A Deep Learning Approach to the Detection of Gossans in the Canadian Arctic

 ,
,
Abstract

1. Introduction
2. Materials and Methods
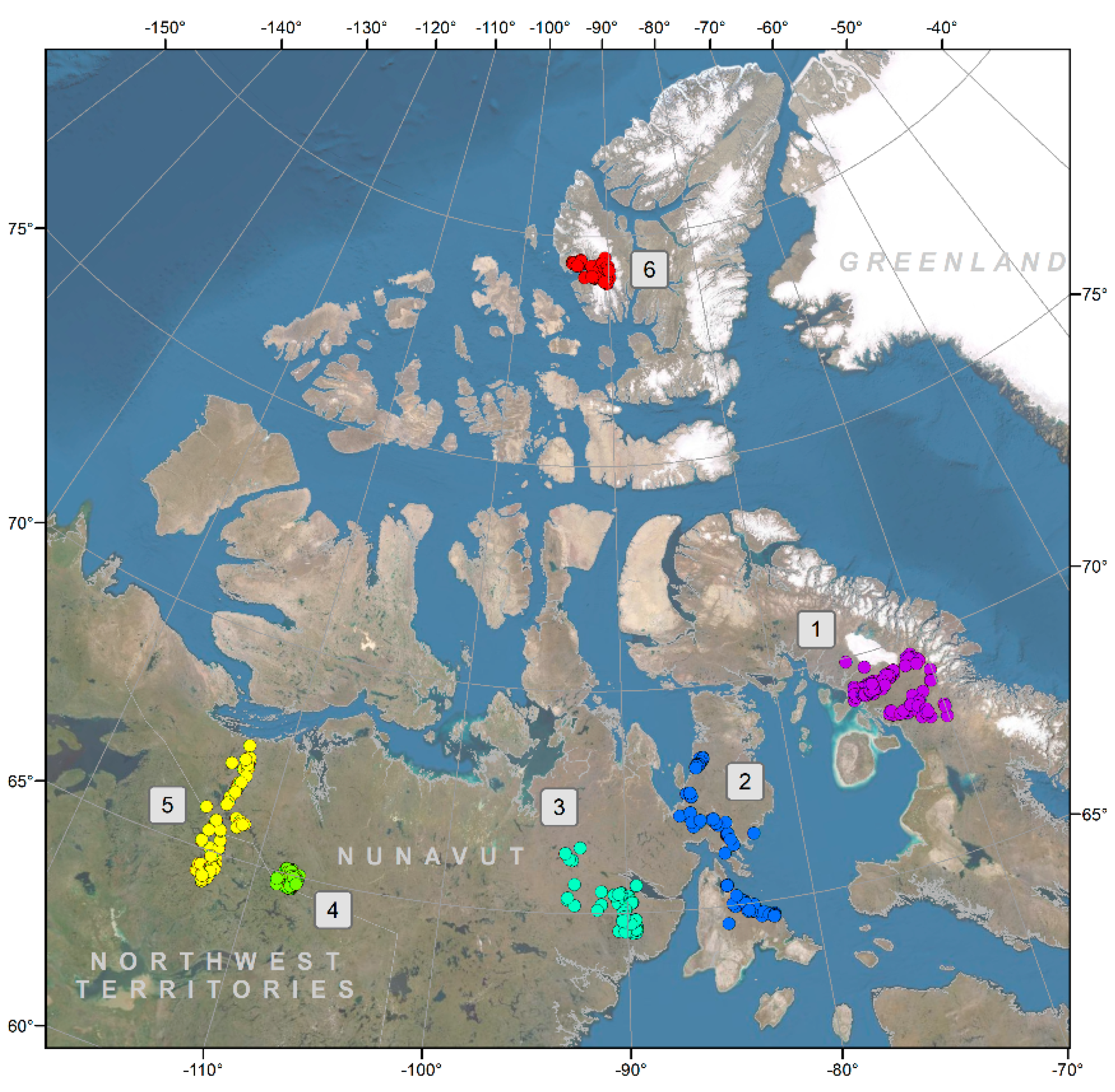
2.1. Region of Study
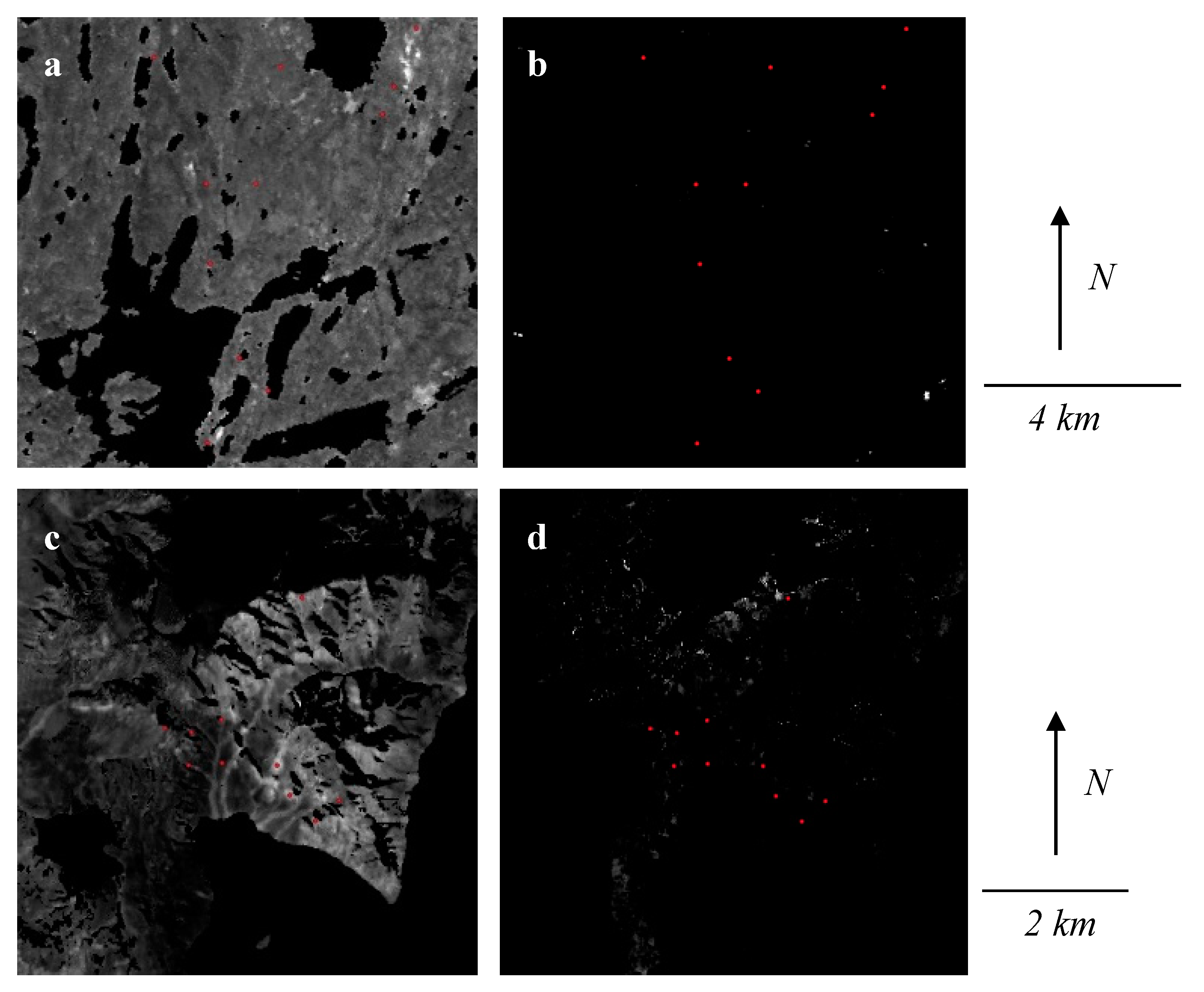
2.2. Satellite Imagery
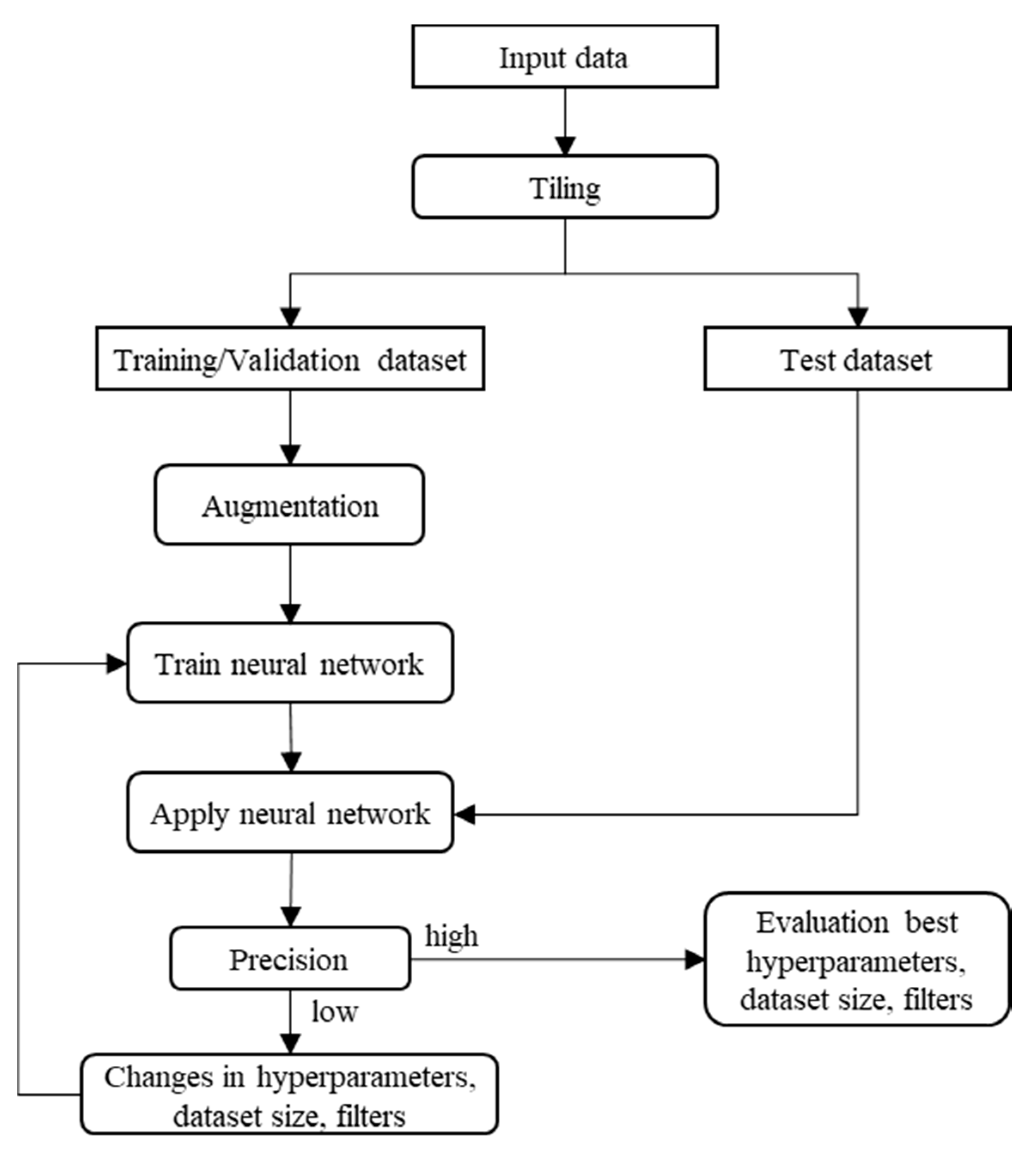
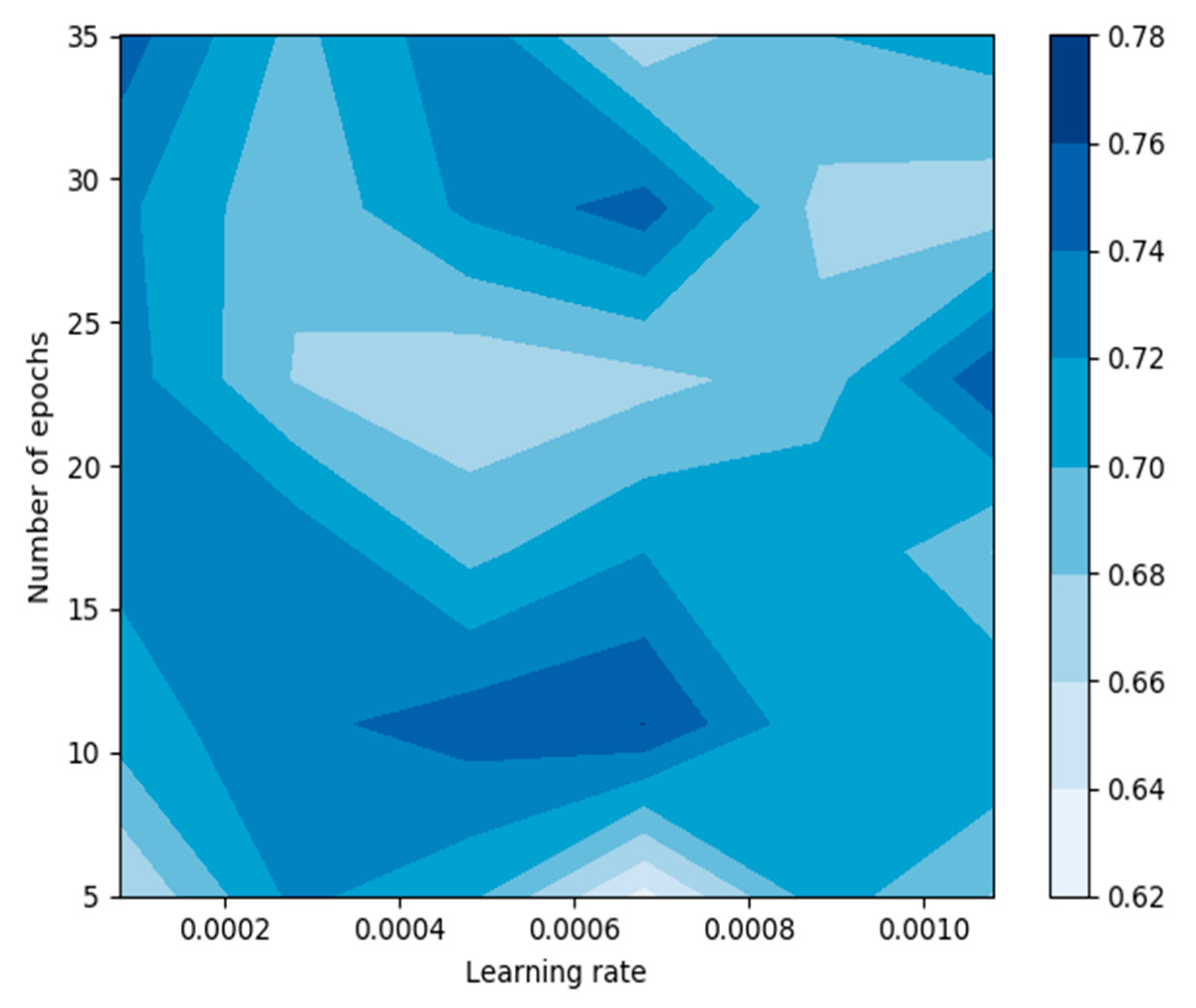
2.3. Methodology
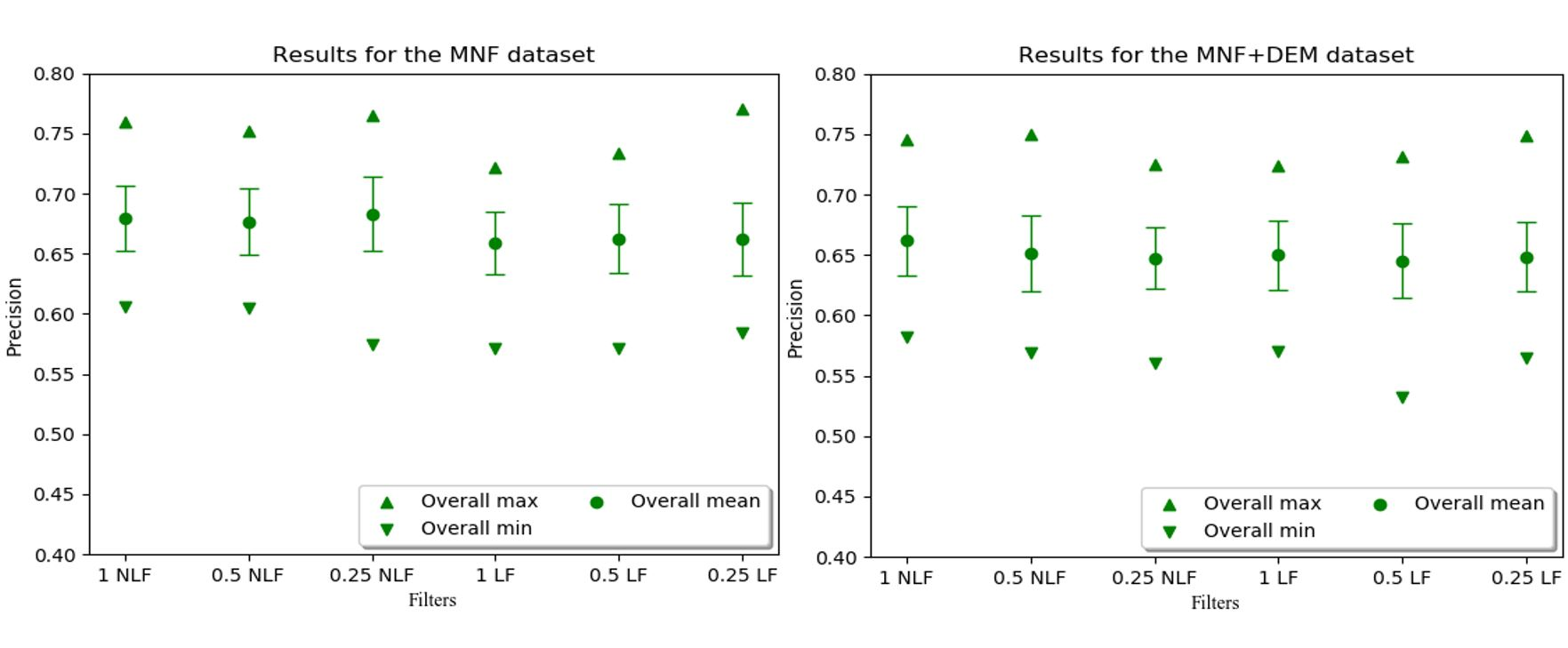
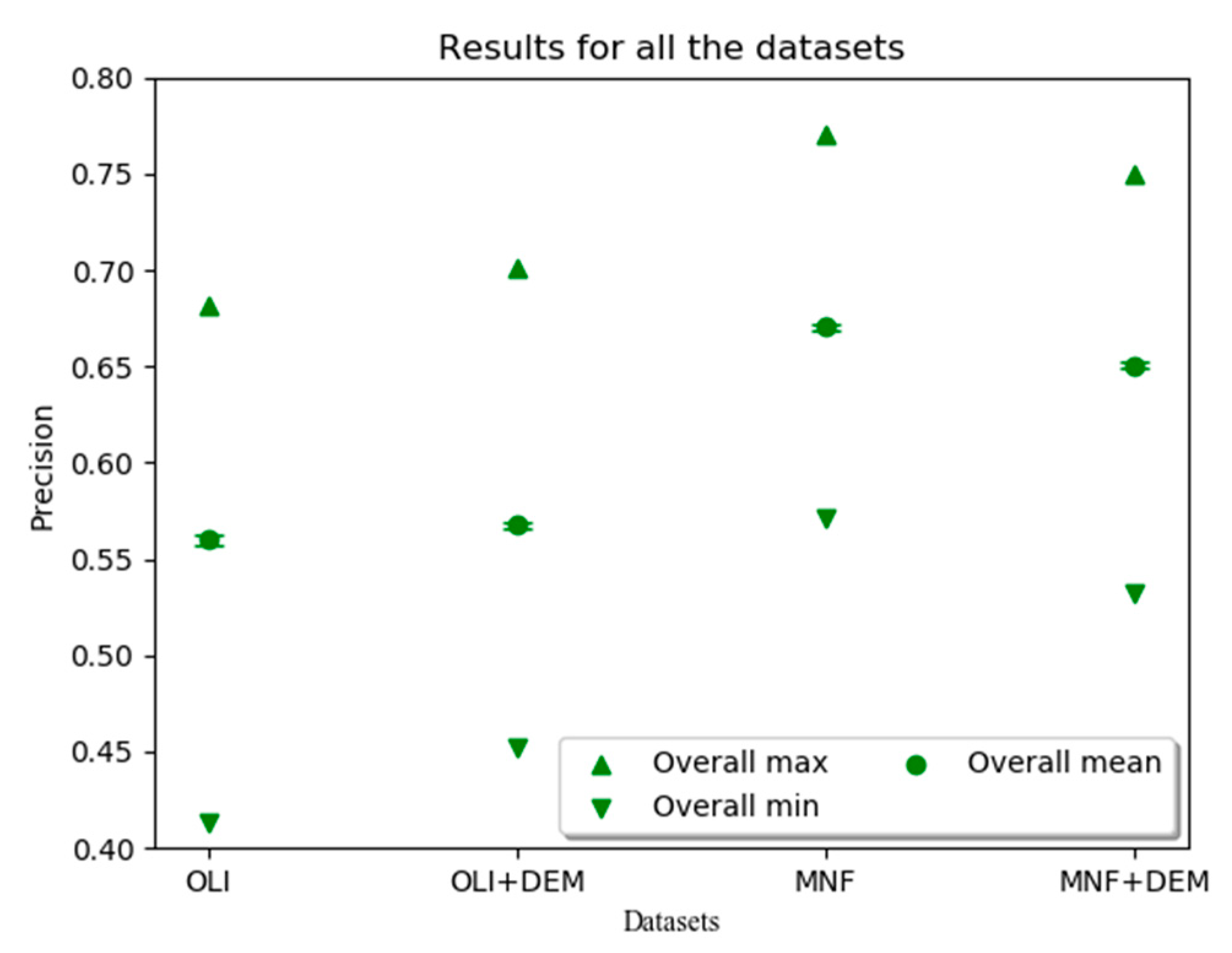
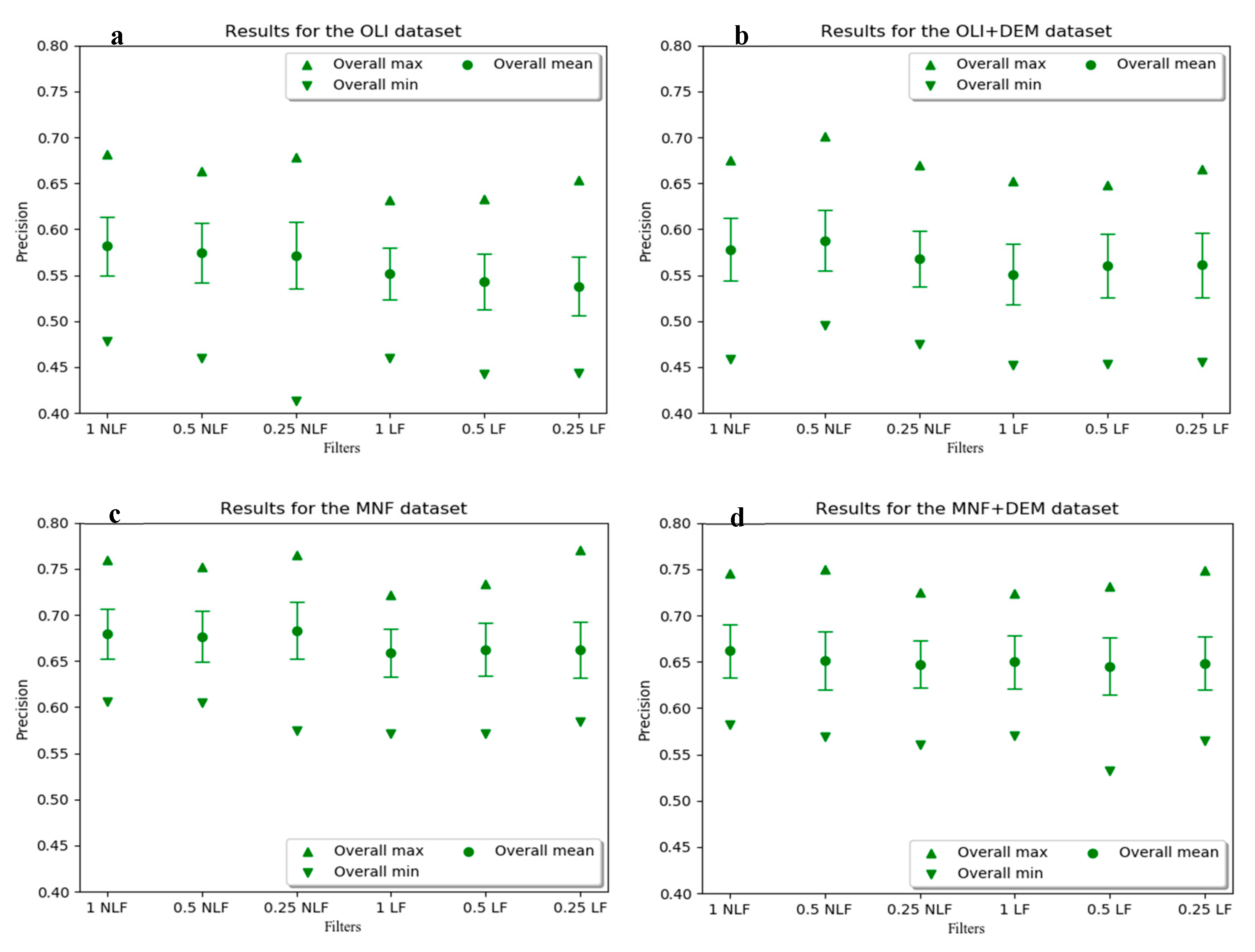
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Velasco, F.; Herrero, J.M.; Suárez, S.; Yusta, I.; Alvaro, A.; Tornos, F. Supergene features and evolution of gossans capping massive sulphide deposits in the Iberian Pyrite Belt. Ore Geol. Rev. 2013, 53, 181–203. [Google Scholar] [CrossRef]
- West, L.; McGown, D.J.; Onstott, T.C.; Morris, R.V.; Suchecki, P.; Pratt, L.M. High Lake gossan deposit: An Arctic analogue for ancient Martian surficial processes? Planet. Space Sci. 2009, 57, 1302–1311. [Google Scholar] [CrossRef]
- Harris, J.R.; Williamson, M.-C.; Percival, J.B.; Behnia, P.; Macleod, R. Detecting and Mapping Gossans Using Remotely-Sensed Data. In Environmental and Economic Significance of Gossans; Geological Survey of Canada: Ottawa, ON, Canada, 2015; p. 7718. [Google Scholar]
- Essalhi, M.; Sizaret, S.; Barbanson, L.; Chen, Y.; Lagroix, F.; Demory, F.; Nieto, J.M.; Sáez, R.; Capitán, M.Á. A case study of the internal structures of gossans and weathering processes in the Iberian Pyrite Belt using magnetic fabrics and paleomagnetic dating. Min. Depos. 2011, 46, 981–999. [Google Scholar] [CrossRef]
- Hunt, J.; Lottermoser, B.G.; Parbhakar-Fox, A.; Van Veen, E.; Goemann, K. Precious metals in gossanous waste rocks from the Iberian Pyrite Belt. Miner. Eng. 2016, 87, 45–53. [Google Scholar] [CrossRef]
- Peterson, R.C.; Williamson, M.-C.; Rainbird, R.H. Gossan Hill, Victoria Island, Northwest Territories: An analogue for mine waste reactions within permafrost and implication for the subsurface mineralogy of Mars. Earth Planet. Sci. Lett. 2014, 400, 88–93. [Google Scholar] [CrossRef]
- Williamson, M.-C. Environmental and Economic Significance of Gossans; Comission Géologique du Canada: Ottawa, ON, Canada, 2015; p. 100. [CrossRef]
- Cruz, C.; Noronha, F.; Santos, P.; Mortensen, J.K.; Lima, A. Supergene gold enrichment in the Castromil-Serra da Quinta gold deposit, NW Portugal. Mineral. Mag. 2018, 82, S307–S320. [Google Scholar] [CrossRef]
- Valente, T.; Rivera, M.J.; Almeida, S.F.P.; Delgado, C.; Gomes, P.; Grande, J.A.; de la Torre, M.L.; Santisteban, M. Characterization of water reservoirs affected by acid mine drainage: Geochemical, mineralogical, and biological (diatoms) properties of the water. Environ. Sci. Pollut. Res. 2016, 23, 6002–6011. [Google Scholar] [CrossRef] [PubMed]
- Santos, E.S.; Abreu, M.M.; Macías, F.; de Varennes, A. Chemical quality of leachates and enzymatic activities in Technosols with gossan and sulfide wastes from the São Domingos mine. J. Soils Sediments 2016, 16, 1366–1382. [Google Scholar] [CrossRef]
- Santos, E.S.; Abreu, M.M.; Macías, F.; Magalhães, M.C.F. Potential environmental impact of technosols composed of gossan and sulfide-rich wastes from São Domingos mine: Assay of simulated leaching. J. Soils Sediments 2017, 17, 1369–1383. [Google Scholar] [CrossRef]
- Santos, E.S.; Abreu, M.M.; Macías, F. Rehabilitation of mining areas through integrated biotechnological approach: Technosols derived from organic/inorganic wastes and autochthonous plant development. Chemosphere 2019, 224, 765–775. [Google Scholar] [CrossRef]
- Shuster, J.; Reith, F.; Izawa, M.; Flemming, R.; Banerjee, N.; Southam, G. Biogeochemical Cycling of Silver in Acidic, Weathering Environments. Minerals 2017, 7, 218. [Google Scholar] [CrossRef]
- Hedrich, S.; Schippers, A. Distribution of Acidophilic Microorganisms in Natural and Man-made Acidic Environments. Curr. Issues Mol. Biol. 2020, 25–48. [Google Scholar] [CrossRef]
- Floyd, M.A.M.; Williams, A.J.; Grubisic, A.; Emerson, D. Metabolic Processes Preserved as Biosignatures in Iron-Oxidizing Microorganisms: Implications for Biosignature Detection on Mars. Astrobiology 2019, 19, 40–52. [Google Scholar] [CrossRef] [PubMed]
- Clark, R.N. Spectroscopy of Rocks and Minerals, and Principles of Spectroscopy. In Manual of Remote Sensing; Remote Sensing for the Earth Sciences; Andrew, N.R., Ed.; John Wiley and Sons: New York, NY, USA, 1999; Volume 3, pp. 3–58. [Google Scholar]
- Laakso, K.; Rivard, B.; Rogge, D. Enhanced detection of gossans using hyperspectral data: Example from the Cape Smith Belt of northern Quebec, Canada. ISPRS J. Photogramm. Remote Sens. 2016, 114, 137–150. [Google Scholar] [CrossRef]
- Beiranvand Pour, A.; S Park, T.Y.; Park, Y.; Hong, J.K.; M Muslim, A.; Läufer, A.; Crispini, L.; Pradhan, B.; Zoheir, B.; Rahmani, O.; et al. Landsat-8, Advanced Spaceborne Thermal Emission and Reflection Radiometer, and WorldView-3 Multispectral Satellite Imagery for Prospecting Copper-Gold Mineralization in the Northeastern Inglefield Mobile Belt (IMB), Northwest Greenland. Remote Sens. 2019, 11, 2430. [Google Scholar] [CrossRef]
- Abrams, M.J.; Ashley, R.P.; Rowan, L.C.; Goetz, A.F.H.; Kahle, A.B. Mapping of hydrothermal alteration in the Cuprite mining district, Nevada, using aircraft scanner images for the spectral region 0.46 to 2.36 µm. Geology 1977, 5, 713–718. [Google Scholar] [CrossRef]
- Abrams, M.J.; Brown, D.; Lepley, L.; Sadowski, R. Remote sensing for porphyry copper deposits in southern Arizona. Econ. Geol. 1983, 78, 591–604. [Google Scholar] [CrossRef]
- Gahlan, H.; Ghrefat, H. Detection of Gossan Zones in Arid Regions Using Landsat 8 OLI Data: Implication for Mineral Exploration in the Eastern Arabian Shield, Saudi Arabia. Nat. Resour. Res. 2018, 27, 109–124. [Google Scholar] [CrossRef]
- Mielke, C.; Muedi, T.; Papenfuss, A.; Boesche, N.K.; Rogass, C.; Gauert, C.D.K.; Altenberger, U.; de Wit, M.J. Multi- and hyperspectral spaceborne remote sensing of the Aggeneys base metal sulphide mineral deposit sites in the Lower Orange River region, South Africa. S. Afr. J. Geol. 2016, 119, 63–76. [Google Scholar] [CrossRef]
- Mielke, C.; Boesche, N.; Rogass, C.; Kaufmann, H.; Gauert, C.; de Wit, M. Spaceborne Mine Waste Mineralogy Monitoring in South Africa, Applications for Modern Push-Broom Missions: Hyperion/OLI and EnMAP/Sentinel-2. Remote Sens. 2014, 6, 6790–6816. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Lin, M.; Chen, Q.; Yan, S. Network in Network. Available online: https://arxiv.org/pdf/1312.4400.pdf (accessed on 4 March 2014).
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Dai, J.; He, K.; Sun, J. Instance-Aware Semantic Segmentation via Multi-task Network Cascades. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3150–3158. [Google Scholar]
- Cheng, G.; Yang, C.; Yao, X.; Guo, L.; Han, J. When Deep Learning Meets Metric Learning: Remote Sensing Image Scene Classification via Learning Discriminative CNNs. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2811–2821. [Google Scholar] [CrossRef]
- Liu, Q.; Basu, S.; Ganguly, S.; Mukhopadhyay, S.; DiBiano, R.; Karki, M.; Nemani, R. DeepSat V2: Feature augmented convolutional neural nets for satellite image classification. Remote Sens. Lett. 2020, 11, 156–165. [Google Scholar] [CrossRef]
- Ducart, D.F.; Silva, A.M.; Toledo, C.L.B.; Assis, L.M. de Mapping iron oxides with Landsat-8/OLI and EO-1/Hyperion imagery from the Serra Norte iron deposits in the Carajás Mineral Province, Brazil. Braz. J. Geol. 2016, 46, 331–349. [Google Scholar] [CrossRef]
- Li, S.; Dragicevic, S.; Castro, F.A.; Sester, M.; Winter, S.; Coltekin, A.; Pettit, C.; Jiang, B.; Haworth, J.; Stein, A.; et al. Geospatial big data handling theory and methods: A review and research challenges. ISPRS J. Photogramm. Remote Sens. 2016, 115, 119–133. [Google Scholar] [CrossRef]
- GEM: Geo-mapping for Energy and Minerals. Available online: https://www.nrcan.gc.ca/earth-sciences/resources/federal-programs/geomapping-energy-minerals/18215 (accessed on 22 April 2019).
- Harrison, J.; St-Onge, M.; Petrov, O.; Strelnikov, S.; Lopatin, B.; Wilson, F.; Tella, S.; Paul, D.; Lynds, T.; Shokalsky, S.; et al. Geological Map of the Arctic; Geological Survey of Canada: Ottawa, ON, Canada, 2011. [CrossRef]
- Zanter, K. Landsat 8 Surface Reflectance Code (LASRC) Product Guide; USGS: Sioux Falls, SD, USA, 2019; p. 39.
- Canadian Digital Elevation Model, 1945–2011. Available online: https://open.canada.ca/data/en/dataset/7f245e4d-76c2-4caa-951a-45d1d2051333 (accessed on 29 January 2020).
- Bottou, L. Large-Scale Machine Learning with Stochastic Gradient Descent. In Proceedings of the COMPSTAT’2010, Paris, France, 22–27 August 2010; Lechevallier, Y., Saporta, G., Eds.; Physica-Verlag HD: Heidelberg, Germany; pp. 177–186. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A Simple Way to Prevent Neural Networks from Overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Adivarekar, B. Simple Keras CNN with 95.3% Accuracy. Available online: https://www.kaggle.com/bhumitadivarekar/simple-keras-cnn-with-95-13-accuracy (accessed on 15 January 2020).
- Green, A.A.; Berman, M.; Switzer, P.; Craig, M.D. A transformation for ordering multispectral data in terms of image quality with implications for noise removal. IEEE Trans. Geosci. Remote Sens. 1988, 26, 65–74. [Google Scholar] [CrossRef]
- Hutchison, D.; Kanade, T.; Kittler, J.; Kleinberg, J.M.; Mattern, F.; Mitchell, J.C.; Naor, M.; Nierstrasz, O.; Pandu Rangan, C.; Steffen, B.; et al. Learning to Detect Roads in High-Resolution Aerial Images. In Computer Vision – ECCV 2010; Daniilidis, K., Maragos, P., Paragios, N., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6316, pp. 210–223. ISBN 978-3-642-15566-6. [Google Scholar]
- Basu, S.; Ganguly, S.; Mukhopadhyay, S.; DiBiano, R.; Karki, M.; Nemani, R. DeepSat: A learning framework for satellite imagery. In Proceedings of the 23rd SIGSPATIAL International Conference on Advances in Geographic Information Systems - GIS ’15, Seattle, WA, USA, 3–6 November 2015; ACM Press: New York, NY, USA; pp. 1–10. [Google Scholar]
- Perez, L.; Wang, J. The Effectiveness of Data Augmentation in Image Classification using Deep Learning. Available online: https://arxiv.org/pdf/1712.04621.pdf (accessed on 13 December 2017).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spectral Range | Spatial Resolution | |
|---|---|---|
| Band 1 Costal aerosol | 0.43–0.45 µm | 30 m |
| Band 2 Blue | 0.450–0.51 µm | 30 m |
| Band 3 Green | 0.53–0.59 µm | 30 m |
| Band 4 Red | 0.64–0.67 µm | 30 m |
| Band 5 Near-Infrared | 0.85–0.88 µm | 30 m |
| Band 6 SWIR 1 | 1.57–1.65 µm | 30 m |
| Band 7 SWIR 2 | 2.11–2.29 µm | 30 m |
| Band 8 Panchromatic | 0.50–0.68 µm | 15 m |
| Band 9 Cirrus | 1.36–1.38 µm | 30 m |
| Min Values Tested | Kept Values | Max Values Tested | |
|---|---|---|---|
| Number of epochs | 1 | 5–35 | 500 |
| Learning rate | 10−5 | 10−4–10−3 | 10−1 |
| Batch size | 16 | 64 | 256 |
| Dropout probability | 0.1 | 0.4–0.7 | 0.9 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Clabaut, É.; Lemelin, M.; Germain, M.; Williamson, M.-C.; Brassard, É. A Deep Learning Approach to the Detection of Gossans in the Canadian Arctic. Remote Sens. 2020, 12, 3123. https://doi.org/10.3390/rs12193123
Clabaut É, Lemelin M, Germain M, Williamson M-C, Brassard É. A Deep Learning Approach to the Detection of Gossans in the Canadian Arctic. Remote Sensing. 2020; 12(19):3123. https://doi.org/10.3390/rs12193123
Chicago/Turabian StyleClabaut, Étienne, Myriam Lemelin, Mickaël Germain, Marie-Claude Williamson, and Éloïse Brassard. 2020. "A Deep Learning Approach to the Detection of Gossans in the Canadian Arctic" Remote Sensing 12, no. 19: 3123. https://doi.org/10.3390/rs12193123
APA StyleClabaut, É., Lemelin, M., Germain, M., Williamson, M.-C., & Brassard, É. (2020). A Deep Learning Approach to the Detection of Gossans in the Canadian Arctic. Remote Sensing, 12(19), 3123. https://doi.org/10.3390/rs12193123