Short-Range Elastic Backscatter Micro-Lidar for Quantitative Aerosol Profiling with High Range and Temporal Resolution



Abstract
1. Introduction
2. Material and Methods
2.1. Framework
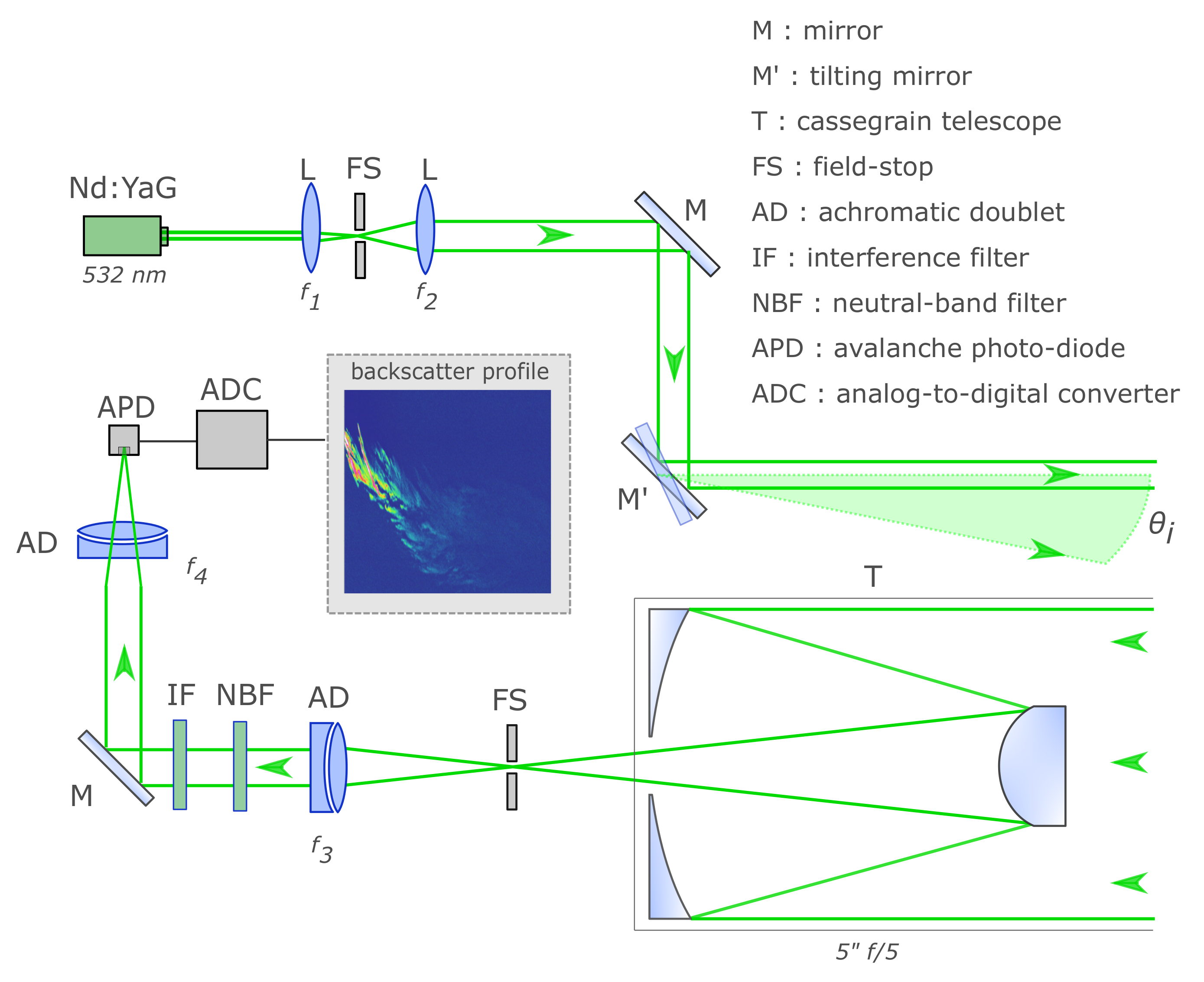
2.2. System
- (i)
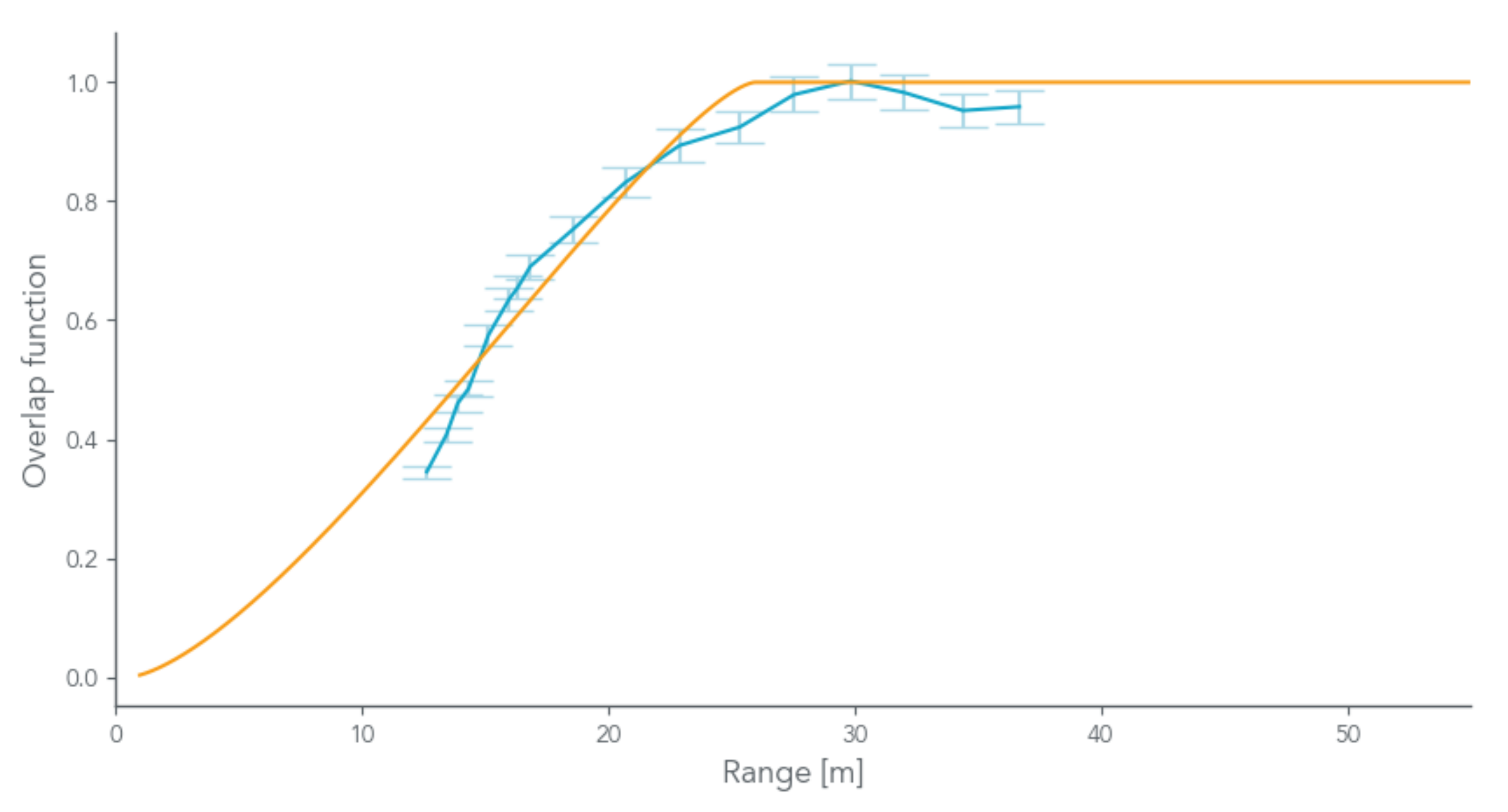
- Geometric calibration, which is necessary for determining the overlap function of the lidar, especially in the short-range;
- (ii)
- Radiometric calibration, which is required for retrieving the attenuated backscatter profiles and to use dedicated inverse methods that do not require any knowledge of boundary conditions or reference zone (e.g., Fernald–Klett methods).
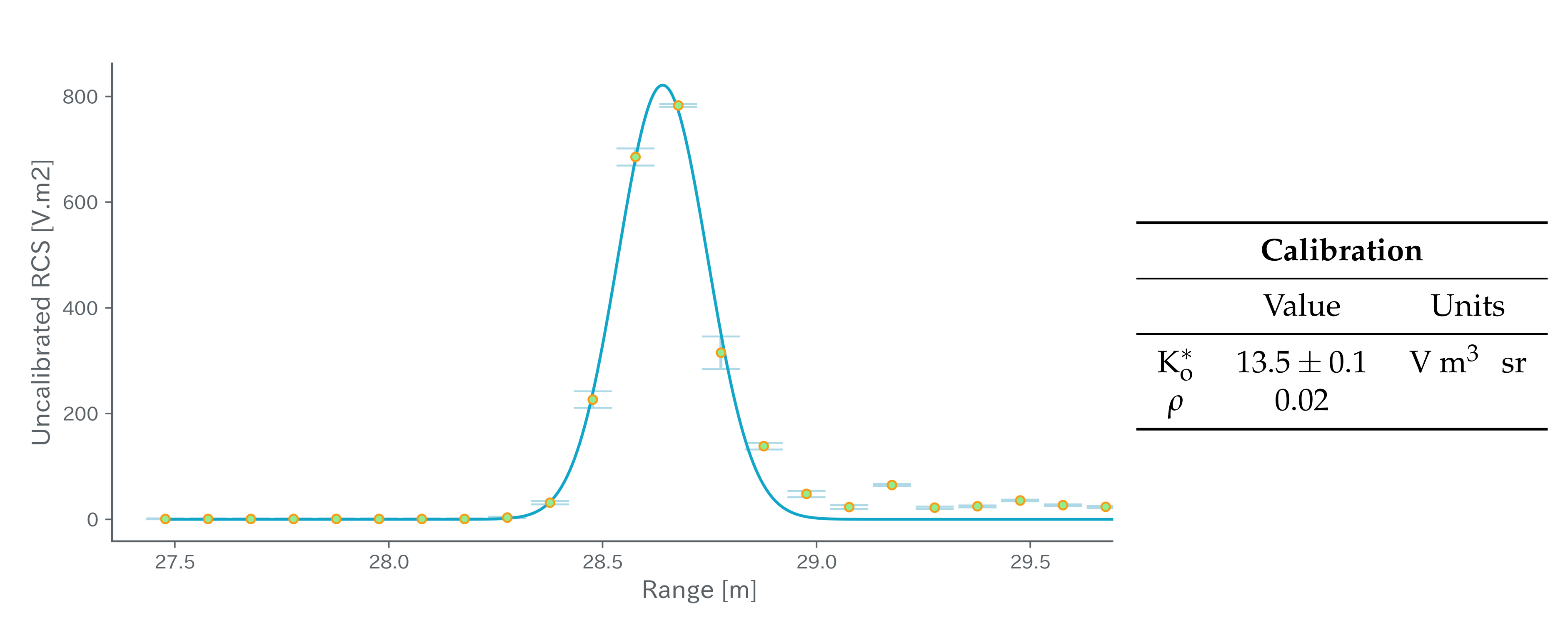
2.3. Calibration
2.4. Inversion
3. Results
3.1. Experimental Setup
3.2. Prior Light-Scattering Calculations
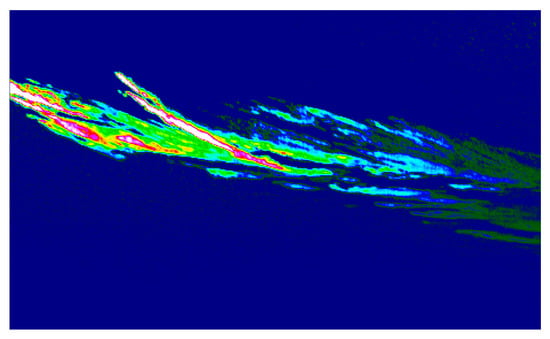
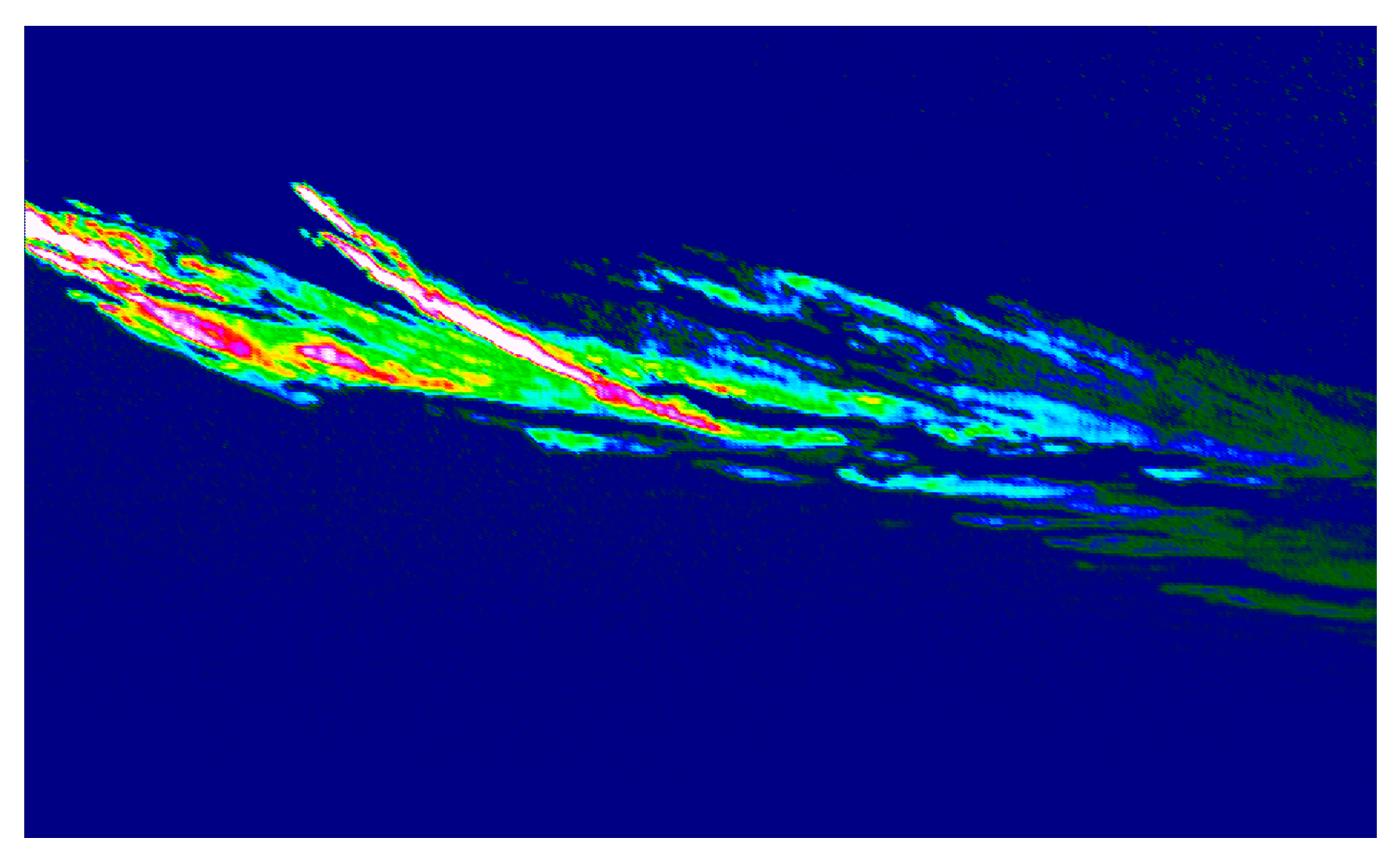
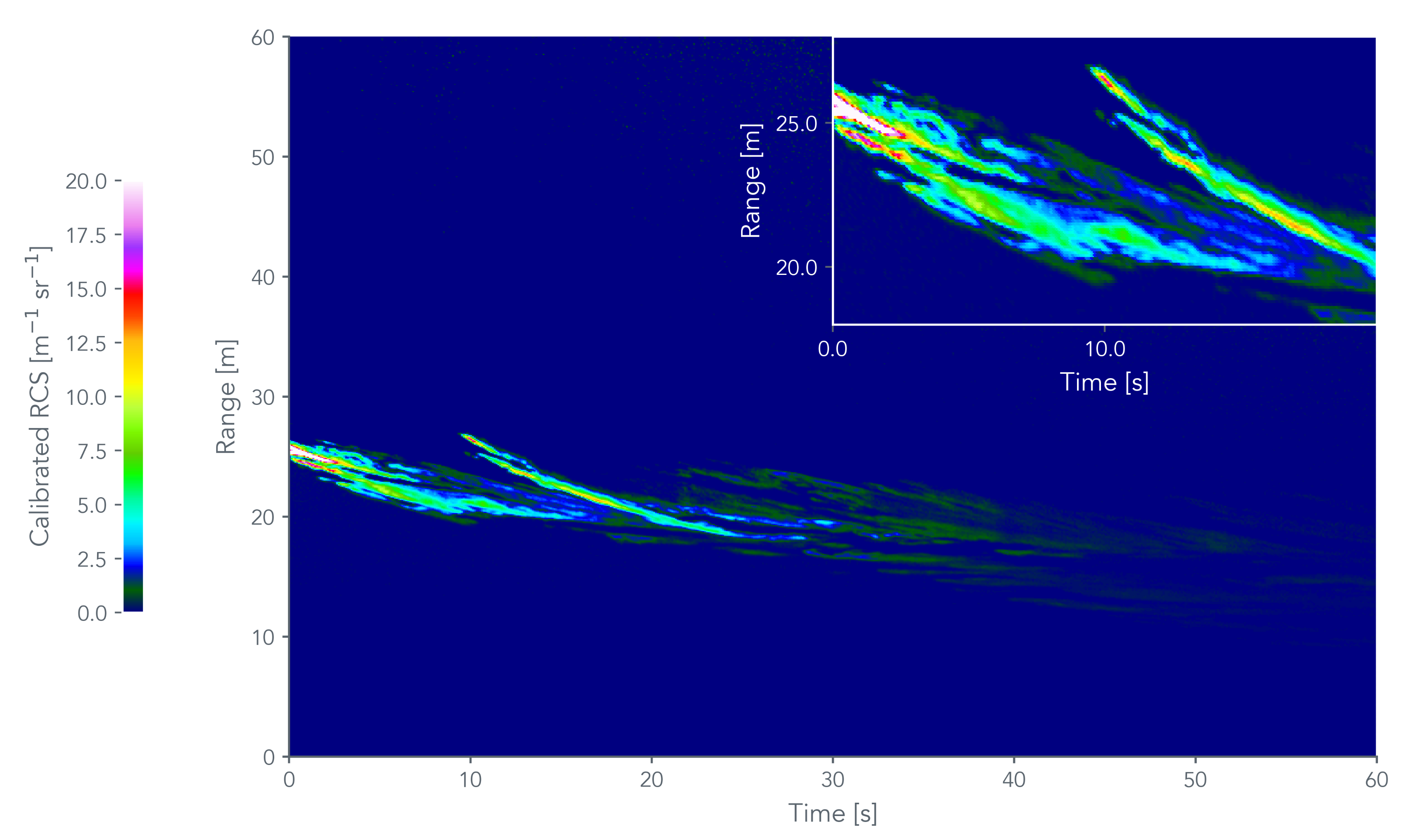
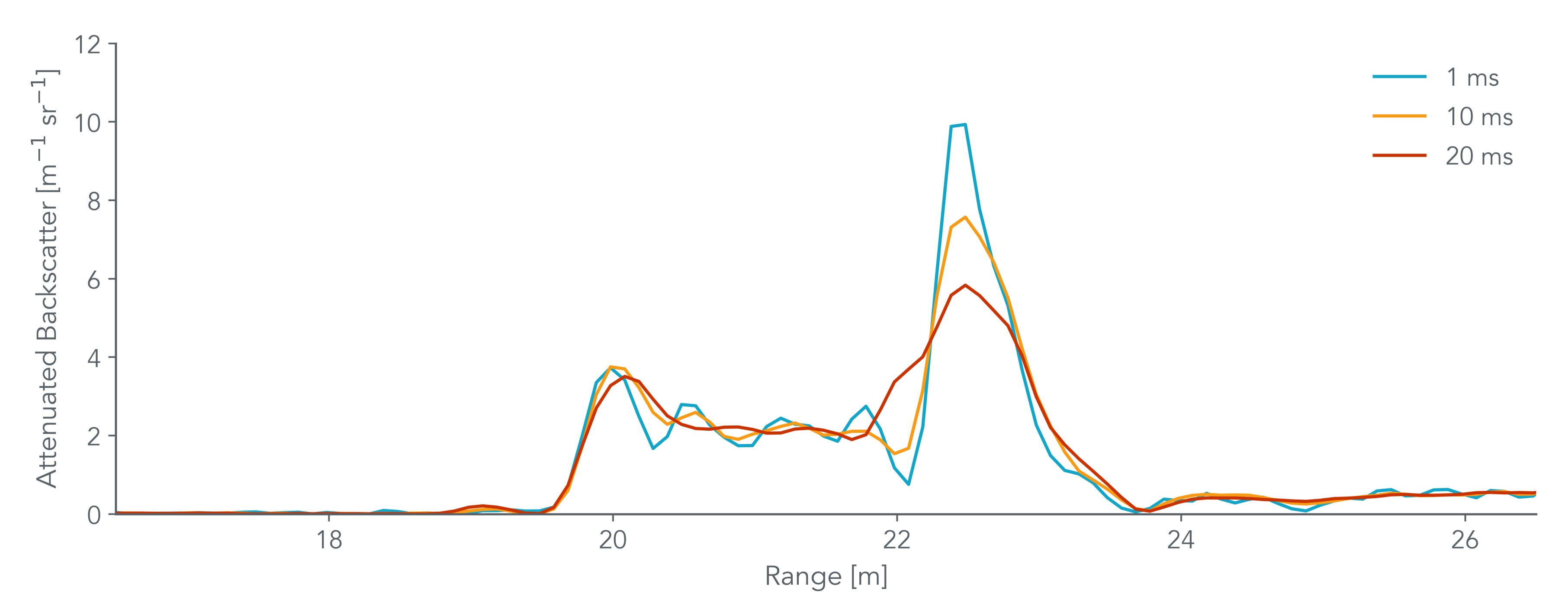
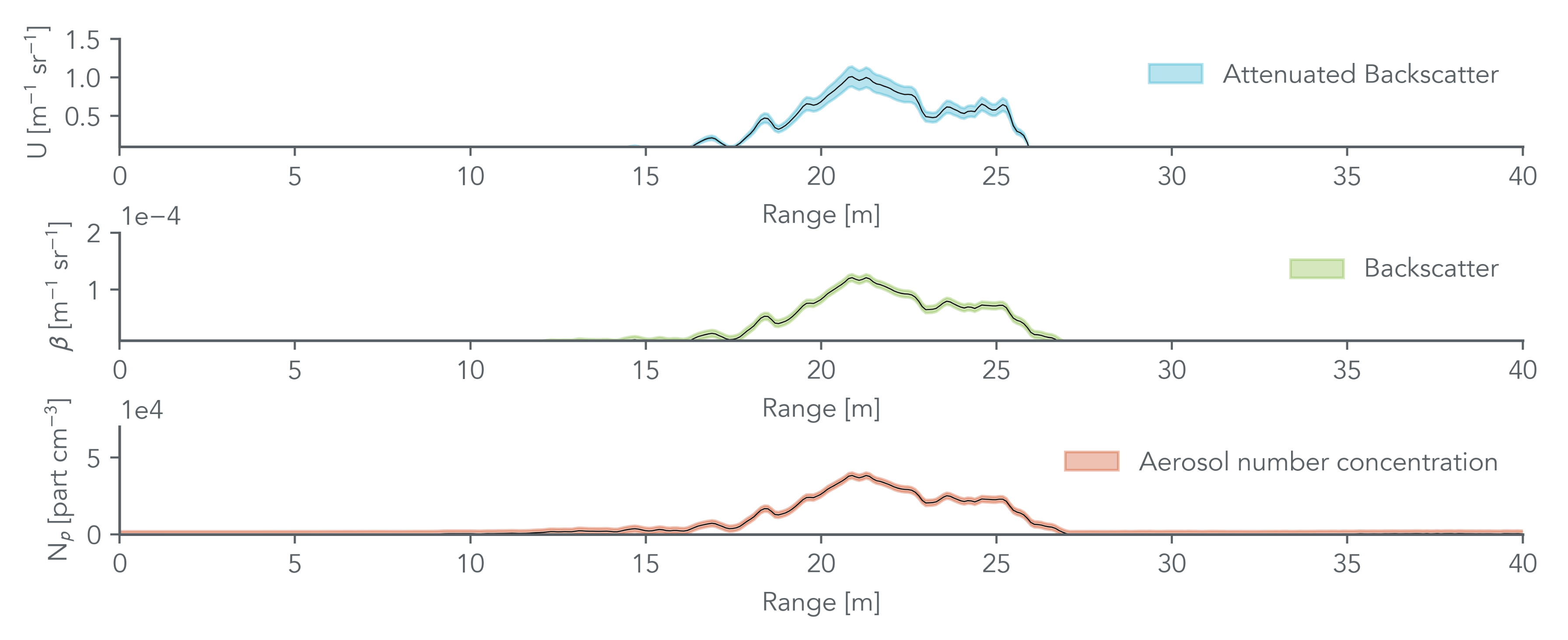
3.3. Attenuated Backscatter Profiles
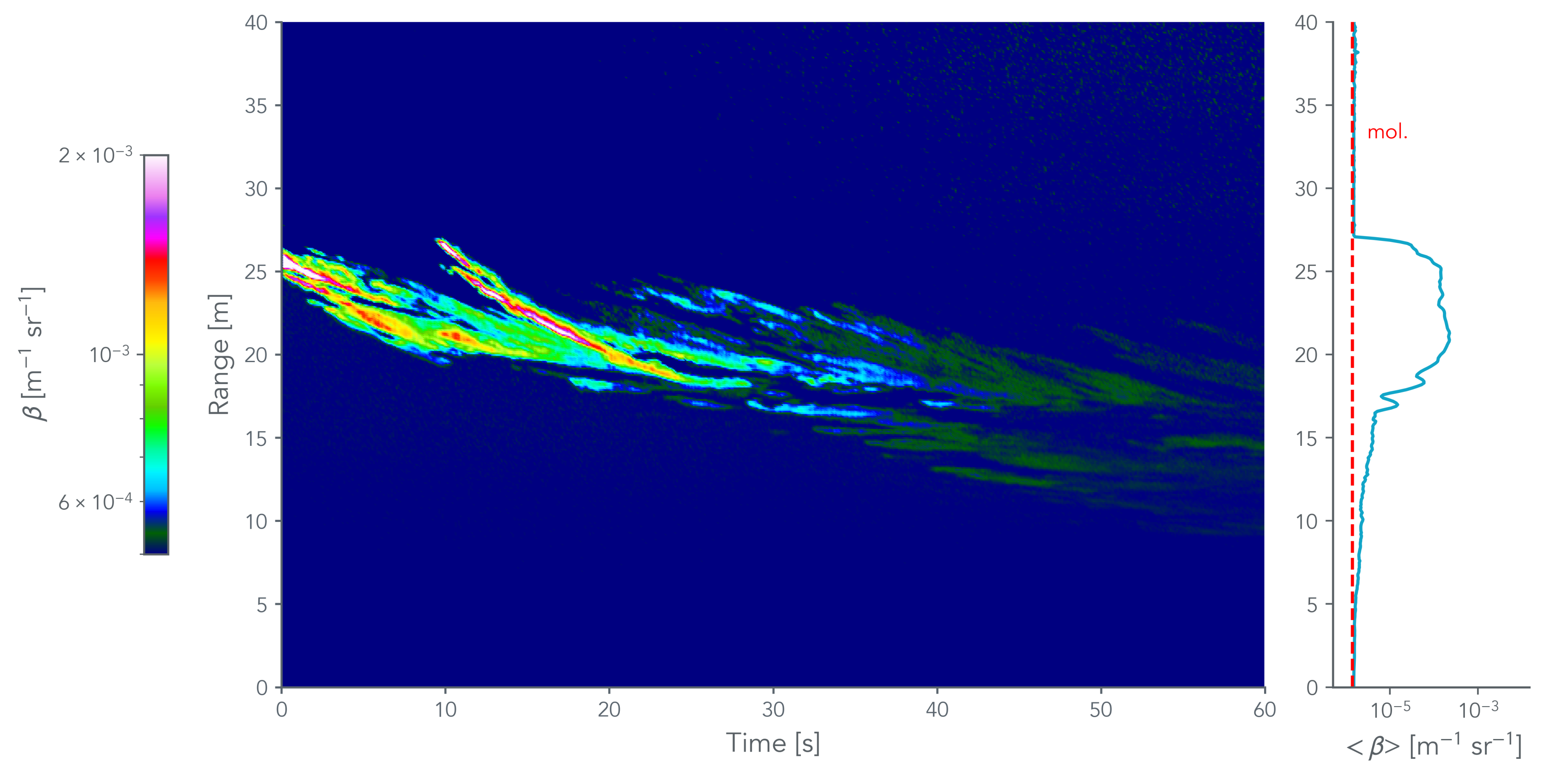
3.4. Aerosol Backscatter Profiles
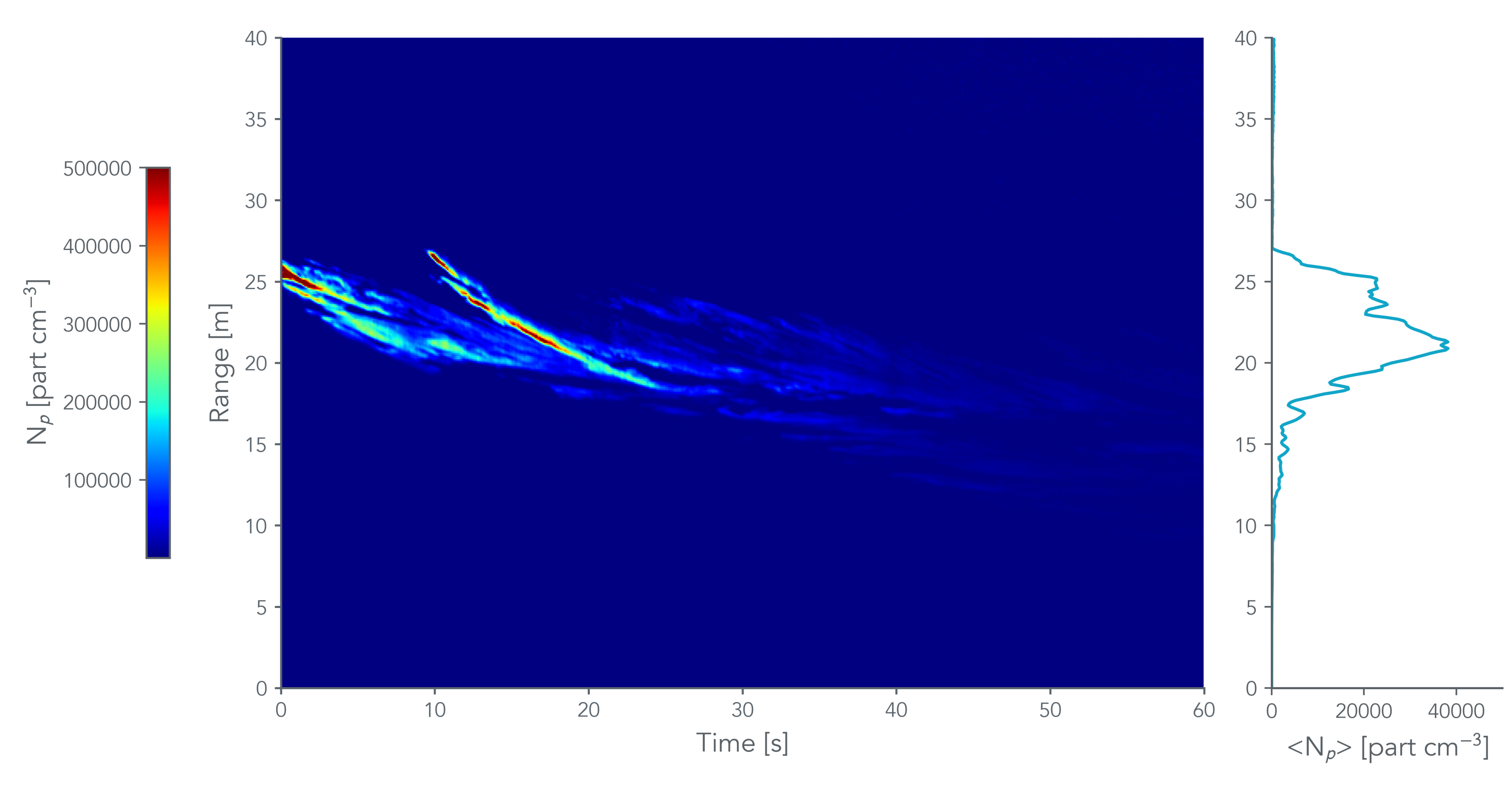
3.5. Number Concentration
4. Discussion
4.1. Range and Temporal Resolution Analysis
4.2. Uncertainty Analysis and Error Propagation
4.3. Comparative Analysis with Local Sensors
5. Conclusions
- (i)
- Short-range elastic backscatter lidar measurements were proved to measure backscattering from aerosol plumes in the short-range (within the first tens of meters) with a high range-resolution (<10 cm) and a high-temporal-resolution (1 ms);
- (ii)
- The inversion of micro-lidar signals was made possible using a forward inverse method without boundary conditions;
- (iii)
- Aerosol backscatter and number concentration profiles could be retrieved using lidar-relevant parameters derived from light-scattering models and ancillary in-situ instruments.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analog-to-digital converter |
| APD | Avalanche Photo-Diode |
| BC | Background noise current |
| BRDF | Bidirection Reflectance Distribution Function |
| DC | Dark noise current |
| DHR | Directional-Hemispherical Reflectance |
| DSP | Digital Signal Processing |
| LIDAR | LIght Detection and Ranging |
| LR | Lidar ratio |
| NBF | Neutral band filter |
| Nd:YAG | Neodymium-doped Yttrium Aluminum Garnet |
| ONERA | Office National d’Etudes et de Recherches Aérospatiales |
| PTFE | Polytetrafluoroethylene |
| RCS | Range-Corrected-Signal |
References
- Liu, Z.; Omar, A.; Vaughan, M.; Hair, J.; Kittaka, C.; Hu, Y.; Powell, K.; Trepte, C.; Winker, D.; Hostetler, C.; et al. CALIPSO lidar observations of the optical properties of Saharan dust: A case study of long-range transport. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Sicard, M.; Molero, F.; Guerrero-Rascado, J.L.; Pedros, R.; Exposito, F.J.; Cordoba-Jabonero, C.; Bolarin, J.M.; Comeron, A.; Rocadenbosch, F.; Pujadas, M.; et al. Aerosol Lidar Intercomparison in the Framework of SPALINET—The Spanish Lidar Network: Methodology and Results. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3547–3559. [Google Scholar] [CrossRef]
- Burton, S.P.; Ferrare, R.A.; Hostetler, C.A.; Hair, J.W.; Rogers, R.R.; Obland, M.D.; Butler, C.F.; Cook, A.L.; Harper, D.B.; Froyd, K.D. Aerosol classification using airborne High Spectral Resolution Lidar measurements—Methodology and examples. Atmos. Meas. Tech. 2012, 5, 73–98. [Google Scholar] [CrossRef]
- Pappalardo, G.; Amodeo, A.; Pandolfi, M.; Wandinger, U.; Ansmann, A.; Bösenberg, J.; Matthias, V.; Amiridis, V.; Tomasi, F.D.; Frioud, M.; et al. Aerosol lidar intercomparison in the framework of the EARLINET project. 3. Ramanlidar algorithm for aerosol extinction, backscatter, and lidar ratio. Appl. Opt. 2004, 43, 5370–5385. [Google Scholar] [CrossRef]
- Brown, A.J.; Videen, G.; Zubko, E.; Heavens, N.; Schlegel, N.J.; Beccera, P.; Meyer, C.; Harrison, T.; Hayne, P.; Obbard, R.; et al. The case for a multi-channel polarization sensitive LIDAR for investigation of insolation-driven ices and atmospheres Planetary Science Decadal Survey White Paper. Earth Space Sci. Open Arch. 2020. [Google Scholar] [CrossRef]
- Welton, E.J.; Campbell, J.R. Micropulse Lidar Signals: Uncertainty Analysis. J. Atmos. Ocean. Technol. 2002, 19, 2089–2094. [Google Scholar] [CrossRef]
- Gong, W.; Li, J.; Mao, F.; Zhang, J. Comparison of simultaneous signals obtained from a dual-field-of-view lidar and its application to noise reduction based on empirical mode decomposition. Chin. Opt. Lett. 2011, 9, 050101. [Google Scholar] [CrossRef]
- Ong, P.M.; Lagrosas, N.; Shiina, T.; Kuze, H. Surface Aerosol Properties Studied Using a Near-Horizontal Lidar. Atmosphere 2019, 11, 36. [Google Scholar] [CrossRef]
- Edner, H.; Ragnarson, P.; Wallinder, E. Industrial Emission Control Using Lidar Techniques. Environ. Sci. Technol. 1995, 29, 330–337. [Google Scholar] [CrossRef]
- Guerrero-Rascado, J.L.; da Costa, R.F.; Bedoya, A.E.; Guardani, R.; Alados-Arboledas, L.; Álvaro, E.B.; Landulfo, E. Multispectral elastic scanning lidar for industrial flare research: Characterizing the electronic subsystem and application. Opt. Express 2014, 22, 31063–31077. [Google Scholar] [CrossRef]
- Del Guasta, M. Daily cycles in urban aerosols observed in Florence (Italy) by means of an automatic 532–1064nm LIDAR. Atmos. Environ. 2002, 36, 2853–2865. [Google Scholar] [CrossRef]
- Schröter, M.; Obermeier, A.; Brüggemann, D.; Plechschmidt, M.; Klemm, O. Remote Monitoring of Air Pollutant Emissions from Point Sources by a Mobile Lidar/Sodar System. J. Air Waste Manag. Assoc. 2003, 53, 716–723. [Google Scholar] [CrossRef] [PubMed][Green Version]
- De Arruda Moreira, G.; Guerrero-Rascado, J.L.; Benavent-Oltra, J.A.; Ortiz-Amezcua, P.; Román, R.; Bedoya-Velásquez, A.E.; Bravo-Aranda, J.A.; Olmo Reyes, F.J.; Landulfo, E.; Alados-Arboledas, L. Analyzing the turbulent planetary boundary layer by remote sensing systems: The Doppler wind lidar, aerosol elastic lidar and microwave radiometer. Atmos. Chem. Phys. 2019, 19, 1263–1280. [Google Scholar] [CrossRef]
- Evgenieva, T.T.; Kolev, N.I.; Iliev, I.T.; Savov, P.B.; Kaprielov, B.K.; Devara, P.C.S.; Kolev, I.N. Lidar and spectroradiometer measurements of atmospheric aerosol optical characteristics over an urban area in Sofia, Bulgaria. Int. J. Remote Sens. 2009, 30, 6381–6401. [Google Scholar] [CrossRef]
- Giles, J.W.; Bankman, I.N.; Sova, R.M.; Morgan, T.R.; Duncan, D.D.; Millard, J.A.; Green, W.J.; Marcotte, F.J. Lidar system model for use with path obscurants and experimental validation. Appl. Opt. 2008, 47, 4085–4093. [Google Scholar] [CrossRef]
- Tremblay, G.; Cao, X.; Roy, G. The effect of dense aerosol cloud on the 3D information contain of flash Lidar. Proc. SPIE Int. Soc. Opt. Eng. 2010, 7828. [Google Scholar] [CrossRef]
- Brown, D.M.; Thrush, E.; Thomas, M.E. Chamber lidar measurements of biological aerosols. Appl. Opt. 2011, 50, 717–724. [Google Scholar] [CrossRef]
- Brown, D.M.; Brown, A.M.; Willitsford, A.H.; Dinello-Fass, R.; Airola, M.B.; Siegrist, K.M.; Thomas, M.E.; Chang, Y. Lidar measurements of solid rocket propellant fire particle plumes. Appl. Opt. 2016, 55, 4657–4669. [Google Scholar] [CrossRef]
- Kleiman, M.M.; Shiloah, N. Effect of dense atmospheric environment on the performance of laser radar sensors used for collision avoidance. Proc. SPIE 1999, 3707, 624–635. [Google Scholar] [CrossRef]
- Song, W.; Lai, J.; Ghassemlooy, Z.; Gu, Z.; Yan, W.; Wang, C.; Li, Z. The effect of fog on the probability density distribution of the ranging data of imaging laser radar. AIP Adv. 2018, 8, 025022. [Google Scholar] [CrossRef]
- Cao, X.; Church, P.; Matheson, J.; Roy, G. Optimization of obscurant penetration with next generation lidar technology. Proc. SPIE 2019, 11005, 217–228. [Google Scholar]
- Bissonnette, L.R. Lidar and Multiple Scattering. In Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere; Springer New York: New York, NY, USA, 2005; pp. 43–103. [Google Scholar] [CrossRef]
- Mishchenko, M.I.; Travis, L.D.; Lacis, A.A. Scattering, Absorption, and Emission of Light by Small Particles; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Berg, M.J.; Sorensen, C.M.; Chakrabarti, A. Extinction and the optical theorem. Part I. Single particles. J. Opt. Soc. Am. A 2008, 25, 1504–1513. [Google Scholar] [CrossRef] [PubMed]
- Fernald, F.G.; Herman, B.M.; Reagan, J.A. Determination of aerosol height distributions by lidar. J. Appl. Meteorol. 1972, 11, 482–489. [Google Scholar] [CrossRef]
- Klett, J.D. Stable analytical inversion solution for processing lidar returns. Appl. Opt. 1981, 20, 211–220. [Google Scholar] [CrossRef] [PubMed]
- Fernald, F.G. Analysis of atmospheric lidar observations: Some comments. Appl. Opt. 1984, 23, 652–653. [Google Scholar] [CrossRef] [PubMed]
- Anderson, T.; Covert, D.; Wheeler, J.; Harris, J.; Perry, K.; Trost, B.; Jaffe, D.; Ogren, J. Aerosol backscatter fraction and single scattering albedo: Measured values and uncertainties at a coastal station in the Pacific Northwest. J. Geophys. Res. Atmos. 1999, 104, 26793–26807. [Google Scholar] [CrossRef]
- Cattrall, C.; Reagan, J.; Thome, K.; Dubovik, O. Variability of aerosol and spectral lidar and backscatter and extinction ratios of key aerosol types derived from selected Aerosol Robotic Network locations. J. Geophys. Res. Atmos. 2005, 110. [Google Scholar] [CrossRef]
- Müller, D.; Ansmann, A.; Mattis, I.; Tesche, M.; Wandinger, U.; Althausen, D.; Pisani, G. Aerosol-type-dependent lidar ratios observed with Raman lidar. J. Geophys. Res. Atmos. 2007, 112. [Google Scholar] [CrossRef]
- Barnaba, F.; Gobbi, G.P. Modeling the aerosol extinction versus backscatter relationship for lidar applications: Maritime and continental conditions. J. Atmos. Ocean. Technol. 2004, 21, 428–442. [Google Scholar] [CrossRef]
- Paulien, L.; Ceolato, R.; Soucasse, L.; Enguehard, F.; Soufiani, A. Lidar-relevant radiative properties of soot fractal aggregate ensembles. J. Quant. Spectrosc. Radiat. Transf. 2020, 241, 106706. [Google Scholar] [CrossRef]
- Kanngiesser, F.; Kahnert, M. Coating material-dependent differences in modelled lidar-measurable quantities for heavily coated soot particles. Opt. Express 2019, 27, 36368–36387. [Google Scholar] [CrossRef] [PubMed]
- Ceolato, R.; Paulien, L.; Maughan, J.B.; Sorensen, C.M.; Berg, M.J. Radiative properties of soot fractal superaggregates including backscattering and depolarization. J. Quant. Spectrosc. Radiat. Transf. 2020, 247, 106940. [Google Scholar] [CrossRef]
- Zuev, V. Laser Beams in the Atmosphere; Wood, J., Ed.; Consultants Bureau: New York, NY, USA, 1982; Available online: https://www.springer.com/gp/book/9781468488838 (accessed on 23 September 2020).
- Measures, R.M. Laser Remote Sensing: Fundamentals and Applications; Wiley-Interscience: New York, NY, USA, 1984. [Google Scholar]
- Kavaya, M.J.; Menzies, R.T.; Haner, D.A.; Oppenheim, U.P.; Flamant, P.H. Target reflectance measurements for calibration of lidar atmospheric backscatter data. Appl. Opt. 1983, 22, 2619–2628. [Google Scholar] [CrossRef]
- Halldórsson, T.; Langerholc, J. Geometrical form factors for the lidar function. Appl. Opt. 1978, 17. [Google Scholar] [CrossRef] [PubMed]
- Harms, J. Lidar return signals for coaxial and noncoaxial systems with central obstruction. Appl. Opt. 1979, 18, 1559–1566. [Google Scholar] [CrossRef]
- Sasano, Y.; Shimizu, H.; Takeuchi, N.; Okuda, M. Geometrical form factor in the laser radar equation: An experimental determination. Appl. Opt. 1979, 18, 3908–3910. [Google Scholar] [CrossRef]
- Dho, S.W.; Park, Y.J.; Kong, H.J. Experimental determination of a geometric form factor in a lidar equation for an inhomogeneous atmosphere. Appl. Opt. 1997, 36. [Google Scholar] [CrossRef]
- Wandinger, U.; Ansmann, A. Experimental determination of the lidar overlap profile with Raman lidar. Appl. Opt. 2002, 41. [Google Scholar] [CrossRef]
- Guerrero-Rascado, J.L.; Costa, M.J.; Bortoli, D.; Silva, A.M.; Lyamani, H.; Alados-Arboledas, L. Infrared lidar overlap function: An experimental determination. Opt Express 2010, 18, 20350–20359. [Google Scholar] [CrossRef]
- Vande Hey, J.; Coupland, J.; Foo, M.H.; Richards, J.; Sandford, A. Determination of overlap in lidar systems. Appl. Opt. 2011, 50, 5791–5797. [Google Scholar] [CrossRef]
- Biavati, G.; Di Donfrancesco, G.; Cairo, F.; Feist, D.G. Correction scheme for close-range lidar returns. Appl. Opt. 2011, 50, 5872–5882. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Li, C.; Zhao, Y.; Li, J.; Chu, Y. Geometrical constraint experimental determination of Raman lidar overlap profile. Appl. Opt. 2016, 55, 4924–4928. [Google Scholar] [CrossRef] [PubMed]
- Stelmaszczyk, K.; Dell’Aglio, M.; Chudzyński, S.; Stacewicz, T.; Wöste, L. Analytical function for lidar geometrical compression form-factor calculations. Appl. Opt. 2005, 44, 1323–1331. [Google Scholar] [CrossRef] [PubMed]
- Ceolato, R.; Riviere, N.; Hespel, L. Reflectances from a supercontinuum laser-based instrument: Hyperspectral, polarimetric and angular measurements. Opt. Express 2012, 20, 29413–29425. [Google Scholar] [CrossRef] [PubMed]
- Wagner, W.; Ullrich, A.; Ducic, V.; Melzer, T.; Studnicka, N. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitising airborne laser scanner. ISPRS J. Photogramm. Remote Sens. 2006, 60, 100–112. [Google Scholar] [CrossRef]
- Chauve, A.; Vega, C.; Durrieu, S.; Bretar, F.; Allouis, T.; Deseilligny, M.P.; Puech, W. Advanced full-waveform lidar data echo detection: Assessing quality of derived terrain and tree height models in an alpine coniferous forest. Int. J. Remote Sens. 2009, 30, 5211–5228. [Google Scholar] [CrossRef]
- Shen, X.; Li, Q.Q.; Wu, G.; Zhu, J. Decomposition of LiDAR waveforms by B-spline-based modeling. ISPRS J. Photogramm. Remote Sens. 2017, 128, 182–191. [Google Scholar] [CrossRef]
- Palmer, W. Exposure Standard for Fog Oil; Technical Report; U.S. Army Biomedical Research and Development Laboratory: Fort Detrick, MD, USA, 1990; Volume 9010. Available online: https://www.osti.gov/biblio/5668868-exposure-standard-fog-oil-technical-report-dec-nov (accessed on 23 September 2020).
- Wieslander, G.; Norbäck, D.; Lindgren, T. Experimental exposure to propylene glycol mist in aviation emergency training: Acute ocular and respiratory effects. Occup. Environ. Med. 2001, 58, 649–655. [Google Scholar] [CrossRef]
- Mie, G. Beiträge zur Optik trüber Medien, speziell kolloidaler Metallösungen. Annalen der Physik 1908, 330, 377–445. [Google Scholar] [CrossRef]
- Yue, G.K.; Deepak, A. Modeling of coagulation-sedimentation effects on transmission of visible/IR laser beams in aerosol media. Appl. Opt. 1979, 18, 3918–3925. [Google Scholar] [CrossRef]
- Farmer, W.M.; Morris, R.D.; Schwartz, F.A. Optical particle size measurements of hygroscopic smokes inlaboratory and field environments. Appl. Opt. 1981, 20, 3929–3940. [Google Scholar] [CrossRef] [PubMed]
- Pan, X.; Kanaya, Y.; Taketani, F.; Miyakawa, T.; Inomata, S.; Komazaki, Y.; Tanimoto, H.; Wang, Z.; Uno, I.; Wang, Z. Emission characteristics of refractory black carbon aerosols from fresh biomass burning: Aperspective from laboratory experiments. Atmos. Chem. Phys. 2017, 17, 13001–13016. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laser | Wavelength | 532 nm |
| Pulse duration | <800 ps | |
| Pulse repetition rate | 1.0 kHz | |
| Pulse energy | 20 J | |
| Beam divergence | 0.5 mrad | |
| Beam diameter | 1 mm | |
| Bi-static angle | 1–5 mrad | |
| Receiver | Type | Cassegrain |
| Effective diameter | 90 mm | |
| Focal length | 500 mm | |
| F-number | 6.3 | |
| Sensor | Type | Si-APD |
| Bandwidth | 1.0 GHz | |
| Responsivity | 15 A/W | |
| Active area | 0.2 mm | |
| Digital Signal Processing | Bandwidth | >1.5 GHz |
| Resolution | 12 bits | |
| System control | Embedded computer |
| Microphysical and Optical Properties | |||
|---|---|---|---|
| Value | Units | ||
| Type of aerosol | fog-oil | ||
| Aerosol size distribution | log-normal | ||
| Modal radius | 0.18 ± 0.01 | m | |
| Geometric standard deviation | 1.15 | ||
| Complex refractive index | m | ||
| Averaged Lidar-Relevant Properties | |||
| Differential backscattering cross-section | 3.16 × 10 | m sr | |
| Lidar extinction-to-backscatter ratio | 73.1 | sr | |
| Averaged Aerosol Number Concentration | ||
|---|---|---|
| Instrument | Value | Units |
| Colibri | 3990 ± 130 | part cm |
| Fidas 200 | 4055 ± 400 | part cm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ceolato, R.; Bedoya-Velásquez, A.E.; Mouysset, V. Short-Range Elastic Backscatter Micro-Lidar for Quantitative Aerosol Profiling with High Range and Temporal Resolution. Remote Sens. 2020, 12, 3286. https://doi.org/10.3390/rs12203286
Ceolato R, Bedoya-Velásquez AE, Mouysset V. Short-Range Elastic Backscatter Micro-Lidar for Quantitative Aerosol Profiling with High Range and Temporal Resolution. Remote Sensing. 2020; 12(20):3286. https://doi.org/10.3390/rs12203286
Chicago/Turabian StyleCeolato, Romain, Andres E. Bedoya-Velásquez, and Vincent Mouysset. 2020. "Short-Range Elastic Backscatter Micro-Lidar for Quantitative Aerosol Profiling with High Range and Temporal Resolution" Remote Sensing 12, no. 20: 3286. https://doi.org/10.3390/rs12203286
APA StyleCeolato, R., Bedoya-Velásquez, A. E., & Mouysset, V. (2020). Short-Range Elastic Backscatter Micro-Lidar for Quantitative Aerosol Profiling with High Range and Temporal Resolution. Remote Sensing, 12(20), 3286. https://doi.org/10.3390/rs12203286