1. Introduction
Maize plays an important role among the world’s cereal crops; it is used in food, fodder, and bioenergy production. High and stable maize yields are crucial to global food security. Lodging is a natural plant condition that reduces the yield and quality of various crops. In terms of different displacement positions, crop lodging can be divided into stem lodging (Lodging S) and root lodging (Lodging R). Lodging S involves the bending of crop stems from their upright position, while Lodging R refers to damage or failure to the plant’s root-soil anchorage system [
1]. Due to maize lodging, harvest losses could be as high as 50% [
2]. Timely and exact identification of maize lodging is essential for estimating yield loss, making comprehensive production decisions and supporting insurance compensation. The traditional approaches to lodging investigation rely on manual measurements made at plots, which is time consuming, laborious, inefficient, and unsuitable for large-scale lodging surveys.
Currently, given the rapid evolution of remote sensing techniques, an increasing number of scholars have used remote sensing imagery combined with various feature-extraction tools to obtain crop lodging information. Li et al. [
3] investigated the potential for maize lodging extraction and feature screening from satellite remote sensing imagery based on the difference in texture values between lodging and nonlodging areas. Based on the changes in vegetable index (VI) features under lodging and nonlodging maize, Wang et al. [
2] reported that the correlation between the changes and the lodging percentage could be used as a standard to select effective features. Crop lodging is frequently accompanied by adverse weather; hence, there is no guarantee that seasonable images can be obtained successfully due to the limited capabilities of optical satellites in poor weather conditions. In contrast to optical sensors, the spaceborne synthetic aperture radar (SAR) technique is not only robust to severe weather adverse effects but also provides abundant information regarding the structure of vegetation. SAR technology is currently widely used to discriminate between lodging and nonlodging crops. By utilizing the fully polarimetric C-band radar images, Yang et al. [
4] explored the difference between lodging and nonlodging wheat areas in various growth periods. Chen et al. [
5] reported on polarimetric features extracted from consecutive RADARSAT-2 data to identify sugarcane lodging areas. However, due to its low spatial resolution, the SAR technique is more applicable to large and relatively homogeneous crop planting areas than to small and heterogeneous plots [
6].
To precisely extract lodging areas within a small patchwork field, unmanned aerial vehicles (UAV) can acquire remote sensing images that offer both high temporal and spatial resolution and have strong operability [
7]. At present, researchers usually employ UAV images and their features acquired shortly after lodging to identify crop lodging at the field scale. The identified crops are mainly in the vigorous growth period. During this period, lodging crops and nonlodging crops have similar growth conditions, but their leaf color is quite different, which can be observed in UAV images. Therefore, high-accuracy identification results of maize lodging can be achieved by applying only red-green-blue (RGB) or multispectral images.
Using UAV-collected multispectral, RGB, and thermal infrared imagery, image features such as texture features, VI, and canopy structure features can be derived from these UAV images. Based on extracted feature information, single- and multiple-class feature sets (SFS and MFS, respectively) can be constructed and used for lodging identification [
8]. SFSs can be used to promptly and efficiently recognize lodging areas due to their low data dimensions and straightforward computation. RGB, multispectral imagery, and VI were introduced to extract crop lodging based on the leaf color discrepancy between lodging and nonlodging areas [
9]. However, this discrepancy experiences interference from different crop varieties and fertilization treatments. To address this situation, Liu et al. [
10] reported that although thermal infrared images have low spatial resolution, features extracted from them are beneficial for lodging assessment. In addition, the patterns, shapes, and sizes of vegetation in UAV imagery can be quantitatively described by analyzing texture characteristics; thus, they have been widely employed in lodging assessment research [
11]. However, these features also have some defects. For instance, it is difficult to determine the optimal scale and moving direction for the texture window. More recently, the canopy structure feature (CSF) has been broadly applied to determine whether lodging has occurred and, ultimately, to estimate lodging severity, which fosters accurate monitoring of crop lodging [
12]. However, these features are likely to be limited by adverse field environments and high experimental consumption; therefore, SFS often cannot fully reflect the crop lodging properties under intricate field environments, and MFSs have been used more frequently in recent years. For example, by combining the digital surface model (DSM) and texture information, crop lodging recognition can be performed with reliable accuracy [
13]. Based on a feature set containing color and texture features, adding temperature information also greatly improved the recognition accuracy of indica rice lodging [
10]. In addition, the probability that lodging has occurred can be predicted by using a feature set containing the canopy structure and the VI feature [
14].
Nevertheless, MFSs have a data redundancy defect that causes greater consumption of computing resources and reduces the identification efficiency, necessitating optimal feature selection. The number of studies regarding screening methods for lodging identification is limited. The existing methods rely mainly on the difference evaluation index, which has less computational overhead [
1,
15,
16]. However, these methods do not consider the interactions between features, and there is no clear standard for determining the most appropriate feature dimension. While the feature numbers can be explicitly determined by utilizing single-feature probability values based on a Bayesian network [
13], this approach assumes that all features are mutually independent and that no correlation occurs between the selected features. Han et al. [
14] reported that univariate and multivariate logistic regression analysis methods can be used to screen lodging features. Although this method explores the underlying relationship between the outcome and the selected factors, it is not suitable for high-dimensional feature sets because of its complex screening process.
Therefore, the main purpose of this study is to construct a simple and efficient feature screening method for lodging recognition under complicated field environments that also considers the interactions between features. We verify the feasibility and stability of the proposed method under both high- and low-dimensional circumstances. The primary objectives are (1) to analyze the changes in lodging extraction accuracy under different texture window sizes and to determine the optimal window size that results in the maximal accuracy; (2) to determine the optimal screening method by comparing the accuracy of maize lodging results based on different feature screening methods; and (3) to extract maize lodging areas by using the optimal feature screening method and various classifications.
2. Materials and Methods
2.1. Study Area
The maize field trial was conducted at Youyi Farm, Youyi County, Heilongjiang Province in China (46°44′N, 131°40′E), which covers an area of approximately 17.29 hectares. The area has a temperate continental monsoon climate with four distinct seasons, rain and heat occur during the same period, and the soil type is dark brown soil with high fertility.
The maize planted in this experimental plot was sown on 6 May 2019, and harvested on 14 September 2019. Maize lodged on 28 July 2018, and multispectral imagery (
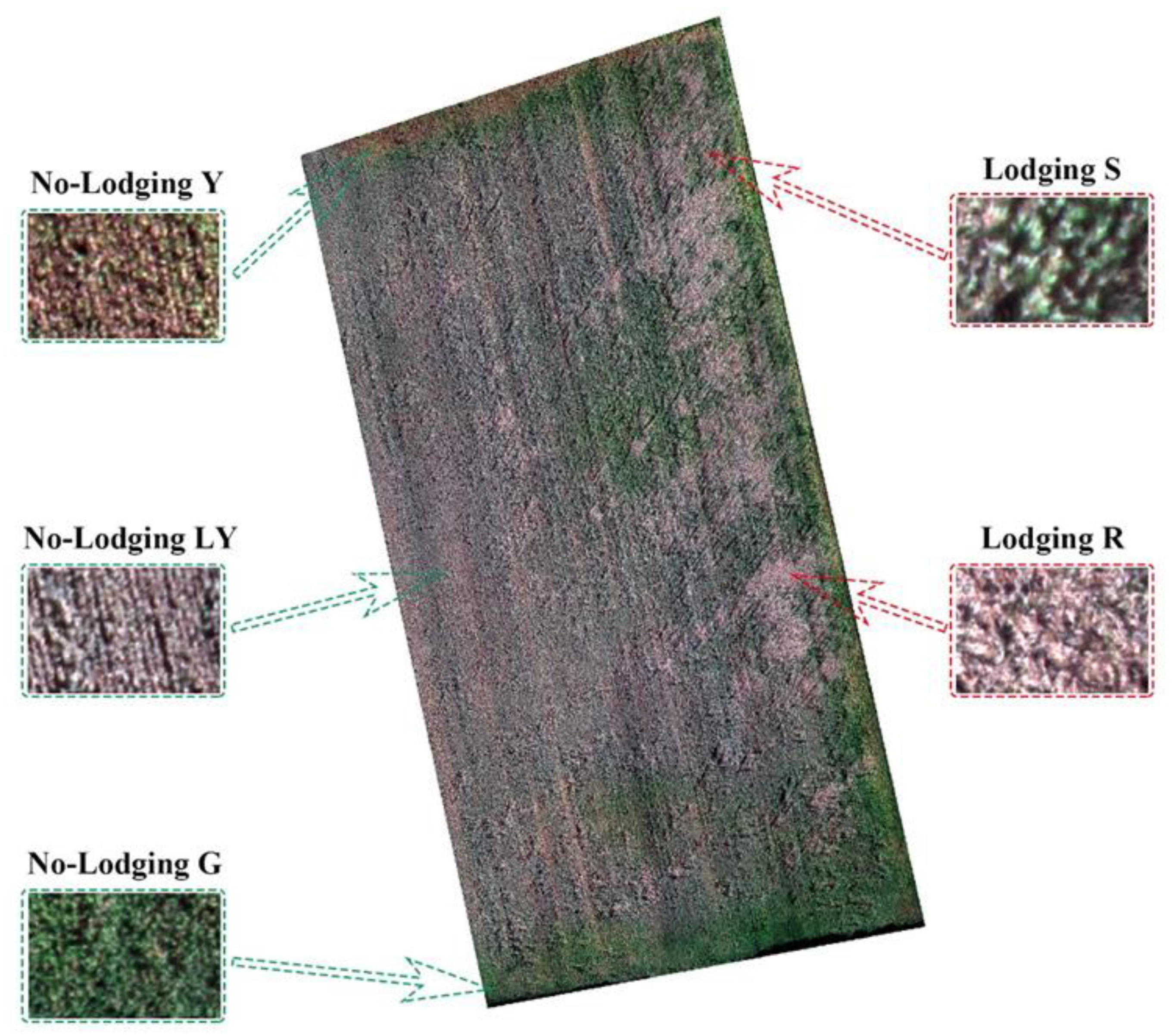
Figure 1) was acquired on 12 September 2019. In the study site, which is affected by natural factors such as high winds, difficult terrain, and soil, water, and fertilizer transportation problems, maize development is diverse and exists in both development and mature periods. In
Figure 1c, the typical yellow areas show maize in the mature period, and its growth is better than that of the typical green area maize in the development period. Maize lodging can be divided into the two groups shown in
Figure 2: Lodging S and Lodging R. Compared with Lodging S, Lodging R is more serious. The nonlodging maize includes three classes (
Figure 2): maize with green leaves (No-Lodging G), maize with yellow leaves (No-Lodging Y), and maize with yellowish leaves (No-Lodging LY). The growth of No-Lodging LY is better than that of the other two categories. Influenced by the edge effect [
17], the growth status of No-Lodging Y is the worst.
2.2. Image Collection
This study used a RedEdge 3 camera equipped with a DJI M600 Pro UAV system (SZ DJI Technology Co., Shenzhen, China) to record multispectral images with five bands (
Table 1) on 12 September 2018, and 10 April 2019. The camera has a resolution of 1280 × 960 pixels and a lens focal length of 5.5 mm. By using DJI GS Pro 1.0 (version 1.0, SZ DJI Technology Co., Shenzhen, China) software, the overflight speeds were set to 7 m/s and a flight altitude 110 m above ground level. The forward and lateral overlaps were configured to 80% and 79%, respectively, which yielded UAV images with a ground sampling distance of 7.5 cm.
2.3. Data Processing
The agricultural multispectral processing module in Pix4Dmapper 4.4 was used to automatically generate multispectral imagery and DSM. The fundamental working flow includes (1) radiometric calibration, (2) structure-from-motion (SFM) processing, (3) spatial correction, and (4) orthoimage and DSM generation. By employing radiometric calibration images and reflectance values, radiometric calibration can be performed for every image. Using the overlapping images, SFM processing recreates their positions and orientations in a densified point cloud by using automatic aerial triangulation. Based on four ground control points (manually collected before image acquisition), the three-dimensional point cloud was corrected during the stitching process and subsequently used to construct orthoimages and DSM.
Based on the multispectral imagery, the study area was divided into 119 blocks using the created fishnet function provided by ArcGIS 10.2. Then, 89 blocks were selected as the modeling areas and 30 as the verification areas. In the modeling areas, 643 maize lodging samples and 654 nonlodging samples were collected, marked as “1” and “0,” respectively. These maize samples were subjected to binary logistic regression classification (BLRC), texture information extraction and feature screening. We also selected 50 samples each of lodging and nonlodging maize from the verification areas to calculate the precision of all the lodging identification results in this study.
2.4. Feature Set Construction
Three SFSs for maize lodging recognition were extracted from multispectral imagery that included eight spectral features, 41 texture features, and nine CSFs. Moreover, we constructed all the possible feature sets of these three SFSs to build the MFSs.
2.4.1. Spectral Feature Set
In general, the spectral reflectance of vegetation changes after lodging. To take full advantage of this change, five multispectral image bands were added to the spectral feature set. The VI quantitatively reflects the growing situation of vegetation and the vegetation coverage [
18,
19]. In this study, three types of VI (see
Table 2) were derived to expand the difference between lodging and nonlodging areas. Based on the above image features, a spectral feature set was constructed to identify maize lodging.
2.4.2. Canopy Structure Feature Set
Based on the multispectral images of maize lodging and bare land collected by UAV, we constructed two DSMs of the study site. The DSM of bare land, which is not affected by maize height, can be considered as the digital elevation model (DEM) of the study area. The DSM of maize lodging was subtracted from the DEM to generate a canopy height model (CHM), which was employed to calculate nine CSFs (
Table 3).
2.4.3. Texture Feature Set
Texture features can express the pattern, size, and shape of various objects by measuring the adjacency relationship and frequency of gray-tone changes of pixels [
33]. Based on texture features, the spatial heterogeneity of remote sensing images can be expressed quantitatively [
34]. The calculation approaches of texture features are usually divided into four types: structural, statistical, model-based, and transformation approaches. At present, the statistical approaches are widely used in lodging recognition research, and the high accuracy of lodging monitoring results can be derived. In addition, the statistical approaches have proved to be superior to structural and transformation approaches. Therefore, the different measurement levels in statistical approaches (the gray-level cooccurrence matrices and gray-level difference matrices) were selected to calculate the texture features of remote sensing images. The gray-level cooccurrence matrices (GLCM) and gray-level difference matrices (GLDM) have been broadly used to quantitatively describe texture features that can be applied in image classification and parameter inversion [
35].
To fully describe the details of the lodging and nonlodging maize in the image, we analyzed as many different types of texture features as possible based on the GLCMs and GLDMs. In this study, eight types of GLCM texture measures [
36] (mean, variance, homogeneity, contrast, dissimilarity, entropy, second moment, and correlation) and five types of GLDM texture measures [
37] (data range, mean, entropy, variance, and skewness) were extracted to construct a texture feature set to discriminate between lodging and nonlodging areas. Based on the average reflectivity of three bands (the red, green, and blue bands), red-edge, near-infrared bands and CHM, 41 texture measures were obtained. Specifically, we calculated only the mean texture features (GLCM and GLDM) of CHM to reduce data redundancy.
To speed up the processing, the texture features extracted from CHM were not used when determining the optimal texture window size. Fifteen different sizes of sliding windows were calculated based on the texture feature set without the mean texture features of CHM: 3 × 3, 5 × 5, 7 × 7, 9 × 9, 11 × 11, 13 × 13, 15 × 15, 17 × 17, 19 × 19, 21 × 21, 31 × 31, 41 × 41, 51 × 51, 61 × 61 and 71 × 71. Based on maximum likelihood classification (MLC), we analyzed the variations in the Kappa coefficient and the overall accuracy with the different window sizes. The difference index (DI) value of the texture feature with the highest classification accuracy was calculated. Finally, the filter window corresponding to the minimum DI value was adopted as the optimal texture window size for maize lodging extraction. To analyze the suitability of the selected optimal texture window, the areas of single lodging and nonlodging maize in multispectral images were measured as 1.55 m2 and 0.17 m2, respectively. In addition, we measured the area of small-scale maize lodging as 2.21 m2.
The formula for DI calculation is as follows:
where
SD1 and
SD2 are the standard deviations of the lodging and nonlodging samples, respectively, and
MN1 and
MN2 are the means of the lodging and nonlodging samples, respectively.
2.5. Feature Screening
2.5.1. Feature Screening Based on Akaike Information Criterion (AIC) Method
The Akaike information criterion (AIC), which is an information criterion based on the concept of entropy, can be used to select statistical models by evaluating the accuracy and complexity of the model [
38,
39]. In general, AIC must be combined with a logistic regression model to achieve feature selection. Therefore, in this study, we introduced binary logistic regression to describe the relationships between features, which can also help predict the probability of lodging.
In this study, the independent variables of the binary logistic regression model were the maize lodging recognition features, and the dependent variables were binary variables with a value of 1 or 0, representing lodging or nonlodging maize, respectively. The maximum likelihood method was used to estimate the parameters of the binary logistic regression model. Following this approach, the binary logistic regression model for predicting the occurrence probability of lodging is
where
are the features to be screened,
is the intercept, and
are regression coefficients.
The maize samples were divided into a training set and a testing set, and the AIC value of the model was calculated as follows:
where
stands for the natural logarithm.
is the maximum likelihood function value of the logistic regression model, which indicates the probability that the model will result in a correct classification, and
is the number of parameters in the logistic regression model.
When calculating the AIC value of the binary logistic regression model, three-tenths of 1297 maize samples were randomly selected as the training set, and the remaining maize samples were used as the testing set. The dependent variables in the model were eliminated along the decreasing direction of the AIC value until the AIC value reached its lowest point. Finally, the parameters contained in the model with the lowest AIC values were regarded as the optimal features.
2.5.2. Feature Screening Based on Index Method
Variation coefficients and relative differences have a wide range of applications in screening and analyzing the image features of crop lodging [
6,
7]. The variation coefficient directly reflects the dispersion degree of lodging and nonlodging crops in the image features, while the relative difference indicates the difference between the lodging and nonlodging areas based on the image characteristics. Features suitable for lodging identification should have low variation coefficients and high relative differences.
This study adopts the variation coefficient and relative difference as two evaluation indicators for feature selection. First, the variation coefficient and relative difference of the lodging and nonlodging areas in features were calculated, and the ten features with the largest relative difference were selected as predictors for lodging recognition. Based on these predictors, the factor whose variation coefficient was less than 20.57% was selected as the optimal feature to ensure classification stability.
The formulas to calculate the variation coefficient and relative difference are as follows:
where
CV denotes the variation coefficient;
sd and
mn represent the standard deviation values of maize samples;
RD denotes the relative difference;
mn1 and
mn2 represent the mean values of maize samples; and
ABS is the absolute value algorithm.
2.6. Lodging Maize Identification
BLRC, MLC, and random forest classification (RFC) are specialized for maize lodging identification using image features. The samples used as inputs to the MLC and RFC were randomly collected by using the “region of interest” (ROI) tools provided by ENVI version 5.1. The distribution of the ROI regions was uniform, which made the samples highly representative of the lodging and nonlodging maize in the entire study area. Then, 27 and 28 ROI regions were selected for lodging and nonlodging maize samples, respectively. The total numbers of sample pixels representing lodging and nonlodging maize were 58,819 and 61,747 pixels, respectively. In terms of shadow, according to the predecessor’s processing method [
9], shadows with areas of more than 5.41 m
2 were placed into the lodging class to reduce the influence of shadows on the classification process.
2.6.1. Binary Logistic Regression Classification (BLRC)
Logistic regression is a generalized linear regression model that can explain the relationships between variables. This model has been extensively applied to classification and regression problems. Because lodging recognition is a binary classification problem in this study, we adopted a binary logistic regression model as a classifier [
40].
In this binary logistic regression model, the maize sample values extracted from different image features form the independent variables. The predicted dependent variable is a function of the probability that maize lodging will occur. Moreover, there is a basic assumption about the dependent variable: the probability of the dependent variable takes the value of 1 (positive response). According to the logistic curve, the value of the dependent variable can be calculated using the following formula [
41]:
where
P represents the probability of maize lodging (the dependent variable);
X indicates the independent variables; and
C represents the estimated parameters.
The logit transformation was performed to linearize the above model and eliminate the 0/1 boundaries for the original dependent variable, which is the probability. The new dependent variable is boundless and continuous within the range from 0 to 1. After logit transformation, the above model is expressed by the following equation:
where
P represents the probability of maize lodging (the dependent variable),
X1, X2, X3, …, Xk are the independent variables, and
C0, C1, C2, …, Ck represent the estimated parameters.
The binary logistic regression model for predicting maize lodging probability encoded by R programming language was trained using R Studio software. The encoded program automatically determined the coefficients of all independent variables according to the relationship between independent and dependent variables. The fitted model was inputted into the “Band Math” module of ENVI software to obtain the lodging probability map of the study area. Finally, a uniform and optimal probability threshold was determined for all pixels to judge whether they represented lodging.
2.6.2. Maximum Likelihood Classification (MLC)
MLC is a nonlinear discriminant function based on the Bayesian rule that is suitable for processing low-dimensional data [
42]. MLC assumes that a hyper ellipsoid decision volume can be applied to approximate the shapes of the data clusters. The mean vector and covariance matrix of specified unknown pixels in each class is calculated. The probability of each pixel’s class is then analyzed, and the pixel is predicted to belong to the class with the maximum probability [
43]. In this study, the MLC module from the ENVI software was used to identify maize lodging. The data scale factor, which is a major parameter in the classifier, was set to 1.0 in each classification. This is mainly because the UAV images and their characteristics involved in this study are floating-point data. The UAV image features and ROI regions were provided as the input data for the MLC to generate the maize lodging recognition results.
2.6.3. Random Forest Classification (RFC)
The random forest algorithm is an ensemble learning method based on the decision tree method that has been applied to both object classification and regression analysis of high-dimensional data [
44]. In the random forest algorithm, all the decision trees are trained on a bootstrapped sample of the original training data. To completely divide the variable space, the split node in each decision tree is randomly selected from the input samples. Only two-thirds of the input samples are involved in the building of each decision tree. The remaining one-third of the samples, which are called out-of-bag (OOB) samples, are used to validate the accuracy of the prediction. Finally, the prediction result is obtained through a majority voting strategy of the individual decision trees [
45,
46,
47]. In this study, the RFC program [
48] embedded in ENVI software was employed to identify maize lodging, and two parameters were tuned to generate the optimal RFC model: the number of split nodes and the number of decision trees. The optimal parameters were determined according to the accuracy of the lodging classification results. In each classification, both were reset to adapt to different feature sets.
2.7. Accuracy Assessment of Lodging Detection Results
The Kappa coefficient is an index used to measure the spatial consistency of classification results; it explicitly reveals the spatial change in the classification results [
49]. The overall accuracy (OA) reflects the quality of the classification result in terms of quantity [
50]. In this study, the above indicators were chosen to evaluate the correctness of maize lodging detection results.
Some scholars believe that the Kappa coefficient is discontinuous and marginal in the evaluation of remote sensing image classification results [
51]. However, these views are held only at the theoretical level and lack sufficient practical proof, especially in the study of binary classification based on remote sensing images. In general, remote sensing images and features are not considered to be independent, which is the main reason for the failure of confusion matrix and kappa coefficient [
52]. The nonoverlapping ROI or sample points of lodging and nonlodging maize needed by model training were selected before image classification. Consequently, in each image feature, the values of lodging and nonlodging maize were independent and had no influence on each other. Supported by a large number of remote sensing application practices [
53,
54], this study uses the Kappa coefficient as the evaluation index for lodging recognition results.
2.8. Traditional Crop Lodging Identification Method
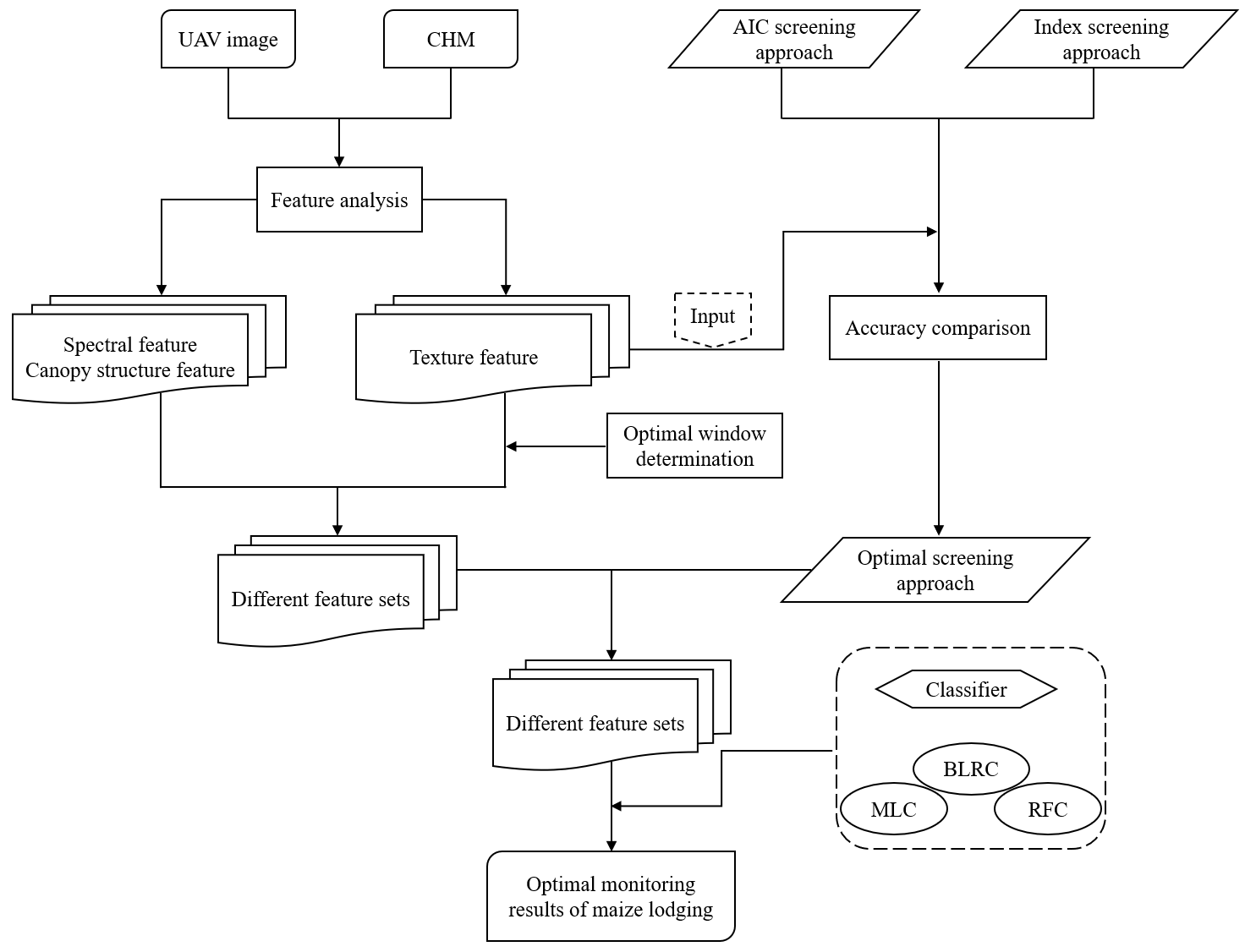
The main process of traditional crop lodging identification is as follows. First, different types of image features—color, spectral reflectance, vegetation index, GLCM texture, and canopy structure—are extracted from RGB and multispectral images. Certain image features are selected, and the optimal features are obtained by using the index method or prior knowledge. Finally, the optimal features and manually selected ROIs are input into the supervised classification model to obtain the recognition results of crop lodging in the plot.
There are three main differences between our new proposed method and the traditional method: (1) more image features (compared to less than 20 features in previous studies) are extracted to determine whether they are suitable for maize lodging identification under complicated field environments. (2) Both GLCM texture and GLDM texture are used for maize lodging recognition. In addition, the optimal GLCM and GLDM texture window sizes are determined. (3) The AIC method is used to screen the maize lodging identification features.
4. Discussion
In this study, nine CSFs, 41 texture features, and eight spectral features of maize in the study area were extracted based on UAV multispectral images and CHM. The different types of image characteristics can not only describe the discrepancies between lodging and nonlodging areas from various aspects but also establish information complementarity during classification. Therefore, we constructed all possible feature sets (SFS and MFS) of the above features as potential factors for the identification of lodging maize. After screening the above feature sets by the AIC method, MLC, BLRC, and RFC were implemented to identify maize lodging. Finally, we obtained the optimal maize lodging recognition result by analyzing the verification results. The present study offers a novel method for monitoring maize lodging. The results revealed that the AIC method is effective and helpful for discriminating among maize lodging and nonlodging areas.
4.1. Optimal Texture Window Size
The precision of image classification based on texture measures relies primarily on the size of the texture window and the size of the target object [
34]. At present, accuracy evaluation indexes such as the Kappa coefficient and OA are usually used to determine the optimal texture window size for target recognition in images [
55,
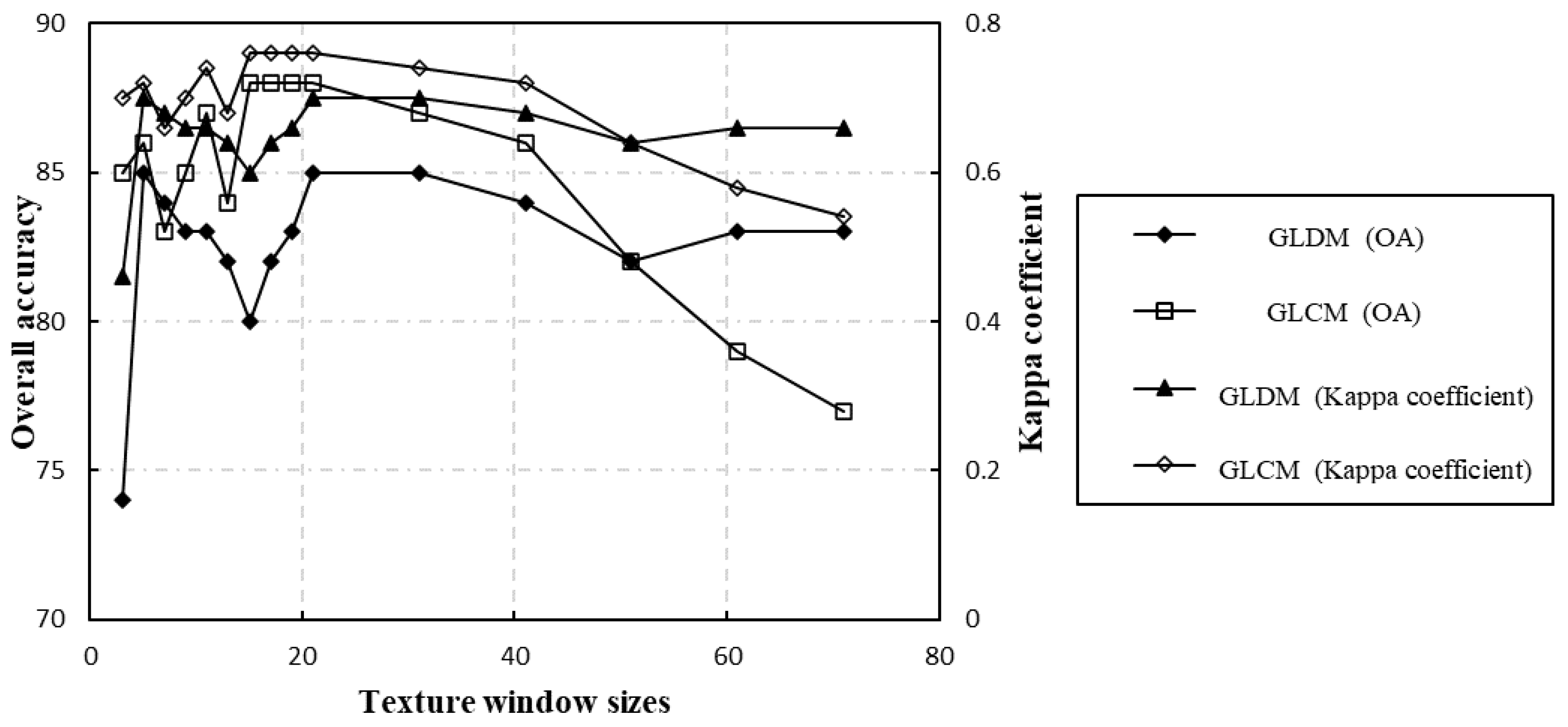
56]. However, in this study, we found several texture window sizes with the highest accuracy when we used these indexes (
Figure 3). Generally, higher separability between the image features of two objects indicates a greater likelihood that they will be correctly classified. Consequently, based on the Kappa coefficient and OA, we utilized DI to analyze the optimal window sizes for the GLCM and GLDM textures (which were 21 and 17, respectively) to ensure the suitability of the window size. Because the spatial resolution of the UAV image is 7.5 cm, the actual areas of the texture features at the 17 and 21 window scales are 1.59 m
2 and 2.40 m
2, respectively. The former area (1.59 m
2) is close to the measured area (1.55 m
2) of single lodging maize in the orthographic multispectral image, while the latter (2.40 m
2) is quite different from the measured area (0.17 m
2) of single nonlodging maize, but it is close to the area of small-scale maize lodging. Therefore, the texture measures of a single lodging plant and a small-scale lodging area are well described under the optimal window size in this study, which avoids missing maize lodging areas.
As shown in
Figure 3, the accuracy of the GLDM texture measures increases sharply at window scales from 3 to 5 and decreases slowly at window scales from 5 to 7. This result occurs principally because the actual area of the 5 window size in the UAV image (0.14 m
2) is the closest to the measured area of single nonlodging maize compared to the areas at window sizes of 3 and 7. In this way, the GLDM texture with a window size of 5 maintains good separability between lodging and nonlodging maize. In addition, the randomness of sample selection may cause large fluctuations in the accuracy curve.
4.2. Generalizability of the AIC Method in Selecting Lodging Features
As the fundamental method of identifying the feature selection of lodging crops, the index method [
7,
15,
16] is unable to directly determine the optimal number of features. Conversely, the AIC method not only can quickly determine the optimal number of features but also has higher recognition accuracy (
Table 5,
Table 6 and
Table 7). The AIC method maintains high recognition accuracy (
Table 7) even in two maize regions in different growth stages; therefore, it also achieves good generalizability. Due to the complexity of the plot environment in the study area, we used multiple features to identify maize lodging. Nevertheless, the screening criterion used in the index method—which determines whether a single feature is suitable for lodging identification—does not consider the interaction between multiple features. In contrast, the AIC method establishes the relationships between multiple features using a logistic regression model, thereby enhancing the complementarity of selected features. Therefore, the accuracy of the AIC method is generally higher than that of the index method.
At present, scholars use UAV images to identify lodging crops mainly during the vigorous growth period of crops [
12,
57]; thus, the method for selecting lodging recognition features is greatly affected by other crop growth periods and field environments. In contrast, the study area in this study includes both lodging and nonlodging maize in different growth stages. Therefore, the AIC method can be extensively applied to various situations (different varieties, growth periods, leaf colors, etc.) In summary, the AIC screening method is more effective for identifying lodging maize in complex field environments or in plots with different fertilization rates, varieties, maturity dates, and sowing periods.
4.3. Suitability of Canopy Structure Feature for Extraction of Maize Lodging in Complex Environments
Texture, spectral, and color features extracted from remote sensing images are frequently used as effective factors to estimate crop lodging [
3,
11,
13]. In addition to these characteristics, CSFs were calculated according to CHM. Among the SFS, the CS had the highest accuracy; its average Kappa coefficient and overall accuracy were 0.74 and 87.00%, respectively (
Table 9). Lodging maize in the study area is dominated by Lodging R. The differences in CSFs between Lodging R and No-Lodging LR are significant, but their leaf color and spectral reflectance are similar. Therefore, compared with the texture and spectral features, the CSFs make it easier to identify lodging maize. Although both spectral and texture features are effective for assessing crop lodging [
1], different crop types and growing periods still affect the recognition accuracy and stability of the features.
The MFS had the largest difference in the average Kappa coefficient and OA between Texture + Spectral and Texture + CS + Spectral: 0.19 and 9.33% (
Table 9), respectively. These results further indicated that CSF is the primary factor that can improve the accuracy of maize lodging detection. Although CSF was able to directly reflect the height difference between lodging and nonlodging maize, their heights were sometimes similar due to the spatial heterogeneity of soil and terrain. Consequently, to compensate for this defect of CSF and accurately distinguish lodging and nonlodging areas, CSF must be combined with other image features such as texture and multispectral reflectance.
4.4. Comparison of Optimal Classification Results under Different Classification Algorithms
Among MLC, RFC, and BLRC, the most accurate respective feature sets were Texture + CS + Spectral, Texture + CS + Spectral, and CS (
Table 9). Based on the same feature set, the accuracy of MLC was higher than that of RFC because MLC is more suitable for classifying low-dimensional data than RFC. The BLRC algorithm is very suitable for addressing the issue of binary classification in imagery used for object detection. However, both the lodging and nonlodging maize involved in this study can have multiple forms (
Figure 2). Therefore, although high-precision lodging recognition results can be obtained by utilizing BLRC combined with CSF, the results were still lower than those of MLC.
4.5. Comparison of Traditional and New Methods for Crop Lodging Identification
Compared with the traditional crop lodging recognition methods, the new method proposed in this study describes the difference between lodging and nonlodging crops from more aspects—because it extracts more image features. In addition, the optimal and unique texture window size that fully expresses the morphological characteristics of crop lodging in the image was determined, thus improving the probability of successful crop lodging identification. However, extracting a large number of image features requires more computation and consumes more time. In this paper, the AIC method, which can obtain the optimal features more quickly and directly, was applied to feature selection while maintaining a strong relationship between features. Therefore, the AIC method is more suitable for identifying crop lodging using multiple image features. In contrast, the traditional crop lodging identification methods are based on homogeneous field environments in which the crops are all in the same growth period, and their growth conditions are similar. Nevertheless, different maize growth periods and growth statuses existed in the study area. Therefore, compared with traditional methods, the new crop lodging identification method is better able to identify crop lodging in a complex field environment, and it has stronger universality.
4.6. Analysis of Optimal Feature Set under Different Data Availability
In practice, the recognition of lodging maize must consider both data availability and the accuracy of the results. Therefore, based on the reference results in
Table 9, we analyzed the optimal feature set of maize lodging extraction features using the AIC method under different data conditions. Compared with multispectral images, the CHM acquisition requires more manpower, material resources, and time. Therefore, we were able to employ only the texture and spectral features derived from the multispectral imagery to save data collection costs. Based on this approach, the optimal feature set and classification algorithm were Texture + Spectral and MLC, respectively. The Texture + Spectral feature set is suitable for situations in which the color discrepancy between leaves and stems is significant. In the absence of multispectral images, the optimal feature set and classification method were CS and BLRC, respectively. The CS feature set is suitable when there are large differences in lodging and nonlodging maize. When both CHM and multispectral imagery can be obtained, the most suitable feature set and classification method were Texture + CS + Spectral and MLC for lodging detection. In a complex field environment, the Texture + CS + Spectral feature set can accurately discriminate between lodging and nonlodging areas, but the time and economic costs of this approach are high; therefore, it is not practical for rapid monitoring of crop lodging.
4.7. Shortcoming and Prospects of Research
Although the new crop lodging identification method proposed in this paper has good stability and high accuracy in complicated field conditions, its universality at the regional scale requires further exploration and verification. When applied to satellite images, the accuracy of the new method may decrease due to the following factors: (1) the spatial resolution and image quality of satellite images are lower than those of UAV images; (2) satellite images include more non-vegetation objects, including houses, other lodgings, and lakes; and (3) detailed CSF cannot be obtained from satellite images.
Compared with the multispectral camera, the three-dimensional cloud points obtained by LiDAR have higher density and accuracy, which would improve the accuracy of CSF and lodging identification. In the future, we could use UAVs equipped with hyperspectral sensors to obtain hyperspectral images with abundant spectral information, allowing more vegetation index features to be constructed. Moreover, the relationship between background factors and lodging crops should be fully analyzed to determine the main factors that cause lodging.
5. Summary and Conclusions
In this study, the texture measures, spectral features, and CSFs of maize in the study area were extracted from UAV-acquired multispectral images, and the optimal texture window size was determined for lodging identification. Based on the above image features, the performance of the two screening methods was analyzed under the MLC, RFC, and BLRC algorithms. The main outcomes were as follows. (1) The optimal texture window sizes of GLCM and GLDM texture were 17 and 21, respectively, as determined by the Kappa coefficient, OA and DI. The area of the former size (1.59 m2) was close to the measured area (1.55 m2) of single lodging maize in the orthographic multispectral image, while the area of the latter (2.40 m2) was quite different from the measured area (0.17 m2) of single nonlodging maize but quite close to the maize lodging area with a small size. (2) Compared with the index method, the AIC method had a higher Kappa coefficient and OA; thus, this method is more suitable for screening lodging recognition features. In a complex field environment, the AIC method has strong generalizability when using MFS. (3) The accuracy of the detection result based on the Texture + CS + Spectral and AIC methods was the highest compared with the other feature sets, and CSF played an important role in lodging recognition. The Texture + CS + Spectral features, screened by the AIC method and classified by the MLC, achieved the highest lodging recognition accuracy: the Kappa coefficient and OA of this combination were 0.92% and 96.00%, respectively. (4) The new crop lodging identification method proposed in this paper can adapt to complex field environments, especially in crop fields with different growth periods. (5) In practice, researchers can obtain the CSF of maize first and then combine it with the BLRC algorithm to achieve fast extraction of crop lodging areas.

 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}