Potential and Limitations of Satellite Altimetry Constellations for Monitoring Surface Water Storage Changes—A Case Study in the Mississippi Basin

 , , and
, , and
Abstract
1. Introduction
2. Study Area and Input Data
2.1. Mississippi River Basin
2.2. Satellite Altimetry Data
2.3. Water Occurrence Masks
2.4. Global Lakes and Wetlands Database
2.5. Water Volumes from WaterGAP
3. Method: Automated Target Detection
3.1. Morphological Operations
3.2. Lake Shapes for Different Water Occurrences
3.3. Removal of Rivers and Coastal Data
3.4. Connection to Satellite Altimetry Data
4. Results
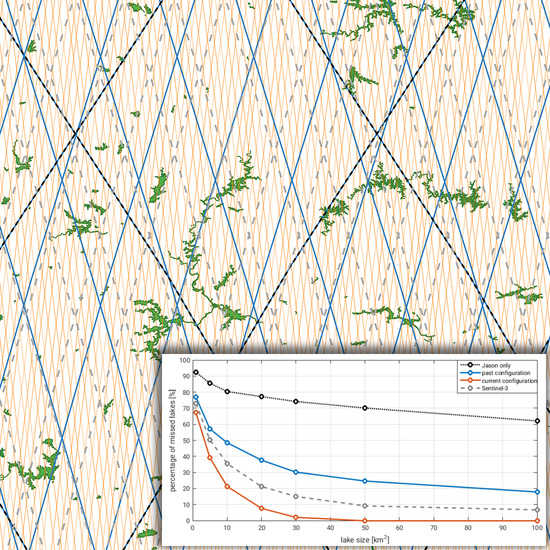
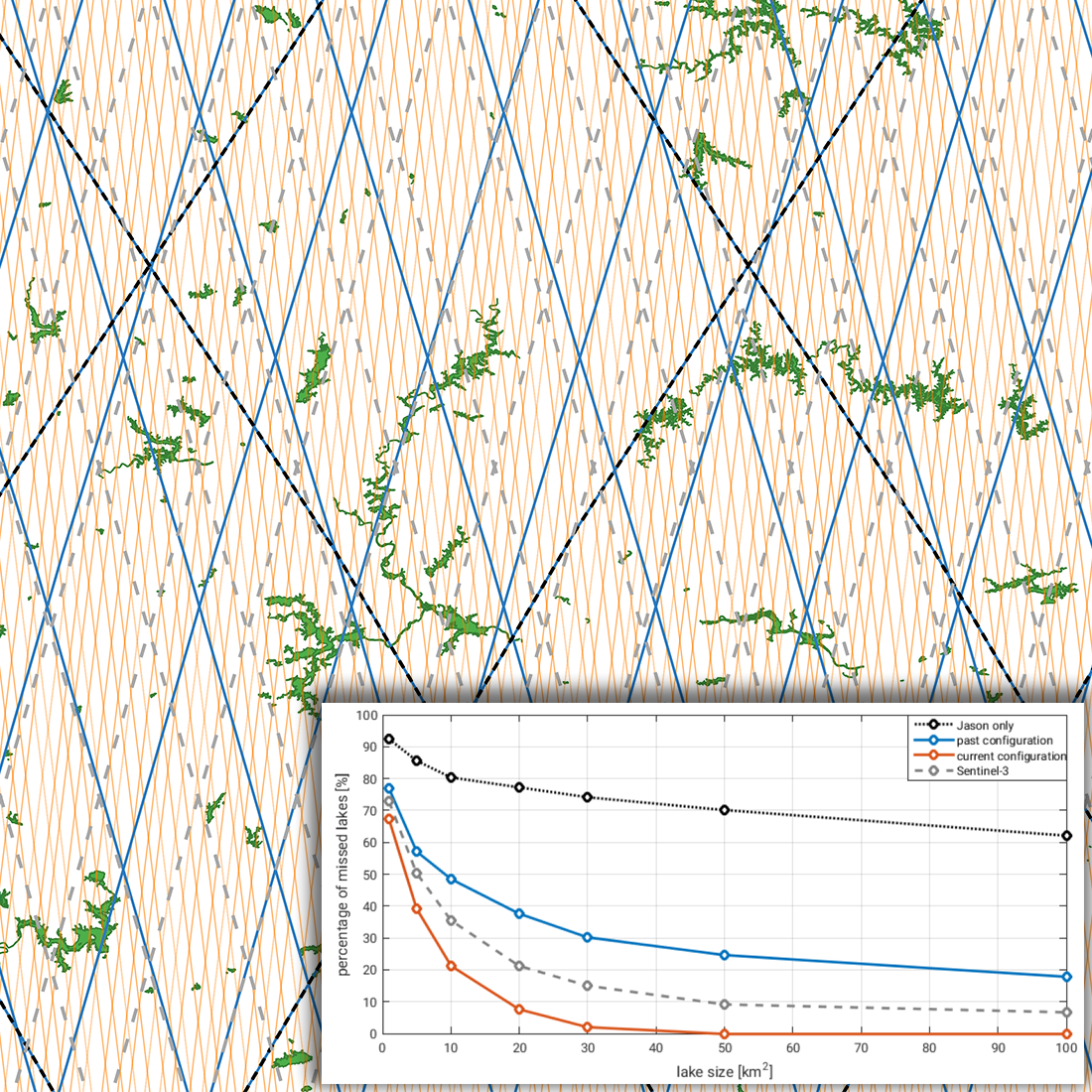
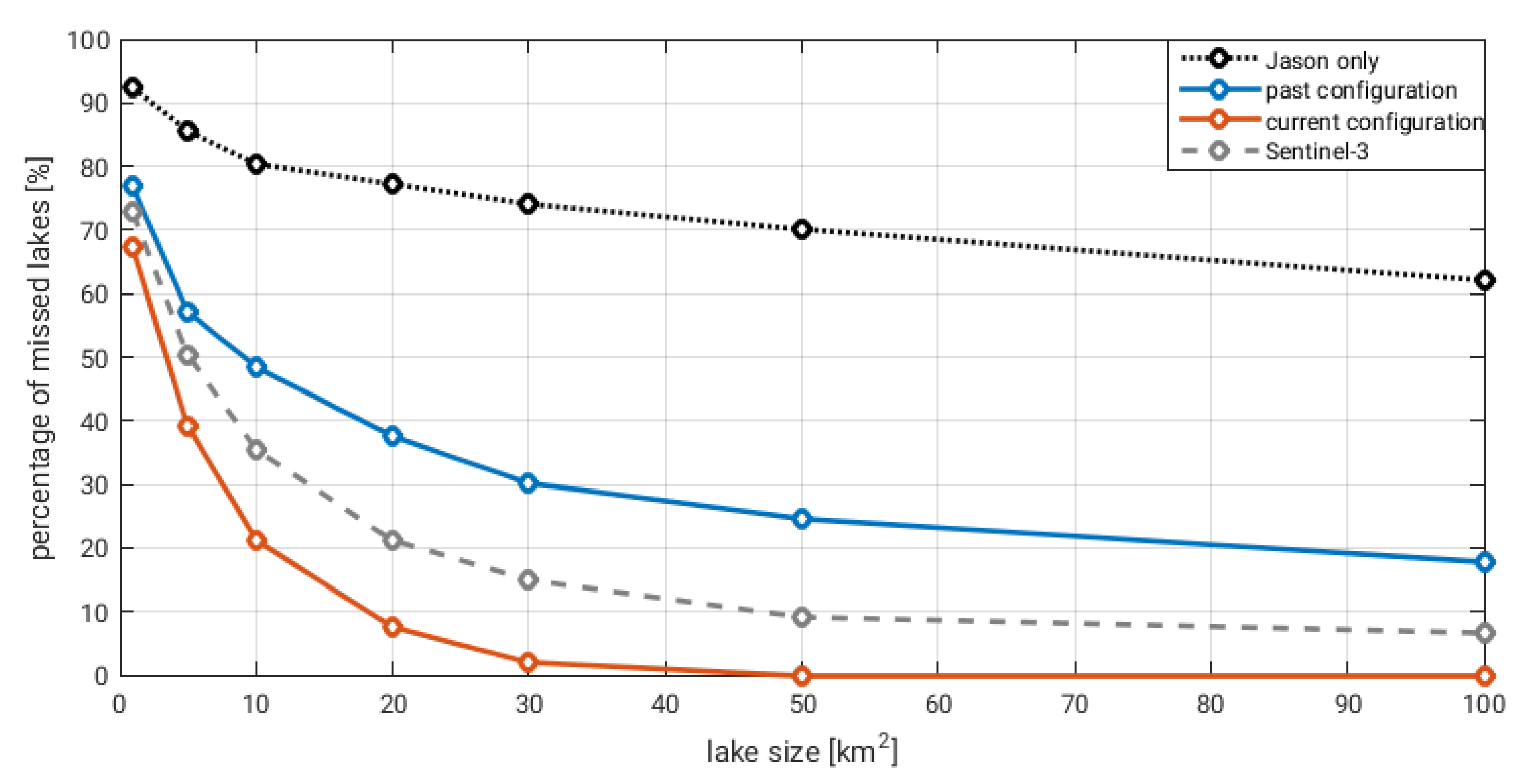
4.1. Water Bodies Monitored by Different Altimetry Configurations
- Jason only;
- Sentinel-3 only (both satellites);
- Jason and Envisat (past configuration);
- Jason and Sentinel-3 and Cryosat-2 and Saral-DP (current configuration).
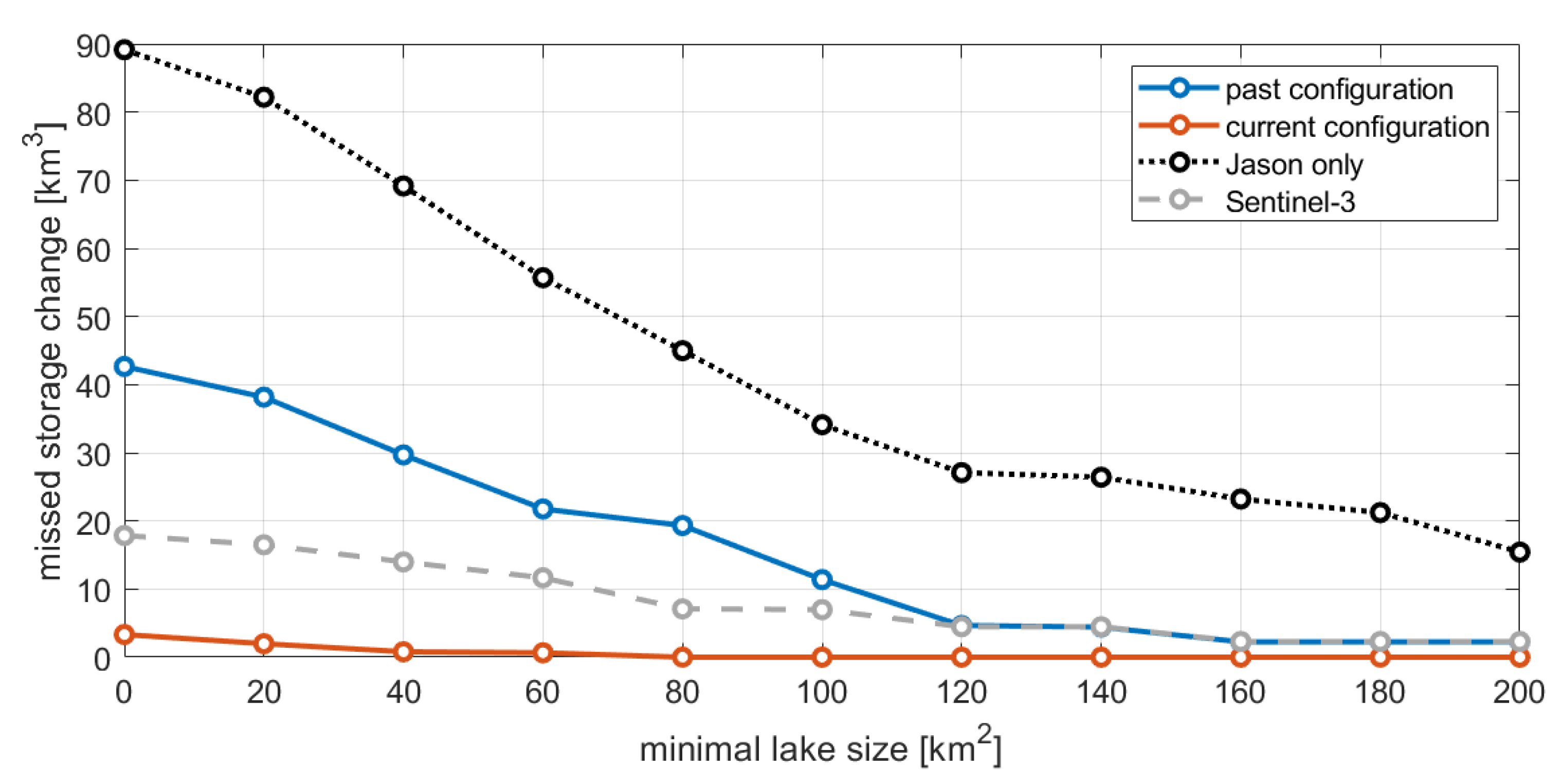
4.2. Surface Water Storage
5. Discussion
5.1. Assessment of Automated Target Detection
5.2. Impact of Different Water Occurrences
5.3. Impact of Neglecting Rivers and Smaller Lakes that Are Not Available in WGHM
5.4. Limitations of Satellite Altimetry Height Estimation
5.5. Outlook for SWOT
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Flowchart of developed target detection method

References
- Shiklomanov, I. World fresh water resources. In Water in Crisis: A Guide to the World’s Fresh Water Resources; Gleick, P., Ed.; Oxford Universtity Press: Oxford, UK, 1993; pp. 13–23. [Google Scholar]
- Müller Schmied, H.; Eisner, S.; Franz, D.; Wattenbach, M.; Portmann, F.T.; Flörke, M.; Döll, P. Sensitivity of simulated global-scale freshwater fluxes and storages to input data, hydrological model structure, human water use and calibration. Hydrol. Earth Syst. Sci. 2014, 18, 3511–3538. [Google Scholar] [CrossRef]
- Döll, P.; Douville, H.; Güntner, A.; Müller Schmied, H.; Wada, Y. Modelling Freshwater Resources at the Global Scale: Challenges and Prospects. Surv. Geophys. 2016, 37, 195–221. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Rodríguez, E.; Lettenmaier, D.P. Measuring surface water from space. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Zaitchik, B.F.; Rodell, M.; Reichle, R.H. Assimilation of GRACE Terrestrial Water Storage Data into a Land Surface Model: Results for the Mississippi River Basin. J. Hydrometeorol. 2008, 9, 535–548. [Google Scholar] [CrossRef]
- Gao, H. Satellite remote sensing of large lakes and reservoirs: From elevation and area to storage. WIREs Water 2015, 2, 147–157. [Google Scholar] [CrossRef]
- Busker, T.; de Roo, A.; Gelati, E.; Schwatke, C.; Adamovic, M.; Bisselink, B.; Pekel, J.F.; Cottam, A. A global lake and reservoir volume analysis using a surface water dataset and satellite altimetry. Hydrol. Earth Syst. Sci. 2019, 23, 669–690. [Google Scholar] [CrossRef]
- Schwatke, C.; Dettmering, D.; Seitz, F. Volume Variations of Small Inland Water Bodies from a Combination of Satellite Altimetry and Optical Imagery. Remote Sens. 2020, 12, 1606. [Google Scholar] [CrossRef]
- Lehner, B.; Döll, P. Development and validation of a global database of lakes, reservoirs and wetlands. J. Hydrol. 2004, 296, 1–22. [Google Scholar] [CrossRef]
- Carroll, M.; DiMiceli, C.; Wooten, M.; Hubbard, A.; Sohlberg, R.; Townshend, J. MOD44W MODIS/Terra Land Water Mask Derived from MODIS and SRTM L3 Global 250m SIN Grid V006 [Data set]; NASA Earth Observing System Data and Information System Land Process Distributed Active Archive Centers: Sioux Falls, SD, USA, 2017. [CrossRef]
- Marshall, A.; Deng, X. Image Analysis for Altimetry Waveform Selection Over Heterogeneous Inland Waters. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1198–1202. [Google Scholar] [CrossRef]
- Biswas, N.K.; Hossain, F.; Bonnema, M.; Okeowo, M.A.; Lee, H. An altimeter height extraction technique for dynamically changing rivers of South and South-East Asia. Remote Sens. Environ. 2019, 221, 24–37. [Google Scholar] [CrossRef]
- Elmi, O.; Tourian, M.J.; Sneeuw, N. Dynamic River Masks from Multi-Temporal Satellite Imagery: An Automatic Algorithm Using Graph Cuts Optimization. Remote Sens. 2016, 8, 1005. [Google Scholar] [CrossRef]
- Prigent, C.; Papa, F.; Aires, F.; Rossow, W.B.; Matthews, E. Global inundation dynamics inferred from multiple satellite observations, 1993–2000. J. Geophys. Res. 2007, 112, D12107. [Google Scholar] [CrossRef]
- Dettmering, D.; Schwatke, C.; Boergens, E.; Seitz, F. Potential of ENVISAT Radar Altimetry for Water Level Monitoring in the Pantanal Wetland. Remote Sens. 2016, 8, 596. [Google Scholar] [CrossRef]
- Durand, M.; Fu, L.L.; Lettenmaier, D.P.; Alsdorf, D.E.; Rodriguez, E.; Esteban-Fernandez, D. The Surface Water and Ocean Topography Mission: Observing Terrestrial Surface Water and Oceanic Submesoscale Eddies. Proc. IEEE 2010, 98, 766–779. [Google Scholar] [CrossRef]
- Niebling, W.; Baker, J.; Kasuri, L.; Katz, S.; Smet, K. Challenge and response in the Mississippi River Basin. Water Policy 2014, 16, 87–116. [Google Scholar] [CrossRef]
- Mississippi River Facts. Available online: https://www.nps.gov/miss/riverfacts.htm (accessed on 7 July 2020).
- Lehner, B.; Liermann, C.R.; Revenga, C.; Vörösmarty, C.; Fekete, B.; Crouzet, P.; Döll, P.; Endejan, M.; Frenken, K.; Magome, J.; et al. High-resolution mapping of the world’s reservoirs and dams for sustainable river-flow management. Front. Ecol. Environ. 2011, 9, 494–502. [Google Scholar] [CrossRef]
- Chelton, D.; Ries, J.; Haines, B.; Fu, L.L.; Callahan, P. Satellite Altimetry and Earth Sciences. A Handbook of Techniques and Applications; Academic Press: Cambridge, MA, USA, 2001; Chapter Satellite Altimetry. [Google Scholar]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Müller Schmied, H.; Cáceres, D.; Eisner, S.; Flörke, M.; Herbert, C.; Niemann, C.; Peiris, T.A.; Popat, E.; Portmann, F.T.; Reinecke, R.; et al. The global water resources and use model WaterGAP v2.2d: Model description and evaluation. Geosci. Model Dev. Discuss. 2020, 2020, 1–69. [Google Scholar] [CrossRef]
- Döll, P.; Fiedler, K.; Zhang, J. Global-scale analysis of river flow alterations due to water withdrawals and reservoirs. Hydrol. Earth Syst. Sci. 2009, 13, 2413–2432. [Google Scholar] [CrossRef]
- Lehner, B.; Verdin, K.; Jarvis, A. New Global Hydrography Derived From Spaceborne Elevation Data. Eos Trans. Am. Geophys. Union 2008, 89, 93. [Google Scholar] [CrossRef]
- Schwatke, C.; Scherer, D.; Dettmering, D. Automated Extraction of Consistent Time-Variable Water Surfaces of Lakes and Reservoirs Based on Landsat and Sentinel-2. Remote Sens. 2019, 11, 1010. [Google Scholar] [CrossRef]
- Verpoorter, C.; Kutser, T.; Seekell, D.A.; Tranvik, L.J. A global inventory of lakes based on high-resolution satellite imagery. Geophys. Res. Lett. 2014, 41, 6396–6402. [Google Scholar] [CrossRef]
- Feng, M.; Sexton, J.O.; Channan, S.; Townshend, J.R. A global, high-resolution (30-m) inland water body dataset for 2000: First results of a topographic–spectral classification algorithm. Int. J. Digit. Earth 2016, 9, 113–133. [Google Scholar] [CrossRef]
- Bovik, A.C. Basic Binary Image Processing. In The Essential Guide to Image Processing; Elsevier: Amsterdam, The Netherlands, 2009; pp. 69–96. [Google Scholar] [CrossRef]
- Garcia-Castellanos, D.; Lombardo, U. Poles of inaccessibility: A calculation algorithm for the remotest places on earth. Scott. Geogr. J. 2007, 123, 227–233. [Google Scholar] [CrossRef]
- Li, Y.; Gao, H.; Zhao, G.; Tseng, K.H. A high-resolution bathymetry dataset for global reservoirs using multi-source satellite imagery and altimetry. Remote Sens. Environ. 2020, 244, 111831. [Google Scholar] [CrossRef]
- Tortini, R.; Noujdina, N.; Yeo, S.; Ricko, M.; Birkett, C.M.; Khandelwal, A.; Kumar, V.; Marlier, M.E.; Lettenmaier, D.P. Satellite-based remote sensing data set of global surface water storage change from 1992 to 2018. Earth Syst. Sci. Data 2020, 12, 1141–1151. [Google Scholar] [CrossRef]
- Gleick, P. Water resources. In Encyclopedia of Climate and Weather; Schneider, S., Ed.; Oxford Universtity Press: Oxford, UK, 1996; pp. 817–823. [Google Scholar]
- Downing, J.A.; Prairie, Y.T.; Cole, J.J.; Duarte, C.M.; Tranvik, L.J.; Striegl, R.G.; McDowell, W.H.; Kortelainen, P.; Caraco, N.F.; Melack, J.M.; et al. The global abundance and size distribution of lakes, ponds, and impoundments. Limnol. Oceanogr. 2006, 51, 2388–2397. [Google Scholar] [CrossRef]
- Biancamaria, S.; Andreadis, K.M.; Durand, M.; Clark, E.A.; Rodriguez, E.; Mognard, N.M.; Alsdorf, D.E.; Lettenmaier, D.P.; Oudin, Y. Preliminary Characterization of SWOT Hydrology Error Budget and Global Capabilities. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 6–19. [Google Scholar] [CrossRef]
- Baup, F.; Frappart, F.; Maubant, J. Combining high-resolution satellite images and altimetry to estimate the volume of small lakes. Hydrol. Earth Syst. Sci. 2014, 18, 2007–2020. [Google Scholar] [CrossRef]
- Biancamaria, S.; Frappart, F.; Leleu, A.S.; Marieu, V.; Blumstein, D.; Desjonquères, J.D.; Boy, F.; Sottolichio, A.; Valle-Levinson, A. Satellite radar altimetry water elevations performance over a 200m wide river: Evaluation over the Garonne River. Adv. Space Res. 2017, 59, 128–146. [Google Scholar] [CrossRef]
- Schwatke, C.; Dettmering, D.; Bosch, W.; Seitz, F. DAHITI—an innovative approach for estimating water level time series over inland waters using multi-mission satellite altimetry. Hydrol. Earth Syst. Sci. 2015, 19, 4345–4364. [Google Scholar] [CrossRef]
- Fjørtoft, R.; Gaudin, J.; Pourthié, N.; Lalaurie, J.; Mallet, A.; Nouvel, J.; Martinot-Lagarde, J.; Oriot, H.; Borderies, P.; Ruiz, C.; et al. KaRIn on SWOT: Characteristics of Near-Nadir Ka-Band Interferometric SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2172–2185. [Google Scholar] [CrossRef]
- Biancamaria, S.; Lettenmaier, D.P.; Pavelsky, T.M. The SWOT Mission and Its Capabilities for Land Hydrolog. Surv. Geophys. 2016, 37, 307–337. [Google Scholar] [CrossRef]
- Solander, K.C.; Reager, J.T.; Famiglietti, J.S. How well will the Surface Water and Ocean Topography (SWOT) mission observe global reservoirs? Water Resour. Res. 2016, 52, 2123–2140. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbit | Missions | Period | Heigth | Repeat Cycle | Track Dist. |
|---|---|---|---|---|---|
| [km] | [days] | at Equator [km] | |||
| Jason | TOPEX, Jason-1/2/3 | 1992-today | 1336 | 9.9 | 315 |
| Envisat | ERS-1/2, Envisat, Saral | 1991–2010/2013–2016 | 800 | 35 | 80 |
| Sentinel-3A | Sentinel-3A | 2016-today | 815 | 27 | 104 |
| Sentinel-3B | Sentinel-3B | 2018-today | 815 | 27 | 104 |
| Cryosat-2 | Cryosat-2 | 2010-today | 717 | 369 | 8 |
| Saral-DP | Saral-DP | 2016-today | changing | drifting | irregular |
| Scenario | Number of Targets | Area of Targets in km | Mean Size of Targets in km |
|---|---|---|---|
| Jason only | 212 (4.7%) | 9125 (31.3%) | 43.0 |
| Sentinel-3A/B | 704 (15.5%) | 20,893 (71.7%) | 29.7 |
| Past configuration | 612 (13.5%) | 18,090 (62.0%) | 29.6 |
| Current configuration | 853 (18.8%) | 23,110 (79.3%) | 27.1 |
| Scenario | Number of Targets | Water Volume Variation | Mean Variations | Mean Size |
|---|---|---|---|---|
| in km | in km | in km | ||
| Jason only | 29 (22.8%) | 90.6 (50.4%) | 3.13 | 224.2 |
| Sentinel-3A/B | 97 (76.4%) | 161.9 (90.1%) | 1.67 | 129.7 |
| Past configuration | 71 (55.9%) | 137.1 (76.3%) | 1.93 | 158.5 |
| Current configuration | 116 (91.3%) | 176.5 (98.1%) | 1.52 | 123.9 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dettmering, D.; Ellenbeck, L.; Scherer, D.; Schwatke, C.; Niemann, C. Potential and Limitations of Satellite Altimetry Constellations for Monitoring Surface Water Storage Changes—A Case Study in the Mississippi Basin. Remote Sens. 2020, 12, 3320. https://doi.org/10.3390/rs12203320
Dettmering D, Ellenbeck L, Scherer D, Schwatke C, Niemann C. Potential and Limitations of Satellite Altimetry Constellations for Monitoring Surface Water Storage Changes—A Case Study in the Mississippi Basin. Remote Sensing. 2020; 12(20):3320. https://doi.org/10.3390/rs12203320
Chicago/Turabian StyleDettmering, Denise, Laura Ellenbeck, Daniel Scherer, Christian Schwatke, and Christoph Niemann. 2020. "Potential and Limitations of Satellite Altimetry Constellations for Monitoring Surface Water Storage Changes—A Case Study in the Mississippi Basin" Remote Sensing 12, no. 20: 3320. https://doi.org/10.3390/rs12203320
APA StyleDettmering, D., Ellenbeck, L., Scherer, D., Schwatke, C., & Niemann, C. (2020). Potential and Limitations of Satellite Altimetry Constellations for Monitoring Surface Water Storage Changes—A Case Study in the Mississippi Basin. Remote Sensing, 12(20), 3320. https://doi.org/10.3390/rs12203320