending- and descending-orbit data, but there are still mountain shadow areas that cannot be removed, which have a negative impact on the experimental results.
- This experiment is the first attempt to reorganize the deep learning method to extract the glacial lakes in remote sensing images. The model used is relatively simple and can be further improved in subsequent experiments.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Huggel, C.; Carey, M.; Emmer, A.; Frey, H.; Walker-Crawford, N.; Wallimann-Helmer, I. Anthropogenic climate change and glacier lake outburst flood risk: Local and global drivers and responsibilities for the case of lake Palcacocha, Peru. Nat. Hazards Earth Syst. Sci. 2020, 20, 2175–2193. [Google Scholar] [CrossRef]
- Yao, X.; Liu, S.; Han, L.; Sun, M. Definition and classification systems of glacial lake for inventory and hazards study. J. Glaciol. Geocryol. 2017, 72, 1173–1183. [Google Scholar] [CrossRef]
- Wen, J.; Han, P.F.; Zhou, Z.; Wang, X.S. Lake level dynamics exploration using deep learning, artificial neural network, and multiple linear regression techniques. Environ. Earth Sci. 2019, 78, 1–12. [Google Scholar] [CrossRef]
- Cheng, Z.; Zhu, P.; Dang, C.; Liu, J. Hazards of Debris Flow due to Glacier-Lake Outburst in Southeastern Tibet. J. Glaciol. Geocryol. 2008, 030, 954–959. [Google Scholar]
- Hewitt, K.; Liu, J. Ice-Dammed lakes and outburst floods, Karakoram Himalaya: Historical perspectives on emerging threats. Phys. Geogr. 2010, 31, 528–551. [Google Scholar] [CrossRef]
- Westoby, M.J.; Glasser, N.F.; Brasington, J.; Hambrey, M.J.; Quincey, D.J.; Reynolds, J.M. Modelling outburst floods from moraine-dammed glacial lakes. Earth-Sci. Rev. 2014, 134, 137–159. [Google Scholar] [CrossRef]
- Richardson, S.D.; Reynolds, J.M. An overview of glacial hazards in the Himalayas. Quat. Int. 2000, 65, 31–47. [Google Scholar] [CrossRef]
- Roy, D.P.; Wulder, M.A.; Loveland, T.R.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Helder, D.; Irons, J.R.; Johnson, D.M.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Env. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Zhou, M.; Zhang, S.; Zhan, W.; Sun, C.; Duan, Y. Landsat 8 OLI image based terrestrial water extraction from heterogeneous backgrounds using a reflectance homogenization approach. Remote Sens. Env. 2015, 171, 14–32. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Joshi, P.K.; Snehmani; Sam, L.; Singh, M.K.; Singh, S.; Kumar, R. Applicability of Landsat 8 data for characterizing glacier facies and supraglacial debris. Int. J. Appl. Earth Obs. Geoinf. 2015, 38, 51–64. [Google Scholar] [CrossRef]
- Yang, C.; Wang, X.; Wei, J.; Liu, S. A dataset of glacial lake inventory of West China in 2015. China Sci. Data 2018, 3, 36–44. [Google Scholar]
- Zhang, G.; Yao, T.; Xie, H.; Wang, W.; Yang, W. An inventory of glacial lakes in the Third Pole region and their changes in response to global warming. Glob. Planet. Chang. 2015, 131, 148–157. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Singh, M.K.; Joshi, P.K.; Snehmani; Singh, S.; Sam, L.; Gupta, R.D.; Kumar, R. A lake detection algorithm (LDA) using Landsat 8 data: A comparative approach in glacial environment. Int. J. Appl. Earth Obs. Geoinf. 2015, 38, 150–163. [Google Scholar] [CrossRef]
- Wessels, R.L.; Kargel, J.S.; Kieffer, H.H. ASTER measurement of supraglacial lakes in the Mount Everest region of the Himalaya. Ann. Glaciol. 2002, 34, 399–408. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, M.; Tian, B.; Li, Z. Extraction of Glacial Lake Outlines in Tibet Plateau Using Landsat 8 Imagery and Google Earth Engine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4002–4009. [Google Scholar] [CrossRef]
- Barbieux, K.; Charitsi, A.; Merminod, B. Icy lakes extraction and water-ice classification using Landsat 8 OLI multispectral data. Int. J. Remote Sens. 2018, 39, 3646–3678. [Google Scholar] [CrossRef]
- Luo, J.; Sheng, Y.; Shen, Z.; Li, J.; Gao, L. Automatic and high-precise extraction for water information from multispectral images with the step-by-step iterative transformation mechanism. J. Remote Sens. 2009, 013, 604–615. [Google Scholar]
- Tom, M.; Aguilar, R.; Imhof, P.; Leinss, S.; Baltsavias, E.; Schindler, K. Lake ice detection from sentinel-1 sar with deep learning. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 5, 409–416. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, G.; Zhu, T. Seasonal cycles of lakes on the Tibetan Plateau detected by Sentinel-1 SAR data. Sci. Total Env. 2020, 703, 135563. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Zhang, R.; Liu, G.; Liu, Q.; Cai, J.; Yu, B.; Fu, Y.; Li, Z. Monitoring of Interannual Variabilities and Outburst Regularities Analysis of Glacial Lakes at the End of Gongba Glacier Utilizing SAR Image. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 1054–1064. [Google Scholar]
- Hanshaw, M.N.; Bookhagen, B. Glacial areas, lake areas, and snow lines from 1975 to 2012: Status of the cordillera vilcanota, including the Quelccaya Ice Cap, northern central Andes, Peru. Cryosphere 2014, 8, 359–376. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. Lect. Notes Comput. Sci. Incl. Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinform. 2015, 9351, 234–241. [Google Scholar]
- Zhou, Z.; Siddiquee, M.M.R.; Tajbakhsh, N.; Liang, J. Unet++: A nested u-net architecture for medical image segmentation. Lect. Notes Comput. Sci. Incl. Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinform. 2018, 11045 LNCS, 3–11. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the Lecture Notes in Computer Science (including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2018; Volume 11211 LNCS, pp. 833–851. [Google Scholar]
- Xin, X.; Yao, T.; Ye, Q.; Guo, L.; Yang, W. Study of the Fluctuations of Glaciers and Lakes around the Ranwu Lake of Southeast Tibetan Plateau using Remote Sensing. J. Glaciol. Geocryol. 2009, 31, 19–26. [Google Scholar]
- Liu, S.; Shang, D.; Ding, Y.; Han, H.; Zhang, Y.; Wang, J.; Xie, C.; Ding, L.; Li, G. Glacier Variations since the Early 20th Century in the Gangrigabu Range, Southeast Tibetan Plateau. J. Glaciol. Geocryol. 2005, 27, 55–63. [Google Scholar]
- Liu, S.; Shangguan, D.; Ding, Y.; Han, H.; Xie, C.; Zhang, Y.; Li, J.; Wang, J.; Li, G. Glacier changes during the past century in the Gangrigabu m ountains, southeast Qinghai-Xizang (Tibetan) Plateau, China. Ann. Glaciol. 2006, 43, 187–193. [Google Scholar] [CrossRef]
- Liu, S.; Xu, J. The second glacier inventory dataset of China (version 1.0) (2006–2011). Natl. Tibet. Plateau Data Cent. 2012. [Google Scholar] [CrossRef]
- Chen, H.M.; Arora, M.K.; Varshney, P.K. Mutual information-based image registration for remote sensing data. Int. J. Remote Sens. 2003, 24, 3701–3706. [Google Scholar] [CrossRef]
- Ostu, N. A threshold selection method from gray-histogram. IEEE Trans. Syst. Man. Cybern. 1978, 9, 62–66. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Remote Sensing Satellite | Date (YYYY-MM-DD) | Path/Row No. | Image Explanation |
|---|---|---|---|
| Landsat 8 Operational Land Imager (OLI) | 2015-09-29 and 2015-10-31 | 133/38, 39, 40, and 41 | Training set 0.4% < cloud cover < 17.0% |
| 2015-10-06 and 2015-11-23 | 134/38, 39, and 40 | Training set 1.6% < cloud cover < 8.0% | |
| 2015-10-13 | 135/38, 39, and 40 | Training set 4.0% < cloud cover < 15.0% | |
| 2015-10-20 and 2015-11-21 | 136/38, 39, 40, and 41 | Validation and training sets 1.6% < cloud cover < 3.0% | |
| 2015-10-11 and 2015-10-27 | 137/38, 39, 40, and 41 | Prediction set 2.3% < cloud cover < 20.0% | |
| 2015-10-02 and 2015-10-18 | 138/39 and 40 | Prediction set 2.2% < cloud cover < 4.9% | |
| 2015-10-02 and 2015-10-21 | 138/37, 141/39, and 143/39 | Prediction set (used for evaluation) 0.13% < cloud cover < 4.4% | |
| Sentinel-1A in ascending orbit | 2015-09 and 2015-10 | Images covering 23 scenes of the same area | SAR amplitude images Interferometric wide swath (IW) mode |
| Sentinel-1A in descending orbit | 2015-09 and 2015-10 | Images covering 20 scenes of the same area | SAR amplitude images IW mode |
| # | Method | Number of Samples | Number of False Negatives | Number of False Positives | IoU > 0.5 | Overall IoU |
|---|---|---|---|---|---|---|
| 1 | U-net + All | 4960 | 92 | 397 | 3657 | 0.6397 |
| 2 | U-net + Optical | 242 | 768 | 3292 | 0.6014 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, R.; Liu, G.; Zhang, R.; Wang, X.; Li, Y.; Zhang, B.; Cai, J.; Xiang, W. A Deep Learning Method for Mapping Glacial Lakes from the Combined Use of Synthetic-Aperture Radar and Optical Satellite Images. Remote Sens. 2020, 12, 4020. https://doi.org/10.3390/rs12244020
Wu R, Liu G, Zhang R, Wang X, Li Y, Zhang B, Cai J, Xiang W. A Deep Learning Method for Mapping Glacial Lakes from the Combined Use of Synthetic-Aperture Radar and Optical Satellite Images. Remote Sensing. 2020; 12(24):4020. https://doi.org/10.3390/rs12244020
Chicago/Turabian StyleWu, Renzhe, Guoxiang Liu, Rui Zhang, Xiaowen Wang, Yong Li, Bo Zhang, Jialun Cai, and Wei Xiang. 2020. "A Deep Learning Method for Mapping Glacial Lakes from the Combined Use of Synthetic-Aperture Radar and Optical Satellite Images" Remote Sensing 12, no. 24: 4020. https://doi.org/10.3390/rs12244020
APA StyleWu, R., Liu, G., Zhang, R., Wang, X., Li, Y., Zhang, B., Cai, J., & Xiang, W. (2020). A Deep Learning Method for Mapping Glacial Lakes from the Combined Use of Synthetic-Aperture Radar and Optical Satellite Images. Remote Sensing, 12(24), 4020. https://doi.org/10.3390/rs12244020