Breaking Wave Height Estimation from Timex Images: Two Methods for Coastal Video Monitoring Systems



Abstract

1. Introduction
2. Methods
2.1. Case Study
2.1.1. Site and Video Data
2.1.2. Hydrodynamics
2.2. Pixel Intensity Versus Breakpoints
- -
- as the first breaking point (farthest from the shore);
- -
- as the significant wave breaking height position, averaging the 33% of the farthest-from-shoreline breakpoints;
- -
- as the mean position among all breaking positions; and
- -
- as the location where 100% of the waves have broken, i.e., the closest breakpoint to the shore.
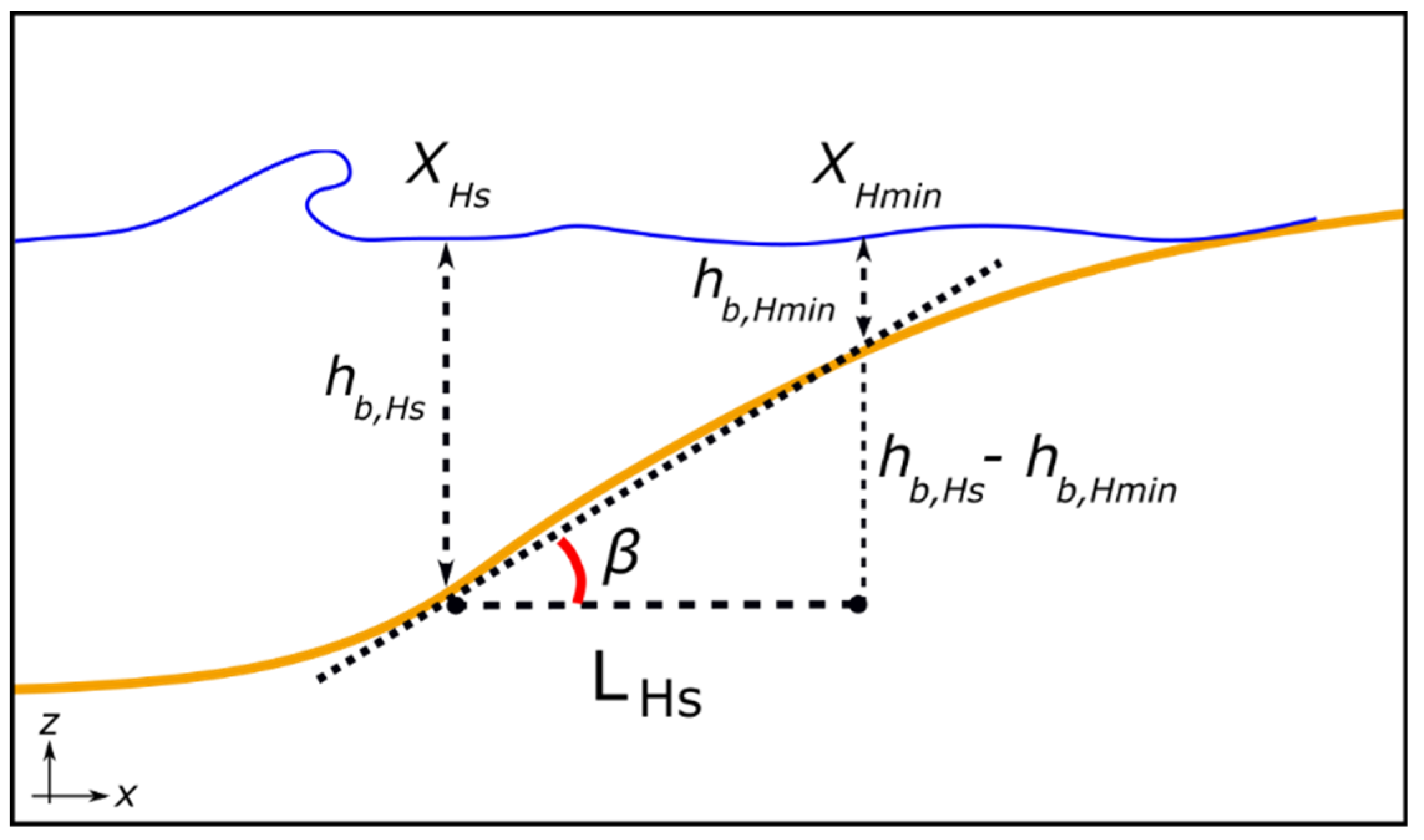
2.3. Method 1:
2.4. Automated Extraction of LHs from Timestack and Timex
- The peak of the Gaussian-like shape (point M) is found using a peak finder algorithm, searching for the global maximum of the Min-Max normalized .
- Starting from point M and moving “seaward” on , the point S is identified as the first point of the derivative of Min-Max normalized exceeding a threshold value of 0.002, as the first derivative represents the slope of at each point.
- (i)
- The breaking line is found on the whole Timex (Figure 5a,b), sampling pixel intensity of a series of parallel transect and searching the global maximum of the Min-Max normalized .
- (ii)
- A point is chosen along the breakline to compute the breaking height.
- (iii)
- A portion of the previously detected breaking line, which has the chosen point as median point, is selected. A 10-m length was considered an adequate extent to be representative of breakline portion.
- (iv)
- The line passing through the point, and perpendicular to the 10 m portion of breaking line is chosen as transect to sample and therefore to find with Steps I and II.
2.5. LHs Versus Hydrodynamic Parameters
2.6. Method 2:
2.7. Application at Additional Study Sites
3. Results
3.1. Automated Algorithm and Numerical Model
3.2. Wave Breaking Height Assessment
3.3. Application at Additional Study Sites
4. Discussion
4.1. Video-Based Methods
4.2. Breaker Index
4.3. Method 1:
4.4. Method 2:
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bird, E.C.F. Coastal Geomorphology: An Introduction; John Wiley & Sons: Chichester, UK, 2014. [Google Scholar]
- Meer, J.W.V.D.; Stam, C.J.M. Wave Runup on Smooth and Rock Slopes of Coastal Structures. J. Waterway Port Coast. Ocean Eng. 1992, 118, 534–550. [Google Scholar] [CrossRef]
- Ferreira, Ó.; Ciavola, P.; Armaroli, C.; Balouin, Y.; Benavente, J.; Del Río, L.; Deserti, M.; Esteves, L.S.; Furmanczyk, K.; Haerens, P.; et al. Coastal storm risk assessment in Europe: Examples from 9 study sites. J. Coast. Res. 2009, SI56, 1632–1636. [Google Scholar]
- Svendsen, I.A. Introduction to Nearshore Hydrodynamics; World Scientific: Hackensack, NJ, USA, 2006. [Google Scholar]
- Battjes, J.A. Surf Similarity. In Proceedings of the 14th Asce Coastal Engineering Conference, Copenhagen, Denmark, 24–28 June 1974; Volume 1, pp. 466–480. [Google Scholar]
- Battjes, J.A. Surf-Zone Dynamics. Annu. Rev. Fluid Mech. 1988, 20, 257–291. [Google Scholar] [CrossRef]
- Booij, N.; Ris, R.C.; Holthuijsen, L.H. A third-generation wave model for coastal regions 1. Model description and validation. J. Geophys. Res. Ocean. 1999, 104, 7649–7666. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G.; Smit, P. SWASH: An operational public domain code for simulating wave fields and rapidly varied flows in coastal waters. Coast. Eng. 2011, 58, 992–1012. [Google Scholar] [CrossRef]
- Camenen, B.; Larson, M. Predictive Formulas for Breaker Depth Index and Breaker Type. J. Coast. Res. 2007, 234, 1028–1041. [Google Scholar] [CrossRef]
- Robertson, B.; Hall, K.; Zytner, R.; Nistor, I. Breaking Waves: Review of Characteristic Relationships. Coast. Eng. J. 2013, 55, 1350002. [Google Scholar] [CrossRef]
- Browne, M.; Castelle, B.; Strauss, D.; Tomlinson, R.; Blumenstein, M.; Lane, C. Near-shore swell estimation from a global wind-wave model: Spectral process, linear, and artificial neural network models. Coast. Eng. 2007, 54, 445–460. [Google Scholar] [CrossRef]
- Sutherland, P.; Melville, W.K. Field measurements and scaling of ocean surface wave-breaking statistics. Geophys. Res. Lett. 2013, 40, 3074–3079. [Google Scholar] [CrossRef]
- Martins, K.; Blenkinsopp, C.E.; Almar, R.; Zang, J. The influence of swash-based reflection on surf zone hydrodynamics: a wave-by-wave approach. Coast. Eng. 2017, 122, 27–43. [Google Scholar] [CrossRef]
- Andriolo, U.; Sánchez-García, E.; Taborda, R. Operational use of surfcam online streaming images for coastal morphodynamic studies. Remote Sens. 2019, 11, 78. [Google Scholar] [CrossRef]
- Harley, M.D.; Andriolo, U.; Armaroli, C.; Ciavola, P. Shoreline rotation and response to nourishment of a gravel embayed beach using a low-cost video monitoring technique: San Michele-Sassi Neri, Central Italy. J. Coast. Conserv. 2014, 18, 551–565. [Google Scholar] [CrossRef]
- Holman, R.A.; Stanley, J. The history and technical capabilities of Argus. Coast. Eng. 2007, 54, 477–491. [Google Scholar] [CrossRef]
- Almar, R.; Cienfuegos, R.; Catalán, P.A.; Michallet, H.; Castelle, B.; Bonneton, P.; Marieu, V. A new breaking wave height direct estimator from video imagery. Coast. Eng. 2012, 61, 42–48. [Google Scholar] [CrossRef]
- Gal, Y.; Browne, M.; Lane, C. Automatic estimation of nearshore wave height from video timestacks. In Proceedings of the 2011 International Conference on Digital Image Computing: Techniques and Applications (DICTA 2011), Noosa, Australia, 6–8 December 2011; pp. 364–369. [Google Scholar]
- Andriolo, U. Nearshore Wave Transformation Domains from Video Imagery. J. Mar. Sci. Eng. 2019, 7, 186. [Google Scholar] [CrossRef]
- Shand, T.; Bailey, D.; Shand, R. Automated Detection of Breaking Wave Height Using an Optical Technique. J. Coast. Res. 2012, 28, 671–682. [Google Scholar]
- Huntley, D.; Saulter, A.; Kingston, K.; Holman, R. Use of video imagery to test model predictions of surf heights. WIT Trans. Ecol. Environ. 2009, 126, 39–50. [Google Scholar]
- Armaroli, C.; Ciavola, P. Dynamics of a nearshore bar system in the northern Adriatic: A video-based morphological classification. Geomorphology 2011, 126, 201–216. [Google Scholar] [CrossRef]
- Turner, I.L.; Whyte, D.; Ruessink, B.G.; Ranasinghe, R. Observations of rip spacing, persistence and mobility at a long, straight coastline. Mar. Geol. 2007, 236, 209–221. [Google Scholar] [CrossRef]
- Antunes, C.; Taborda, R. Sea level at cascais tide gauge: Data, analysis and results. J. Coast. Res. 2009, 56, 218–222. [Google Scholar]
- Taborda, R.; Silva, A. COSMOS: A lightweight coastal video monitoring system. Comput. Geosci. 2012, 49, 248–255. [Google Scholar] [CrossRef]
- Holthuijsen, L.H. Waves in Oceanic and Coastal Waters; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar]
- Battjes, J.A.; Janssen, J.P.F.M. Energy Loss and Set-Up Due To Breaking of Random Waves. In Proceedings of the 16th International Conference on Coastal Engineering, Hamburg, Germany, 27 August–3 September 1978; Volume 1, pp. 569–587. [Google Scholar]
- Lippmann, T.C.; Holman, R.A. Quantification of sand bar morphology: a video technique based on wave dissipation. J. Geophys. Res. 1989, 94, 995–1011. [Google Scholar] [CrossRef]
- Catálan, P.A.; Haller, M.C. Remote sensing of breaking wave phase speeds with application to non-linear depth inversions. Coast. Eng. 2008, 55, 93–111. [Google Scholar] [CrossRef]
- Haller, M.C.; Catalán, P.A. Remote sensing of wave roller lengths in the laboratory. J. Geophys. Res. Ocean. 2009, 114. [Google Scholar] [CrossRef]
- Kamphuis, J.W. Introduction to Coastal Engineering and Management; World Scientific: Hackensack, NJ, USA, 2012. [Google Scholar]
- McCowan, J. On the highest wave of permanent type. Philos. Mag. J. Sci. 1894, 5, 351–358. [Google Scholar] [CrossRef]
- Robertson, B.; Nistor, I.; Hall, K.; Buckham, B. Remote measurement and prediction of breaking wave parameters. Coast. Eng. Proc. 2014, 1, 41. [Google Scholar] [CrossRef]
- Salmon, J.E.; Holthuijsen, L.H.; Zijlema, M.; van Vledder, G.P.; Pietrzak, J.D. Scaling depth-induced wave-breaking in two-dimensional spectral wave models. Ocean Model. 2015, 87, 30–47. [Google Scholar] [CrossRef]
- Goda, Y. Reanalysis of regular and random breaking wave statistics. Coast. Eng. J. 2010, 52, 71–106. [Google Scholar] [CrossRef]
- Kamphuis, J.W. Incipient wave breaking. Coast. Eng. 1991, 15, 185–203. [Google Scholar] [CrossRef]
- Gaughan, M.K.; Komar, P.D. The theory of wave propagation in water of gradually varying depth and the prediction of breaker type and height. J. Geophys. Res. 1975, 80, 2991–2996. [Google Scholar] [CrossRef]
- Fortunato, A.B.; Oliveira, A.; Rogeiro, J.; Tavares da Costa, R.; Gomes, J.L.; Li, K.; de Jesus, G.; Freire, P.; Rilo, A.; Mendes, A.; et al. Operational forecast framework applied to extreme sea levels at regional and local scales. J. Oper. Oceanogr. 2017, 10, 1–15. [Google Scholar] [CrossRef]
- Sánchez-García, E.; Balaguer-Beser, A.; Pardo-Pascual, J.E. C-Pro: A coastal projector monitoring system using terrestrial photogrammetry with a geometric horizon constraint. ISPRS J. Photogramm. Remote Sens. 2017, 128, 255–273. [Google Scholar] [CrossRef]
- Román-Rivera, M.A.; Ellis, J.T. A synthetic review of remote sensing applications to detect nearshore bars. Mar. Geol. 2019, 408, 144–153. [Google Scholar] [CrossRef]
- Splinter, K.D.; Harley, M.D.; Turner, I.L. Remote sensing is changing our view of the coast: Insights from 40 years of monitoring at Narrabeen-Collaroy, Australias. Remote Sens. 2018, 10, 1744. [Google Scholar] [CrossRef]
- Moura, T.; Baldock, T.E. Remote sensing of the correlation between breakpoint oscillations and infragravity waves in the surf and swash zone. J. Geophys. Res. Ocean. 2017, 122, 3106–3122. [Google Scholar] [CrossRef]
- Robertson, B.; Gharabaghi, B.; Hall, K. Prediction of Incipient Breaking Wave Heights Using Artificial Neural Networks and Empirical Relationships. Coast. Eng. J. 2015, 31, 150901234203000. [Google Scholar] [CrossRef]
- Holman, R.; Plant, N.; Holland, T. CBathy: A robust algorithm for estimating nearshore bathymetry. J. Geophys. Res. Ocean. 2013, 118, 2595–2609. [Google Scholar] [CrossRef]
- Almar, R.; Cienfuegos, R.; Catalán, P.A.; Birrien, F.; Castelle, B.; Michallet, H. Nearshore bathymetric inversion from video using a fully non-linear Boussinesq wave model. J. Coast. Res. 2011, 64, 3–7. [Google Scholar]
- Vousdoukas, M.I.; Ferreira, P.M.; Almeida, L.P.; Dodet, G.; Psaros, F.; Andriolo, U.; Taborda, R.; Silva, A.N.; Ruano, A.; Ferreira, Ó.M. Performance of intertidal topography video monitoring of a meso-tidal reflective beach in South Portugal. Ocean Dyn. 2011, 61, 1521–1540. [Google Scholar] [CrossRef]
- Andriolo, U.; Almeida, L.P.; Almar, R. Coupling terrestrial LiDAR and video imagery to perform 3D intertidal beach topography. Coast. Eng. 2018, 140, 232–239. [Google Scholar] [CrossRef]
- van Dongeren, A.; Plant, N.; Cohen, A.; Roelvink, D.; Haller, M.C.; Catalán, P. Beach Wizard: Nearshore bathymetry estimation through assimilation of model computations and remote observations. Coast. Eng. 2008, 55, 1016–1027. [Google Scholar] [CrossRef]
- Thornton, E.B.; Guza, R.T. Energy saturation and phase speeds measured on the natural beach. J. Geophys. Res. 1982, 87, 9499–9508. [Google Scholar] [CrossRef]
- Martins, K.; Blenkinsopp, C.E.; Zang, J. Monitoring individual wave characteristics in the inner surf with a 2-dimensional laser scanner (LiDAR). J. Sens. 2016, 2016, 7965431. [Google Scholar] [CrossRef]
- Martins, K.; Blenkinsopp, C.E.; Power, H.E.; Bruder, B.; Puleo, J.A.; Bergsma, E.W.J. High-resolution monitoring of wave transformation in the surf zone using a LiDAR scanner array. Coast. Eng. 2017, 128, 37–43. [Google Scholar] [CrossRef]
- Harley, M.D.; Kinsela, M.A.; Sánchez-García, E.; Vos, K. Shoreline change mapping using crowd-sourced smartphone images. Coast. Eng. 2019, 150, 175–189. [Google Scholar] [CrossRef]
- Holman, R.A.; Brodie, K.L.; Spore, N.J. Surf Zone Characterization Using a Small Quadcopter: Technical Issues and Procedures. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2017–2027. [Google Scholar] [CrossRef]
- Gonçalves, G.R.; Pérez, J.A.; Duarte, J. Accuracy and effectiveness of low cost UASs and open source photogrammetric software for foredunes mapping. Int. J. Remote Sens. 2018, 39, 5059–5077. [Google Scholar] [CrossRef]
- Bergsma, E.W.J.; Almar, R.; Melo de Almeida, L.P.; Sall, M. On the operational use of UAVs for video-derived bathymetry. Coast. Eng. 2019, 152, 103527. [Google Scholar] [CrossRef]
- Mole, M.A.; Mortlock, T.R.C.; Turner, I.L.; Goodwin, I.D.; Splinter, K.D.; Short, A.D. Capitalizing on the surfcam phenomenon: a pilot study in regional-scale shoreline and inshore wave monitoring utilizing existing camera infrastructure. J. Coast. Res. 2013, 165, 1433–1438. [Google Scholar] [CrossRef]
- Bracs, M.A.; Turner, I.L.; Splinter, K.D.; Short, A.D.; Lane, C.; Davidson, M.A.; Goodwin, I.D.; Pritchard, T.; Cameron, D. Evaluation of Opportunistic Shoreline Monitoring Capability Utilizing Existing “Surfcam” Infrastructure. J. Coast. Res. 2016, 319, 542–554. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Video Source | Image Resolution | Dataset (No. Timex) | Wave Height Range (m) | Beach Bottom | Breaking Zone | Wave Data Source |
|---|---|---|---|---|---|---|---|
| CN | video station | 2048 × 1536 | 36 | 2.57 ± 3.75 | sandy | outer bar | Offshore Buoy |
| PG | video station | 2048 × 1536 | 49 | 0.46 ± 0.85 | sandy | shore | ADCP |
| TP | surfcam | 800 × 450 | 655 | 1.17 ± 2.76 | sandy | outer bar | model (WIFF) |
| KO | video station | 1920 × 1080 | 70 | 0.08 ± 0.13 | sandy | shore | PT |
| RI | surfcam | 800 × 450 | 92 | 1.04 ± 3.27 | rocky | shore | model (SWASH) |
| 28 March | 29 March | Dataset | ||
|---|---|---|---|---|
| Ho | min ± max | 1.64 ± 1.72 | 2.16 ± 3.53 | 1.64 ± 3.53 |
| Hsb_SWASH | min ± max | 1.04 ± 1.82 | 1.39 ± 3.27 | 1.04 ± 3.27 |
| records | 52 | 42 | 94 | |
| Hsb_v | Bias | 0.02 | −0.12 | −0.04 |
| RMSE | 0.19 | 0.22 | 0.21 | |
| NRMSE | 14% | 12% | 9% | |
| Hsb_v24 | Bias | 0.17 | −0.28 | −0.03 |
| RMSE | 0.55 | 0.43 | 0.5 | |
| NRMSE | 38% | 23% | 22% |
| Site | Video Source | Dataset (No. Timex) | Wave Height Range (m) | Beach Sediment | Breaking Zone | Wave Data Source for Comparison | RMSE (m) | NRMSE (%) |
|---|---|---|---|---|---|---|---|---|
| CN | video station | 36 | 2.57 ± 3.75 | sandy | outer bar | Offshore buoy | 0.3 | 10% |
| PG | video station | 49 | 0.46 ± 0.85 | sandy | shore | ADCP | 0.12 | 18% |
| TP | surfcam | 655 | 1.17 ± 2.76 | sandy | outer bar | model (WIFF) | 0.35 | 21% |
| KO | video station | 70 | 0.08 ± 0.13 | sandy | shore | PT | 0.02 | 20% |
| RI | surfcam | 92 | 1.04 ± 3.27 | rocky | shore | model (SWASH) | 0.5 | 22% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andriolo, U.; Mendes, D.; Taborda, R. Breaking Wave Height Estimation from Timex Images: Two Methods for Coastal Video Monitoring Systems. Remote Sens. 2020, 12, 204. https://doi.org/10.3390/rs12020204
Andriolo U, Mendes D, Taborda R. Breaking Wave Height Estimation from Timex Images: Two Methods for Coastal Video Monitoring Systems. Remote Sensing. 2020; 12(2):204. https://doi.org/10.3390/rs12020204
Chicago/Turabian StyleAndriolo, Umberto, Diogo Mendes, and Rui Taborda. 2020. "Breaking Wave Height Estimation from Timex Images: Two Methods for Coastal Video Monitoring Systems" Remote Sensing 12, no. 2: 204. https://doi.org/10.3390/rs12020204
APA StyleAndriolo, U., Mendes, D., & Taborda, R. (2020). Breaking Wave Height Estimation from Timex Images: Two Methods for Coastal Video Monitoring Systems. Remote Sensing, 12(2), 204. https://doi.org/10.3390/rs12020204