Automatic Extraction of Seismic Landslides in Large Areas with Complex Environments Based on Deep Learning: An Example of the 2018 Iburi Earthquake, Japan


 ,
, 
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
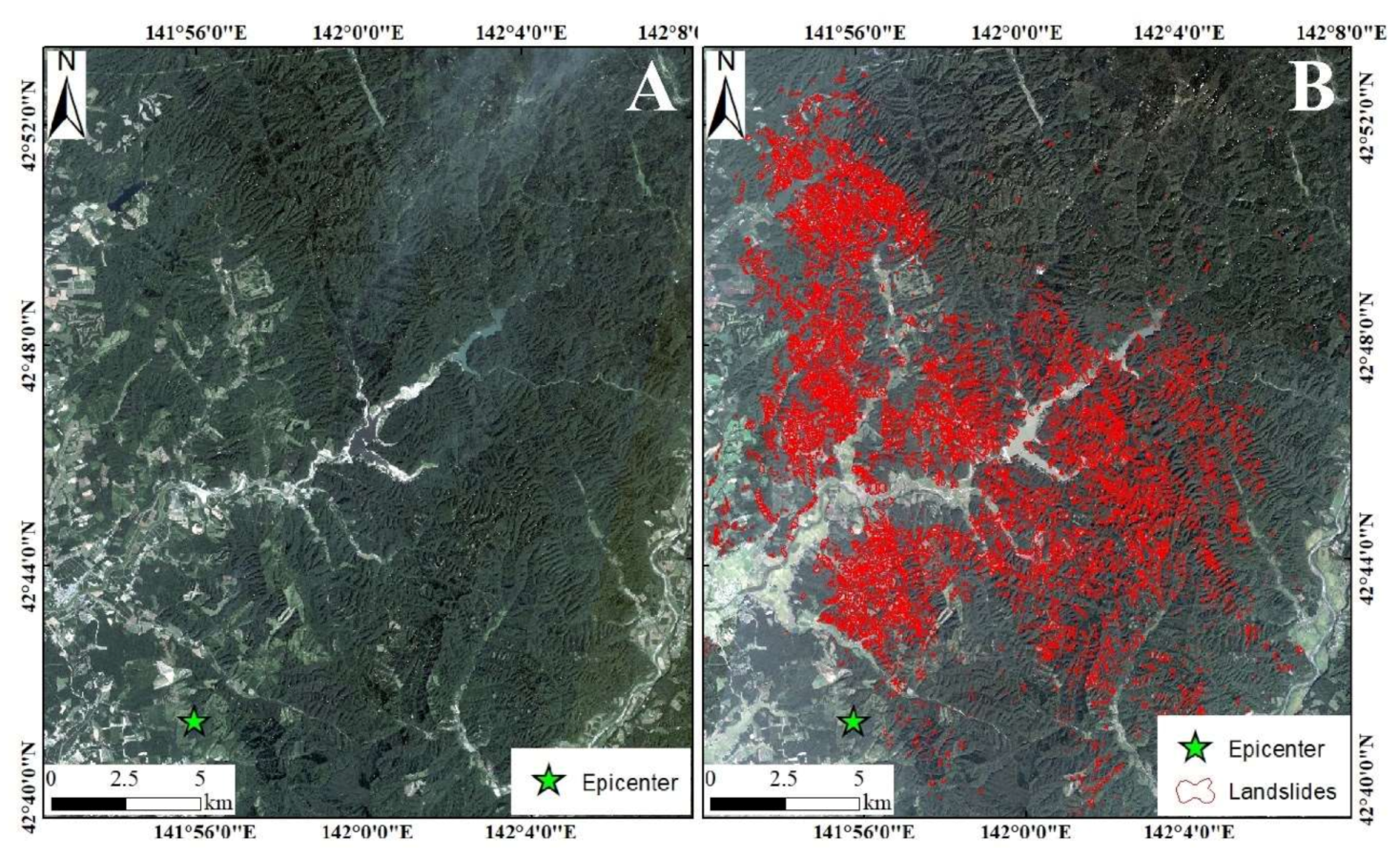
2. Study Area
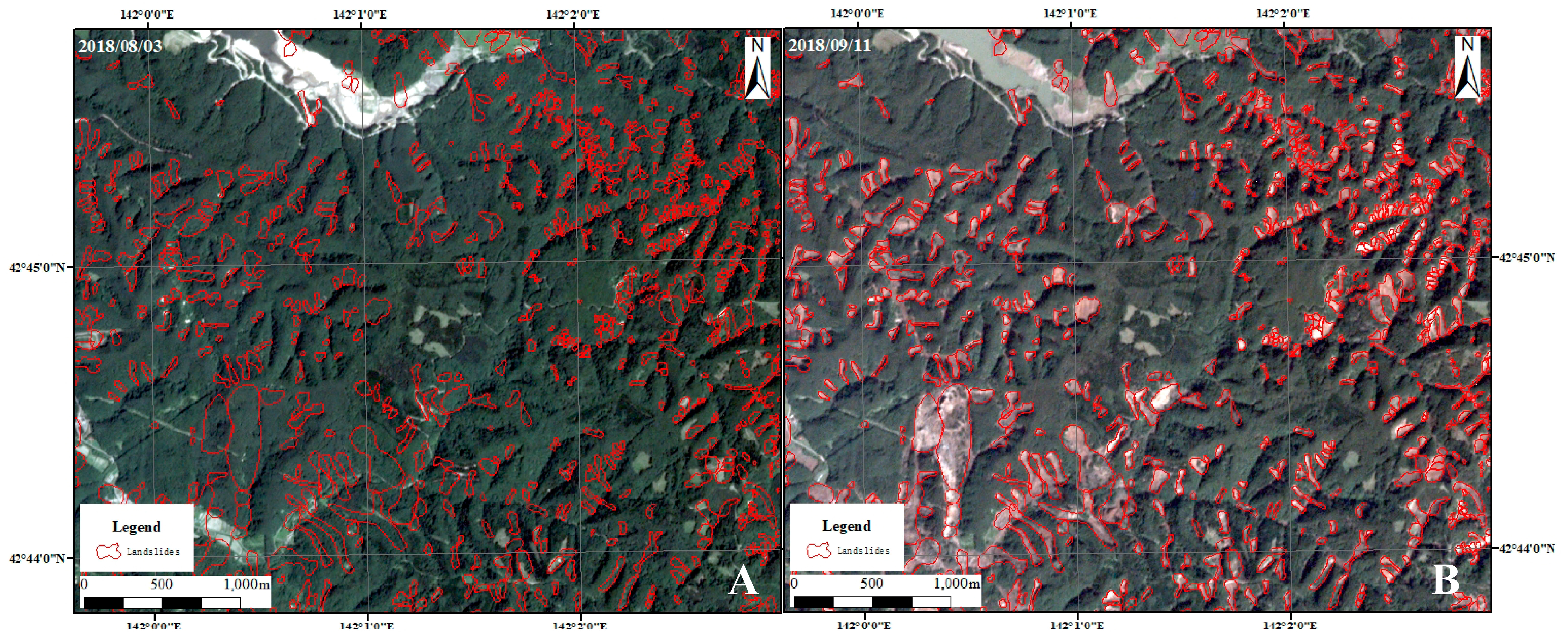
3. Data
4. Method
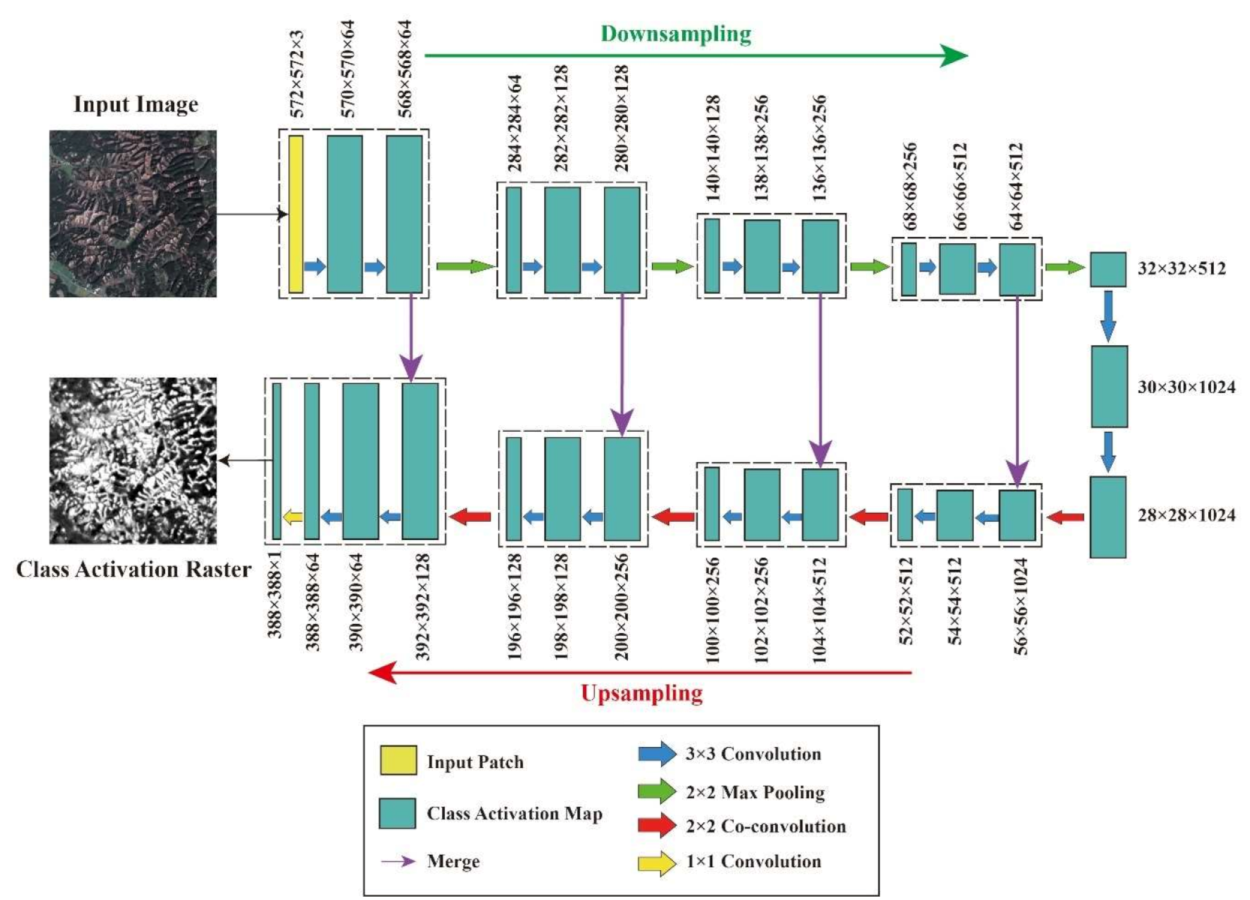
4.1. ENVINet5 Network Architecture
4.2. Initializing TensorFlow Model
4.3. Training TensorFlow Models
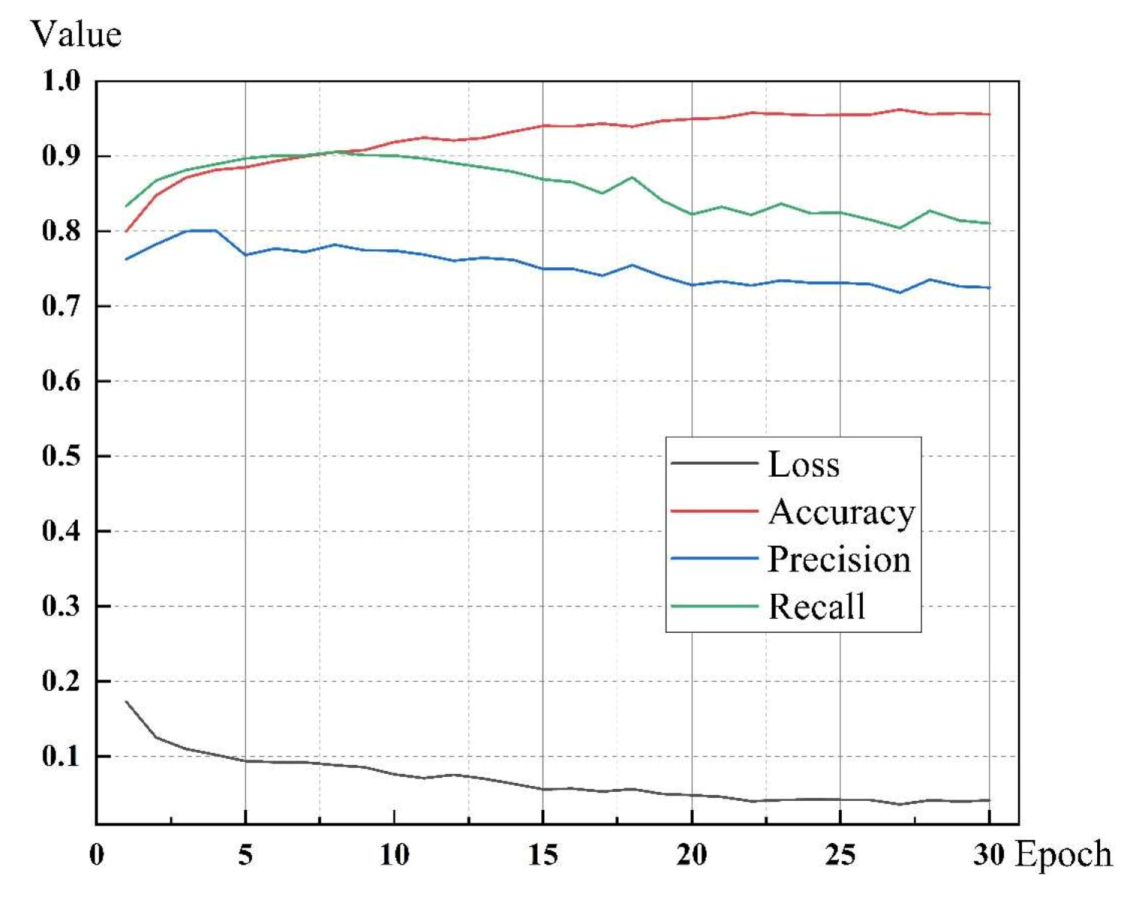
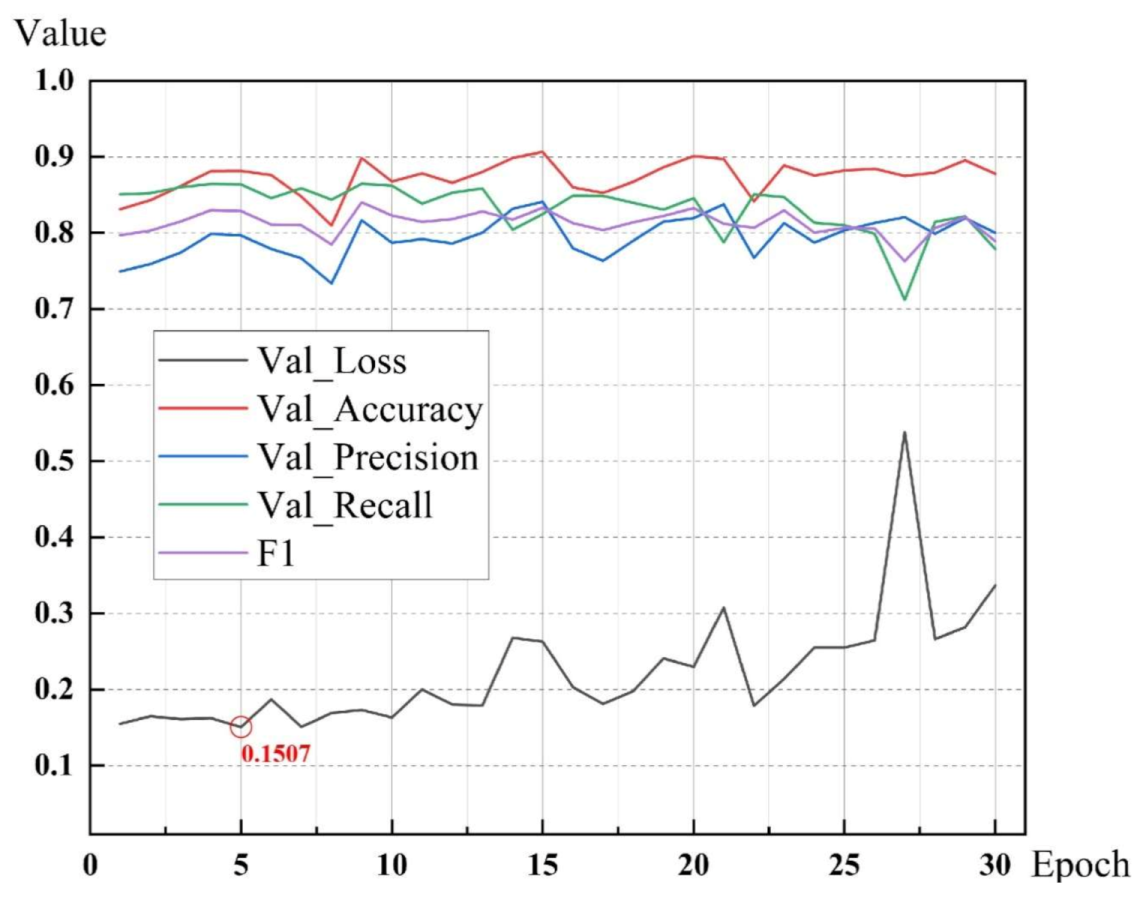
4.4. Model Training and Validation Indexes
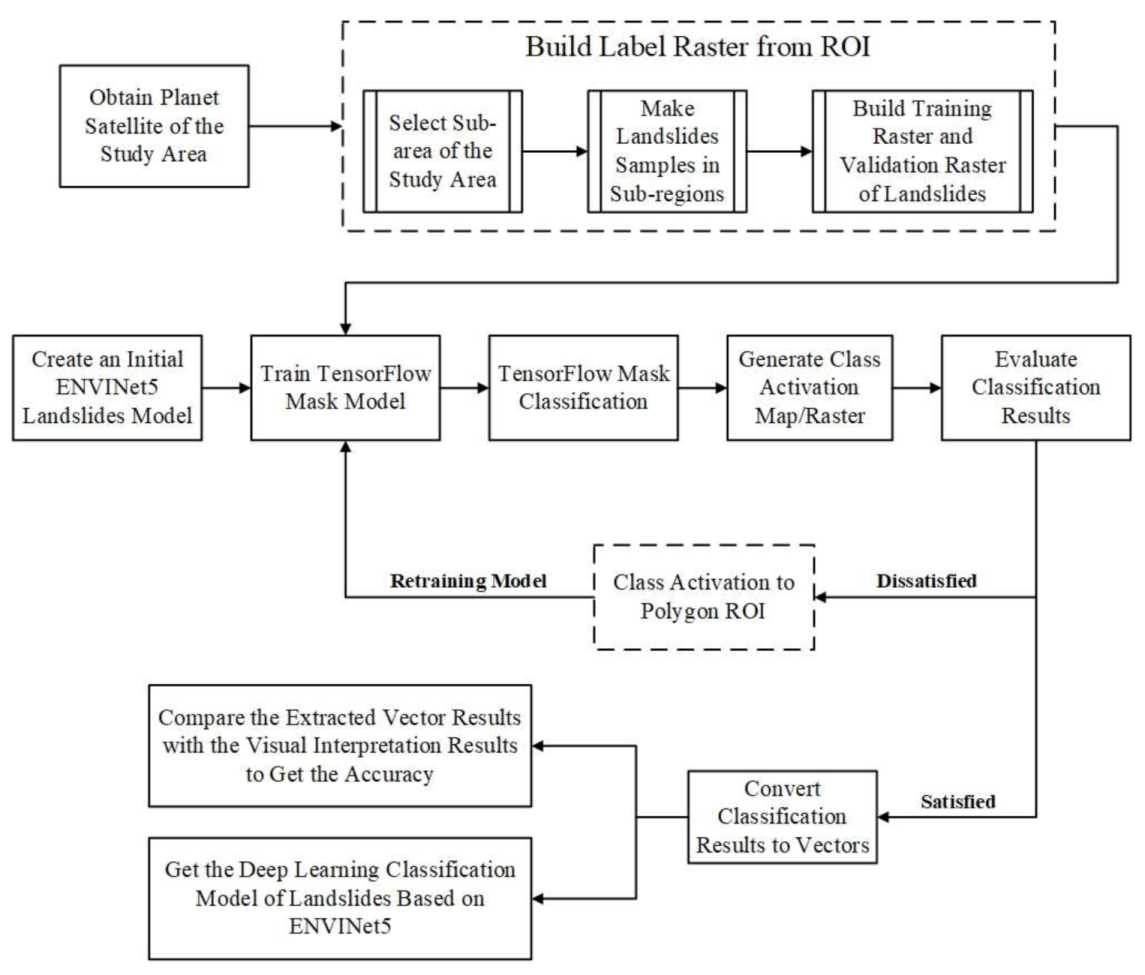
4.5. Work Flow of Landslide Extraction
5. Results
5.1. Model Training and Validation
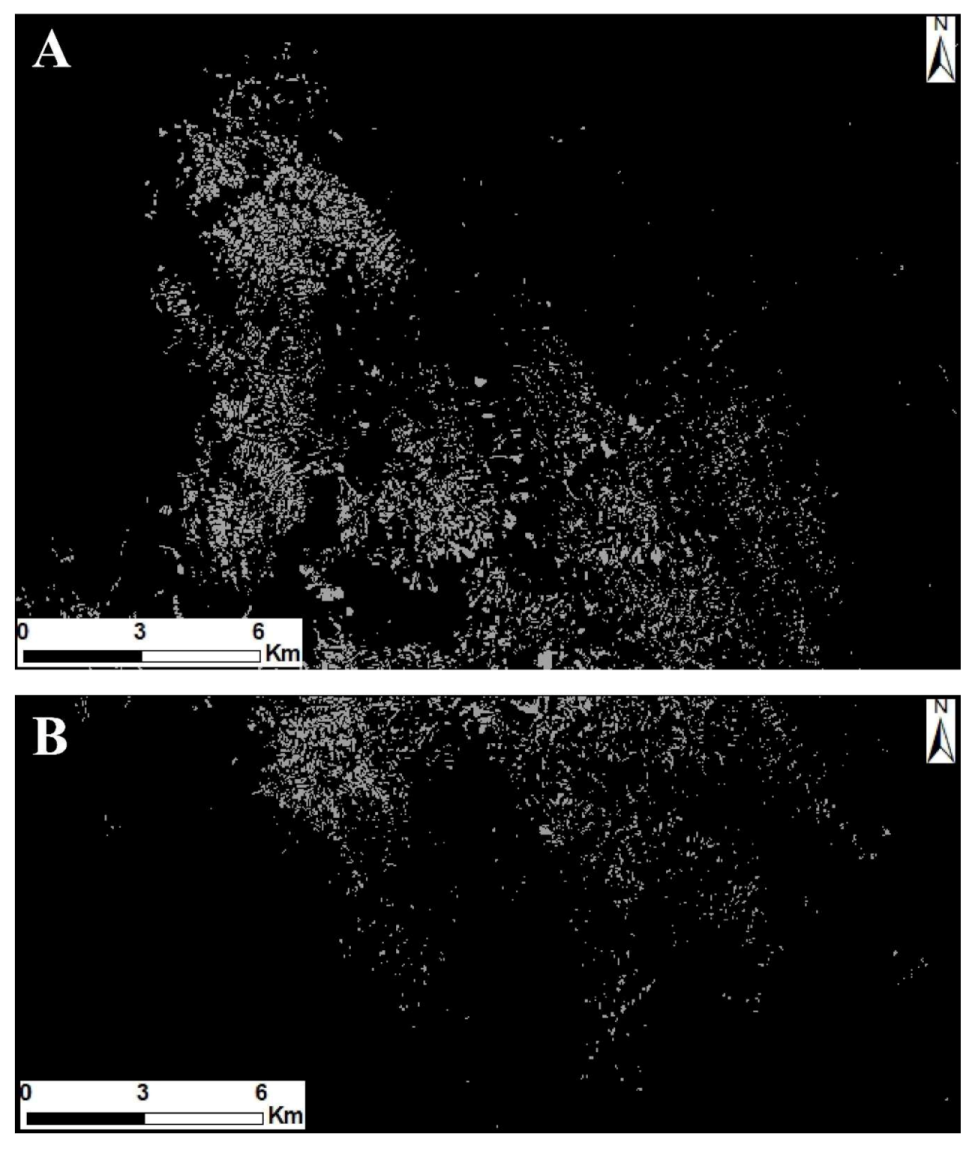
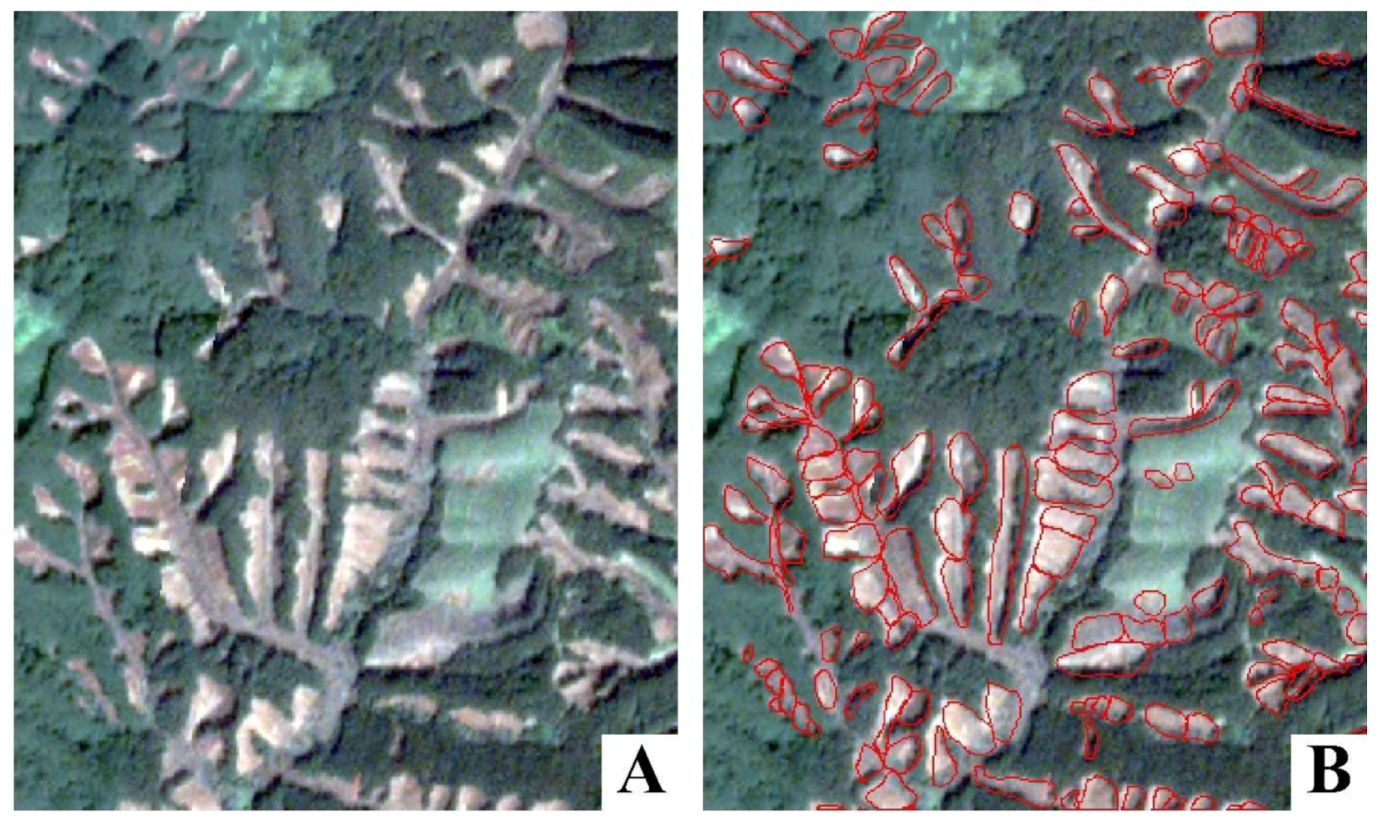
5.2. Image Classification
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Keefer, D.K. Landslides caused by earthquakes. Geol. Soc. Am. Bull. 1984, 95, 406–421. [Google Scholar] [CrossRef]
- Xu, C.; Xu, X.; Zhou, B.; Shen, L. Probability of coseismic landslides: A new generation of earthquake-triggered landslide hazard model. J. Eng. Geol. 2019, 27, 1122–1130. [Google Scholar]
- Li, H.; Xu, Q.; He, Y.; Fan, X.; Li, S. Modeling and predicting reservoir landslide displacement with deep belief network and EWMA control charts: A case study in Three Gorges Reservoir. Landslides 2019, 17, 693–707. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Meena, S.R.; Blaschke, T.; Aryal, J. UAV-based slope failure detection using deep-learning convolutional neural networks. Remote Sens. 2019, 11, 2046. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, J.; Luo, Y.; Jiao, Q. Recognition of earthquake-induced landslide and spatial distribution patterns triggered by the Jiuzhaigou earthquake in August 8, 2017. J. Remote Sens. 2019, 23, 785–795. [Google Scholar]
- Prakash, N.; Manconi, A.; Loew, S. Mapping landslides on EO data: Performance of deep learning models vs. traditional machine learning models. Remote Sens. 2020, 12, 346. [Google Scholar] [CrossRef]
- Ouyang, Z.; Xu, W.; Wang, X.; Wang, W.; Dong, R.; Zheng, H.; Li, D.; Li, Z.; Zhang, H.; Zhuang, C. Impact assessment of Wenchuan Earthquake on ecosystems. Acta Ecol. Sin. 2008, 28, 5801–5809. [Google Scholar]
- Parker, R.N.; Densmore, A.L.; Rosser, N.J.; de Michele, M.; Li, Y.; Huang, R.; Whadcoat, S.; Petley, D.N. Mass wasting triggered by the 2008 Wenchuan earthquake is greater than orogenic growth. Nat. Geosci. 2011, 4, 449–452. [Google Scholar] [CrossRef]
- Marc, O.; Hovius, N. Amalgamation in landslide maps: Effects and automatic detection. Nat. Hazards Earth Syst. Sci. 2015, 15, 723–733. [Google Scholar] [CrossRef]
- Xu, C. Automatic extraction of earthquake-triggered landslides based on maximum likelihood method and its validation. Chin. J. Geol. Hazard Control 2013, 24, 19–25. [Google Scholar]
- Chen, W.; Hou, Y.; Li, N.; Zhong, C.; Amu, L.; Chen, c.; Sun, J.; Li, H. Post-Earthquake Landslides Detection in Nepal Based On Principal Component Analysis(PCA). J. Yangtze River Sci. Res. Inst. 2020, 37, 166–171, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Li, Z.; Li, Y.; Guo, J.; Zhang, S.; Liu, K. An automatic landslide interpretation model of UAV imagery based on BoW. Remote Sens. Inf. 2016, 31, 24–29. [Google Scholar] [CrossRef]
- Fu, W.; Hong, J. Discussion on application of support vector machine technique in extraction of information on landslide hazard from remote sensing images. Res. Soil Water Conserv. 2006, 13, 120–121+124. [Google Scholar]
- Fu, X.; Guo, J.; Liu, X.; Lu, H.; Yang, Z.; Xiang, X. Method of earthquake landslide information extraction based on high resolution unmanned aerial vehicle images. J. Seismol. Reseach 2018, 41, 186–191. [Google Scholar]
- Guo, J.; Li, Y.; Li, Z.; Liu, K.; Zhang, S. An automatic interpretation model for mountains landslide disaster of high-resolution remote sensing images based on transfer learning. J. Geomat. Sci. Technol. 2016, 33, 496–501. [Google Scholar] [CrossRef]
- Cheng, K.S.; Wei, C.; Chang, S.C. Locating landslides using multi-temporal satellite images. Adv. Space Res. 2004, 33, 296–301. [Google Scholar] [CrossRef]
- Hervás, J.; Barredo, J.I.; Rosin, P.L.; Pasuto, A.; Franco, M.; Silvano, S. Monitoring landslides from optical remotely sensed imagery: The case history of Tessina landslide, Italy. Geomorphol. 2003, 54, 63–75. [Google Scholar] [CrossRef]
- Nichol, J.; Wong, M.S. Satellite remote sensing for detailed landslide inventories using change detection and image fusion. Int. J. Remote Sens. 2005, 26, 1913–1926. [Google Scholar] [CrossRef]
- Park, N.W.; Chi, K.H. Quantitative assessment of landslide susceptibility using high-resolution remote sensing data and a generalized additive model. Int. J. Remote Sens. 2008, 29, 247–264. [Google Scholar] [CrossRef]
- Labrinidis, A.; Jagadish, H.V. Challenges and Opportunities With Big Data. In Proceedings of the Vldb Endowment; VLDB Endowment: Istanbul, Turkey, 2012; pp. 2032–2033. [Google Scholar]
- Deng, S. ENVI Remote Sensing Image Processing Method; Science Press: Peking, China, 2010. [Google Scholar]
- Budha, P.B.; Bhardwaj, A. Landslide extraction from sentinel-2 image in Siwalik of Surkhet District, Nepal. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 9–15. [Google Scholar] [CrossRef]
- Ding, H. Study on Landslides Geo-Hazard Zoning Base on Remote Sensing. Ph.D. Thesis, Chang’an University, Xi’an, China, 2011. [Google Scholar]
- Huang, T.; Bai, X.; Zhuang, Q.; Xu, J. Research on landslides extraction based on the Wenchuan Earthquake in GF-1 remote sensing image. Bull. Surv. Mapp. 2018, 82, 67–71. [Google Scholar]
- Jiao, Q.S.; Luo, Y.; Shen, W.H.; Li, Q.; Wang, X. Rapid extraction of landslide and spatial distribution analysis after Jiuzhaigou Ms 7.0 earthquake based on UAV images. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 685–690. [Google Scholar] [CrossRef]
- Li, J. Landslide Information Extraction and Risk Assessment of High Resolution Imagery in Weizhou Town, Wenchuan County. Master’s Thesis, Chengdu University of Technology, Chengdu, China, 2019. [Google Scholar]
- Li, X. Loess Landsliderecognition Bases on Remote Sensing Image and DEM-a Case Study of North Mountain and South Mountain in Tianshui. Master’s Thesis, Lanzhou University, Lanzhou, China, 2017. [Google Scholar]
- Lin, L. Research on Information Extraction Methods of Landslide in the Red-Bed of Mayang. Master’s Thesis, China University of Geosciences, Peking, China, 2020. [Google Scholar]
- Lin, Q.; Zou, Z.; Zhu, Y.; Wang, Y. Object-oriented detection of landslides based on the spectral, spatial and morphometric properties of landslides. Remote Sens. Technol. Appl. 2017, 32, 931–937. [Google Scholar] [CrossRef]
- Zhang, Q. Landslide Recognition Based on High Resolution Remote Sensing Images in Heifangtai. Master’s Thesis, Chang’an University, Xi’an, China, 2017. [Google Scholar]
- Cheng, T.; Hu, Z.; Wei, L.; Hu, S. Data processing and landslide information extraction based on UAV remote sensing. J. Geo Inf. Sci. 2017, 19, 692–701. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, W.; Yi, Y. An information extraction method of earthquake-induced landslide: A case study of the Jiuzhaigou earthquake in 2017. J. Univ. Chin. Acad. Sci. 2020, 37, 93–102. [Google Scholar]
- Lu, H.; Ma, L.; Fu, X.; Liu, C.; Wang, Z.; Tang, M.; Li, N. Landslides information extraction using object-oriented image analysis paradigm based on deep learning and transfer learning. Remote Sens. 2020, 12, 752. [Google Scholar] [CrossRef]
- Wang, N.; Chen, F.; Yu, B. A Object-oriented landslide extraction method based on morphological opening operation. Remote Sens. Technol. Appl. 2018, 33, 520–529. [Google Scholar]
- Wang, X.; Lu, H.; Liu, X.; Yang, Z.; Xiang, X.; Cai, S. Rapid detection of seismic landslide information based on SHALSTAB model and object-oriented remote sensing image. J. Seismol. Reseach 2019, 42, 273–279+306. [Google Scholar]
- Zhang, S. The method of landslide extraction with high resolution remote sensing image combining change detection and object oriented method. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2017. [Google Scholar]
- Gao, H. Object-Oriente Classification Based on Deep Features for High Resolution Remotely Sensed Imagery. Master’s Thesis, University of Chinese Academy of Sciences (Institute of Remote Sensing and Digital Earth Chinese Academy of Sciences), Peking, China, 2018. [Google Scholar]
- Hao, Y. Object-based image classification of post-earthquake high resolution imagery based on deep learning. Master’s Thesis, China University of Petroleum (East China), Tsingtao, China, 2018. [Google Scholar]
- Li, Y. Research on Landslide Detection Algorithm Based on Deep Learning. Master’s Thesis, Chengdu University of Technology, Chengdu, China, 2018. [Google Scholar]
- Yu, B.; Chen, F.; Xu, C. Landslide detection based on contour-based deep learning framework in case of national scale of Nepal in 2015. Comput. Geosci. 2020, 135, 104388. [Google Scholar] [CrossRef]
- Zhao, P.; Li, J.; Kang, F. Fast recognition method for mountain hazards in river courses based on convolutional neural networks. Hydro Sci. Eng. 2019, 65–70. [Google Scholar]
- Zhang, M.; Jia, J.; Wang, Y.; Niu, Q.; Mao, Y.; Dong, Y. Construction of geological disaster prevention and control system based on AI. Northwest. Geol. 2019, 52, 103–116. [Google Scholar]
- Ji, S.; Yu, D.; Shen, C.; Li, W.; Xu, Q. Landslide detection from an open satellite imagery and digital elevation model dataset using attention boosted convolutional neural networks. Landslides 2020, 17, 1337–1352. [Google Scholar] [CrossRef]
- Mutlu, B.; Nefeslioglu, H.A.; Sezer, E.A.; Akcayol, M.A.; Gokceoglu, C. An experimental research on the use of recurrent neural networks in landslide susceptibility mapping. ISPRS Int. J. Geo Inf. 2019, 8, 578. [Google Scholar] [CrossRef]
- Shi, W.; Zhang, M.; Ke, H.; Fang, X.; Zhan, Z.; Chen, S. Landslide recognition by deep convolutional neural network and change detection. IEEE Trans. Geosci. Remote Sens. 2020, 1–19. [Google Scholar] [CrossRef]
- Ye, C.; Li, Y.; Cui, P.; Li, L.; Pirasteh, S.; Marcato, J.; Goncalves, W.N.; Li, J. Landslide detection of hyperspectral remote sensing data based on deep learning with constrains. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 1–14. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation; Springer International Publishing: Cham, Sitzerland, 2015; pp. 234–241. [Google Scholar]
- Liu, P.; Wei, Y.; Wang, Q.; Chen, Y.; Xie, J. Research on post-earthquake landslide extraction algorithm based on improved U-Net model. Remote Sens. 2020, 12, 894. [Google Scholar] [CrossRef]
- Qi, W.; Wei, M.; Yang, W.; Xu, C.; Ma, C. Automatic mapping of landslides by the ResU-Net. Remote Sens. 2020, 12, 2487. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Shao, X.; Ma, S.; Xu, C.; Zhang, P.; Wen, B.; Tian, Y.; Zhou, Q.; Cui, Y. Planet image-based inventorying and machine learning-based susceptibility mapping for the landslides triggered by the 2018 Mw6.6 Tomakomai, Japan Earthquake. Remote Sens. 2019, 11, 978. [Google Scholar] [CrossRef]
- Yamagishi, H.; Yamazaki, F. Landslides by the 2018 Hokkaido Iburi-Tobu Earthquake on September 6. Landslides 2018, 15, 2521–2524. [Google Scholar] [CrossRef]
- Amante, C.; Eakins, B.W. ETOPO1 1 Arc-Minute Global Relief Model: Procedures, Data Sources and Analysis. US Department of Commerce, National Oceanic and Atmospheric Administration, National Environmental Satellite, Data, and Information Service, National Geophysical Data Center Marine Geology and Geophysics Division: Boulder, Colorado. The United States, 2009. Available online: https://www.ngdc.noaa.gov/mgg/global/relief/ETOPO1/docs/ETOPO1.pdf (accessed on 10 January 2019).
- Team, P. Planet Application Program Interface: In Space for Life on Earth. Planet Company: San Francisco, CA, USA, 2018. Available online: https://api.planet.com (accessed on 10 January 2019).
- Li, J. Getting Started and Best Practices With TensorFlow for Deep Learning; China Machine Press: Peking, China, 2018. [Google Scholar]
- Otsu, N. A threshold selection method from Gray-Level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Li, D. Application research in glacier information extraction based on U-NET Model of deep learning. Master’s Thesis, China University of Geosciences, Peking, China, 2020. [Google Scholar]
- Lu, P.; Qin, Y.; Li, Z.; Mondini, A.C.; Casagli, N. Landslide mapping from multi-sensor data through improved change detection-based Markov random field. Remote Sens. Environ. 2019, 231. [Google Scholar] [CrossRef]
- Mondini, A.C.; Guzzetti, F.; Reichenbach, P.; Rossi, M.; Cardinali, M.; Ardizzone, F. Semi-automatic recognition and mapping of rainfall induced shallow landslides using optical satellite images. Remote Sens. Environ. 2011, 115, 1743–1757. [Google Scholar] [CrossRef]
- Fiorucci, F.; Ardizzone, F.; Mondini, A.C.; Viero, A.; Guzzetti, F. Visual interpretation of stereoscopic NDVI satellite images to map rainfall-induced landslides. Landslides 2018, 16, 165–174. [Google Scholar] [CrossRef]
- Tang, C.; Tanyas, H.; van Westen, C.J.; Tang, C.; Fan, X.; Jetten, V.G. Analysing post-earthquake mass movement volume dynamics with multi-source DEMs. Eng. Geol. 2018, 248, 89–101. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Xu, C.; Ma, S.; Shao, X.; Tian, Y.; Wen, B. Automatic Extraction of Seismic Landslides in Large Areas with Complex Environments Based on Deep Learning: An Example of the 2018 Iburi Earthquake, Japan. Remote Sens. 2020, 12, 3992. https://doi.org/10.3390/rs12233992
Zhang P, Xu C, Ma S, Shao X, Tian Y, Wen B. Automatic Extraction of Seismic Landslides in Large Areas with Complex Environments Based on Deep Learning: An Example of the 2018 Iburi Earthquake, Japan. Remote Sensing. 2020; 12(23):3992. https://doi.org/10.3390/rs12233992
Chicago/Turabian StyleZhang, Pengfei, Chong Xu, Siyuan Ma, Xiaoyi Shao, Yingying Tian, and Boyu Wen. 2020. "Automatic Extraction of Seismic Landslides in Large Areas with Complex Environments Based on Deep Learning: An Example of the 2018 Iburi Earthquake, Japan" Remote Sensing 12, no. 23: 3992. https://doi.org/10.3390/rs12233992
APA StyleZhang, P., Xu, C., Ma, S., Shao, X., Tian, Y., & Wen, B. (2020). Automatic Extraction of Seismic Landslides in Large Areas with Complex Environments Based on Deep Learning: An Example of the 2018 Iburi Earthquake, Japan. Remote Sensing, 12(23), 3992. https://doi.org/10.3390/rs12233992