A Priority Data Association Policy for Multitarget Tracking on Intelligent Vehicle Risk Assessment

Abstract
1. Introduction
2. Problem Formulation
2.1. Stochastic System
2.2. Coordinate Turn Process Model
2.3. Radar Nonlinear Measurement Model
2.4. Unscented Kalman Filter
- (1)
- Initialization: Parameters λ, , , Q, and R are chosen for a given initiation state X(0|0), covariance P(0|0), A(0), and Γ(0). If k ≥ 1, the following steps are taken:
- (2)
- Step 1: state prediction:
- (3)
- Step 2: covariance prediction:
- (4)
- Step 3: generate sigma points:
- (5)
- Step 4: measurement prediction based on sigma points:
- (6)
- Step 5: mean measurement prediction:
- (7)
- Step 6: mean measurement covariance prediction:
- (8)
- Step 7: calculate Kalman gain:
- (9)
- Step 8: update state estimation:
- (10)
- Step 9: update covariance estimation:
3. Multitarget Tracking
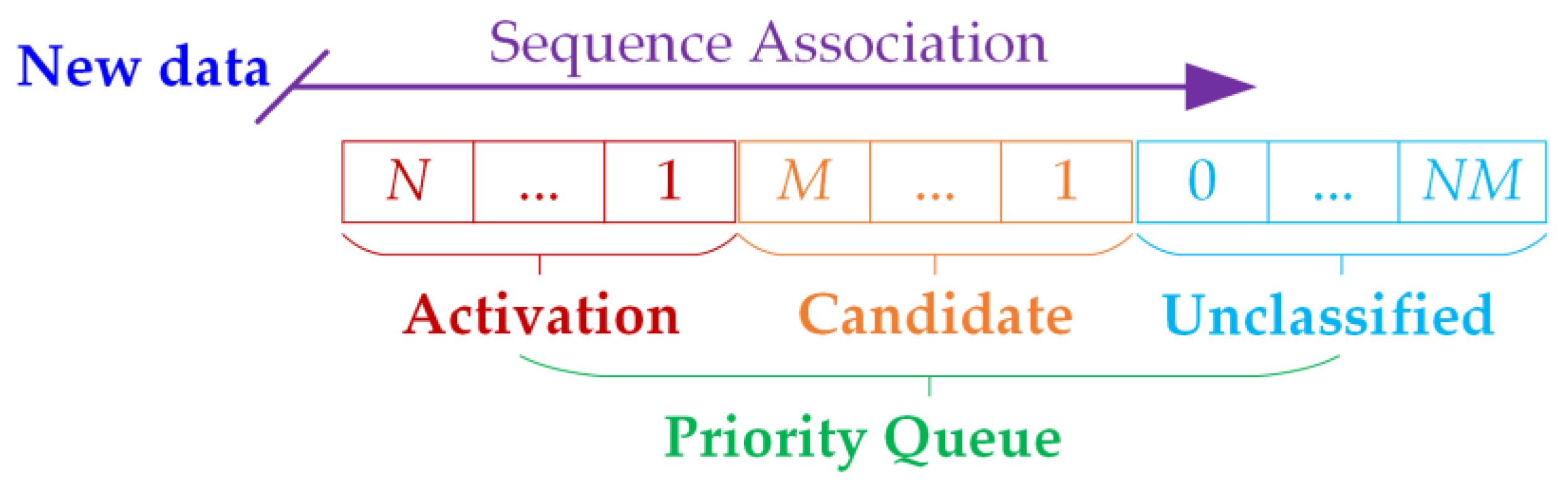
3.1. Priority Data Association Policy
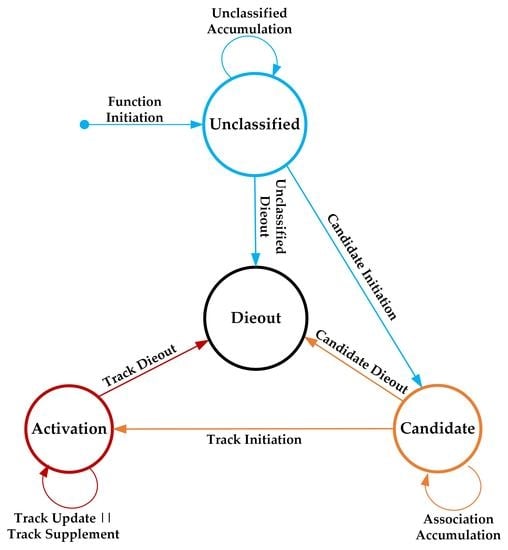
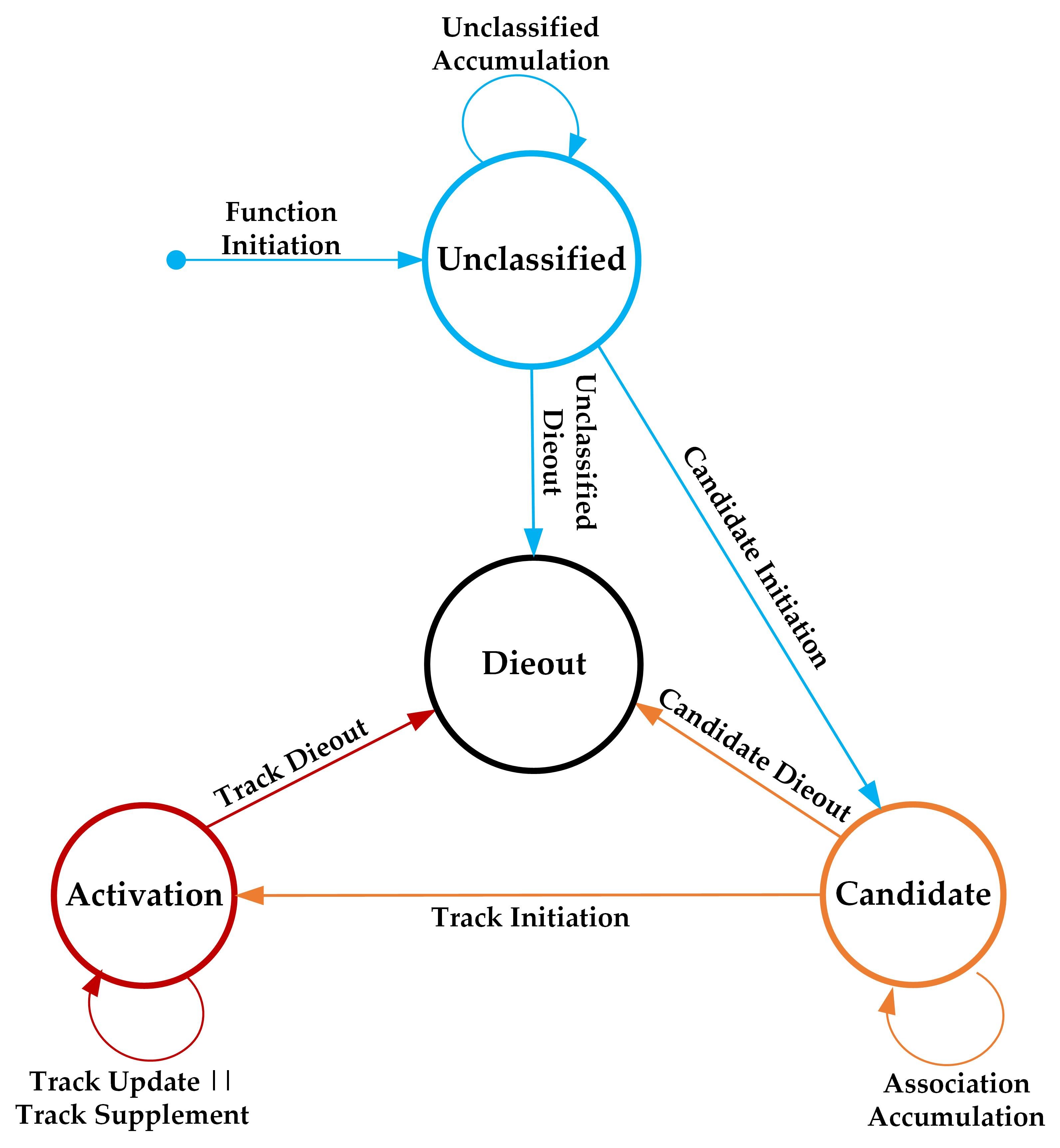
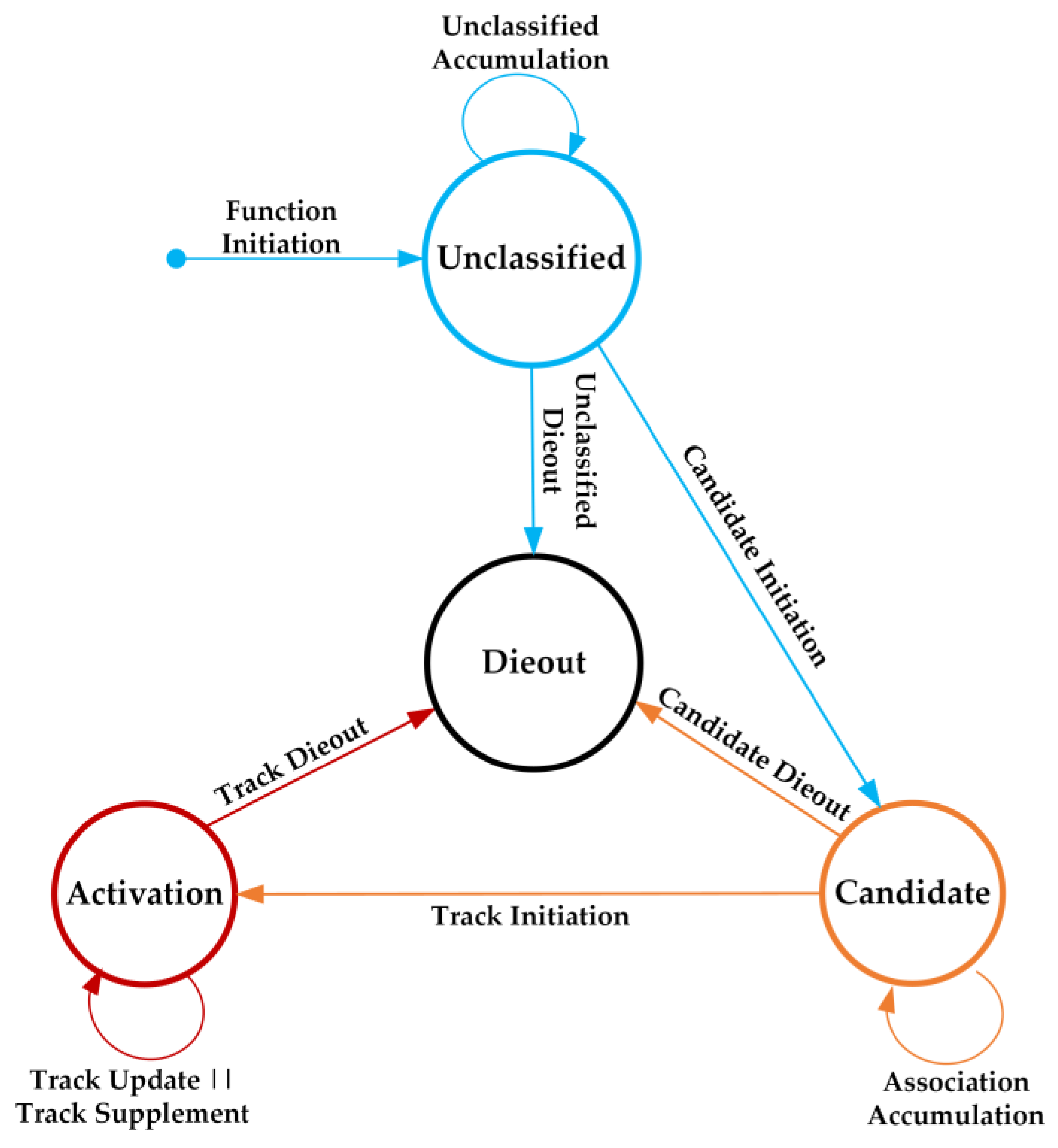
3.2. Track Management
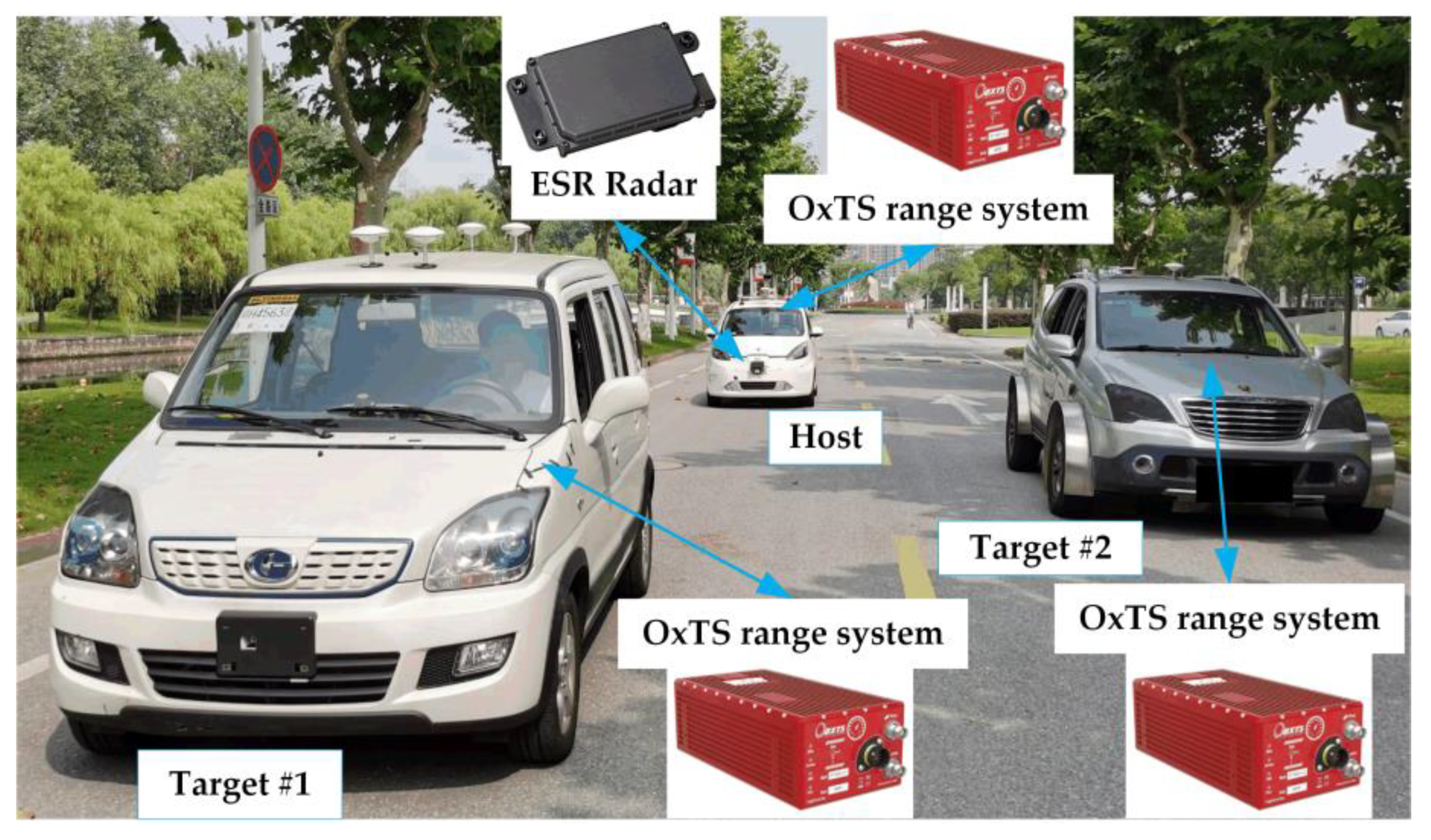
4. Discussion
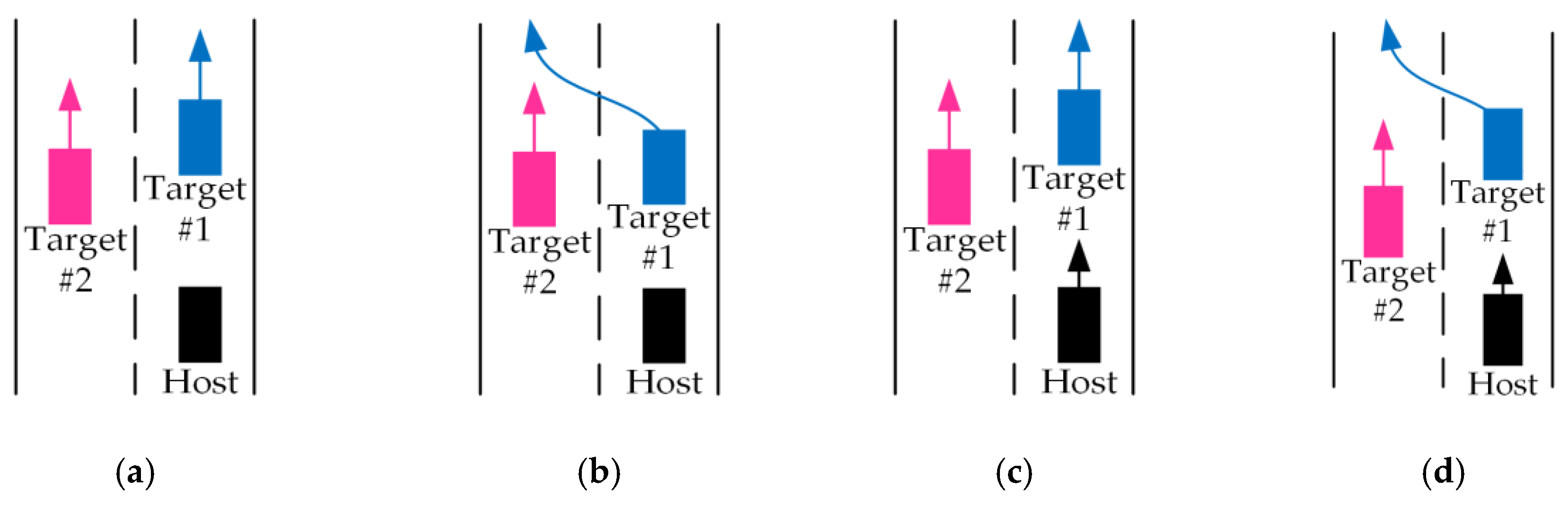
- (1)
- Scenario 1: the host vehicle is stationary and the two target vehicles drive on a straight route;
- (2)
- Scenario 2: the car is stationary, target car #1 changes lanes, and target car #2 drives on a straight route;
- (3)
- Scenario 3: the host vehicle drives on a straight route and the two target cars drive on a straight route;
- (4)
- Scenario 4: the host vehicle drives on a straight route, target car #1 changes lanes, and target car #2 drives on a straight route.
| Algorithm 1. Pseudocode of track management. |
| Input: dnew: the new detected data by radar |
| Data: Tuo: the Unclassified targets from the last cycle |
| Tco: the Candidate targets from the last cycle |
| Tao: the Activation targets from the last cycle |
| Output: Tun: the updated Unclassified targets |
| Tcn: the updated Candidate targets |
| Tan: the updated Activation targets |
| begin |
| if dnew is empty |
| if system is not initiation |
| if Tuo is nonempty |
| Ttp ← Unclassified_accumulation (Tuo) |
| Tun ← Unclassified_dieout (Ttp) |
| end |
| if Tco is nonempty |
| Ttp ← Candidate_accumulation (Tco) |
| Tcn ← Candidate_dieout (Ttp) |
| end |
| if Tao is nonempty |
| Ttp ← Track_dieout (Tao) |
| Tcn ← Track_supplement (Ttp) |
| end |
| else |
| Tun ← empty; Tcn ← empty; Tan ← empty |
| end |
| else |
| if system is not initiation |
| if Tao is nonempty |
| Ttp ← Track_update (Tao, dnew) |
| Tttp ← Track_dieout (Ttp) |
| Tant ← Track_supplement (Tttp) |
| end |
| if Tco is nonempty |
| Tantt, Ttp ← Track_initiation (Tco, dnew) |
| Tttp ← Candidate_accumulation (Ttp) |
| Tcnt ← Candidate_dieout (Tttp) |
| end |
| if Tuo is nonempty |
| Tcntt, Ttp ← Unclassified_accumulation (Tuo, dnew) |
| Tun ← Unclassified_dieout (Ttp) |
| end |
| else |
| Tun ← Unclassified_accumulation (dnew) |
| Tcn ← empty |
| Tan ← empty |
| end |
| Tcn = Tcnt + Tcntt; Tan = Tant + Tantt |
| end |
| Tuo = Tun; Tco = Tcn; Tao = Tan |
| end |
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- De Marvao, A.; Dawes, T.J.; Howard, J.P.; O’Regan, D.P. Artificial intelligence and the cardiologist: What you need to know for 2020. Heart 2020, 106, 399–400. [Google Scholar] [CrossRef] [PubMed]
- Javanmardi, E.; Gu, Y.; Javanmardi, M.; Kamijo, S. Autonomous vehicle self-localization based on abstract map and multi-channel LiDAR in urban area. IATSS Res. 2019, 43, 1–13. [Google Scholar] [CrossRef]
- Maggipinto, M.; Terzi, M.; Masiero, C.; Beghi, A.; Susto, G.A. A computer vision-inspired deep learning architecture for virtual metrology modeling with 2-dimensional data. IEEE Trans. Semicond. Manuf. 2018, 31, 376–384. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, D.; Lv, L.; Zhang, Q. Multi-task learning for dangerous object detection in autonomous driving. Inf. Sci. 2018, 432, 559–571. [Google Scholar] [CrossRef]
- Katrakazas, C.; Quddus, M.; Chen, W.; Deka, L. Real-time motion planning methods for autonomous on-road driving: State-of-the-art and future research directions. Transp. Res. Part C Emerg. Technol. 2015, 60, 416–442. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Rosenband, D.L. Inside Waymo’s self-driving car: My favorite transistors. In Proceedings of the 2017 Symposium on VLSI Circuits, Kyoto, Japan, 5–8 June 2017; pp. C20–C22. [Google Scholar] [CrossRef]
- Cao, Y.; Xiao, C.; Yang, D.; Fang, J.; Yang, R.; Liu, M.; Li, B. Adversarial objects against lidar-based autonomous driving systems. arXiv 2019, arXiv:1907.05418. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Uber’s Deadly Self-Driving Accident: What We Know So Far. Available online: https://www.extremetech.com/extreme/265945-ubers-deadly-accident-know-happened (accessed on 20 March 2018).
- Self-Driving Car Crash in Arizona: Red Light Runner Hits Waymo Van. Available online: https://www.abc15.com/news/region-southeast-valley/chandler/waymo-car-involved-in-chandler-arizona-crash (accessed on 4 May 2018).
- Moreno, F.A.; Monroy, J.; Ruiz-Sarmiento, J.R.; Galindo, C.; Gonzalez-Jimenez, J. Automatic Waypoint Generation to Improve Robot Navigation Through Narrow Spaces. Sensors 2020, 20, 240. [Google Scholar] [CrossRef]
- Xie, G.; Gao, H.; Qian, L.; Huang, B.; Li, K.; Wang, J. Vehicle Trajectory Prediction by Integrating Physics- and Maneuver-Based Approaches Using Interactive Multiple Models. IEEE Trans. Ind. Electron. 2018, 65, 5999–6008. [Google Scholar] [CrossRef]
- Kim, B.; Yi, K.; Yoo, H.; Chong, H.; Ko, B. An IMM/EKF Approach for Enhanced Multitarget State Estimation for Application to Integrated Risk Management System. IEEE Trans. Veh. Technol. 2015, 64, 876–889. [Google Scholar] [CrossRef]
- Fortin, B.; Lherbier, R.; Noyer, J. A Model-Based Joint Detection and Tracking Approach for Multi-Vehicle Tracking With Lidar Sensor. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1883–1895. [Google Scholar] [CrossRef]
- Frohle, M.; Granstrom, K.; Wymeersch, H. Multiple Target Tracking With Uncertain Sensor State Applied To Autonomous Vehicle Data. In Proceedings of the 2018 IEEE Statistical Signal Processing Workshop (SSP), Freiburg, Germany, 10–13 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Eltrass, A.; Khalil, M. Automotive radar system for multiple-vehicle detection and tracking in urban environments. IET Intell. Transp. Syst. 2018, 12, 783–792. [Google Scholar] [CrossRef]
- Kaempchen, N.; Weiss, K.; Schaefer, M.; Dietmayer, K.C.J. IMM object tracking for high dynamic driving maneuvers. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 825–830. [Google Scholar] [CrossRef]
- Hillenbrand, J.; Spieker, A.M.; Kroschel, K. A Multilevel Collision Mitigation Approach—Its Situation Assessment, Decision Making, and Performance Tradeoffs. IEEE Trans. Intell. Transp. Syst. 2006, 7, 528–540. [Google Scholar] [CrossRef]
- Schubert, R.; Richter, E.; Wanielik, G. Comparison and evaluation of advanced motion models for vehicle tracking Cologne. In Proceedings of the 2008 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Song, D.; Tharmarasa, R.; Kirubarajan, T.; Fernando, X.N. Multi-Vehicle Tracking With Road Maps and Car-Following Models. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1375–1386. [Google Scholar] [CrossRef]
- Stéphanie, L.; Vasquez, D.; Laugier, C. A survey on motion prediction and risk assessment for intelligent vehicles. Robomech J. 2014, 1, 1–14. [Google Scholar] [CrossRef]
- Khazraj, H.; Faria da Silva, F.; Bak, C.L. A performance comparison between extended Kalman Filter and unscented Kalman Filter in power system dynamic state estimation. In Proceedings of the 2016 51st International Universities Power Engineering Conference (UPEC), Coimbra, Portugal, 6–9 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Leung, H.; Hu, Z.; Blanchette, M. Evaluation of multiple radar target trackers in stressful environments. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 663–674. [Google Scholar] [CrossRef]
- Ding, Z.; Hong, L. Bias phenomenon and compensation for PDA/JPDA algorithms. Math. Comput. Model. 1998, 27, 1–16. [Google Scholar] [CrossRef]
- Blom, H.A.P.; Bloem, E.A. Probabilistic data association avoiding track coalescence. IEEE Trans. Autom. Control 2000, 45, 247–259. [Google Scholar] [CrossRef]
- Hyun, E.; Lee, J. Multi-target tracking scheme using a track management table for automotive radar systems. In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Lee, M.S.; Kim, Y.H. Automotive radar tracking of multi-target for vehicle CW/CA systems. Mechatronics 2004, 14, 143–151. [Google Scholar] [CrossRef]
- Schuster, M.; Reuter, J.; Wanielik, G. Tracking of vehicles on nearside lanes using multiple radar sensors. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Partovibakhsh, M.; Liu, G. An Adaptive Unscented Kalman Filtering Approach for Online Estimation of Model Parameters and State-of-Charge of Lithium-Ion Batteries for Autonomous Mobile Robots. IEEE Trans. Control Syst. Technol. 2014, 23, 357–363. [Google Scholar] [CrossRef]
- Sarkka, S. On Unscented Kalman Filtering for State Estimation of Continuous-Time Nonlinear Systems. IEEE Trans. Autom. Control AC 2007, 52, 1631–1641. [Google Scholar] [CrossRef]
- Santhanagopalan, S.; White, R.E. State of charge estimation using an unscented filter for high power lithium ion cells. Int. J. Energy Res. 2010, 34, 152–163. [Google Scholar] [CrossRef]
- Partovibakhsh, M.; Liu, G. Online estimation of model parameters and state-of-charge of Lithium-Ion battery using Unscented Kalman Filter. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 3962–3967. [Google Scholar] [CrossRef]
- Eltoukhy, M.; Ahmad, M.O.; Swamy, M.N.S. An Adaptive Turn Rate Estimation for Tracking a Maneuvering Target. IEEE Access 2020, 8, 94176–94189. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NNDA-CT-UKF | PDAP-CT-UKF | ||||
|---|---|---|---|---|---|
| MRMS | Total Tracked Targets | MRMS | Total Tracked Targets | ||
| Scenario 1 | Target #1 | 0.7416 m | 25 | 0.7416 m | 23 |
| Target #2 | 0.7498 m | 0.7498 m | |||
| Scenario 2 | Target #1 | 0.4348 m | 39 | 0.4348 m | 36 |
| Target #2 | 0.7854 m | 0.7854 m | |||
| Scenario 3 | Target #1 | 0.7032 m | 46 | 0.7032 m | 40 |
| Target #2 | 0.9493 m | 0.9493 m | |||
| Scenario 4 | Target #1 | 0.7645 m | 68 | 0.7645 m | 64 |
| Target #2 | 0.8497 m | 0.8497 m | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, D.; Xiong, L.; Yu, Z.; Chen, Q.; Fu, Z.; Li, Z.; Zhang, P.; Xu, P.; Qian, Z.; Xiao, H.; et al. A Priority Data Association Policy for Multitarget Tracking on Intelligent Vehicle Risk Assessment. Remote Sens. 2020, 12, 3255. https://doi.org/10.3390/rs12193255
Zeng D, Xiong L, Yu Z, Chen Q, Fu Z, Li Z, Zhang P, Xu P, Qian Z, Xiao H, et al. A Priority Data Association Policy for Multitarget Tracking on Intelligent Vehicle Risk Assessment. Remote Sensing. 2020; 12(19):3255. https://doi.org/10.3390/rs12193255
Chicago/Turabian StyleZeng, Dequan, Lu Xiong, Zhuoping Yu, Qiping Chen, Zhiqiang Fu, Zhuoren Li, Peizhi Zhang, Puhang Xu, Zixuan Qian, Hongyu Xiao, and et al. 2020. "A Priority Data Association Policy for Multitarget Tracking on Intelligent Vehicle Risk Assessment" Remote Sensing 12, no. 19: 3255. https://doi.org/10.3390/rs12193255
APA StyleZeng, D., Xiong, L., Yu, Z., Chen, Q., Fu, Z., Li, Z., Zhang, P., Xu, P., Qian, Z., Xiao, H., Fang, P., Li, Z., & Leng, B. (2020). A Priority Data Association Policy for Multitarget Tracking on Intelligent Vehicle Risk Assessment. Remote Sensing, 12(19), 3255. https://doi.org/10.3390/rs12193255