Manual-Based Improvement Method for the ASTER Global Water Body Data Base



Abstract
1. Introduction
2. Improvement by GeoCover or CLAMS Images
2.1. Features of the GeoCover and CLAMS Images
2.2. How the Improved ASTWBD Was Created
- (1)
- (2)
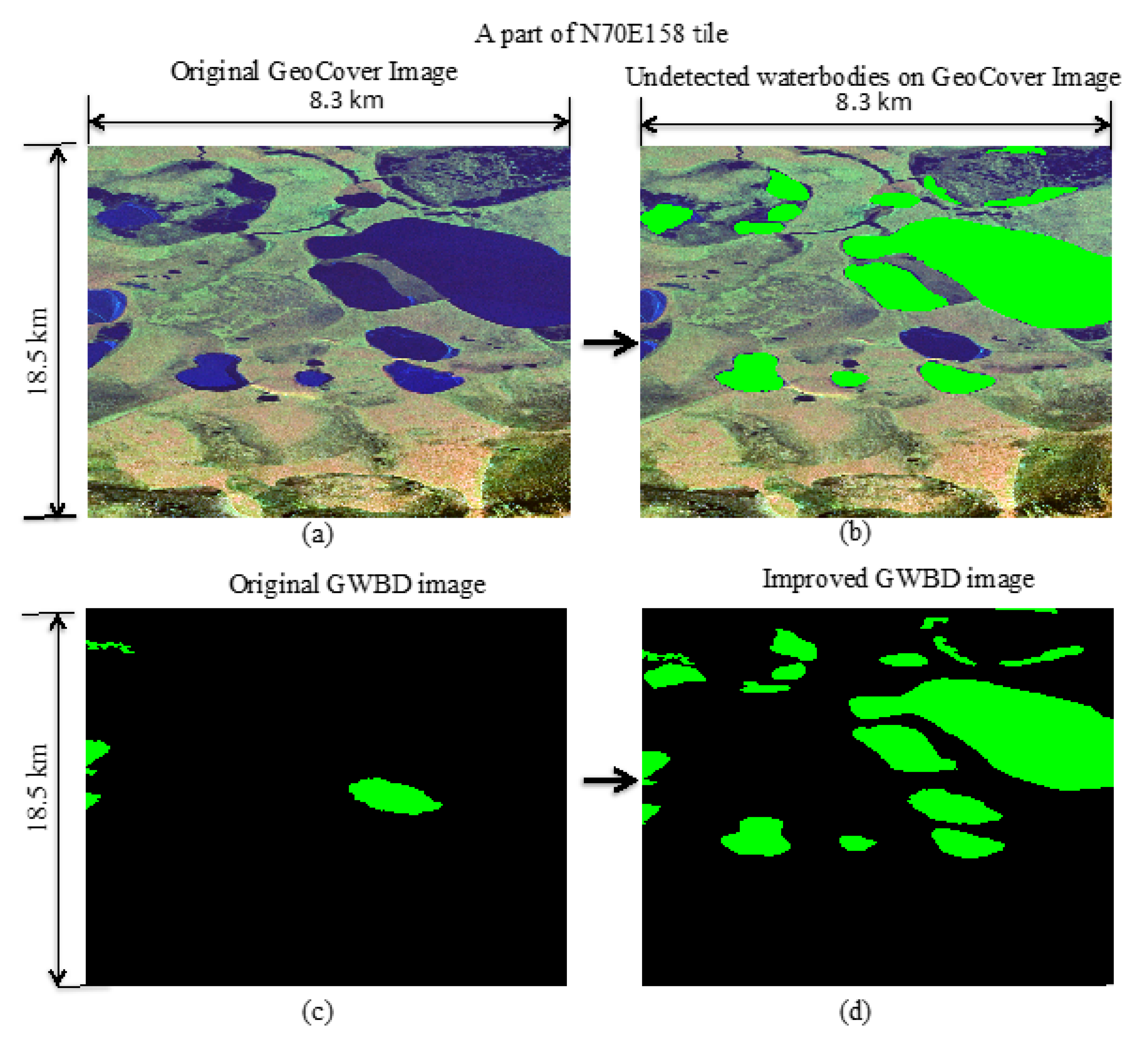
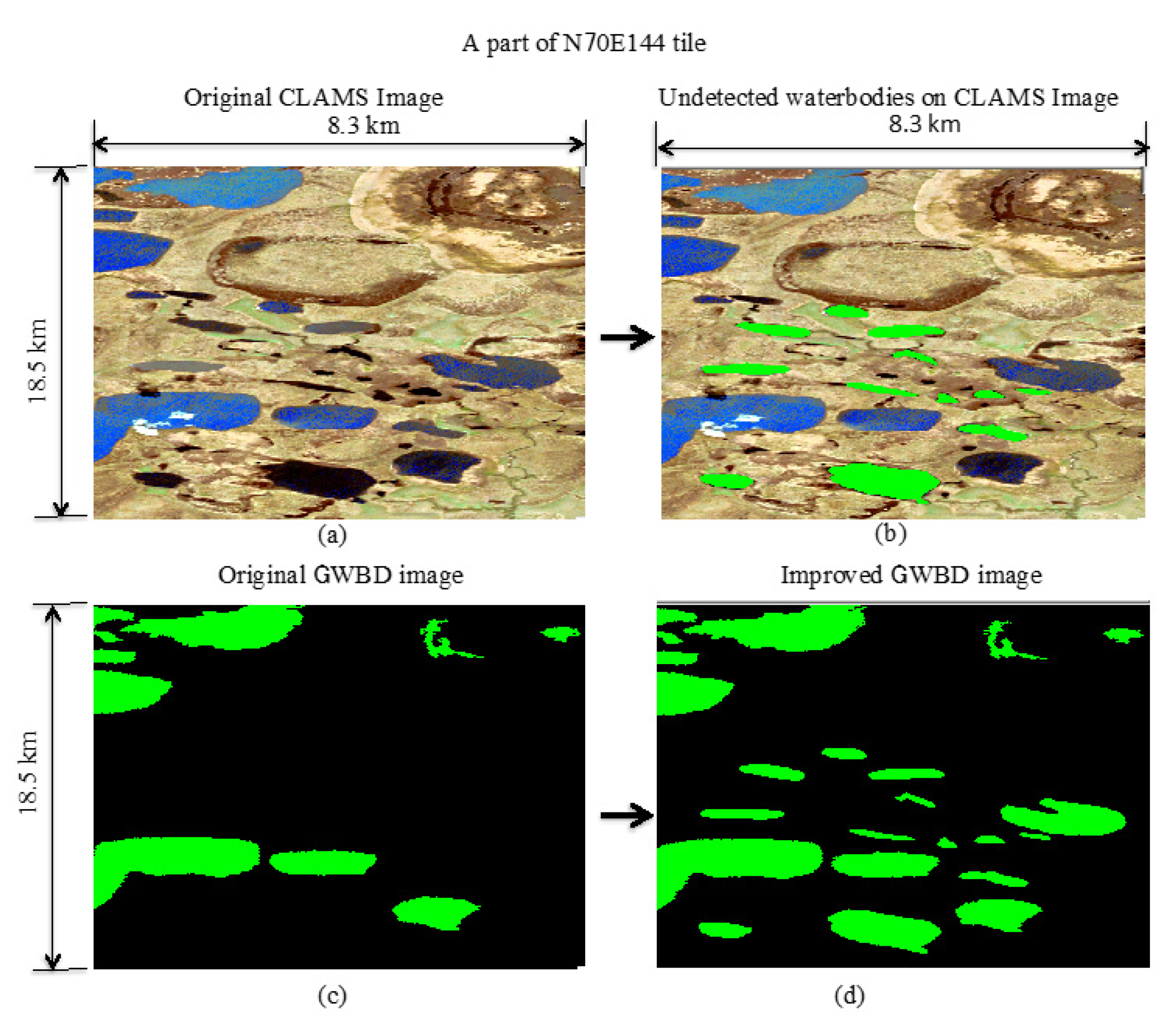
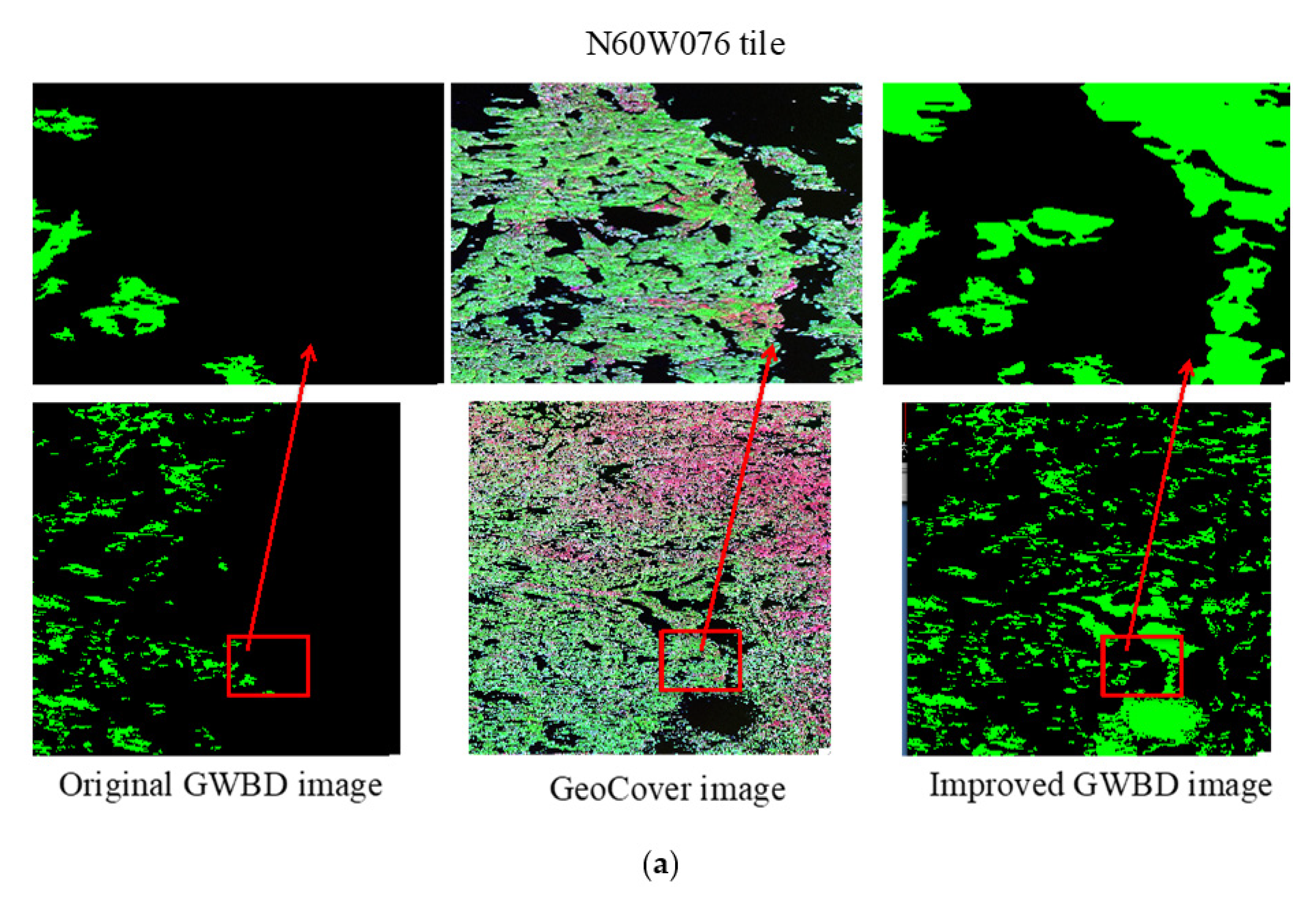
- The undetected water body areas are filled in green on the GeoCover image as shown in Figure 2b using the support tool “ROI”. The green color areas correspond to the undetected areas.
- (3)
- The undetected areas on the GeoCover image are imported to the GWBD image and saved as a GeoTIFF file using the support tool “Masking” function.
- (4)
- The final improved GWBD image is shown in Figure 2d.
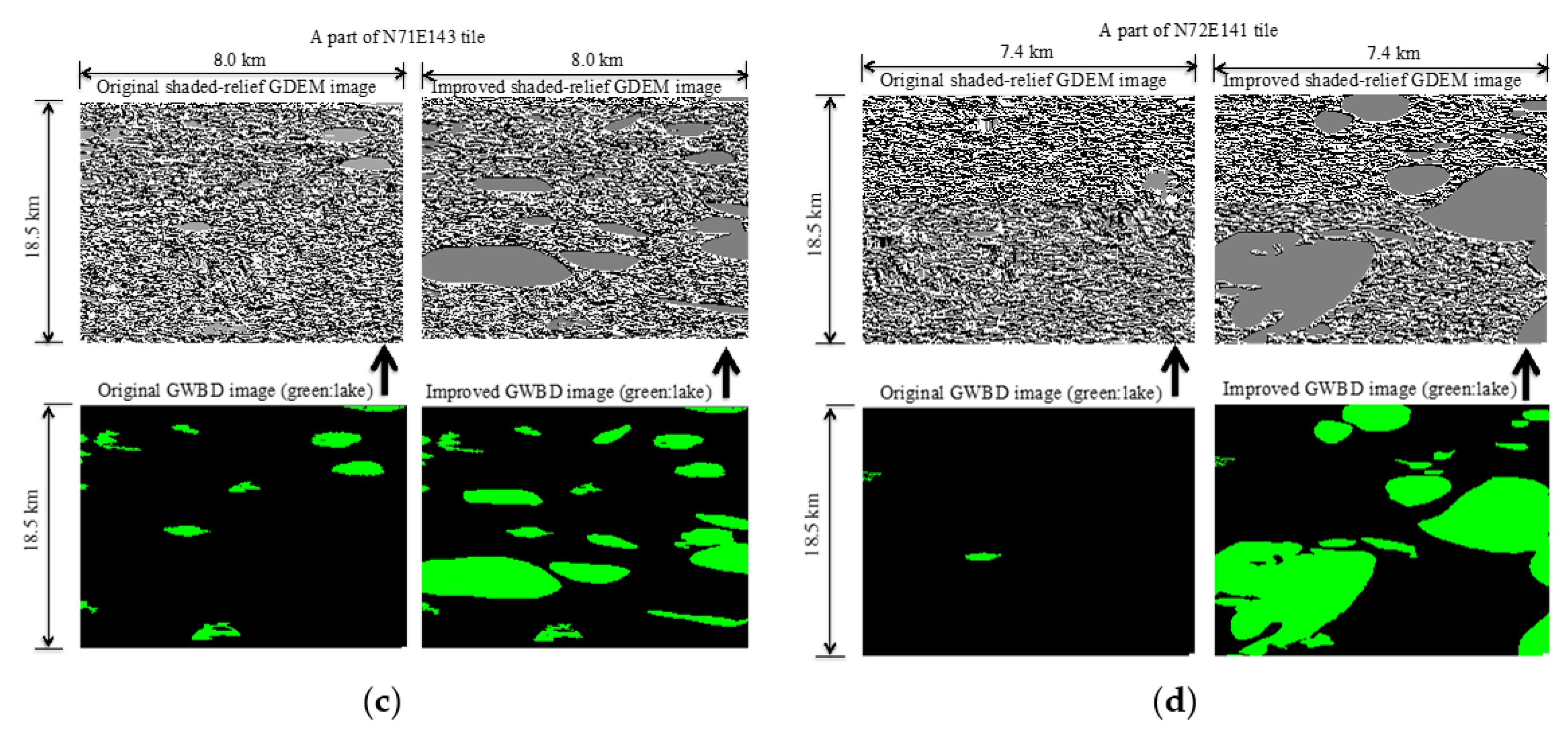
2.3. Typical Examples of Improvements
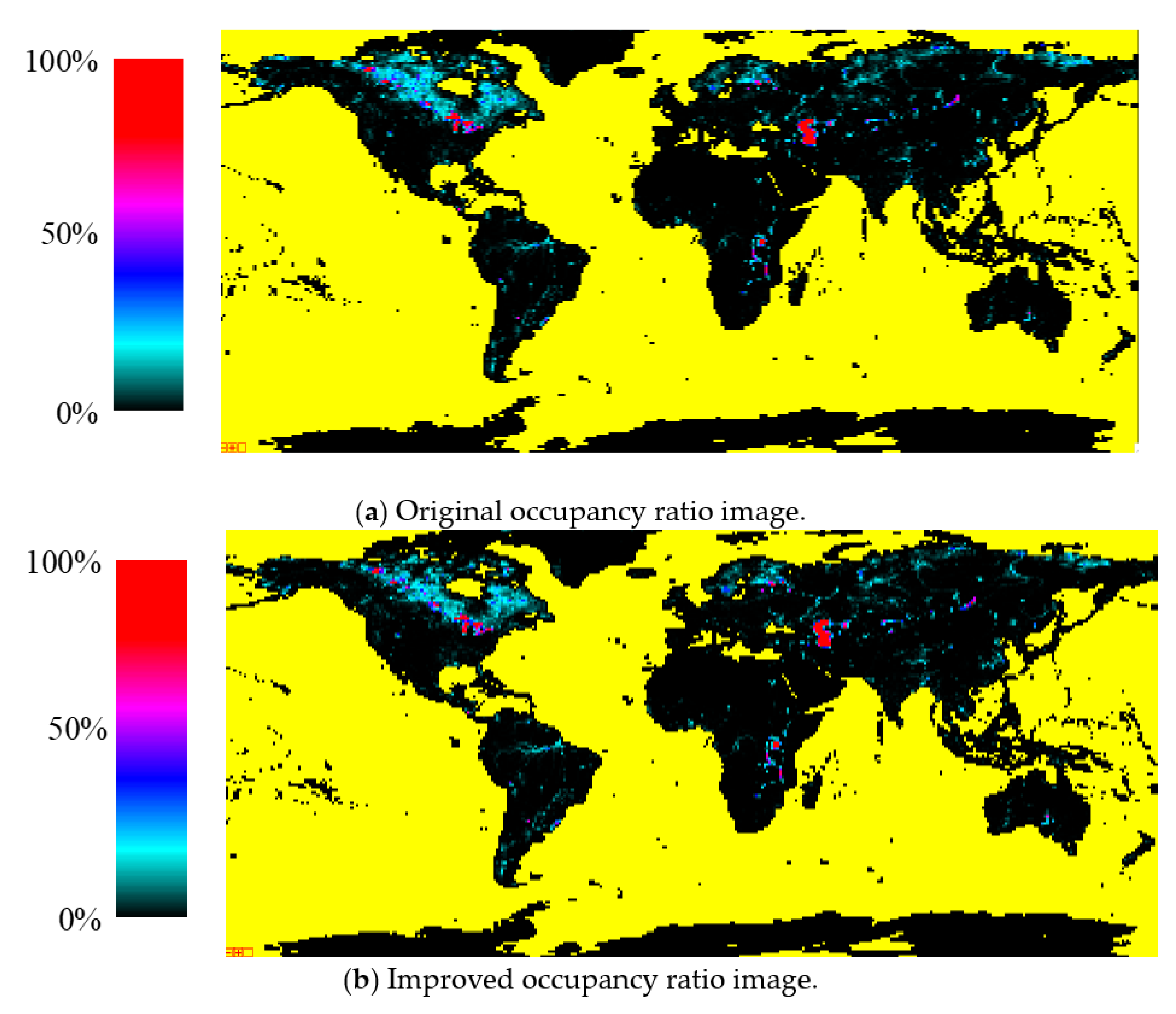
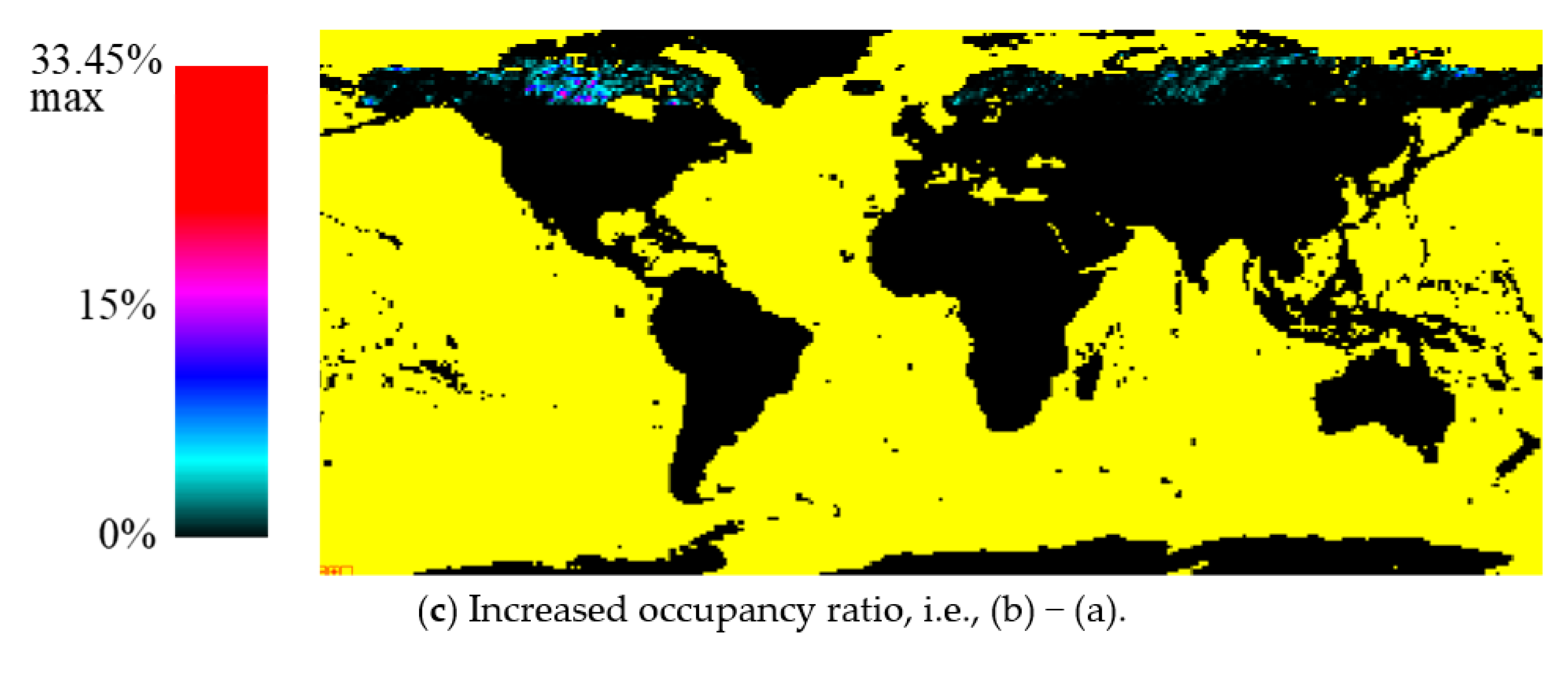
3. Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fujisada, H.; Sakuma, F.; Ono, A.; Kudos, M. Design and preflight performance of ASTER instrument protoflight model. IEEE Trans. Geosci. Remote Sens. 1999, 36, 1152–1160. [Google Scholar] [CrossRef]
- Fujisada, H. ASTER Level-1 data processing algorithm. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1101–1112. [Google Scholar] [CrossRef]
- Fujisada, H.; Bailey, G.B.; Kelly, G.G.; Hara, S.; Abrams, M.J. ASTER DEM performance. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2707–2714. [Google Scholar] [CrossRef]
- Fujisada, H.; Iwasaki, A.; Hara, S. ASTER stereo system performance. Proc. SPIE 2001, 4540, 39–49. [Google Scholar]
- Fujisada, H.; Urai, M.; Iwasaki, A. Advanced methodology for ASTER DEM generation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 5080–5091. [Google Scholar] [CrossRef]
- Fujisada, H.; Urai, M.; Iwasaki, A. Technical methodology for ASTER Global Water Body Data Base. Remote Sens. 2018, 10, 1860. [Google Scholar] [CrossRef]
- GeoCover. Available online: http://www.cr.chiba-u.jp/databases/GeoCover/TM_mosaic.html (accessed on 10 October 2020).
- Gonzalez, L.; Valerie, V.; Yamamoto, H. Global 15-Meter Mosaic from Simulated True-Color ASTER Imagery. Remote Sens. 2019, 11, 441. [Google Scholar] [CrossRef]
- Nelson, G.C.; Robertson, R.D. Comparing the GLC2000 and GeoCover LC land cover datasets for use in economic modelling of land use. Int. J. Remote Sens. 2007, 28, 4243–4266. [Google Scholar] [CrossRef]
- Rajagopalan, R.; Aparajithan, S.; James, S.; Michael, C. Validation of Geometric Accuracy of Global Land Survey (GLS) 2000 Data. Photogrametric Eng. Remote Sens. 2015, 81, 131–141. [Google Scholar]
- NASA JPL. NASA Shuttle Radar Topography Mission Water Body Data Shapefiles & Raster Files; NASA EOSDISL and Processes DAAC: Sioux Falls, SD, USA, 2013. [Google Scholar]
- Abrams, M.; Crippen, R.; Fujisada, H. ASTER Global Digital Elevation Model (GDEM) and ASTER Global Water Body Dataset (ASTWBD). Remote Sens. 2020, 12, 1156. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tile Name | Type of Images | Sea Occupancy (%) | River Occupancy (%) | Lake Occupancy (%) |
|---|---|---|---|---|
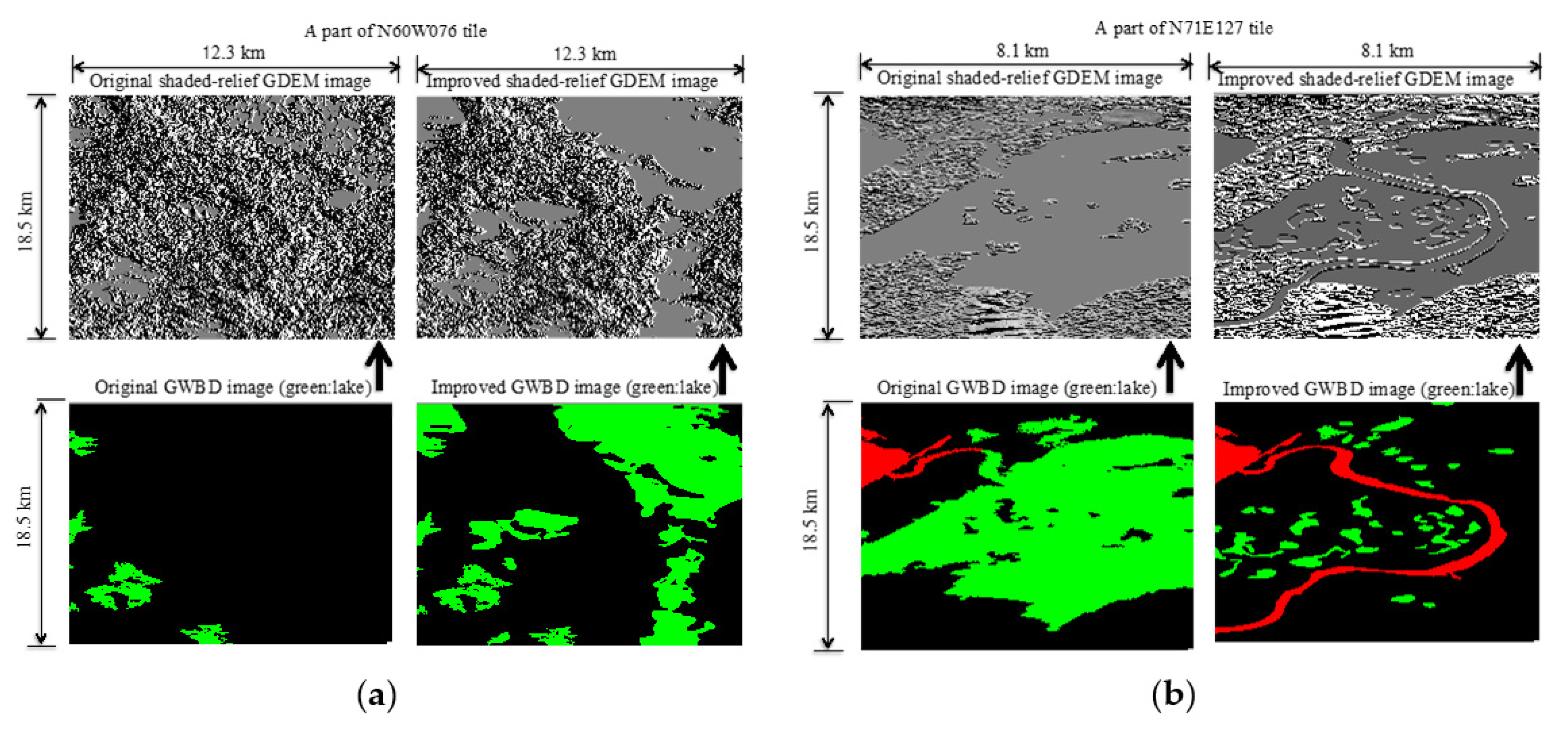
| N60W076 | Original image | 0 | 0 | 6.56163 |
| Improved image | 0 | 0 | 18.36819 | |
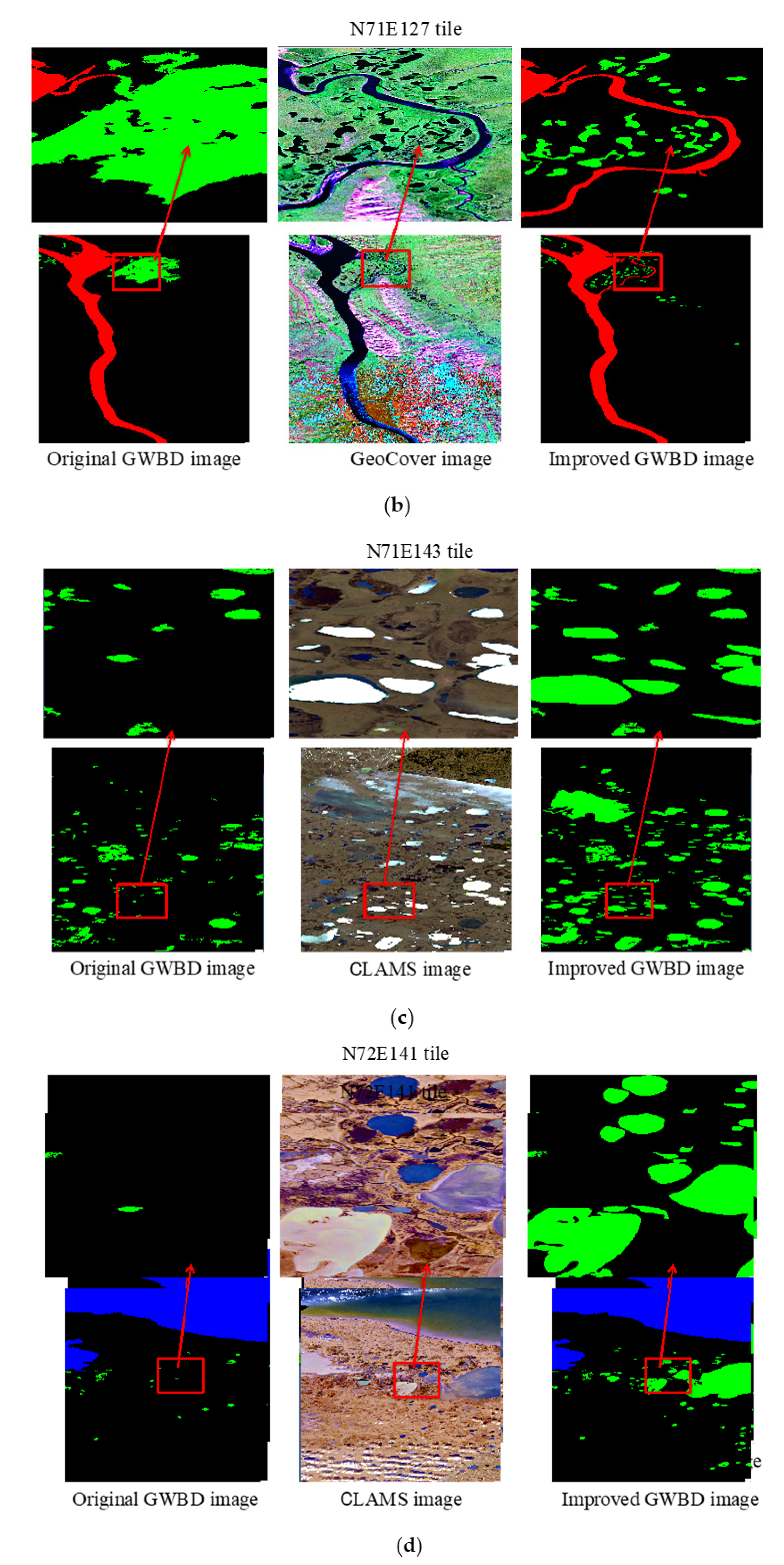
| N71E127 | Original image | 0 | 8.55893 | 2.52542 |
| Improved image | 0 | 8.81181 | 0.60127 | |
| N71E143 | Original image | 0 | 0 | 4.83586 |
| Improved image | 0 | 0 | 14.03497 | |
| N72E141 | Original image | 22.28395 | 0 | 0.38985 |
| Improved image | 22.28395 | 0 | 6.48122 |
| Tile Name | Location | Ratio (%) | Tile Name | Location | Ratio (%) | Tile Name | Location | Ratio (%) |
|---|---|---|---|---|---|---|---|---|
| N60E007 | Norway | 5.25127 | N64W095 | Canada | 6.79022 | N68W097 | Canada | 9.95321 |
| N61W098 | Canada | 5.28094 | N68E145 | Russia | 6.81613 | N71W109 | Canada | 10.13983 |
| N71E141 | Russia | 5.33550 | N65W097 | Canada | 6.87522 | N69W105 | Canada | 10.19871 |
| N72E097 | Russia | 5.39406 | N70W112 | Canada | 6.91013 | N61W164 | USA (Alaska) | 10.24639 |
| N60W100 | Canada | 5.40833 | N71W111 | Canada | 6.91214 | N70W111 | Canada | 10.55154 |
| N75E112 | Russia | 5.41753 | N69W125 | Canada | 6.92857 | N65W114 | Canada | 10.56258 |
| N72E142 | Russia | 5.45569 | N63W099 | Canada | 7.04038 | N66W098 | Canada | 10.64937 |
| N71E080 | Russia | 5.46514 | N68W090 | Canada | 7.06019 | N70W157 | USA (Alaska) | 10.67472 |
| N66W105 | Canada | 5.50322 | N71E140 | Russia | 7.16263 | N63W106 | Canada | 10.79045 |
| N70E078 | Russia | 5.52684 | N64W098 | Canada | 7.19305 | N70W154 | USA (Alaska) | 10.94286 |
| N69W098 | Canada | 5.54657 | N61W165 | USA (Alaska) | 7.28413 | N64W114 | Canada | 10.95453 |
| N67W115 | Canada | 5.56222 | N62W108 | Canada | 7.32367 | N63W097 | Canada | 11.10577 |
| N72W108 | Canada | 5.59931 | N63W118 | Canada | 7.38103 | N60W164 | USA (Alaska) | 11.20842 |
| N60W074 | Canada | 5.62596 | N61W099 | Canada | 7.43363 | N70E158 | USA (Alaska) | 11.25973 |
| N63W095 | Canada | 5.63278 | N67W126 | Canada | 7.62890 | N62W102 | Canada | 11.31035 |
| N60W165 | Russia | 5.63698 | N64W115 | Canada | 7.73903 | N62W101 | Canada | 11.33130 |
| N65W105 | Canada | 5.65309 | N71E096 | Russia | 7.76664 | N62W096 | Canada | 11.36850 |
| N61E008 | Norway | 5.67248 | N63W110 | Canada | 7.83731 | N64W108 | N64W108 | 11.47643 |
| N69W104 | Canada | 5.71586 | N62W109 | Canada | 7.95232 | N64W117 | N64W117 | 11.49349 |
| N69E124 | Russia | 5.76290 | N70W105 | Canada | 7.97608 | N68E154 | N68E154 | 11.64781 |
| N65W108 | Canada | 5.85980 | N62W104 | Canada | 8.03119 | N60W076 | N60W076 | 11.80715 |
| N70E079 | Russia | 5.87961 | N69E156 | Russia | 8.08248 | N70W156 | N70W156 | 12.06289 |
| N71E095 | Russia | 5.94174 | N70E159 | Russia | 8.08720 | N65W099 | N65W099 | 12.13787 |
| N61W075 | Canada | 5.94803 | N68W128 | Canada | 8.10427 | N69W113 | N69W113 | 12.33947 |
| N64W093 | Canada | 5.94889 | N63W096 | Canada | 8.13296 | N65W116 | N65W116 | 12.63866 |
| N70W106 | Canada | 5.95411 | N61W096 | Canada | 8.14558 | N63W109 | N63W109 | 12.69144 |
| N70W088 | Canada | 6.00687 | N65W115 | Canada | 8.22398 | N65W113 | N65W113 | 12.88074 |
| N70E150 | Russia | 6.02750 | N64W113 | Canada | 8.25485 | N65W117 | N65W117 | 13.15168 |
| N72E141 | Russia | 6.09137 | N67W105 | Canada | 8.51486 | N66W104 | N66W104 | 13.47813 |
| N63W094 | Canada | 6.09459 | N69E155 | Russia | 8.53566 | N72W107 | N72W107 | 13.65664 |
| N70E153 | Russia | 6.18505 | N72W106 | Canada | 8.75356 | N61W111 | N61W111 | 14.22826 |
| N61W139 | Canada | 6.22052 | N70W110 | Canada | 8.80408 | N61W101 | N61W101 | 14.36880 |
| N64E029 | Finland | 6.25783 | N68E071 | Russia | 8.83583 | N62W095 | N62W095 | 14.62151 |
| N65W104 | Canada | 6.27058 | N68W133 | Canada | 8.96451 | N61W104 | Canada | 14.89520 |
| N71W110 | Canada | 6.35164 | N67W107 | Canada | 8.98649 | N69W112 | Canada | 15.19103 |
| N64W096 | Canada | 6.41225 | N70W155 | USA (Alaska) | 9.00188 | N64W118 | Canada | 15.41963 |
| N61W095 | Canada | 6.44154 | N68E155 | Russia | 9.02434 | N62W100 | Canada | 15.48538 |
| N67W102 | Canada | 6.48683 | N70W153 | USA (Alaska) | 9.09714 | N65W100 | Canada | 15.50255 |
| N63W101 | Canada | 6.52677 | N67W104 | Canada | 9.14772 | N62W103 | Canada | 15.55613 |
| N69W111 | Canada | 6.57954 | N68E070 | Russia | 9.19645 | N66W103 | Canada | 16.04481 |
| N70W113 | Canada | 6.58299 | N71E143 | Russia | 9.19910 | N61W100 | Canada | 16.81194 |
| N64W109 | Canada | 6.59901 | N65W111 | Canada | 9.23940 | N61W103 | Canada | 17.00779 |
| N67W098 | Canada | 6.65046 | N74E107 | Russia | 9.33596 | N63W107 | Canada | 17.57145 |
| N65W098 | Canada | 6.65231 | N69E159 | Russia | 9.40438 | N66W099 | Canada | 17.66327 |
| N70W158 | USA (Alaska) | 6.69218 | N69E158 | Russia | 9.52341 | N60W075 | Canada | 18.45545 |
| N69E146 | USA (Alaska) | 6.70507 | N64W107 | Canada | 9.61353 | N63W108 | Canada | 18.94309 |
| N66W115 | Canada | 6.70820 | N67W106 | Canada | 9.67472 | N62W107 | Canada | 21.11334 |
| N65W157 | USA (Alaska) | 6.74008 | N67W103 | Canada | 9.82968 | N75E142 | Russia | 33.45049 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fujisada, H.; Urai, M.; Iwasaki, A. Manual-Based Improvement Method for the ASTER Global Water Body Data Base. Remote Sens. 2020, 12, 3373. https://doi.org/10.3390/rs12203373
Fujisada H, Urai M, Iwasaki A. Manual-Based Improvement Method for the ASTER Global Water Body Data Base. Remote Sensing. 2020; 12(20):3373. https://doi.org/10.3390/rs12203373
Chicago/Turabian StyleFujisada, Hiroyuki, Minoru Urai, and Akira Iwasaki. 2020. "Manual-Based Improvement Method for the ASTER Global Water Body Data Base" Remote Sensing 12, no. 20: 3373. https://doi.org/10.3390/rs12203373
APA StyleFujisada, H., Urai, M., & Iwasaki, A. (2020). Manual-Based Improvement Method for the ASTER Global Water Body Data Base. Remote Sensing, 12(20), 3373. https://doi.org/10.3390/rs12203373