1. Introduction
Forest covers approximately 30 percent of the global land area and plays an essential role in the natural circulation of carbon and mitigation of climate change. Many remote sensing instruments, including active and passive sensors, such as optical sensors, synthetic aperture radar (SAR), lidar, and microwave radar, are capable of exploring spatially continuous properties of forest structure over large areas in a rapid manner [
1,
2,
3,
4]. Due to its all-weather imaging capability, satellite SAR is more feasible for wide-area mapping in a much efficient manner. It provides continuous forest mapping and updating on a global scale, in addition, SAR can provide significantly higher sensitivity to the vertical forest elements due to the ability to penetrate through the vegetation layer and interact with forest vertical structure components comparing with other optical passive/active remote sensing techniques. SAR tomography has emerged in the last years as a vital tool for the investigation of forested areas by its capability to resolve the vertical structure of the target [
5,
6,
7]. They have become significant instruments in the investigation of the vertical canopy structure.
Stand profiles that present tree height and density in the forest using helicopter-borne frequency-modulated continuous waveform (FMCW) microwave radar were also reported by [
4,
8,
9]. A light-weighted Ku-band (FM-CW) profiling radar, named Tomoradar, was developed by the Finnish Geospatial Research Institute (FGI) to collect full polarization backscattered signal from the boreal forest and investigate the vertical canopy structure information. Tomoradar can provide four linear polarization measuring capabilities in Ku band based bistatic configuration with 15 cm range solution, to improve the understanding of the radar backscatter response for forestry mapping and inventories. Subsequent studies on forest inventory, especially for vertical forest structure using FMCW radar data have been conducted in the past few years [
10,
11,
12,
13,
14].
The principle of FMCW radar is straightforward: an FMCW radar transmits a frequency-modulated (FM) signal (normally linear FM) with a given bandwidth (BW). It receives an attenuated copy of the transmitted signal representing the backscatters from a target. By multiplying the transmitted signal with the received signal, an intermediate frequency (IF) difference signal containing a beat frequency is generated, and the beat frequency is proportional to the range. The IF signal is then amplified and digitalized by an oscilloscope device [
9]. Due to the linear modulation mode, the beat frequency is directly proportional to the two-way range. The BW (a few gigahertzes) of an FMCW system results in a theoretical range resolution even close to pulsed lidar [
9,
15]. FMCW radar offers another advantage by providing accurate high range resolution measurements without requiring a high sample rate analogue-to-digital converter since the range measurement is achieved from frequency domain by fast Fourier transform (FFT) process but not in the time domain. Due to the combination of excellent range resolution and good penetration in the operating radio frequency, the FMCW radar technique is extensively utilized by various research areas ranging from forest [
16,
17], snow, and ice [
18], to human–computer interactions [
19,
20].
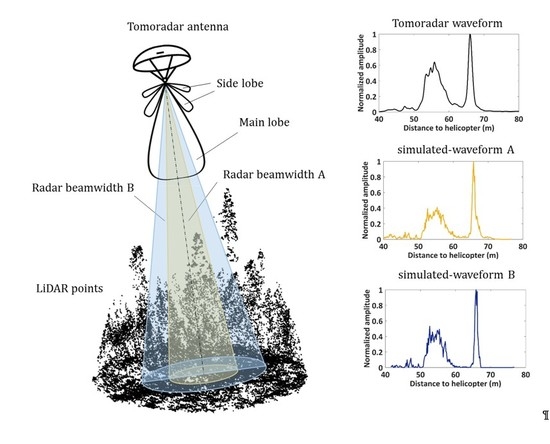
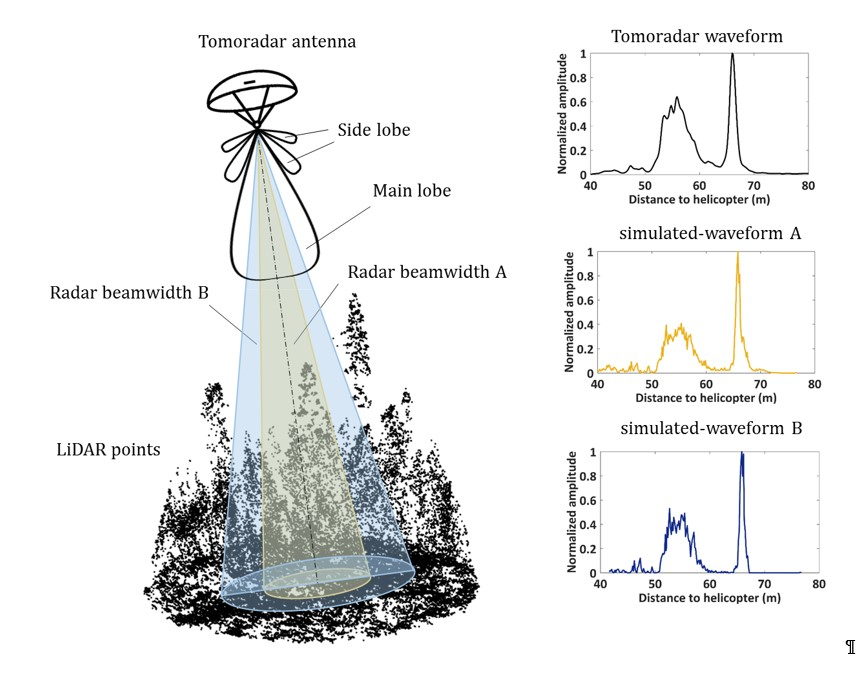
The FMCW radars transmit microwave radiations within a cone into the vegetation and receive backscattered energy from the surface of the plant. The cone is usually defined with a typical antenna beamwidth represented by the angular separation between two half-power (−3 dB) points of the main lobe [
21]. Such half-power beamwidth (HPBW) is usually treated as the beamwidth during the design of a radar antenna for remote sensing. Meanwhile, the footprint size is also traditionally described to be the illuminated area on the ground within the field of view subtended by the HPBW, which is an essential conception to better understanding what the radar can observe and measure [
22].
However, it is probably incorrect to choose HPBW as the beamwidth. The microwave energies outside the HPBW might also backscatter off the targets nearby and be collected by the radar receiver, causing the undesired signals that may conceal weaker returns from the more distant targets in the radar HPBW. The potential impact of backscattered energy outside radar HPBW is dependent on the relative strength of an antenna pattern and the scattering property of the measured targets beyond HPBW. These unwanted radiations in unexpected directions could originate from outside HPBW in the main lobe, even in the side lobe, which would change the distributions of backscattered signal and produce some unpredictable errors for the retrieval results. For example, Li found the antenna side lobe effect on the atmospheric temperature and water vapor density in ground-based microwave remote sensing of the atmosphere [
23]. Kwok analyzed the effects of radar side lobes on snow depth retrievals from operation IceBridge [
18] thoroughly. Feng and Chen found that the microwave radiations outside HPBW created an indecipherable impact on the accuracy of the canopy top [
12]. These investigations demonstrate that it is unsuitable to only depend on HBPW when we design the beamwidth of the radar antenna and determine the footprint size or the region scope of validation data such as lidar data and the ground truth.
Therefore, it is necessary to resolve such actual radar beamwidth, defined as an effective beamwidth in this paper, to provide a piece of evidence in the design of radar antenna and the determination of footprint size. Nevertheless, there is no deterministic answer for ascertaining the effective beamwidth due to the missing of synergistic data and sensors. Until recently, the availability of the data of both radar and lidar on the same forest targets as close as possible on a single airborne platform under identical conditions (for example, observation angle, operation height, and aircraft vibration) offers an excellent opportunity to scientists to try to tackle this problem.
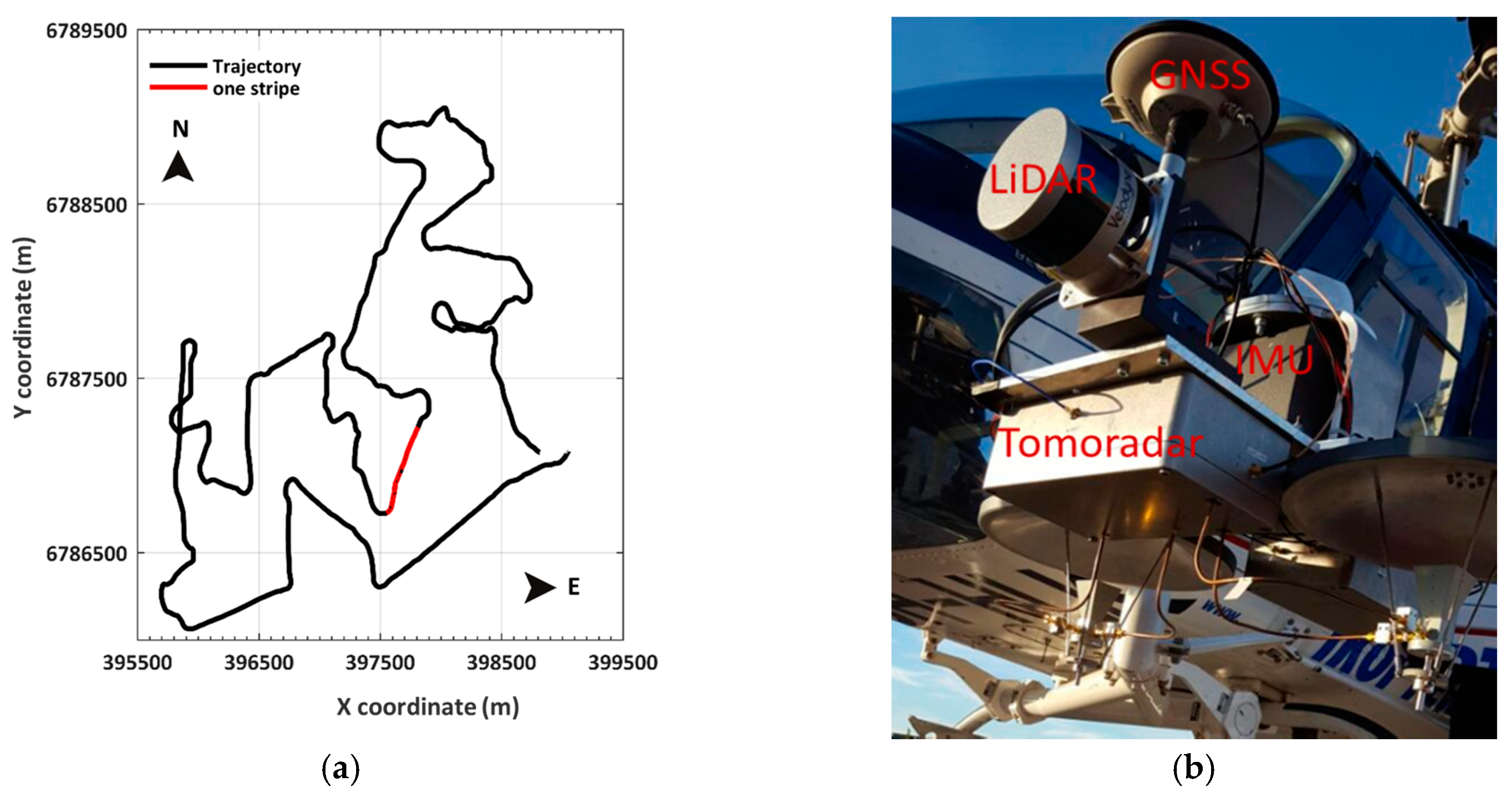
The coincident lidar data are simultaneously collected by a Velodyne VLP-16 lidar on the identical platform with Tomoradar. The major difference between Tomoradar and other FMCW radars, for example, radar systems for ice and snow application, is that the HPBW is very narrow, more specific, 6 degrees. The half-power beamwidth for snow investigation FMCM radar was tens of degrees, for example, 45° in [
15]. It is well known that significant leakage will scatter from nearby environmental reflections even if antenna components are perfect for FMCW radar. Normally, higher than 100 dB leakage rejection is anticipated to achieve satisfactory performance. However, in Tomoradar, the vertical forest structure is more complex relative to the topography of snow coverage or ice sheet. However, the HPBW is considerably narrower, and the employed antenna is still a trade-off between theoretical investigation and practical product. Thus, in this research, we utilize the unique opportunity to investigate the synergic data both from radar and lidar for the following specific technical issues: How to determine the effective beamwidth of the profile radar for forestry inventory research rather than directly use HPBW noted by the datasheet, and to understand the microwave propagation within forest better. In other words, this research tries to tackle how the significant leakage scattered from the nearby forest environment outside of the cone defined by the HPBW will affect the final measurement.
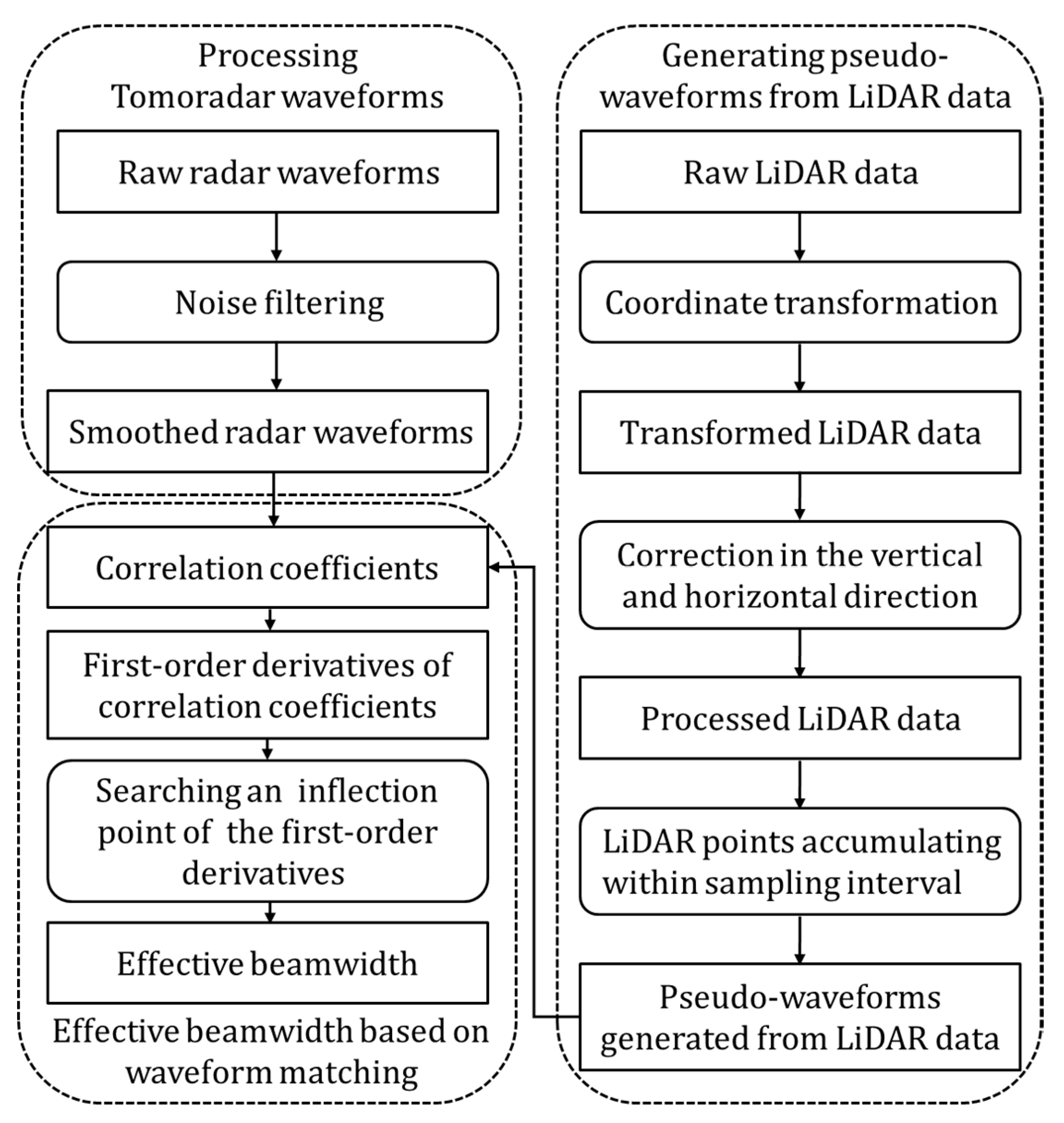
The subject of this paper is to determine the effective beamwidth based on the waveform matching technique analogously used in the large-footprint waveform lidar [
16,
24]. We utilized 8565 Tomoradar waveforms from one stripe collected in a test field in southern Finland and corresponding simulated-waveforms generated from coincident lidar data within various radar beamwidth settings to compute their correlation coefficients. By searching the best matching point with the distinctly slow growth of correlation coefficients, the effective beamwidth is resolved for each Tomoradar measurement. Meanwhile, an average effective beamwidth for all Tomoradar measurements is estimated as the actual Tomoradar beamwidth, and a visual comparison of canopy tops extracted from Tomoradar waveforms, lidar data within the average effective beamwidth, and HPBW is presented.
The rest of this paper is organized as the following:
Section 2 describes the study area, Tomoradar waveforms, and lidar data, and illustrates the methods on the derivation of the effective beamwidth;
Section 3 expounds the results and discussions about the effective beamwidth; finally, the conclusions are drawn in
Section 4.
3. Results and Discussions
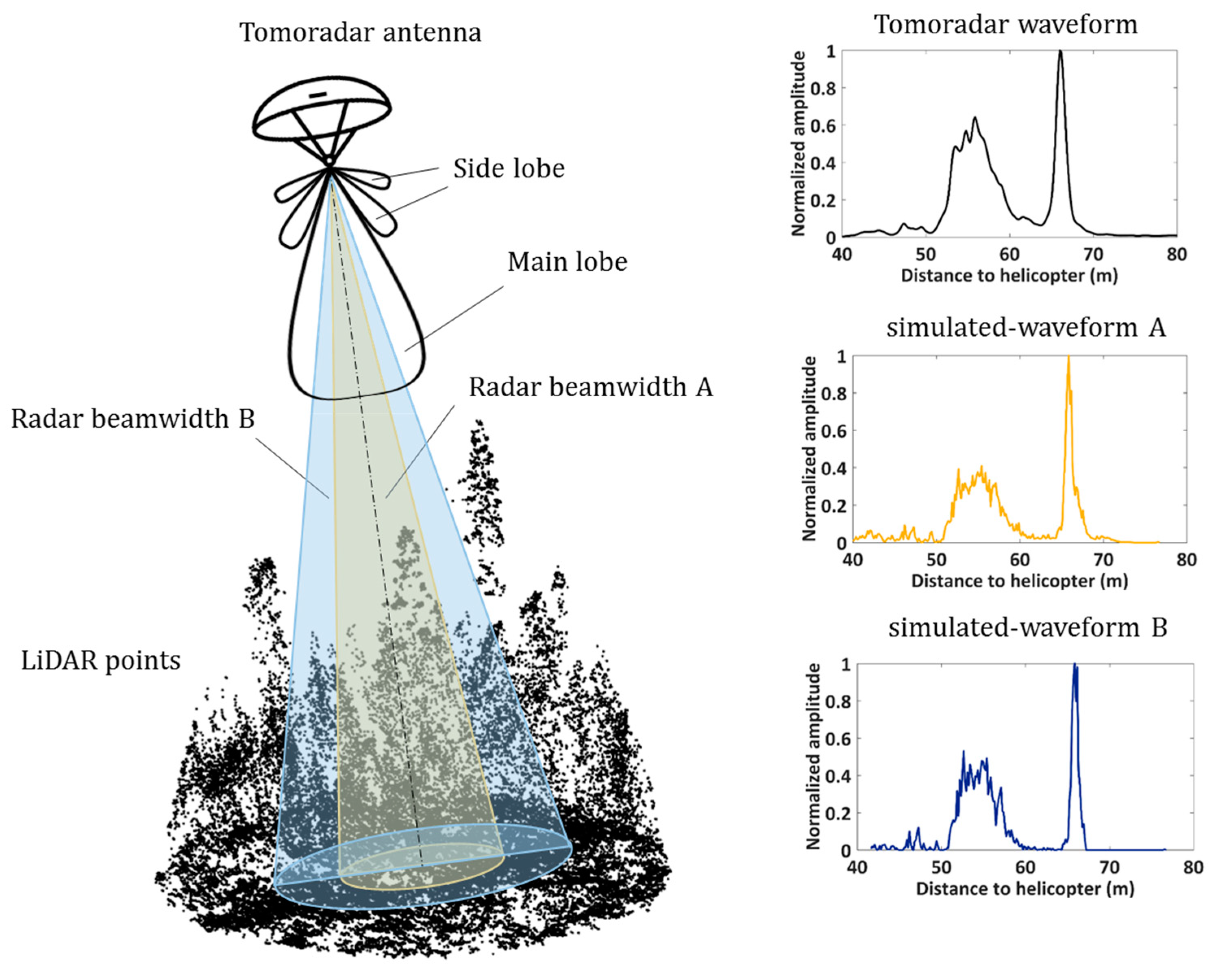
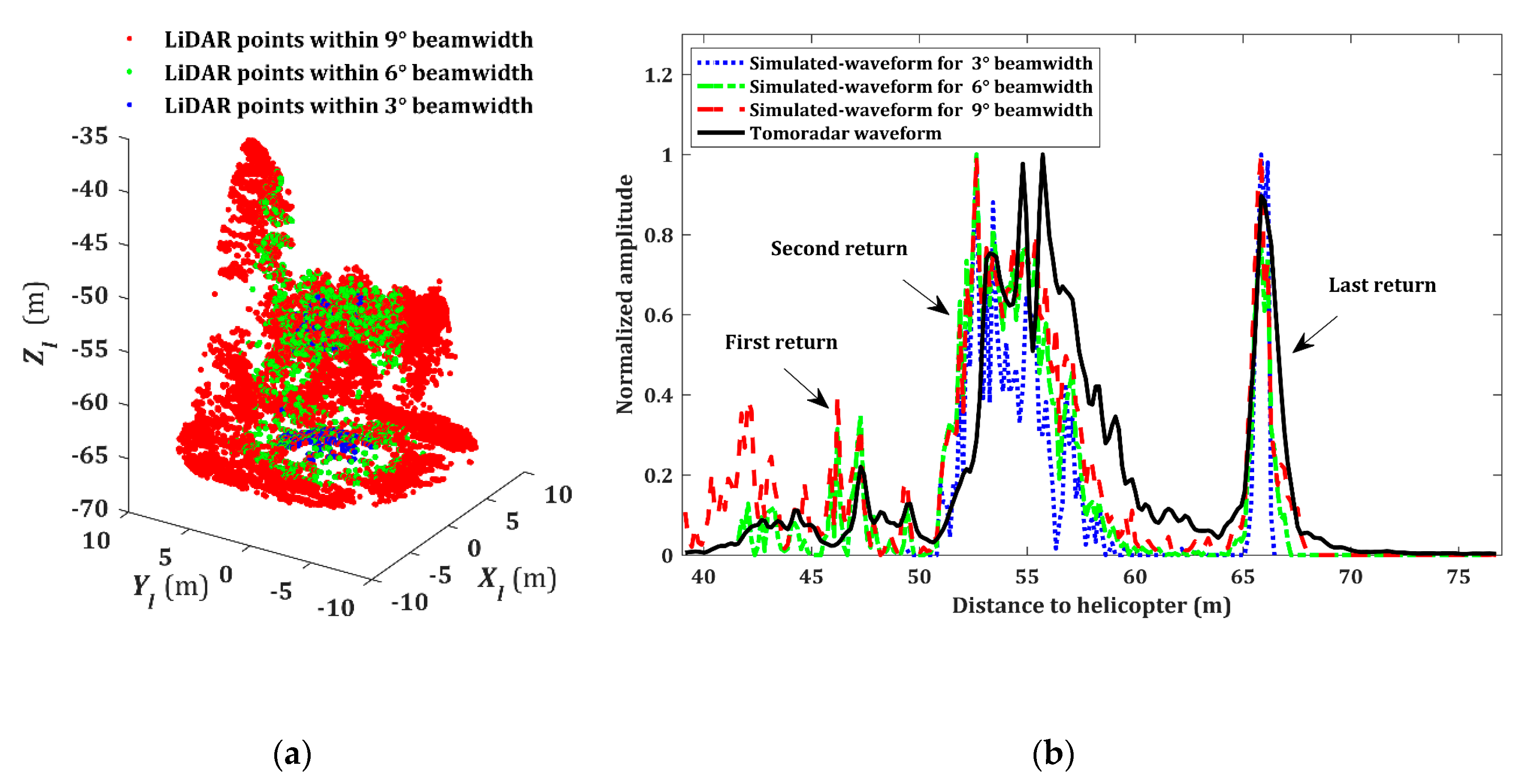
According to the above-mentioned methods, we processed the Tomoradar waveform and generated the simulated-waveforms within Tomoradar cone of 3°, 6°, and 9° for the 6700th Tomoradar measurement in the study area. The corresponding original lidar data and a graphical comparison between Tomoradar waveform and simulated-waveforms are shown in
Figure 7.
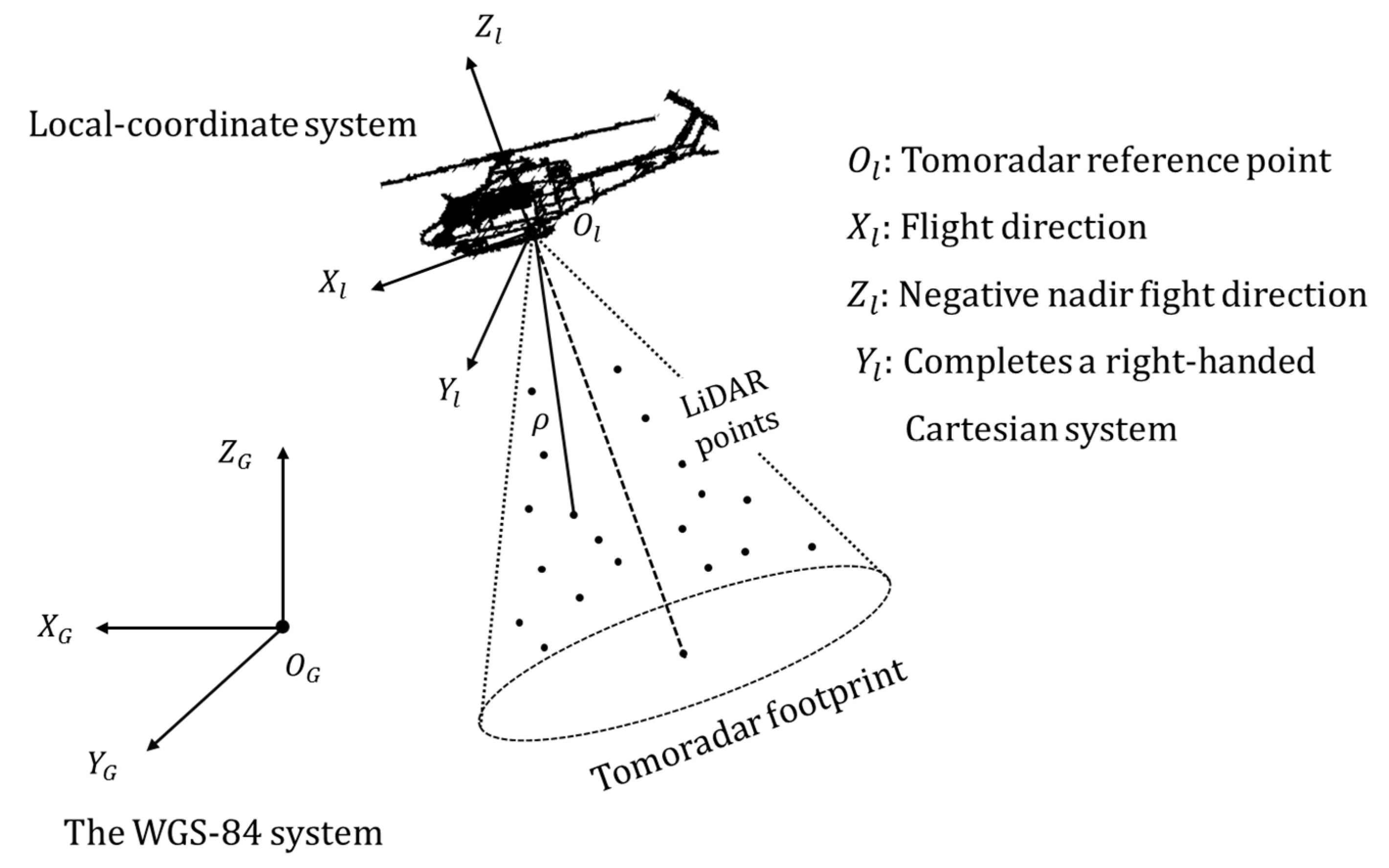
From the spatial distributions of lidar points in
Figure 7a, we discovered that the ground within Tomoradar cone could be roughly considered as a plane with a surface slope of 8.1° and a central distance of 66 m from the Tomoradar reference point. The peak-locations of last returns of all waveforms corresponding to the ground in
Figure 7b are approximately close to the central distance, which suggests that the alteration of radar beamwidth could have a negligible impact on extracting the centroid of planar ground. However, the canopy distributions, as shown in
Figure 7a are more complicated than those of the ground and considerably fluctuate with radar beamwidth. Hence, the first returns of the simulated-waveforms corresponding to the canopy would change and become much more similar to that of Tomoradar waveform when the radar beamwidth is gradually improved.
To profoundly explore the reason why radiation energy outside Tomoradar HPBW would contribute to Tomoradar waveform, we firstly transformed each lidar point in
Figure 7a from the Cartesian coordinate system
to a new frame
as
Then we accumulated the lidar point numbers
within a rectangular block with a center of
and size of
, and defined a relative point density as
Thus, through introducing Tomoradar antenna pattern in Equation (3), the contribution of lidar points within each block for the simulated-waveform could be roughly expressed by
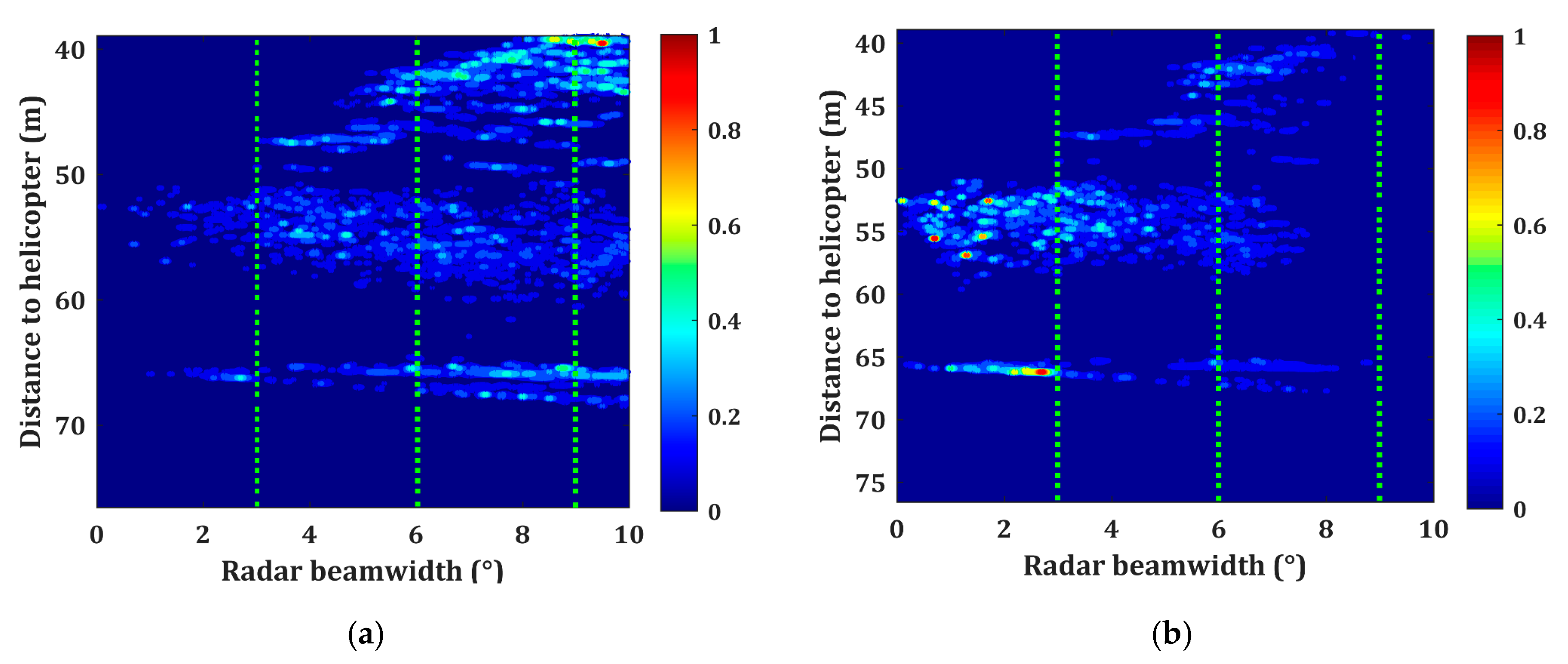
A visual comparison of the relative point density and the contribution of lidar points within each block for radar beamwidths of 3°, 6°, and 9° is illustrated in
Figure 8.
Observed from
Figure 8a, we discovered that three sections of dense lidar points from up to down intensively correspond to the canopy layer, middle layer of vegetation, and the ground, which are primary contributions to the first return, second return, and last return of the simulated waveform in
Figure 7b. The location of maximal relative point density is the canopy top with a higher point density and height. However, it may not provide the most significant contribution to the simulated waveform since it is far away from the axial center of Tomoradar and get lesser weight in the Tomoradar antenna pattern. As shown in
Figure 8b, the most important contributions of lidar points within each block for the simulated-waveform stem from the middle layer of vegetation and the ground. With the increment of radar beamwidth, the contributions of lidar points at the edge of radar beamwidth are decreased obviously. Therefore, we conclude that there are three factors for determining the contribution of lidar points outside Tomoradar HPBW to Tomoradar waveform: point density, vegetation height, and angular distance to Tomoradar axial center. As for a measured target with higher point density, taller height, and smaller angular distance, its backscattered energy could be bigger than the minimum detection threshold of Tomoradar and be detected by the Tomoradar receiver.
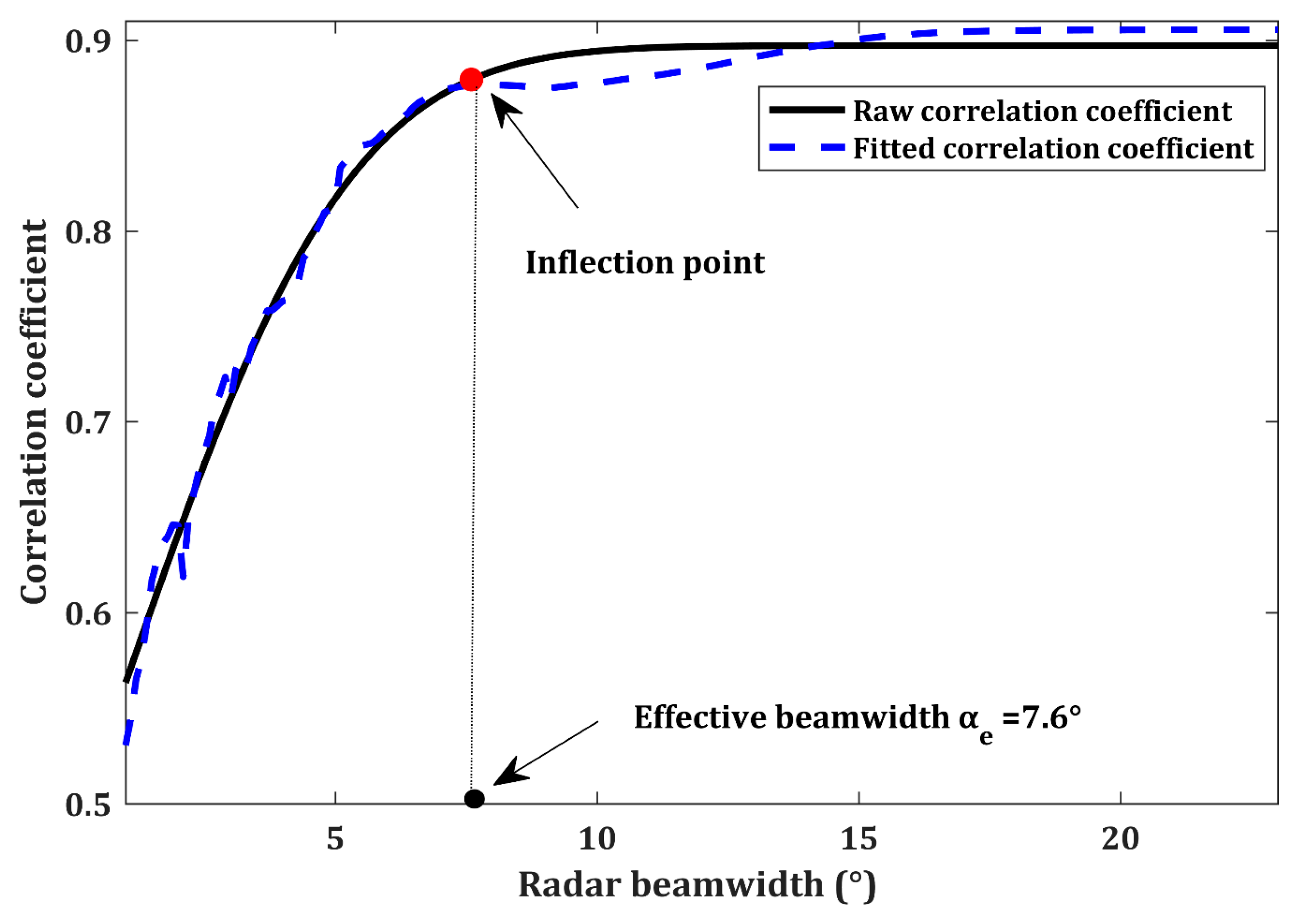
To quantitatively evaluate the similarity between Tomoradar waveforms and simulated-waveforms and find out the effective beamwidth for the 6700th Tomoradar measurement, the correlation coefficients were thoroughly computed for different radar beamwidths and presented in
Figure 9.
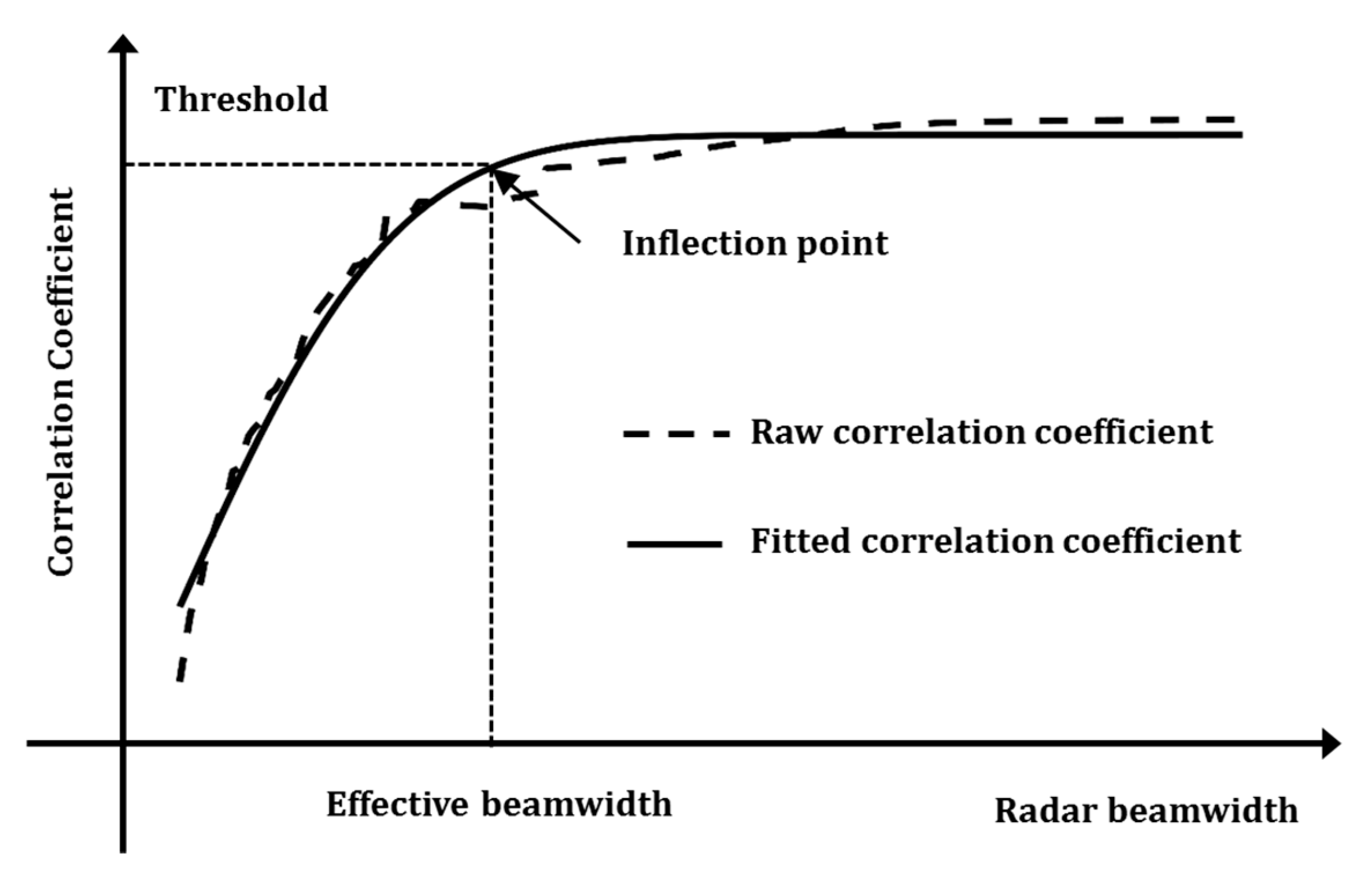
For radar beamwidth of 3°, 6°, and 9°, the correlation coefficients in
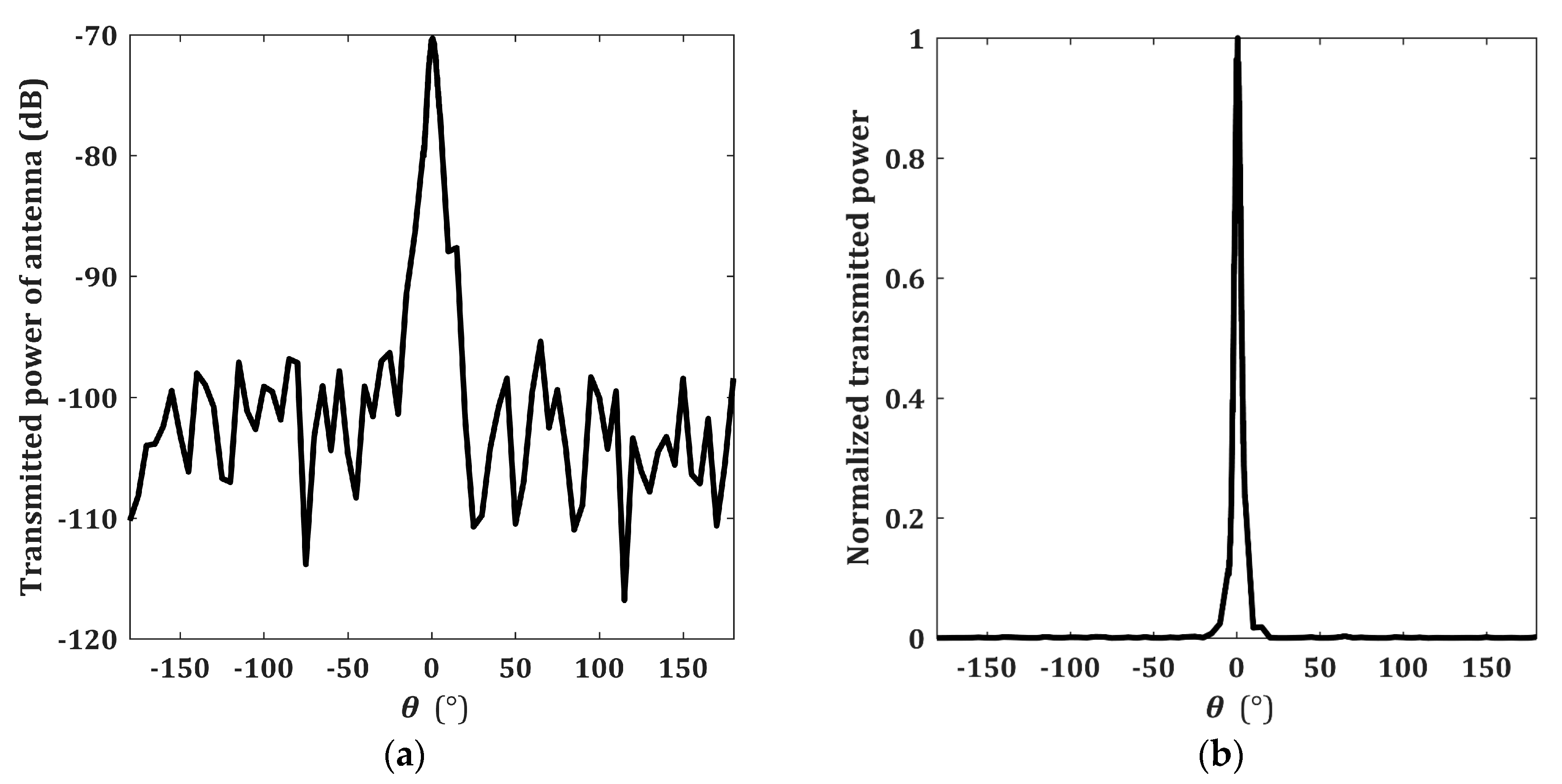
Figure 9 are 0.71, 0.85, and 0.87, respectively. It implies that the simulated-waveform within a bigger radar beamwidth could have stronger correlation strength with Tomoradar waveform. We sought the inflection point based on the correlation coefficients and found that the effective beamwidth is approaching 7.6°. Combing with the Tomoradar antenna pattern in
Figure 4, we discovered that the radiation power at the effective beamwidth was about 9.54% of the maximal radiation power, and a fraction of radiation energy within the effective beamwidth was approximately 90.2% of total radiation energy. The fraction was much greater than the ratio of radiation energy (62.4%) within Tomoradar HPBW. It demonstrates that 27.8% of microwave radiation energy outside Tomoradar HPBW should hit the vegetation and backscatter into the Tomoradar receiver.
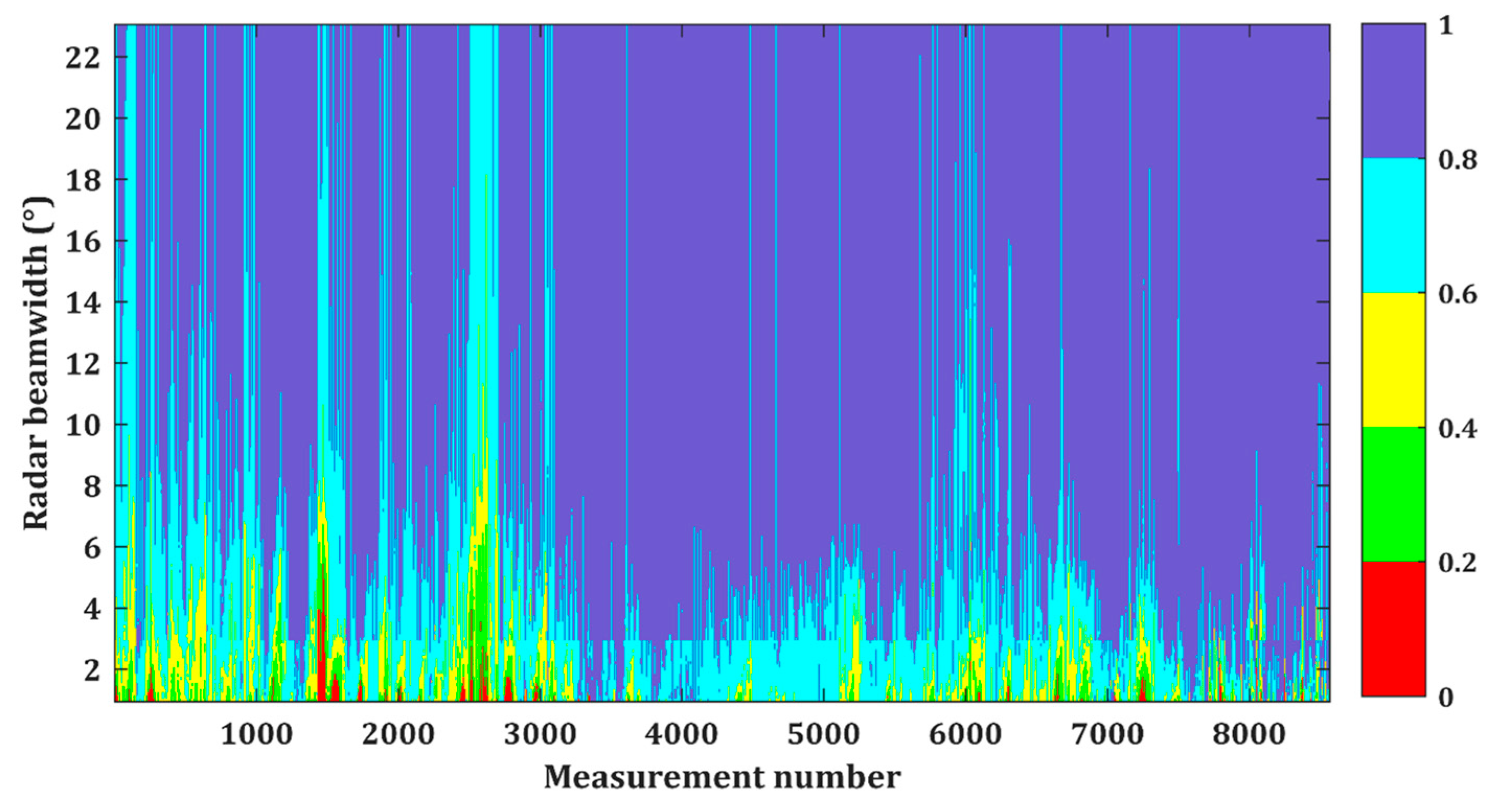
Due to the diverse nature of the vegetation distributions contained in Tomoradar measurement, the simulated-waveform could be distinguished from each other. Thus, the correlation coefficients between Tomoradar waveform and the simulated-waveform would present different regularity. We provide a relationship graph of the correlation coefficients versus radar beamwidth for 8586 Tomoradar measurements, as shown in
Figure 10.
From the distributions of correlation coefficients in
Figure 10, we concluded that the correlation coefficients would rise with the growth of radar beamwidth. Based on correlation strength, we partitioned the correlation coefficients into five segments with a range from 0 to 1 and an interval of 0.2. By calculating the numbers within each segment, we obtained the percentiles of all Tomoradar measurement numbers and illustrate some results in
Table 1.
In
Table 1, about 34.36% of simulated-waveforms have solid correlation strength with the Tomoradar waveforms for radar beamwidth of 3°, but the corresponding fraction would dramatically rise at 68.58% if the radar beamwidth increases to 6°. Indeed, the increasing rate of the percentiles of very strong is slowing down with the further increment of radar beamwidth. When the radar beamwidth is 21°, the correlation coefficient maintains at 91.68%.
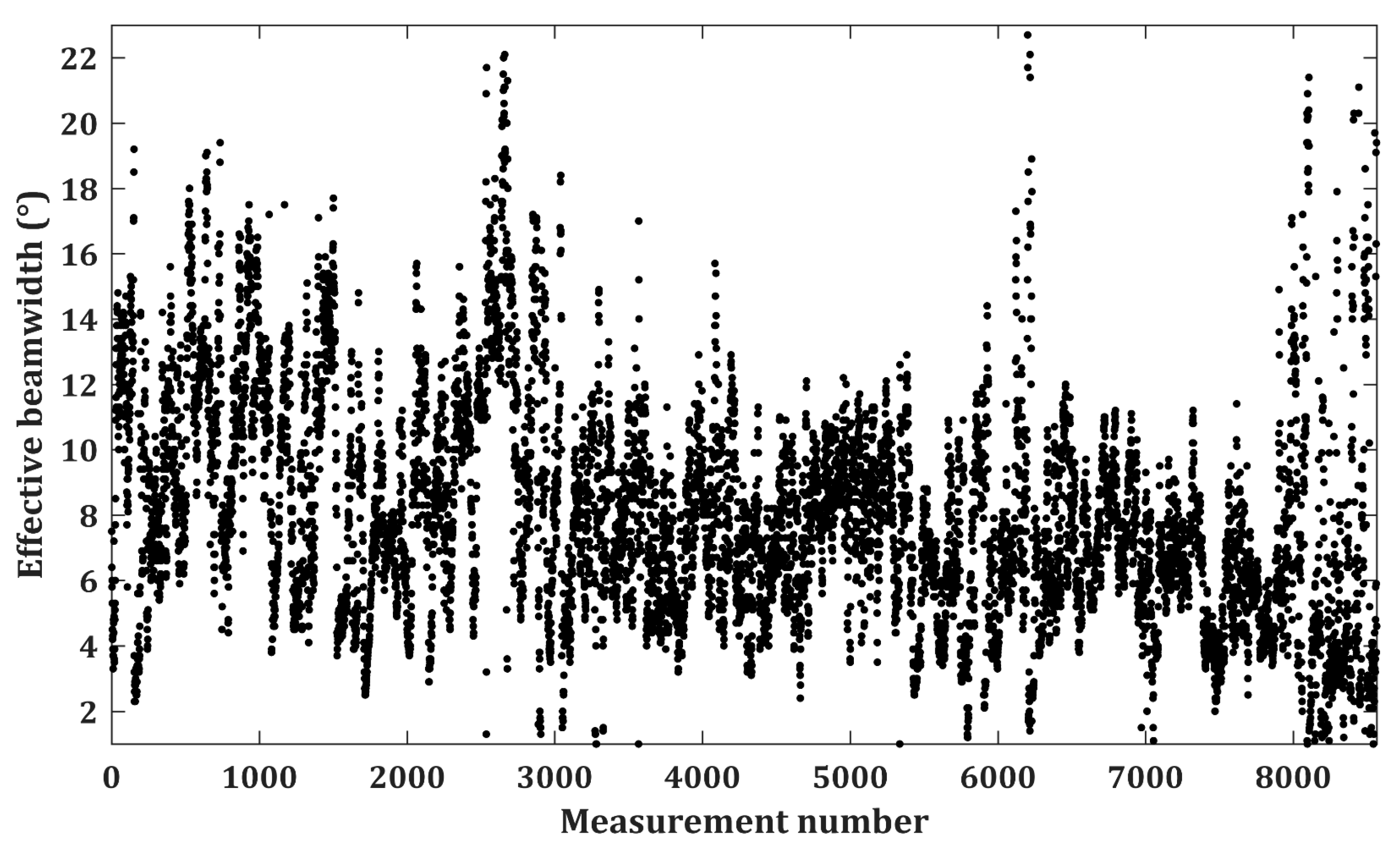
The effective beamwidth for each Tomoradar measurement is strictly dependent on the distributions of the correlation coefficients. That is, the variations of correlation coefficients could influence the determination of the effective beamwidth. Hence, we resolved the corresponding effective beamwidths based on the correlation coefficients in
Figure 10 and the extracted model of the effective beamwidth expressed in Equation (9), which are visually presented in
Figure 11.
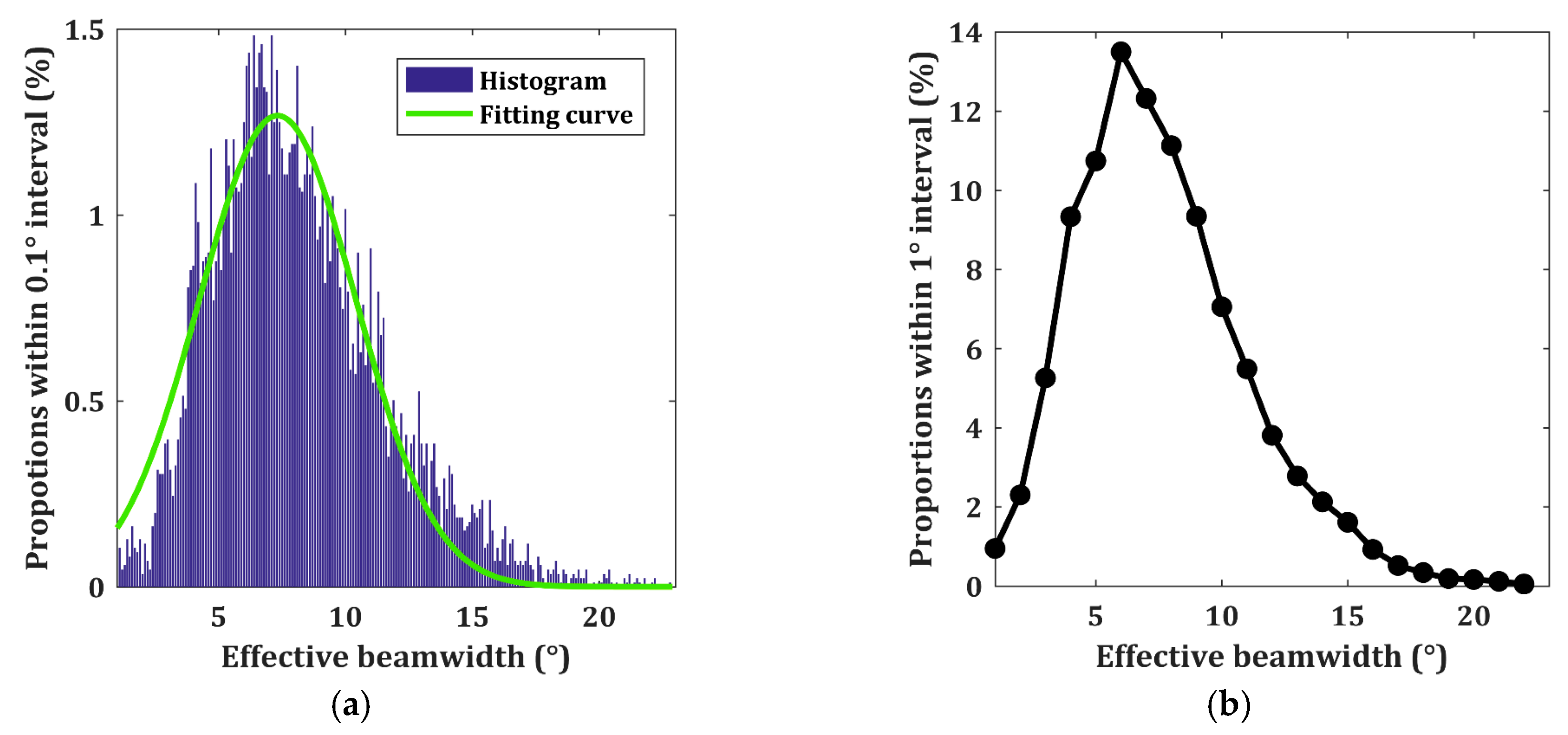
We noticed that the effective beamwidth is variable for each Tomoradar measurement, and most of the effective beamwidths ranged between 3° and 15°. We divided these effective beamwidths into 220 sections within a window from 1° to 23° and an interval of 0.1° and obtained the proportions to total Tomoradar measurements by counting the numbers within each section. A histogram of the proportions is illustrated in
Figure 12a.
In
Figure 12a, we find a clear normal distribution from the proportions’ histogram with a maximal amplitude of 1.27%, and a peak location of 7.3° and a sigma width of 3.1°. If we change the interval of each section from 0.1° to 1°, then we could acquire the corresponding percentage within every section, as shown in
Figure 12b, again, close to normal distribution. The effective beamwidth confined within the windows of (6° and 7°) holds a maximal fraction of 13.5%. Furthermore, 96.43% of the effective beamwidths take values from 3° to 20°, 3.25% of the effective beamwidths are less than 3°, and 0.32% of the effective beamwidths are greater than 20°.
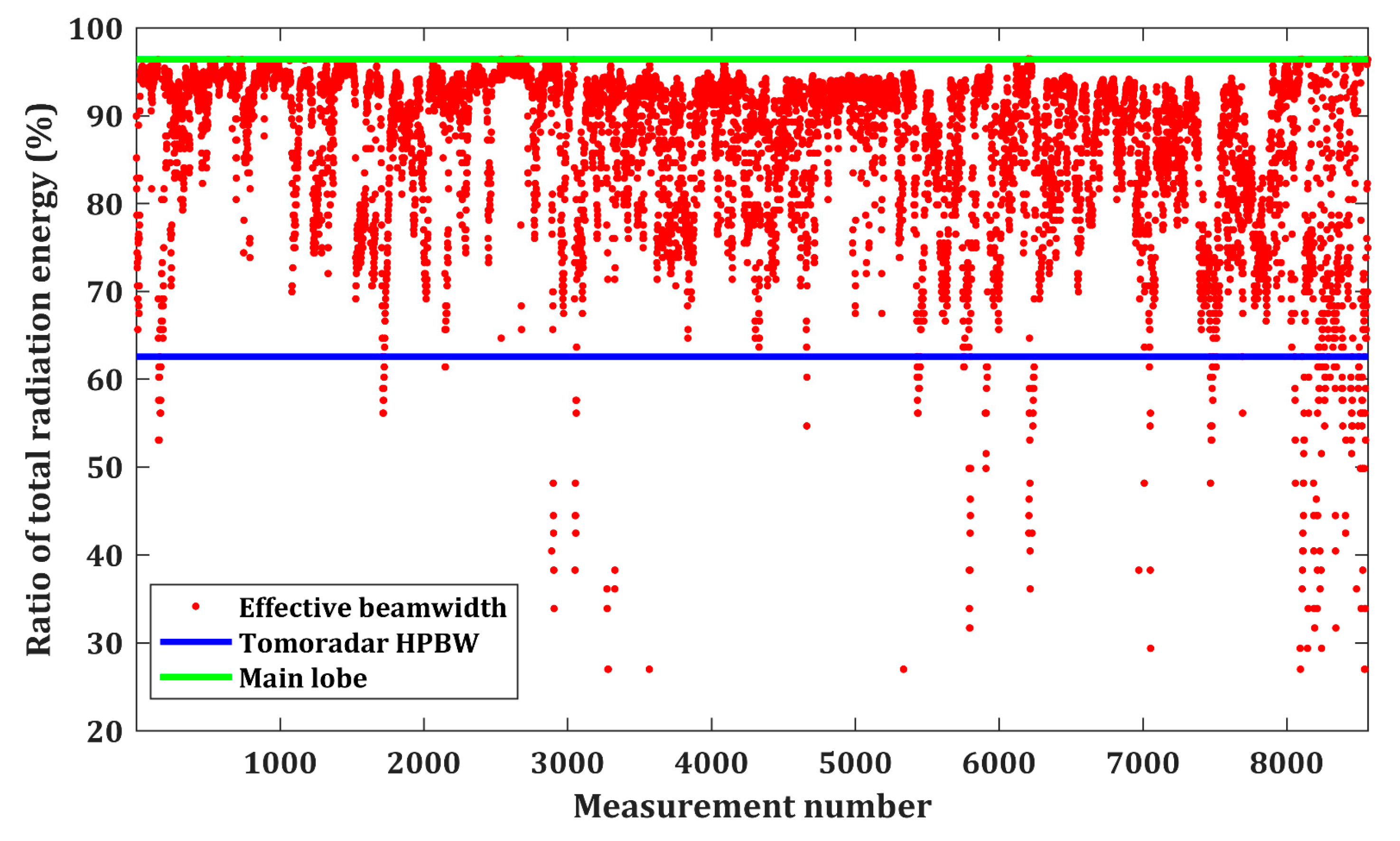
According to the distribution of the effective beamwidth in
Figure 11 and Tomoradar antenna pattern in
Figure 4, we compute the ratios of radiation energy to total radiation energy within the effective beamwidths as illustrated in
Figure 13.
From
Figure 13, we find the ratios of radiation energy within the effective beamwidths for 96.43% of Tomoradar measurements are ranged between 62.4% and 96.4%. The results demonstrate that it could be inappropriate to utilize Tomoradar HPBW as actual radar beamwidth because more radiation energies are transmitted into the canopy and ground and backscattered into the Tomoradar receiver. The scattered properties of vegetation would determine the radiation energy employed in the investigation of forest and the effective beamwidths.
However, it is impossible to select such variable effective beamwidths as the references for the antenna design and the determination of radar footprint size. Hence, we define an optimal and fixed beamwidth named as average effective beamwidth (AEBW)
to take the place of Tomoradar HPBW as the following:
where
and
represent the effective beamwidth and the fraction within each section in
Figure 11.
Based on the histogram in
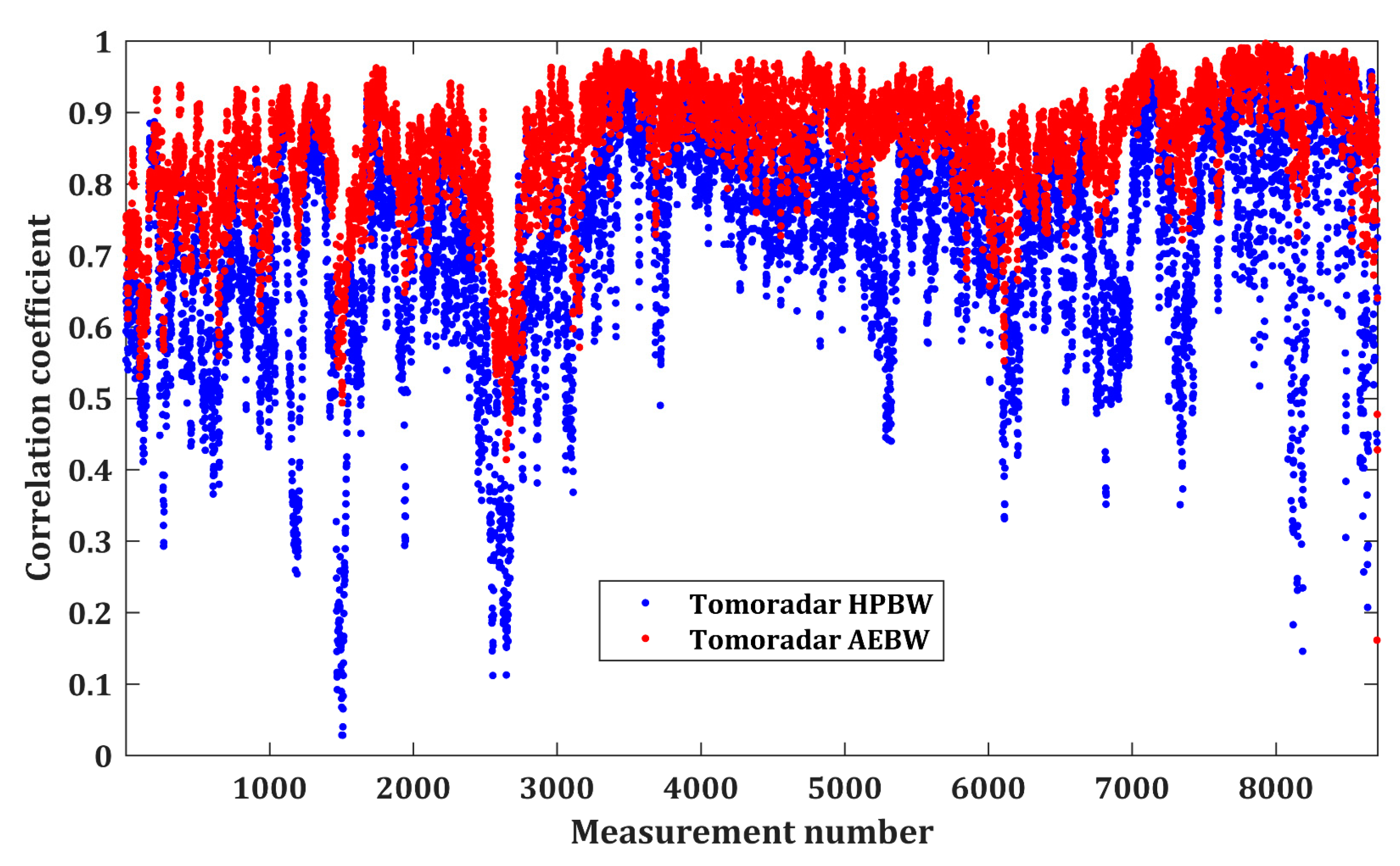
Figure 12a, we resolved that Tomoradar AEBW was approximately 8.0° and discovered that the fraction of total transmitted radiation energy should maintain at a level of 91%. Furthermore, we generated the simulated-waveforms from lidar points within a divergence of 8.0° for each Tomoradar measurement and calculated the correlation coefficients between Tomoradar waveform and simulated-waveform. A comparison of the correlation coefficients derived from the simulated-waveforms within Tomoradar HPBW and AEBW is presented in
Figure 14.
Observed from
Figure 14, the correlation coefficients for Tomoradar AEBW are normally more significant than those for Tomoradar HPBW. About 78.84% of Tomoradar waveforms and simulated-waveforms generated within Tomoradar AEBW have very strong correlation strength. The fraction is much more than that for Tomoradar HPBW described in
Table 1. It suggests that Tomoradar waveforms correlate very well with those simulated-waveforms if Tomoradar cone equals to Tomoradar AEBW rather than Tomoradar HPBW.
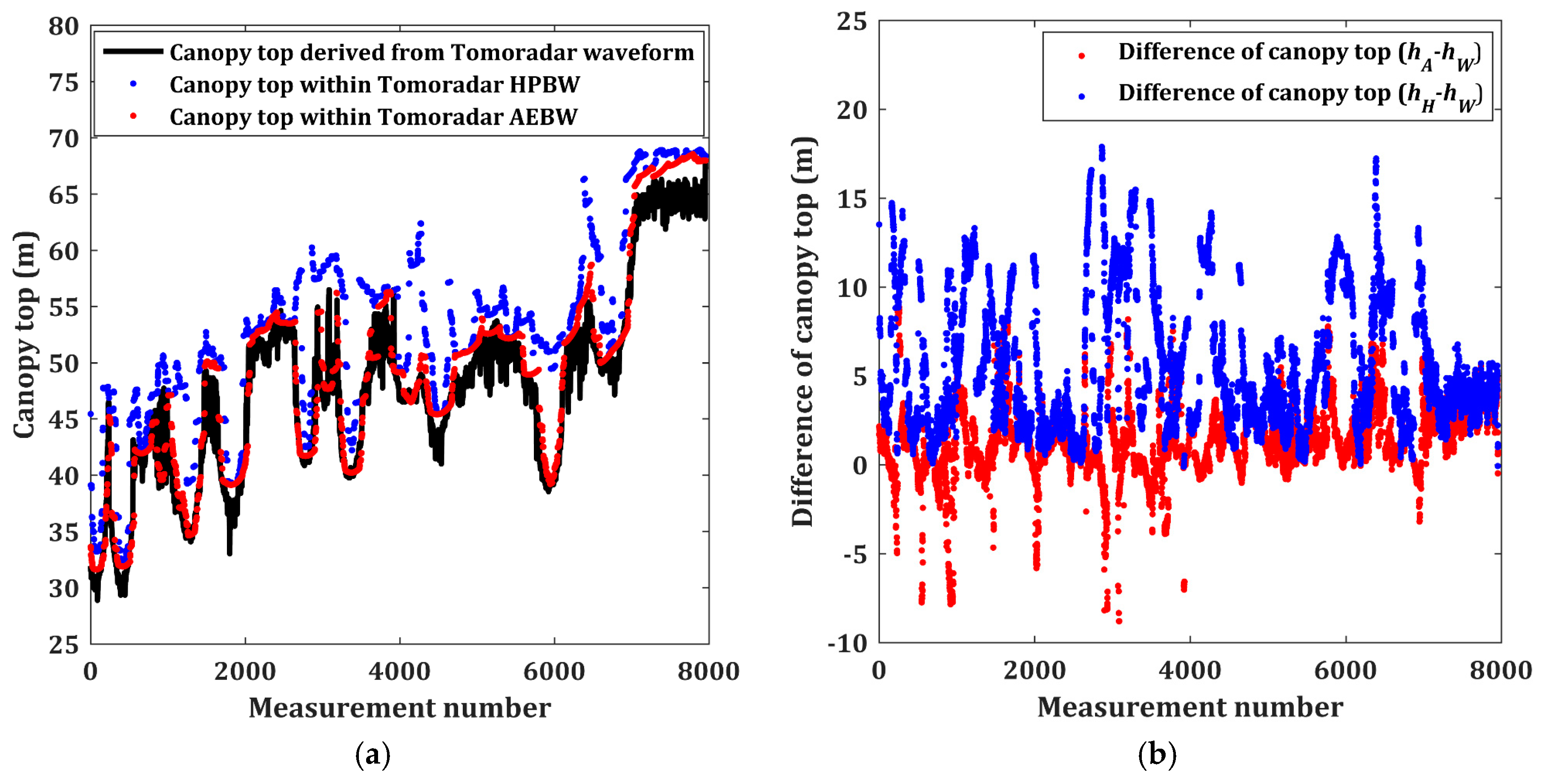
Furthermore, to explore whether Tomoradar AEBW is appropriate in the forest investigation, we extracted the canopy tops from lidar data within the Tomoradar HPBW and AEBW, symbolized with
and
, and compared them with those derived from coincident Tomoradar waveforms, expressed by
. We designated canopy tops derived from Tomoradar waveforms as references and acquired the difference of canopy tops between them and those within Tomoradar HPBW and AEBW. A graphic description of canopy tops derived from Tomoradar waveforms and lidar data within Tomoradar HPBW and AEBW is shown in
Figure 15a. Furthermore, the corresponding differences of canopy tops are presented in
Figure 15b.
We realized that three series of canopy tops present roughly similar fluctuations in
Figure 15a. However, the canopy tops extracted from lidar data within Tomoradar AEBW are generally lower than those within Tomoradar HPBW. Moreover, the differences of canopy top derived from Tomoradar AEBW are almost always smaller than those derived from Tomoradar HPBW in
Figure 15b. It implies that the canopy tops within Tomoradar AEBW are much closer to those extracted from Tomoradar waveforms than those within Tomoradar HPBW.
To quantitatively assess the differences of the canopy tops extracted from Tomoradar waveforms and lidar data within HPBW and AEBW, we provided three groups of evaluation indexes: correlation coefficients between canopy tops
and
; (b) standard deviations of the differences of the canopy tops
and
; and (c) mean values of the differences of the canopy tops
and
. Based on the results in
Figure 15, we computed these evaluation indexes, as shown in
Table 2.
From the results in
Table 2, we perceive that the canopy tops derived from lidar data within Tomoradar AEBW correlate very strongly with those derived from Tomoradar waveforms, and the corresponding correlation coefficient is approaching to 1. The standard deviation and mean value of the differences of the canopy top derived from lidar data within HPBW and Tomoradar waveforms individually are 3.79 m and 5.55 m. However, those would become significantly decreased as 2.04 m and 1.39 m if Tomoradar cone is Tomoradar AEBW. These evaluation indexes mean that the canopy tops derived from lidar data within Tomoradar AEBW should be more accurate than those from lidar data within HPBW. That is, Tomoradar AEBW could be more applicable as the actual Tomoradar cone to explain the forest investigation.
4. Conclusions
The radar effective beamwidth determines an actual illuminated area on the measured target rather than traditional HPBW. We proposed a method to determine the effective beamwidth according to the resemblances between radar waveforms and the simulated-waveforms generated from coincident lidar points.
By processing 8565 Tomoradar measurements and corresponding lidar data in a broad and heterogeneous recreation area, we conclude that actual radar effective beamwidths are generally larger than radar HPBW. It suggests that radiation energy outside radar HPBW would commonly transmit into vegetation and backscattered into the radar receiver. Thus, we could determine the radar footprint size depending on not radar HPBW, but the effective beamwidth.
Unfortunately, the effective beamwidth is changeable with the scattering property of vegetation, which makes us unable to designate such unstable beamwidth as radar beamwidth. Therefore, radar AEBW is put forward based on effective beamwidths and corresponding proportions. If we replace radar HPBW with AEBW, we find that the simulated-waveforms correlate better with Tomoradar waveforms and canopy tops derived from lidar data, which are much closer to those extracted from Tomoradar waveforms. These results demonstrate that radar AEBW should be more appropriate in the determination of radar beamwidth. Therefore, as for the forest investigations by profiling radar systems, we suggest that the radar AEBW is a reliable reference to select the region size of validation data.
Due to the diversity of vegetation in the study area, the effective bandwidth of the system does not always follow the AEBW value. By applying the proposed AEBW, the STD of the canopy top difference between LiDAR and Radar decrease from 3.79 m to 1.39 m with an improvement of 63%, and the mean value of the canopy top difference between two active sensors decreases from 5.55 m to 2.04 m with an improvement of 64%. Thus, we consider that the AEBW value can be applied to other scene types of the boreal forest as well for the given Tomoradar.
The uniquity of field test datasets by observing the identical dry boreal forest target with both microwave radar and LiDAR offers an excellent opportunity for us to investigate how the effective bandwidth affect the backscattered signal quantitatively. The Radar return depends on various factors, especially the antenna characteristics. A wider AEBW is determined based on the method proposed in this research to describe the antenna characteristics for more precisely extracting the canopy top of the boreal forest. In addition to the AEBW concept, such an investigation method is also meaningful for other researches on the same topics.
However, radar AEBW could be changed with a variety of radar antenna patterns. So, we suppose that a fraction of total radiation energy within radar AEBW may be a superior index for defining the divergence angle of radar, just like the definition of the lidar footprint based on the percentage of transmitted laser energy. In this paper, we suggest that the fraction is suitable to be 91% in the radar case, which is similar to 86.5% in the lidar case.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}