3.1. Validation of Inversion Model under DLEF by Simulation Data
To validate the inversion model constrained by our DLEF model, we first used the NLDAS-Noah water storage changes data (1/8° intervals of latitude and longitude) to calculate the global vertical deformations, at 0.25° × 0.25° uniform distribution grids/sites, to ensure that the simulation observation numbers were sufficient. Then, we inverted the California, Washington and Oregon region water change by our inversion model from these calculated vertical deformations. To quantify the successfulness of the inverted water storage, we calculated the percentage of the variance reduction (VR) [
6,
24,
25], i.e., the comparison variance explained the percentage between the inverted and original NLDAS water storage by:
where
and
are the NLDAS–Noah and inverted water storage changes, respectively.
We designed six inversion simulation tests (
Table 2). For the test 1 (T1): we only used the vertical deformations (VD
0) of 0.25 × 0.25 deg uniform distribution sites (calculated by the NLDAS–Noah data) in the study region to directly inverse the water storage changes; T2: we first remove the effect (in the study region) of the mass change outside the study region (VD
CSR ) using CSR Mascon mass change data from the VD
0 and then repeat T1; T3: after removing the outside mass change effect like in T2, we add the boundary included and use our new inversion model Equation (2b) to invert the water storage. The constraint parameters on
and
are selected by the search radius
which is determined by the DLEF model. Then, we inverse the water storage changes with the different search radius, i.e., three, five and seven times the radius of the net grid (3
, 5
and 7
), respectively; T4: similar to T2, but we add the grids’ vertical deformations of the outside study region (VD
out0) within 3
, 5
and 7
from the study region boundary, and then repeat T1; T5: we repeat T4, the difference is that we add the Gauss white noise with 20% amplitude ratio (the noise can reach 20–30% of amplitude [
26]) to each grid in or outside study region; T6: we use the part of the vertical deformations (VD
0 and VD
out0) which are at the real GPS sites distribution (un-uniform sites like in
Figure 1) to invert the water storage changes, and then repeat T2 to T5. In T6, the vertical deformations in the outside region were also based on real GPS sites’ distribution as well.
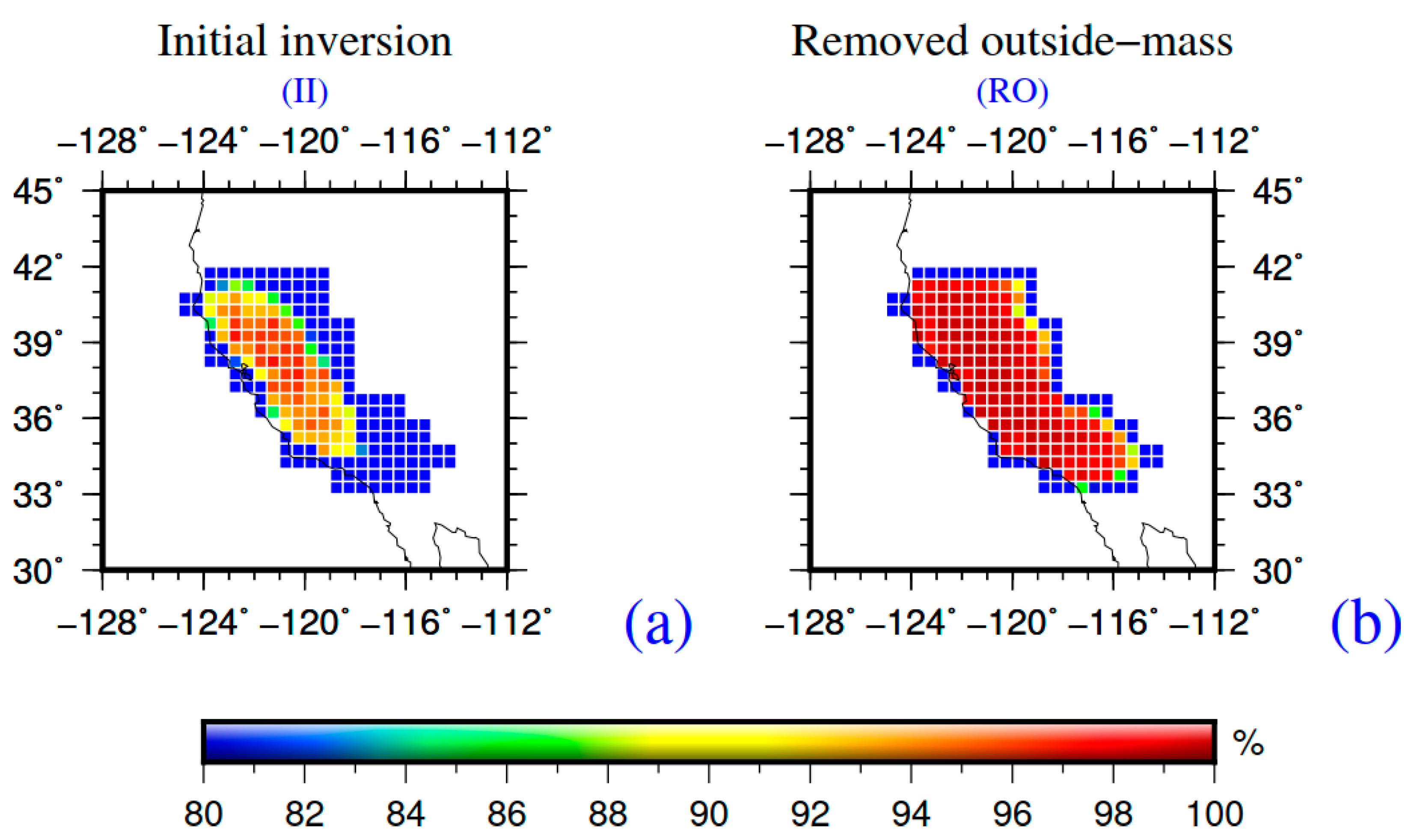
For case T1, only less than 30% of the inversion results (
Figure 3a) have good agreements, i.e., VR greater than 90%, with the simulation water storage changes in California (the inversion spatial resolution is 0.5°), because the effect of the outside mass surrounding the study region have a large effect on the study region. Thus, the vertical deformations in the study region not only contain the water storage in the study region but are also influenced by outside mass variations. Furthermore, the agreement shows distinct spatial characteristics, and high VR (≥90%) in the center while low VR (≤90%, some even lower than ≤50%) in most boundary regions (
Figure 3a). These T1 simulation results validate that the effect of mass outside of the study region must be considered.
We thus used the GRACE CSR Mascon product to remove the effect of large-scale mass outside the study region by Equation (1) in the case of T2 and then repeated T1. In this case, about 80% of the grids results have better agreement, i.e., VR is about 99%, with the simulation water storage changes. Unfortunately, other 20% grids’ results around the boundary regions still have worse VR (<80%) to compare with the central grids’ results (
Figure 3b).
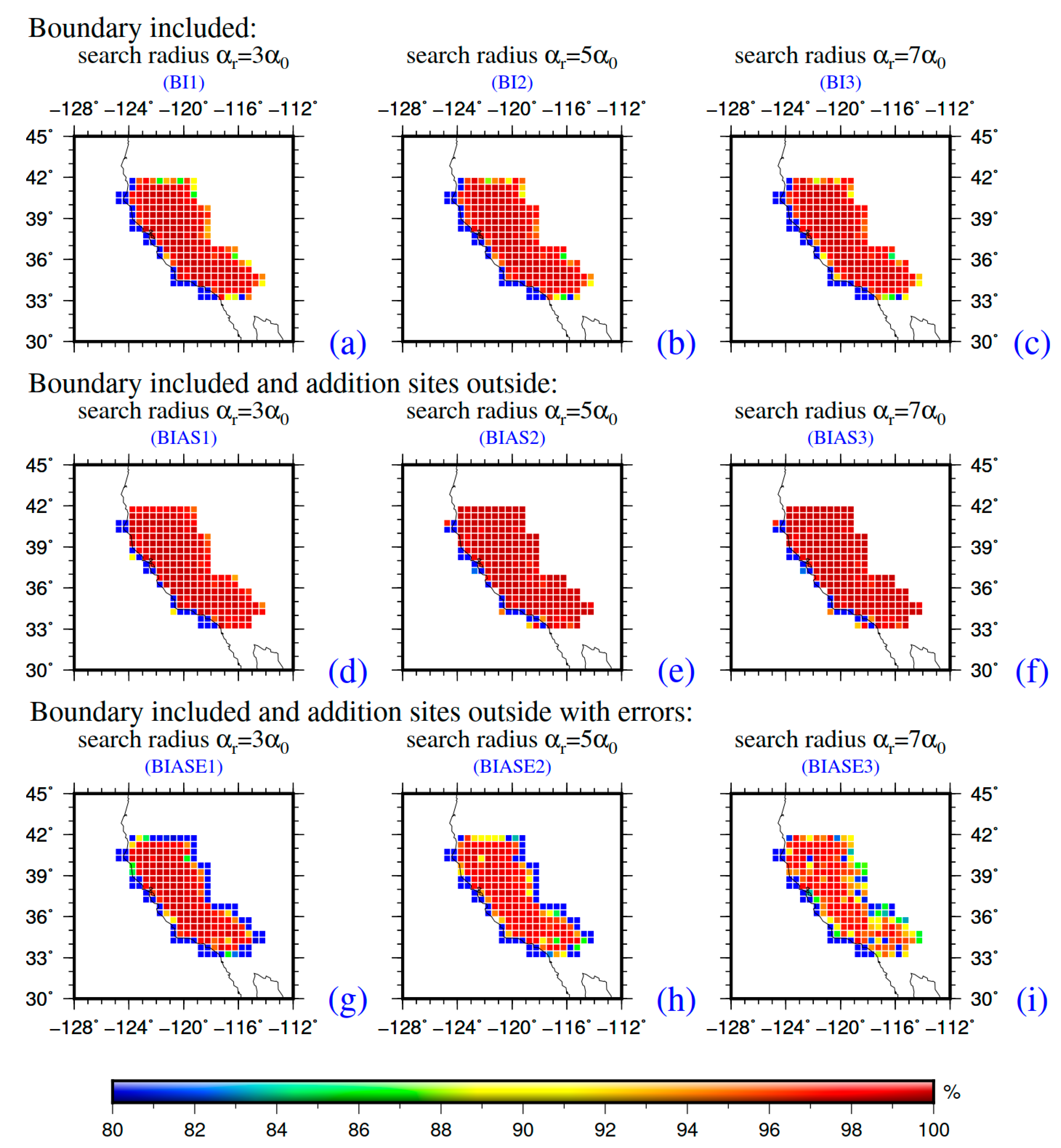
To overcome the aforementioned worse results in the boundary region, in case T3, we add the boundary included in the traditional inversion model, i.e., our new Equation (2b) model, with the Green function parameters
to constrain on output parameter
. The new constraint results (
Figure 4a) have obvious enhancement (VR > 90%) in the boundary regions, and in the center region, the new constrained results (
Figure 4a) also have a small enhancement of about 1% in VR. Then, we try to change the boundary-included region, i.e., to set the search radius to be 5
and 7
, respectively, and repeat the T3: the results show that more constraints have no obvious effect on the results’ enhancement, which is further evidence that choosing
as the search radius is suitable enough in most cases (
Figure 4b,c).
In case T4, we extended our study region with the additional outside vertical deformations; here, the inversion region is larger than the original study region, and its effect on the original boundary grids can be observed. The new study region is extended with 3
, 5
and 7
from the original study region boundary, respectively. Subsequently, we used the T1 inversion method to invert the water storage in the original and outside study region. The inversion results indicate that in this case, we can get more accuracy results (VR > 95%,
Figure 4d–f and
Figure 5) at the original boundary grid and the extend area with a 3
search radius which is good enough. Here, we notice that the inversion results are still bad (VR < 80%) in the coastal area, due to the fact that there is no extended value in the ocean and that the true value in these coastal areas tends to zero.
Generally, the errors of the GPS vertical deformations can reach the level of about 2–3 mm [
26,
27,
28,
29]. To mimic the case that the GPS deformations outside the study region have “errors”, we added the vertical deformations outside the study region with Gauss white noises of 20% amplitude ratio of that of the corresponding vertical deformations, and repeated T4. We called it the T5 case. The T5 results indicate that the Gauss white noises were brought into the inversion results, especially in the boundary regions (VR < 80% while in T4 VR > 95%), when the extended study region radius is the same as 3
. However, if the extended study region radius is extended to 5
or 7
, the VR at boundary grid have some increase from 80% to 90% but in the center grid decreased by about 5–10% (
Figure 4g–i and
Figure 5). Therefore, if the vertical deformations with errors in the outside study regions (this is almost the case in the real GPS data), our presented T3 results will have some obvious advantage to compare with that of T5. The similar conclusion can be seen in the Washington and Oregon sub-region (
Figures S3–S5) too. Thus, our new boundary-included model of Equation (2b) will get better inversion results than the traditional method of Equation (2a) in this case.
Through the simulation tests T1–T5, we find that our boundary-included inversion model (Equation (2b)) can effectively improve the results by about 20% in the boundary regions. Actually, it was expected that there is another advantage for our new method in some special regions where there are no GPS observations outside but large effects from the UMC. Of course, the above T1–T5 simulations are all inverted from the uniform distributed vertical deformation, but in fact the real vertical deformations are usually observed by GPS sites with non-uniform spatial distribution. Therefore, we further design the simulation test T6, in which case the vertical deformations at the real GPS sites’ location but calculated from the NLDAS-Noah data are used to invert the regional water storage changes. Here, we only use 3
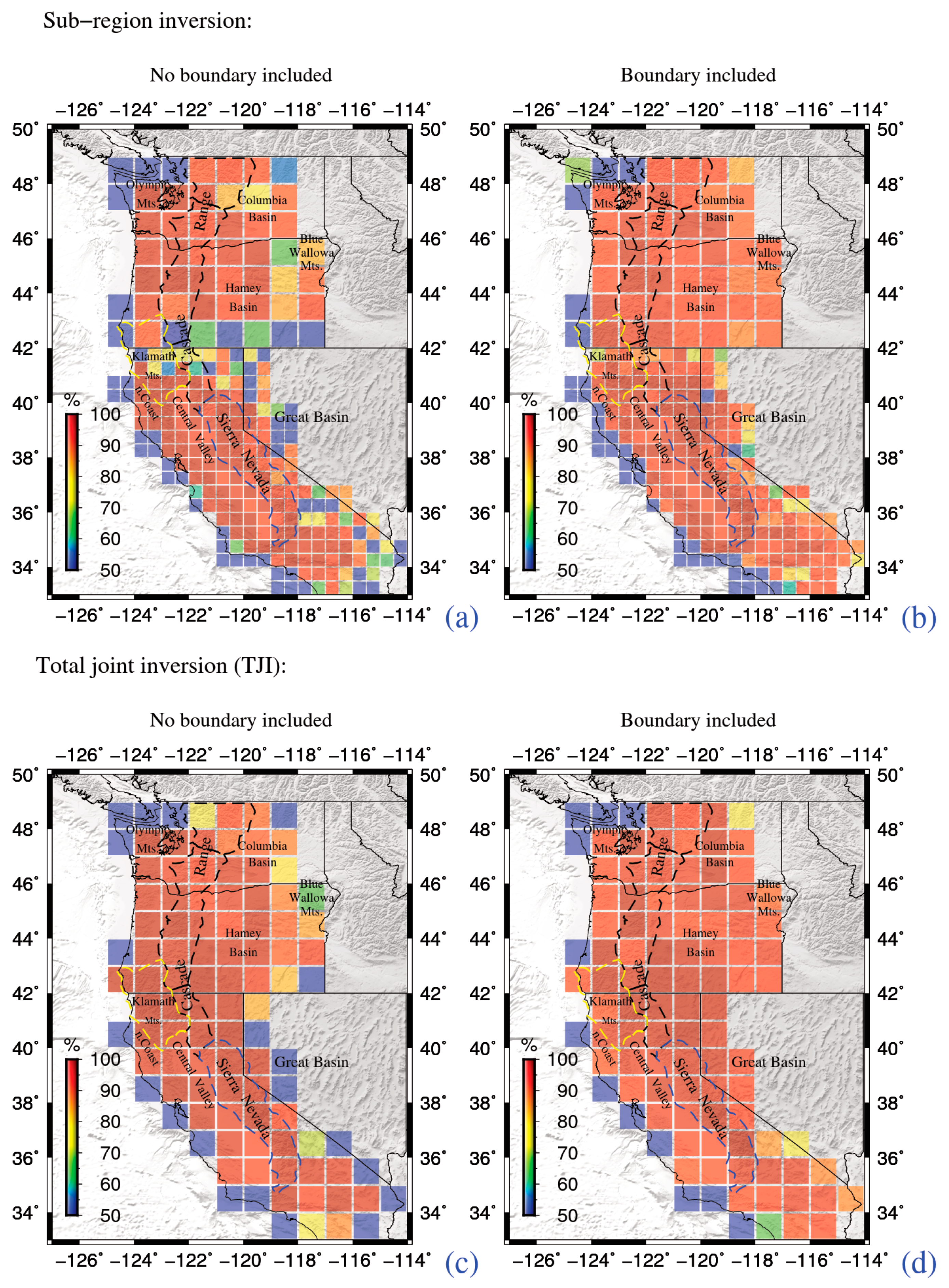
as the search radius to select the boundary-included constraint parameters. Because of the different spatial distribution of the GPS sites in the California sub-region and the Washington–Oregon sub-region, we inverted the water storage grid as 0.5° and 1° spatial resolutions in California and in Washington–Oregon, respectively, and independently. At the same time, we combined the above two study sub-regions as one (total joint inversion), i.e., the Pacific Rim of the western United States region, and inverted the water storage in the spatial resolution of 1°. All the inversion results indicate that the water storage VR in the boundary regions is enhanced with 10–20% (
Figure 6). Even if we add outside vertical deformations without noises or with Gauss white noises as T4 or T5 as in the above inversion, the conclusions are still similar.
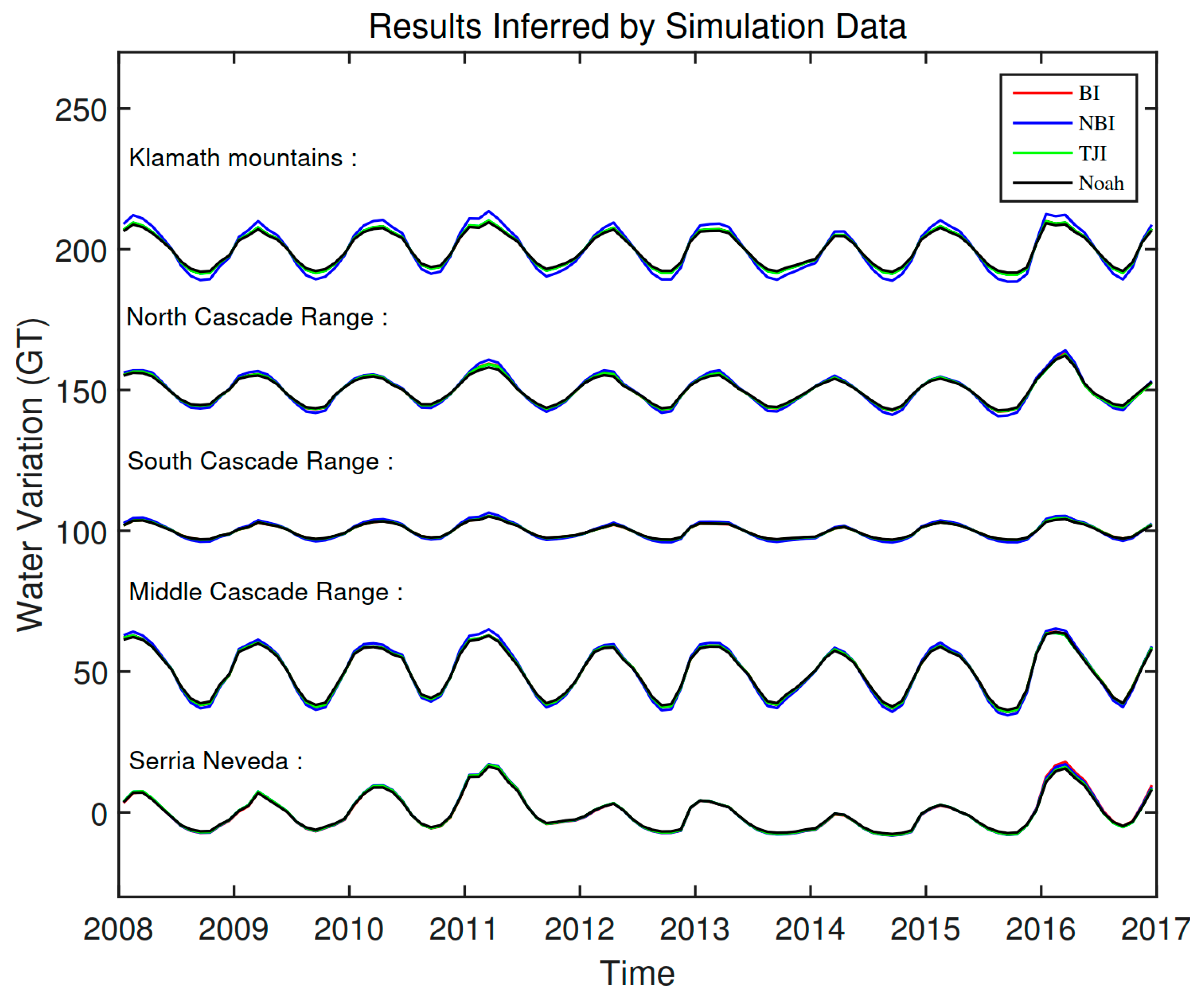
To further show our inversion results of T6 in more detail, we selected three physiographic provinces, i.e., Klamath mountains, Cascade Range, and Sierra Nevada, to compare the water storage time series between the inversion results and the original input of NLDAS-Noah, because in these regions, there are major water storage changes with clear seasonal signals of about 30–40 gt. The interesting thing is that these three regions denote different spatial characteristics. For example, when we use the California sub-region and Washington–Oregon sub-region for inversion, respectively, the physiographic province Klamath Mountains is in the boundary, Cascade Range has a small part in the boundary (e.g., north and south Cascade Range), and Sierra Nevada is in the center of the inversion region. Unquestionably, the results show that if the objective grids are in the center of the study region or only have limited boundary grids, our new model Equation (2b) will give little VR enhancement (0.2% in physiographic province Sierra Nevada and 1.9% in the physiographic province middle Cascade Range,
Figure 7). However, if the inversion results are in the boundary regions, such as Klamath Mountains, north and south Cascade Range, these VR enhancements will be 14.3%, 9.7% and 7.6% (
Figure 7), respectively, which indeed is a large improvement by our new model. If these physiographic provinces (Klamath Mountains, north and south Cascade Range) are all in the center of the study region (combine into only one big study region and invert it), all the inversion results in these three regions will fairly agree with the true value (NLDAS-Noah) (
Figure 7).
Therefore, through these simulations (T1–T6), we validated that using the boundary-included inversion model Equation (2b) can improve the inversion result effectively in the boundary region. Then, we will show the water storage changes inverted from real GPS vertical deformation data by our presented model Equation (2b) in the Pacific Rim of the western United States.
3.2. Water Storage Changes Inverted from GPS Data
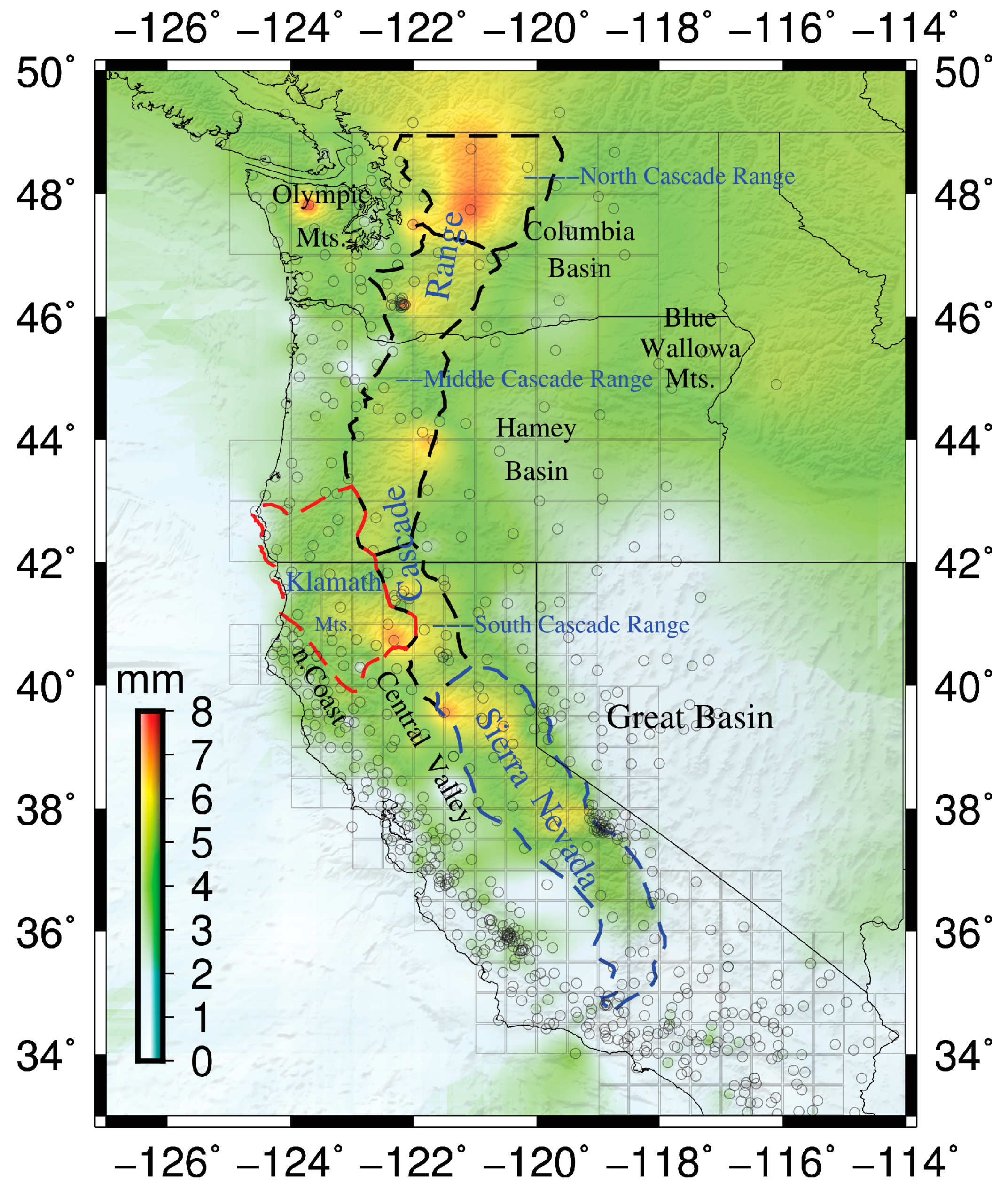
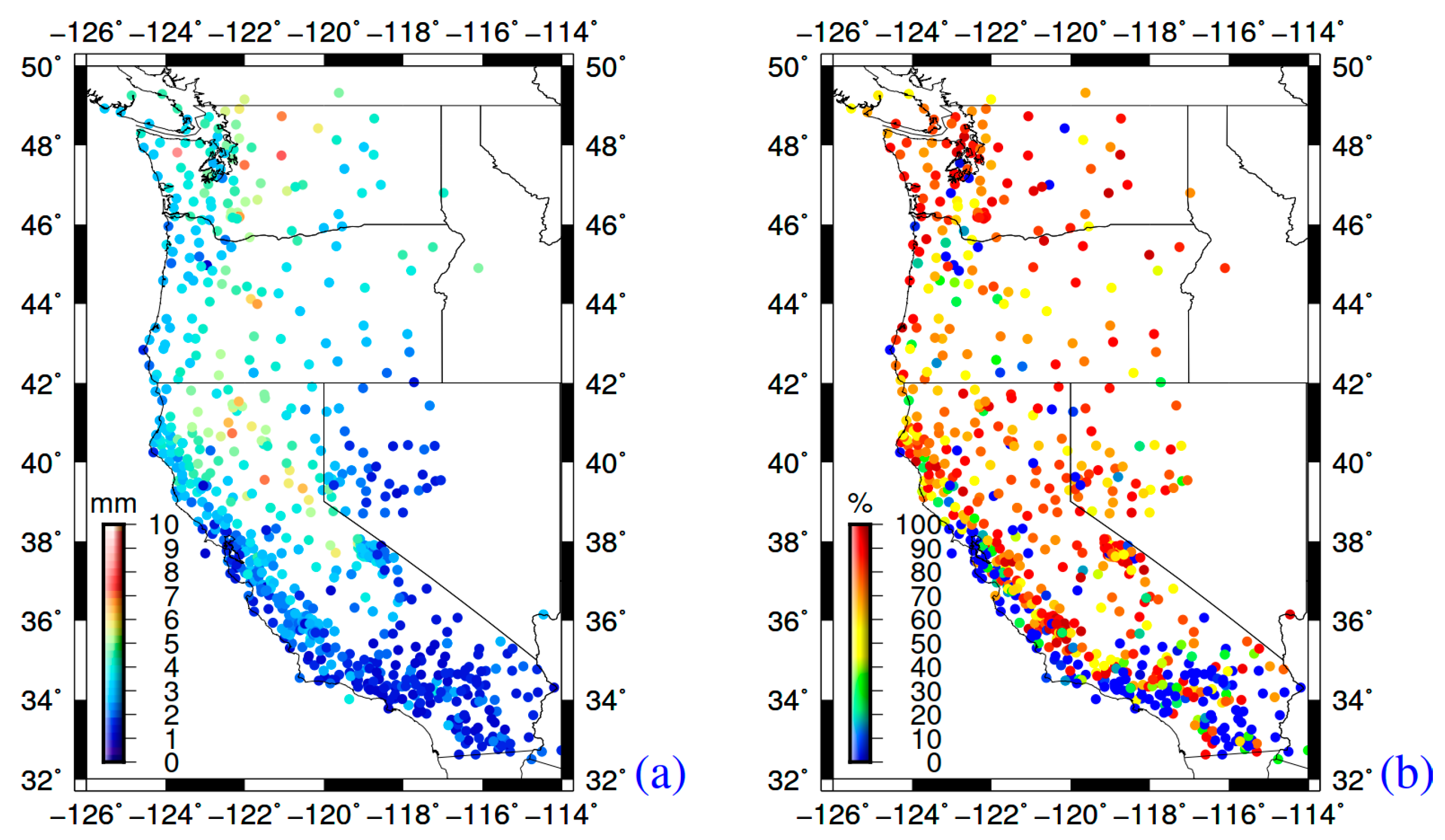
In the Pacific Rim of the western United States, there are a few GPS stations out of our study region and the annual vertical deformation amplitude of these GPS stations is generally smaller than 3 mm (
Figure 1). Considering that the error level of the GPS vertical deformations is at the same level of 2–3 mm [
26,
27,
28,
29], we discard these outside region GPS observations due to the fact it could bring larger errors into inverted results, which was shown in T5 and T6. Meanwhile, we set the inversion spatial resolution of water storage changes as 0.5° × 0.5° in the California sub-region, 1° × 1° in the Washington–Oregon sub-region, and 1° × 1° for the whole study region, based on the numbers of the observed GPS stations in the different study regions (
Figure 1 and
Figure 8). At last, we set the search radius as 3
(DLEF = 0.2), and inverted the water storage changes from such GPS vertical deformations.
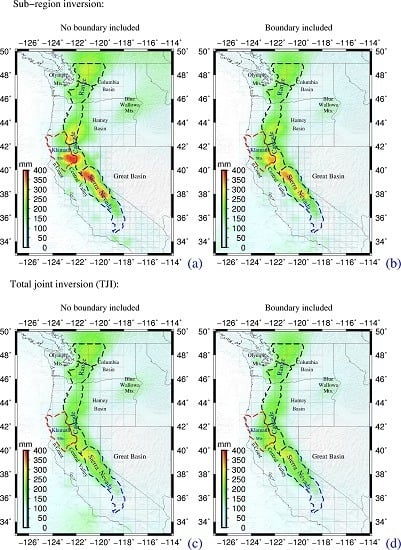
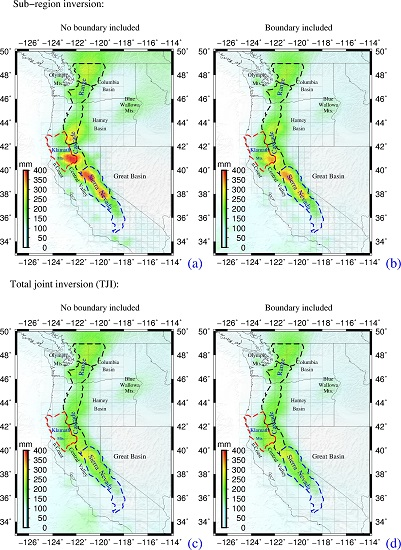
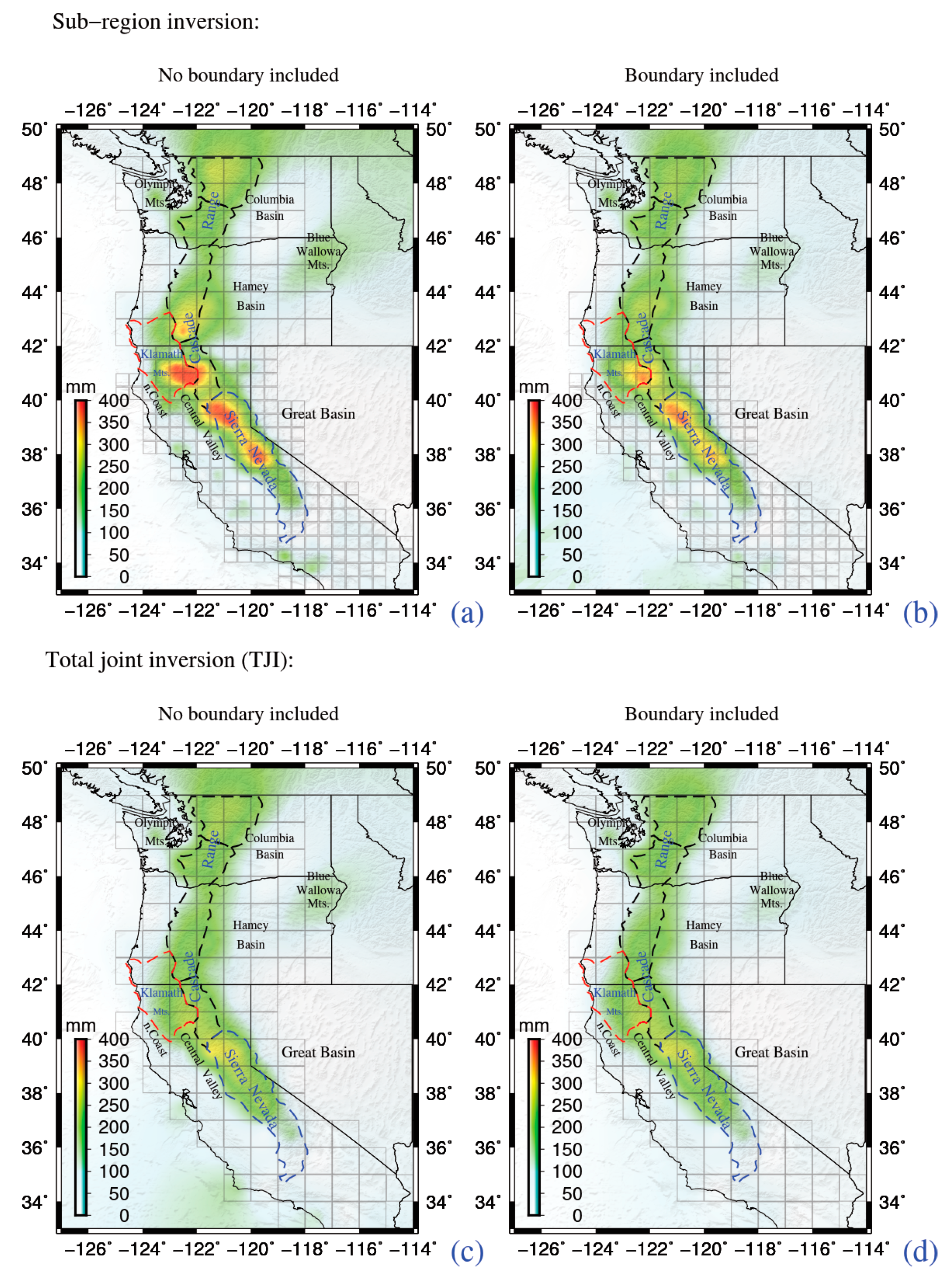
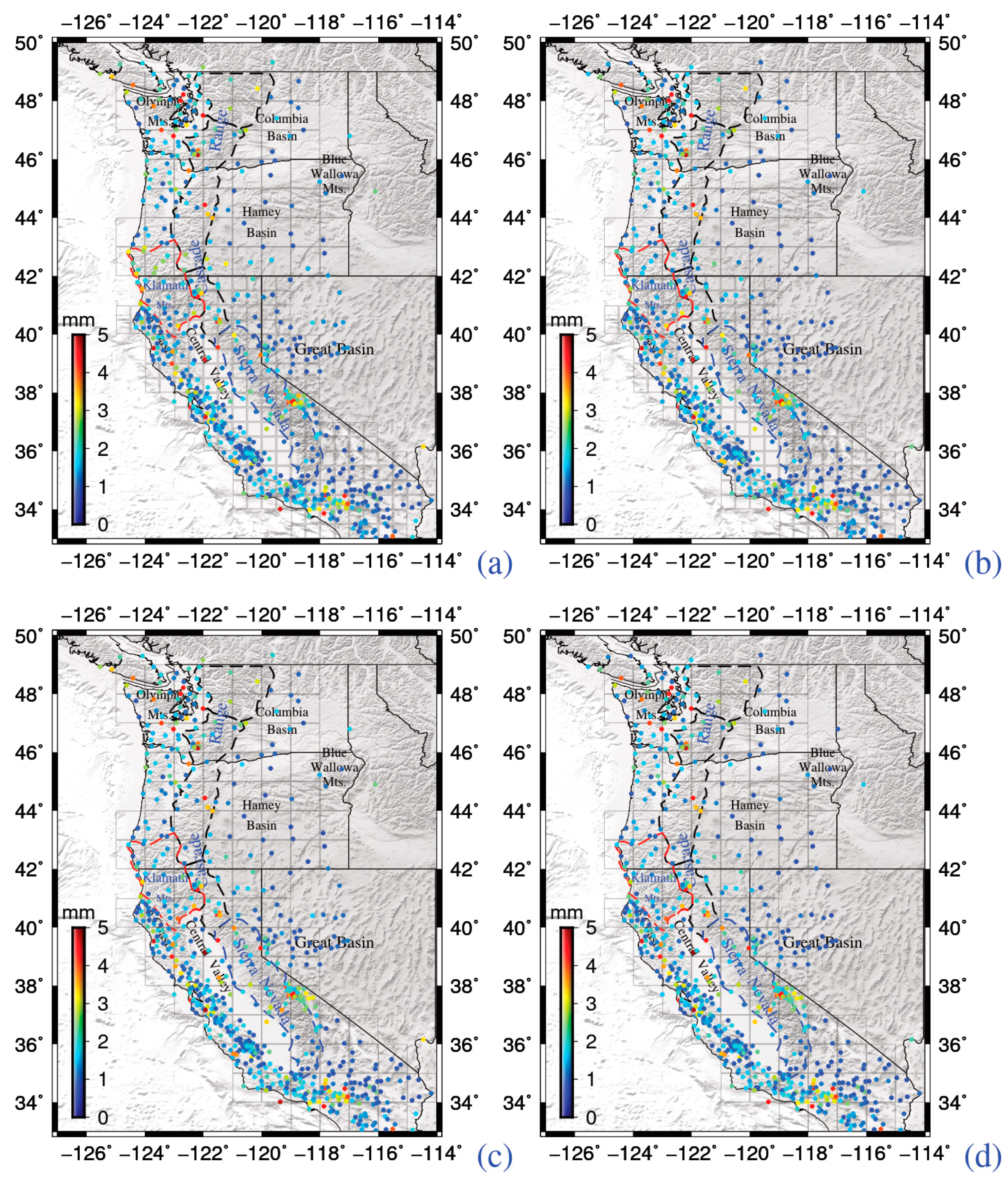
The seasonal water storage changes in the western Unite States inverted from the GPS vertical deformation data show the obvious annual amplitudes generally larger than 300 mm in the Cascade Range, Klamath mountains, and Sierra Nevada (
Figure 9). While in the valley and basin regions, such as Columbia and Harney Basin, the annual water storage amplitude is generally smaller than 100 mm. Our result is generally consistent with those from Argus et al. (2014) and Fu et al. (2015) in the spatial distribution characteristics.
Comparing the direct inversion results with that of the boundary-included inversion results (
Figure 9a,b and
Figure S6) separately, the direct inversion results are obviously larger than (about 50–80 mm in annual amplitudes) the boundary-included results in the boundary regions (e.g., Klamath Mountains, south Cascade Range and north Cascade Range ). However, in the center regions (e.g., Sierra Nevada and middle Cascade Range), the direct inversion results are similar with (about 10–30 mm larger in annual amplitudes) the boundary-included results. This is consistent with our simulation test results which show that the boundary included can only enhance about 1% of the VR in the center region. Meanwhile, the boundary-included water storage changes results, of 1° × 1° spatial resolution in the case of the Washington–Oregon sub-region, and 0.5° × 0.5° spatial resolution in the case of the California sub-region in the physiographic province Klamath Mountains (
Figure 9b), are approximate to the direct inversion results in the same region (
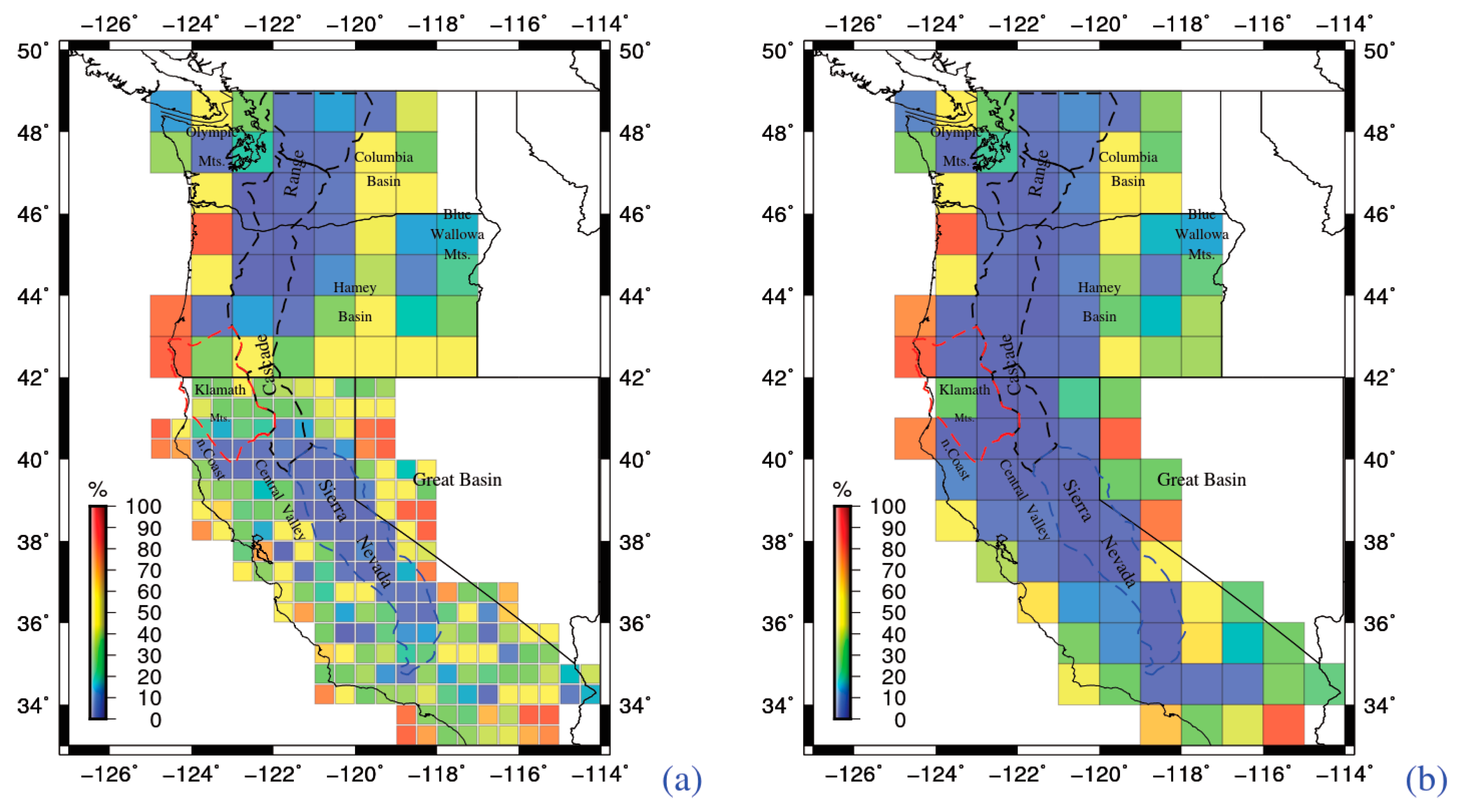
Figure 9c), where now as the center region of 1° × 1° spatial resolution in the case of the whole study region. This is consistent with our finding that the boundary-included results are more suitable than the direct inversion results, due to the latter critically overestimating the water storage changes in the boundary regions. Here, we also notice that in the boundary region, most of the direct inversion results are larger than those from boundary-included inversion. However, we still find that a few net grids’ water storages from direct inversion are smaller than that of the boundary-included inversion at the boundary of 0.5° × 0.5° spatial resolution in the case of the California sub-region, which may be sourced from the combined effect by GPS vertical deformations errors and the irregular space distribution of the GPS sites (some net grid of 0.5 × 0.5° spatial resolution has no GPS sites). For a better comparison between direct and boundary-included inversion results, we present the percentage of the residuals (between the two results) standard deviation to the boundary-included results standard deviation (more approximate to the true value than direct results) in
Figure 8. Furthermore, we counted the number of the grids of which the percentage is greater than 20%. Here, we see the grids of which the percentage is greater than 20% as the significant difference grids which are clearly above the GPS vertical deformation errors level. For the 0.5° × 0.5° spatial resolution case study in the California sub-region and the 1° × 1° spatial resolution case study in the Washington–Oregon sub-region, there are 65% grids which are of significant difference (the percentage is greater than 20% in
Figure 8). Moreover, for 1° × 1° in the whole study region, there are 47% grids which are of significant difference. It is obvious that these significant difference points are mainly located in the boundary region. Therefore, the boundary-included inversion can effectively improve the results when we use the GPS deformation to infer water storage changes. One may notice the difference between 65% and 47%. This is due to the grid number used in the different region especially in the boundary regions (e.g.,
Figure 8a,b).
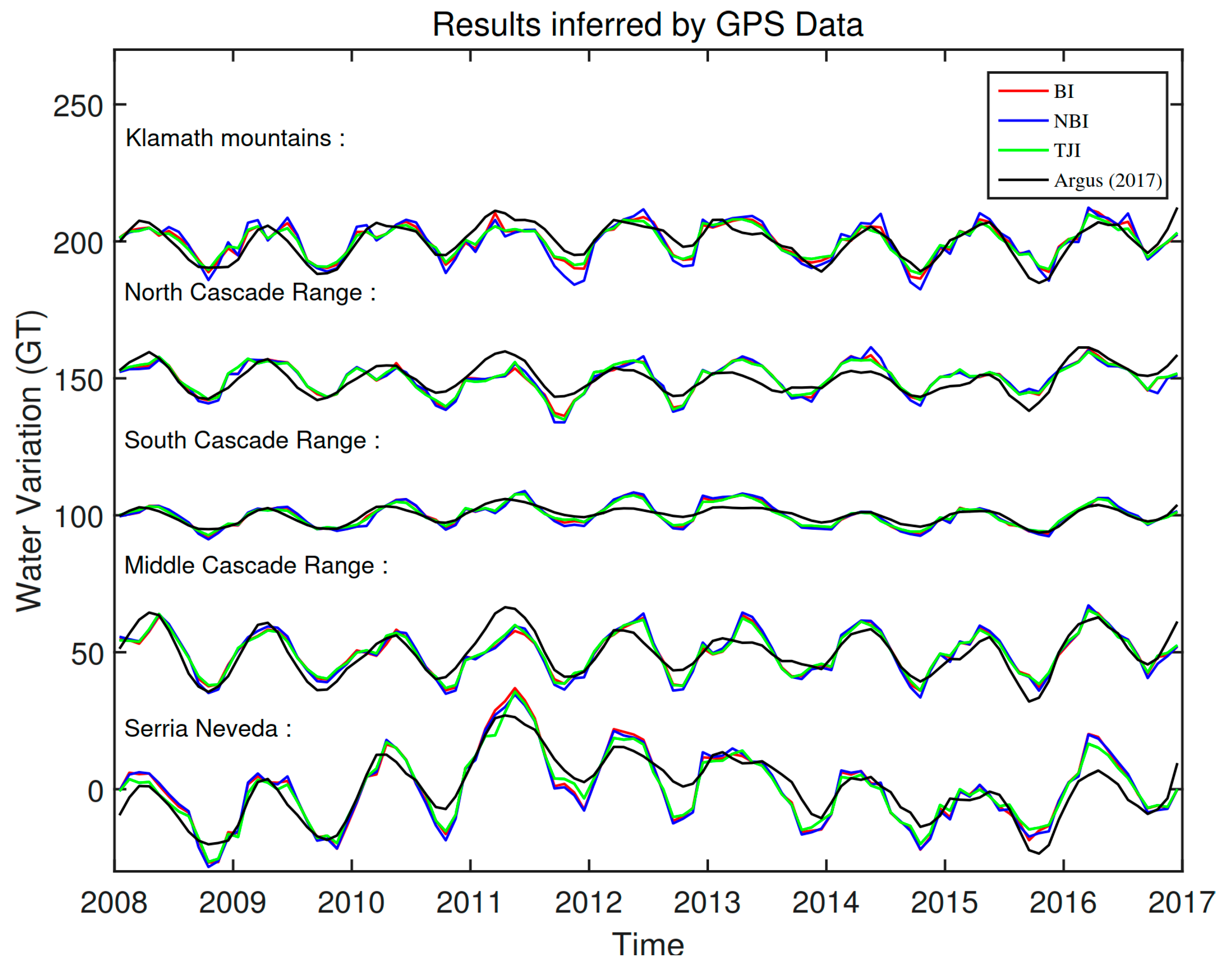
Furthermore, we compare the inverted total water storage changes by different inversion methods in three physiographic provinces, i.e., Klamath Mountains, Cascade Range and Sierra Nevada. Here, we take the total joint inversion results with the boundary included as the “true” value based on
Section 3.1, which the spatial resolution of the water storage changes is 1° × 1° for the whole study region. Then, we use this “true” value as the standard to evaluate if the sub-region inversion results have significant enhancements with our boundary-included inversion method. In
Figure 10, our boundary-included inversion results of the variance enhancement are about 16.0%, 11.4%, 9.5%, 2.1% and 0.5% in the Klamath Mountains (boundary region), north, south, and middle Cascade Range (north and south Cascade Range is the boundary region, most of middle Cascade Range is the inner region) and Sierra Nevada (inner region), respectively. The above results show that our boundary-included inversion method is powerful in the boundary regions, but similar to direct inversion results in the center region. This result is similar as our simulation test T6, which enhances the variance for about 14.3%, 9.7%, 7.6%, 1.9% and 0.2% in the similar case. We also notice that the enhancement (16.0%, 11.4% and 9.5%) of the inversion results with the boundary included by real GPS vertical deformation is slightly larger than that of the simulation results (14.3%, 9.7% and 7.6%), which further prove that the boundary-included inversion method has more advantages in the data with the true error environment.
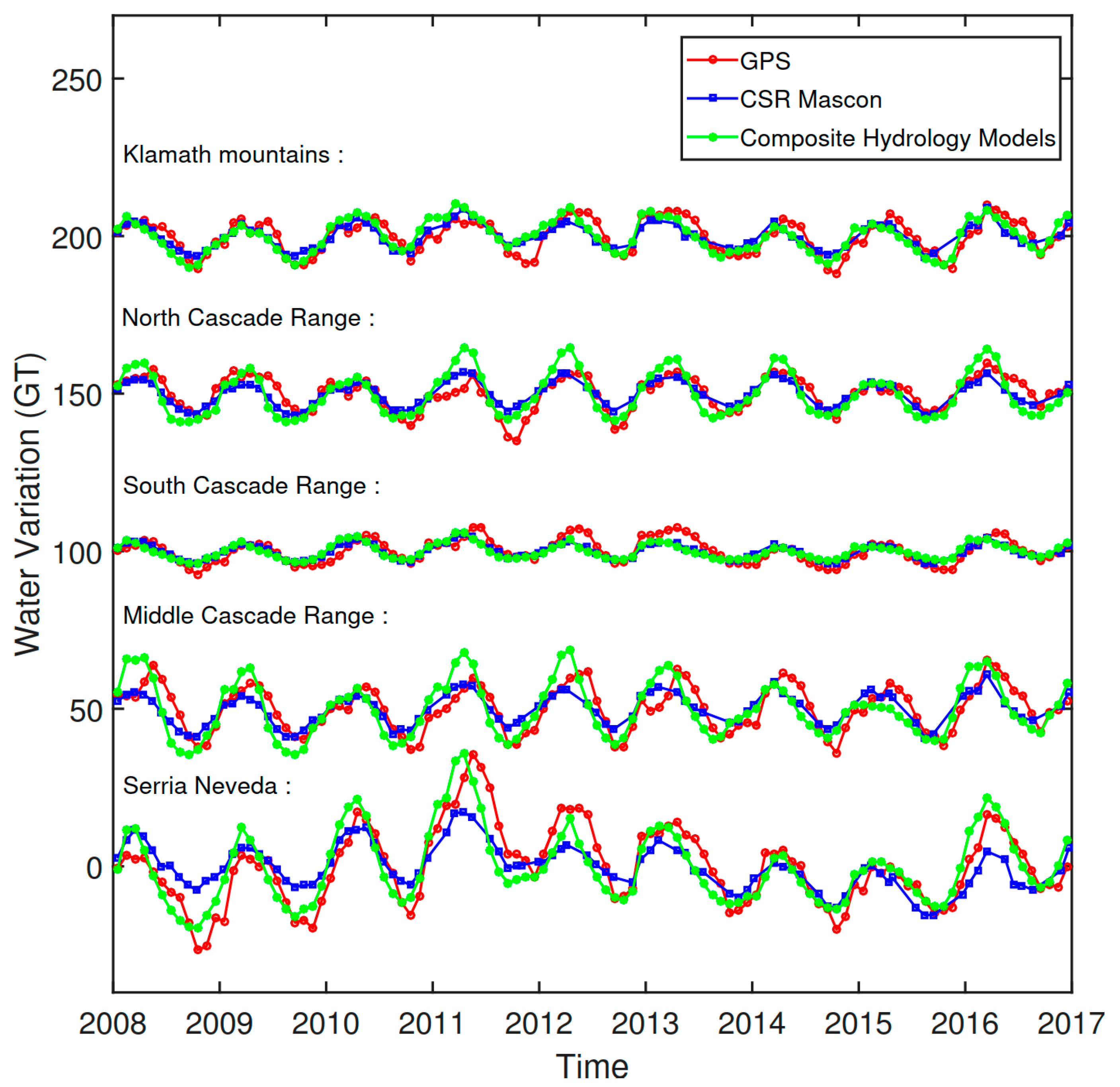
Finally, we compare our boundary-included inversion model results with the water storage changes derived from composite hydrology models [
30] and the GRACE CSR Mascon product (
Figure 11). The annual amplitude of the water storage changes by the different products (GRACE CSR Mascon, composite hydrology models, Argus et al. (2017) and our boundary-included model) in the physiographic provinces (Klamath Mountains, Cascade Range and Sierra Nevada) is shown in
Table 3. We that see our boundary-included model results are consistent with that of the composite hydrology models and Argus et al. (2017) on the whole. However, in the north Cascade Range (boundary region), the annual amplitude 7.2 Gt of our inversion results is slightly less than that of the composite hydrology model result of 8.6 Gt and larger than that of Argus et al. (2017)’s result of 5.7 Gt. Considering that most of the variance reduction between the vertical deformation calculated from composite hydrology models data and GPS vertical deformation can reach about 90% (
Figure 12b), their inversion result in this boundary region may be slightly underestimated. Moreover, in Sierra Nevada (the center of the California sub-region where the GPS sites are denser), the annual amplitude 12.3 Gt of our inversion results is similar to that of the composite hydrology model result of 12.5 Gt and slightly larger than that of Argus et al. (2017)’s result of 9.1 Gt. Here, most of the variance reduction between the vertical deformation calculated from the composite hydrology models data and the GPS vertical deformation can reach above 90% (
Figure 12b). Therefore, the smooth factor in the inversion model of Argus et al. (2017) may smooth the “local” water storage changes of the results, which may cause the slightly underestimated results for Sierra Nevada.
Furthermore, we noticed that the water storage changes inferred by the GPS vertical deformation are generally larger than that of the GRACE-CSR products (
Figure 11 and
Table 3). In addition, there is a slightly obvious difference between the water storage changes of the GPS vertical deformation inferred and the composite hydrological model. The reason is that the spatial resolution of the GRACE-CSR products is about 300 km, which is larger than that of the GPS vertical deformation and the composite hydrological models. Thus, the GRACE products can only show the “average” results in the 300 × 300 km spatial region, while the GPS and hydrological models can show more “local” results. Otherwise, the GPS vertical deformation signal has a lot of non-hydrological “errors”, such as orbit errors, thermal errors, monument errors, un-modeled troposphere and ionosphere errors, etc., which is not the true hydrology signal but taken as the hydrological signal. These “errors” will show as false local hydrological signals too. Composite hydrology models may have similar problems. These different “errors” in GRACE, GPS and hydrology models will cause the difference results between the directed or inverted water storage changes. Furthermore, we also notice that the phase of the water storage changes time series inferred by the GPS vertical deformations lags that of the hydrology models and GRACE-CSR products, obviously. This phase lag phenomenon is quite complex and important, and should be examined in the future.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}