Global Evaluation of the Suitability of MODIS-Terra Detected Cloud Cover as a Proxy for Landsat 7 Cloud Conditions


Abstract

1. Introduction
2. Data
2.1. Landsat Cloud Data
2.2. MODIS Cloud Mask and Geolocation Product
2.3. Spatial and Temporal Extent of the Analysis
3. Methods
3.1. Computation of MODIS Cloud Fractions for Each Landsat Image
3.2. MODIS and Landsat Cloud Fraction Comparison Methodology
4. Results
4.1. Landsat 7 ETM+ Image Availability and Global Cloud Histograms
4.2. MODIS and Landsat Cloud Fraction Differences
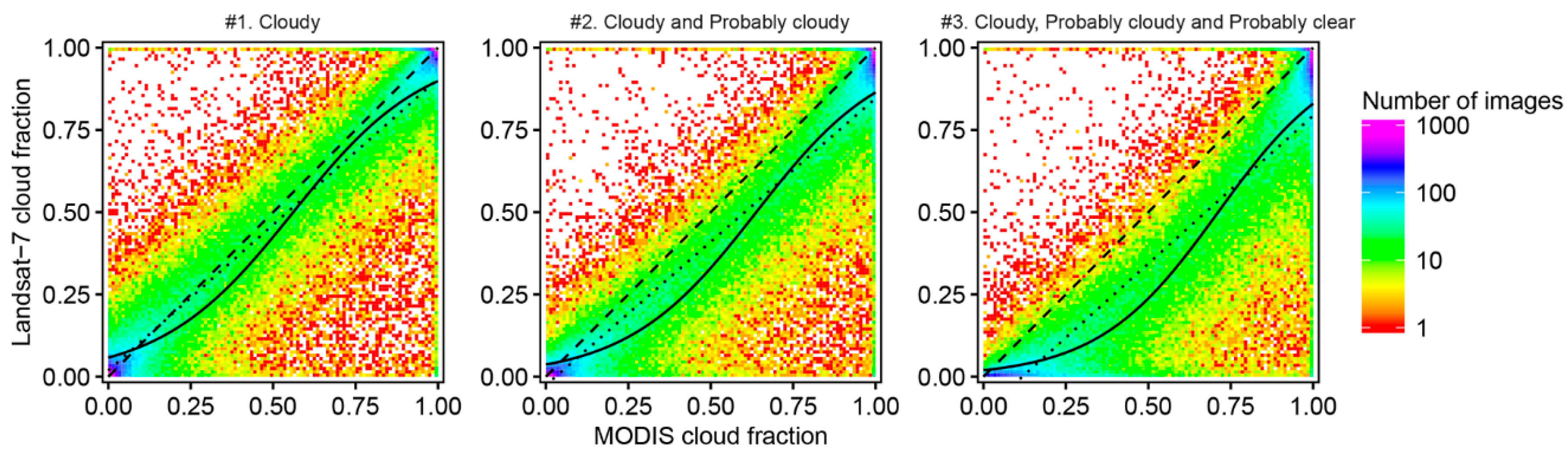
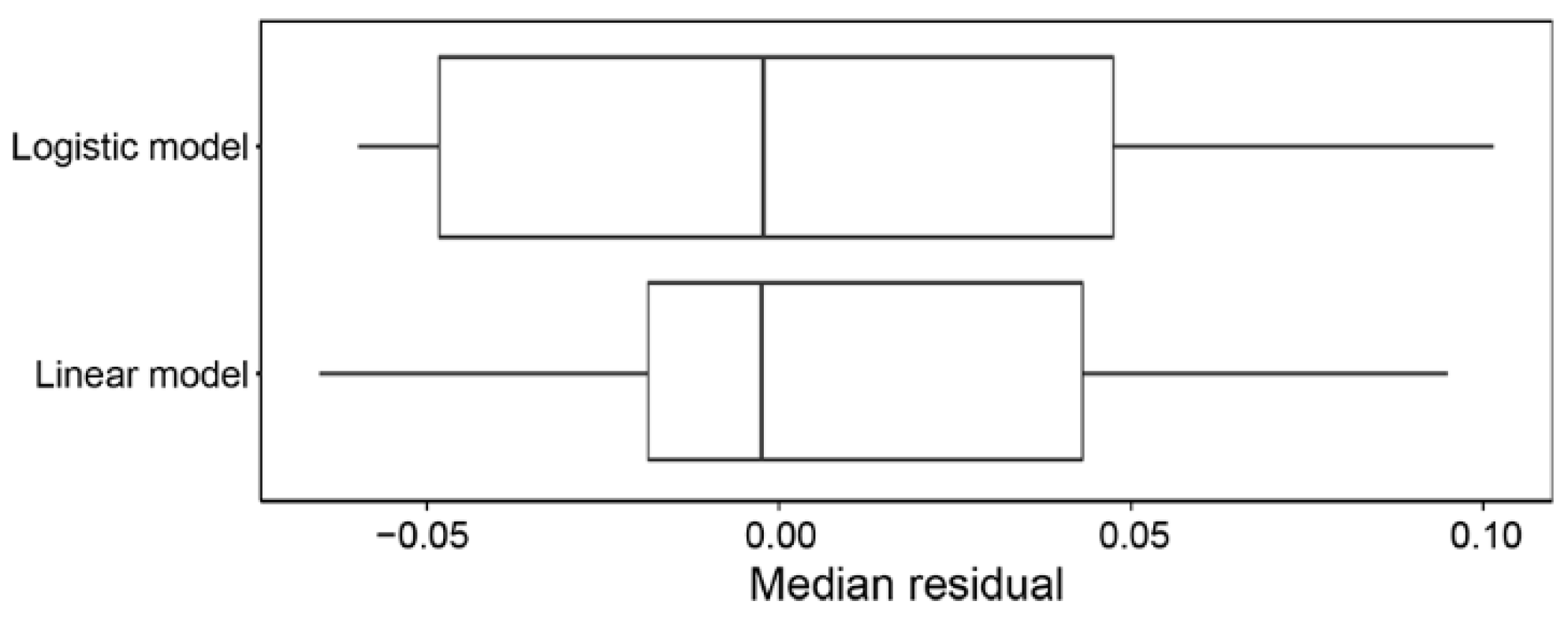
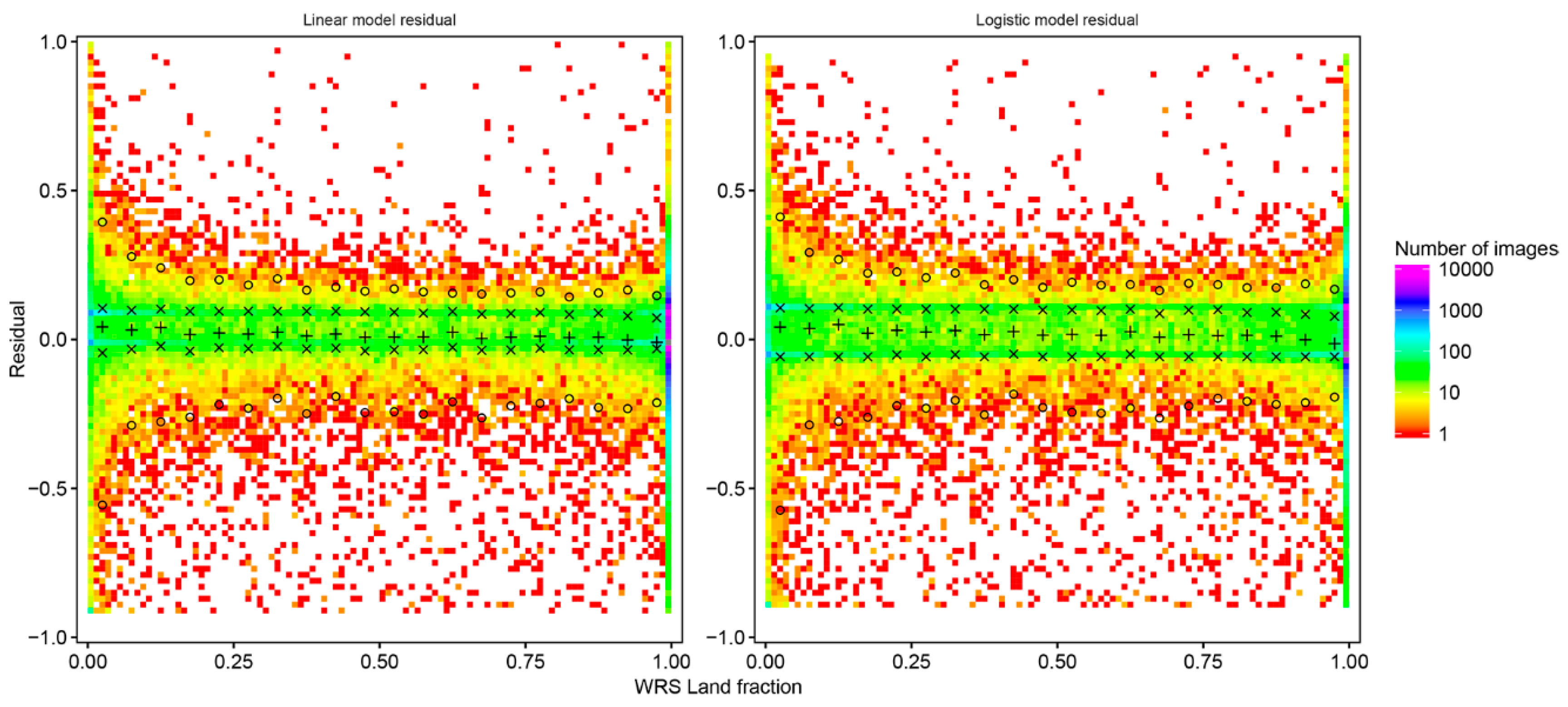
4.3. Regression Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Roy, D.P.; Wulder, M.A.; Loveland, T.R.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Helder, D.; Irons, J.R.; Johnson, D.M.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Wulder, M.A.; Loveland, T.R.; Roy, D.P.; Crawford, C.J.; Masek, J.G.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Belward, A.S.; Cohen, W.B.; et al. Current status of Landsat program, science, and applications. Remote Sens. Environ. 2019, 225, 127–147. [Google Scholar] [CrossRef]
- Li, J.; Roy, D. A global analysis of Sentinel-2a, Sentinel-2b and Landsat-8 data revisit intervals and implications for terrestrial monitoring. Remote Sens. 2017, 9, 902. [Google Scholar]
- Boschetti, L.; Roy, D.P.; Justice, C.O.; Humber, M.L. MODIS–Landsat fusion for large area 30 m burned area mapping. Remote Sens. Environ. 2015, 161, 27–42. [Google Scholar] [CrossRef]
- Melchiorre, A.; Boschetti, L. Global analysis of burned area persistence time with MODIS data. Remote Sens. 2018, 10, 750. [Google Scholar] [CrossRef]
- Roy, D.P.; Huang, H.; Boschetti, L.; Giglio, L.; Yan, L.; Zhang, H.H.; Li, Z. Landsat-8 and Sentinel-2 burned area mapping—A combined sensor multi-temporal change detection approach. Remote Sens. Environ. 2019, 231, 111254. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418. [Google Scholar] [CrossRef] [PubMed]
- Roy, D.P.; Yan, L. Robust landsat-based crop time series modelling. Remote Sens. Environ. 2018. [Google Scholar] [CrossRef]
- Ackerman, S.; Strabala, K.; Menzel, P.; Frey, R.; Moeller, C.; Gumley, L. Discriminating Clear-Sky from Cloud with MODIS Algorithm Theoretical Basis Document (MOD35) Version 6.1; Cooperative Institute for Meteorological Satellite Studies, University of Wisconsin—Madison: Madison, WI, USA, 2010. [Google Scholar]
- Whitcraft, A.; Becker-Reshef, I.; Killough, B.; Justice, C. Meeting earth observation requirements for global agricultural monitoring: An evaluation of the revisit capabilities of current and planned moderate resolution optical earth observing missions. Remote Sens. 2015, 7, 1482–1503. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Loveland, T.R.; Woodcock, C.E.; Belward, A.S.; Cohen, W.B.; Fosnight, E.A.; Shaw, J.; Masek, J.G.; Roy, D.P. The global Landsat archive: Status, consolidation, and direction. Remote Sens. Environ. 2016, 185, 271–283. [Google Scholar] [CrossRef]
- Mercury, M.; Green, R.; Hook, S.; Oaida, B.; Wu, W.; Gunderson, A.; Chodas, M. Global cloud cover for assessment of optical satellite observation opportunities: A HyspIRI case study. Remote Sens. Environ. 2012, 126, 62–71. [Google Scholar] [CrossRef]
- Whitcraft, A.K.; Vermote, E.F.; Becker-Reshef, I.; Justice, C.O. Cloud cover throughout the agricultural growing season: Impacts on passive optical earth observations. Remote Sens. Environ. 2015, 156, 438–447. [Google Scholar] [CrossRef]
- Goward, S.N.; Loboda, T.V.; Williams, D.L.; Huang, C. Landsat orbital repeat frequency and cloud contamination: A case study for eastern united states. Photogramm. Eng. Remote Sens. 2019, 85, 109–118. [Google Scholar] [CrossRef]
- Feidas, H.; Cartalis, C. Application of an automated cloud-tracking algorithm on satellite imagery for tracking and monitoring small mesoscale convective cloud systems. Int. J. Remote Sens. 2005, 26, 1677–1698. [Google Scholar] [CrossRef]
- Li, Z.; Roy, D.P.; Zhang, H.K.; Vermote, E.F.; Huang, H. Evaluation of Landsat-8 and Sentinel-2a aerosol optical depth retrievals across Chinese cities and implications for medium spatial resolution urban aerosol monitoring. Remote Sens. 2019, 11, 122. [Google Scholar] [CrossRef]
- King, M.D.; Platnick, S.; Menzel, W.P.; Ackerman, S.A.; Hubanks, P.A. Spatial and temporal distribution of clouds observed by MODIS onboard the terra and aqua satellites. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3826–3852. [Google Scholar] [CrossRef]
- Roy, D.; Lewis, P.; Schaaf, C.; Devadiga, S.; Boschetti, L. The global impact of clouds on the production of modis bidirectional reflectance model-based composites for terrestrial monitoring. IEEE Geosci. Remote Sens. Lett. 2006, 3, 452–456. [Google Scholar] [CrossRef]
- Hagihara, Y.; Okamoto, H.; Yoshida, R. Development of a combined CloudSat-CALIPSO cloud mask to show global cloud distribution. J. Geophys. Res. Atmos. 2010, 115. [Google Scholar] [CrossRef]
- Zhao, G.; Di Girolamo, L. Cloud fraction errors for trade wind cumuli from EOS-Terra instruments. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Strabala, K.I.; Menzel, W.P.; Frey, R.A.; Moeller, C.C.; Gumley, L.E. Discriminating clear sky from clouds with MODIS. J. Geophys. Res. Atmos. 1998, 103, 32141–32157. [Google Scholar] [CrossRef]
- Holz, R.; Ackerman, S.; Nagle, F.; Frey, R.; Dutcher, S.; Kuehn, R.; Vaughan, M.; Baum, B. Global Moderate Resolution Imaging Spectroradiometer (MODIS) cloud detection and height evaluation using CALIOP. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Joseph Hughes, M.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef]
- Chander, G.; Xiong, X.; Choi, T.; Angal, A. Monitoring on-orbit calibration stability of the Terra MODIS and Landsat 7 ETM+ sensors using pseudo-invariant test sites. Remote Sens. Environ. 2010, 114, 925–939. [Google Scholar] [CrossRef]
- Goward, S.N.; Masek, J.G.; Williams, D.L.; Irons, J.R.; Thompson, R. The Landsat 7 mission: Terrestrial research and applications for the 21st century. Remote Sens. Environ. 2001, 78, 3–12. [Google Scholar] [CrossRef]
- Arvidson, T.; Gasch, J.; Goward, S.N. Landsat 7’s long-term acquisition plan—An innovative approach to building a global imagery archive. Remote Sens. Environ. 2001, 78, 13–26. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4–7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Wolfe, R.E.; Roy, D.P.; Vermote, E. MODIS land data storage, gridding, and compositing methodology: Level 2 grid. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1324–1338. [Google Scholar] [CrossRef]
- Masuoka, E.; Fleig, A.; Wolfe, R.E.; Patt, F. Key characteristics of MODIS data products. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1313–1323. [Google Scholar] [CrossRef]
- Wolfe, R.E.; Nishihama, M.; Fleig, A.J.; Kuyper, J.A.; Roy, D.P.; Storey, J.C.; Patt, F.S. Achieving sub-pixel geolocation accuracy in support of MODIS land science. Remote Sens. Environ. 2002, 83, 31–49. [Google Scholar] [CrossRef]
- Markham, B.L.; Storey, J.C.; Williams, D.L.; Irons, J.R. Landsat sensor performance: History and current status. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2691–2694. [Google Scholar] [CrossRef]
- Kovalskyy, V.; Roy, D.P. The global availability of Landsat 5 TM and Landsat 7 ETM+ land surface observations and implications for global 30 m Landsat data product generation. Remote Sens. Environ. 2013, 130, 280–293. [Google Scholar] [CrossRef]
- Ju, J.; Roy, D.P. The availability of cloud-free Landsat ETM+ data over the conterminous United States and globally. Remote Sens. Environ. 2008, 112, 1196–1211. [Google Scholar] [CrossRef]
- Roy, D.P.; Boschetti, L. Southern Africa validation of the MODIS, L3JRC, and GlobCarbon burned-area products. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1032–1044. [Google Scholar] [CrossRef]
- Hall, D.K.; Riggs, G.A. Accuracy assessment of the MODIS snow products. Hydrol. Process. 2007, 21, 1534–1547. [Google Scholar] [CrossRef]
- Mayaux, P.; Lambin, E.F. Tropical forest area measured from global land-cover classifications: Inverse calibration models based on spatial textures. Remote Sens. Environ. 1997, 59, 29–43. [Google Scholar] [CrossRef]
- Ault, T.W.; Czajkowski, K.P.; Benko, T.; Coss, J.; Struble, J.; Spongberg, A.; Templin, M.; Gross, C. Validation of the MODIS snow product and cloud mask using student and NWS cooperative station observations in the lower great lakes region. Remote Sens. Environ. 2006, 105, 341–353. [Google Scholar] [CrossRef]
- Li, Z.; Cribb, M.; Chang, F.; Trishchenko, A. Validation of MODIS-retrieved cloud fractions using whole sky imager measurements at the three arm sites. In Proceedings of the 14th ARM Science Team Meeting, Albuquerque, NM, USA, 22–26 March 2004; pp. 1–6. [Google Scholar]
- Stillinger, T.; Roberts, D.A.; Collar, N.M.; Dozier, J. Cloud masking for Landsat 8 and MODIS Terra over snow-covered terrain: Error analysis and spectral similarity between snow and cloud. Water Resour. Res. 2019, 55, 6169–6184. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | MOD35 Confidence State Combination |
|---|---|
| #1 | Cloudy |
| #2 | Cloudy, Probably Cloudy |
| #3 | Cloudy, Probably Cloudy, Probably Clear |
| Definition | Coefficients | Standard Error of the Coefficients | Standard Error of the Residuals | R2 | p-Value | |
| Linear | #1 | β0: 0.02, β1: 0.89 | β0: 0.0007, β1: 0.0012 | 0.149 | 0.83 | <2^−16 |
| Model | #2 | β0: −0.02, β1: 0.87 | β0: 0.0008, β1: 0.0012 | 0.157 | 0.82 | <2^−16 |
| #3 | β0: −0.10, β1: 0.90 | β0: 0.0011, β1: 0.0016 | 0.186 | 0.74 | <2^−16 | |
| Definition | Coefficients | Standard Error of the Coefficients | Residual Deviance | Null Deviance | p-Value | |
| Logistic | #1 | β0: −2.79, β1: 4.97 | β0: 0.016, β1: 0.026 | 18,194 | 76,678 | <2^−16 |
| Model | #2 | β0: −3.26, β1: 5.11 | β0: 0.019, β1: 0.027 | 18,199 | 76,678 | <2^−16 |
| #3 | β0: −3.91, β1: 5.50 | β0: 0.023, β1: 0.031 | 22,146 | 76,678 | <2^−16 |
| Linear Model | MODIS Cloud Definition #1 Cloud Fraction Interval | ||||
| Residual value | [0, 0.25] | [0.25, 0.50] | [0.50, 0.75] | [0.75, 1] | [0, 1] |
| 25th quantile | −0.022 | −0.097 | −0.100 | −0.007 | −0.032 |
| Median | −0.018 | −0.005 | 0.004 | 0.077 | −0.003 |
| 75th quantile | 0.015 | 0.079 | 0.084 | 0.096 | 0.085 |
| Logistic Model | MODIS Cloud Definition #1 CLOUD Fraction Interval | ||||
| Residual value | [0, 0.25] | [0.25, 0.50] | [0.50, 0.75] | [0.75, 1] | [0, 1] |
| 25th quantile | −0.058 | −0.036 | −0.105 | −0.031 | −0.058 |
| Median | −0.047 | 0.057 | −0.001 | 0.062 | −0.003 |
| 75th quantile | 0.019 | 0.142 | 0.079 | 0.101 | 0.091 |
| Acquisition Date Interval | |||||||
|---|---|---|---|---|---|---|---|
| Jan–Mar | Apr–Jun | Jul–Sep | Oct–Dec | Year | |||
| Linear model | Northern Hemisphere | 5th quantile | −0.394 | −0.217 | −0.161 | −0.264 | −0.258 |
| 25th quantile | −0.086 | −0.036 | −0.020 | −0.044 | −0.038 | ||
| Median | −0.019 | 0.002 | 0.020 | −0.009 | 0.001 | ||
| 75th quantile | 0.079 | 0.089 | 0.095 | 0.081 | 0.089 | ||
| 95th quantile | 0.180 | 0.172 | 0.175 | 0.164 | 0.173 | ||
| Southern Hemisphere | 5th quantile | −0.170 | −0.172 | −0.147 | −0.154 | −0.159 | |
| 25th quantile | −0.022 | −0.019 | −0.019 | −0.022 | −0.020 | ||
| Median | 0.005 | −0.015 | −0.016 | −0.008 | −0.009 | ||
| 75th quantile | 0.088 | 0.054 | 0.053 | 0.071 | 0.069 | ||
| 95th quantile | 0.174 | 0.163 | 0.158 | 0.152 | 0.161 | ||
| Logistic model | Northern Hemisphere | 5th quantile | −0.390 | −0.205 | −0.150 | −0.251 | −0.244 |
| 25th quantile | −0.073 | −0.058 | −0.049 | −0.058 | −0.058 | ||
| Median | −0.030 | 0.008 | 0.027 | −0.012 | 0.003 | ||
| 75th quantile | 0.085 | 0.095 | 0.101 | 0.087 | 0.094 | ||
| 95th quantile | 0.192 | 0.189 | 0.197 | 0.184 | 0.192 | ||
| Southern Hemisphere | 5th quantile | −0.164 | −0.165 | −0.129 | −0.141 | −0.150 | |
| 25th quantile | −0.058 | −0.058 | −0.058 | −0.058 | −0.058 | ||
| Median | 0.004 | −0.034 | −0.038 | −0.012 | −0.021 | ||
| 75th quantile | 0.093 | 0.063 | 0.062 | 0.079 | 0.075 | ||
| 95th quantile | 0.201 | 0.191 | 0.186 | 0.178 | 0.188 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Melchiorre, A.; Boschetti, L.; Roy, D.P. Global Evaluation of the Suitability of MODIS-Terra Detected Cloud Cover as a Proxy for Landsat 7 Cloud Conditions. Remote Sens. 2020, 12, 202. https://doi.org/10.3390/rs12020202
Melchiorre A, Boschetti L, Roy DP. Global Evaluation of the Suitability of MODIS-Terra Detected Cloud Cover as a Proxy for Landsat 7 Cloud Conditions. Remote Sensing. 2020; 12(2):202. https://doi.org/10.3390/rs12020202
Chicago/Turabian StyleMelchiorre, Andrea, Luigi Boschetti, and David P. Roy. 2020. "Global Evaluation of the Suitability of MODIS-Terra Detected Cloud Cover as a Proxy for Landsat 7 Cloud Conditions" Remote Sensing 12, no. 2: 202. https://doi.org/10.3390/rs12020202
APA StyleMelchiorre, A., Boschetti, L., & Roy, D. P. (2020). Global Evaluation of the Suitability of MODIS-Terra Detected Cloud Cover as a Proxy for Landsat 7 Cloud Conditions. Remote Sensing, 12(2), 202. https://doi.org/10.3390/rs12020202