Application of a Nighttime Fog Detection Method Using SEVIRI Over an Arid Environment



Abstract
1. Introduction
2. Materials and Methods
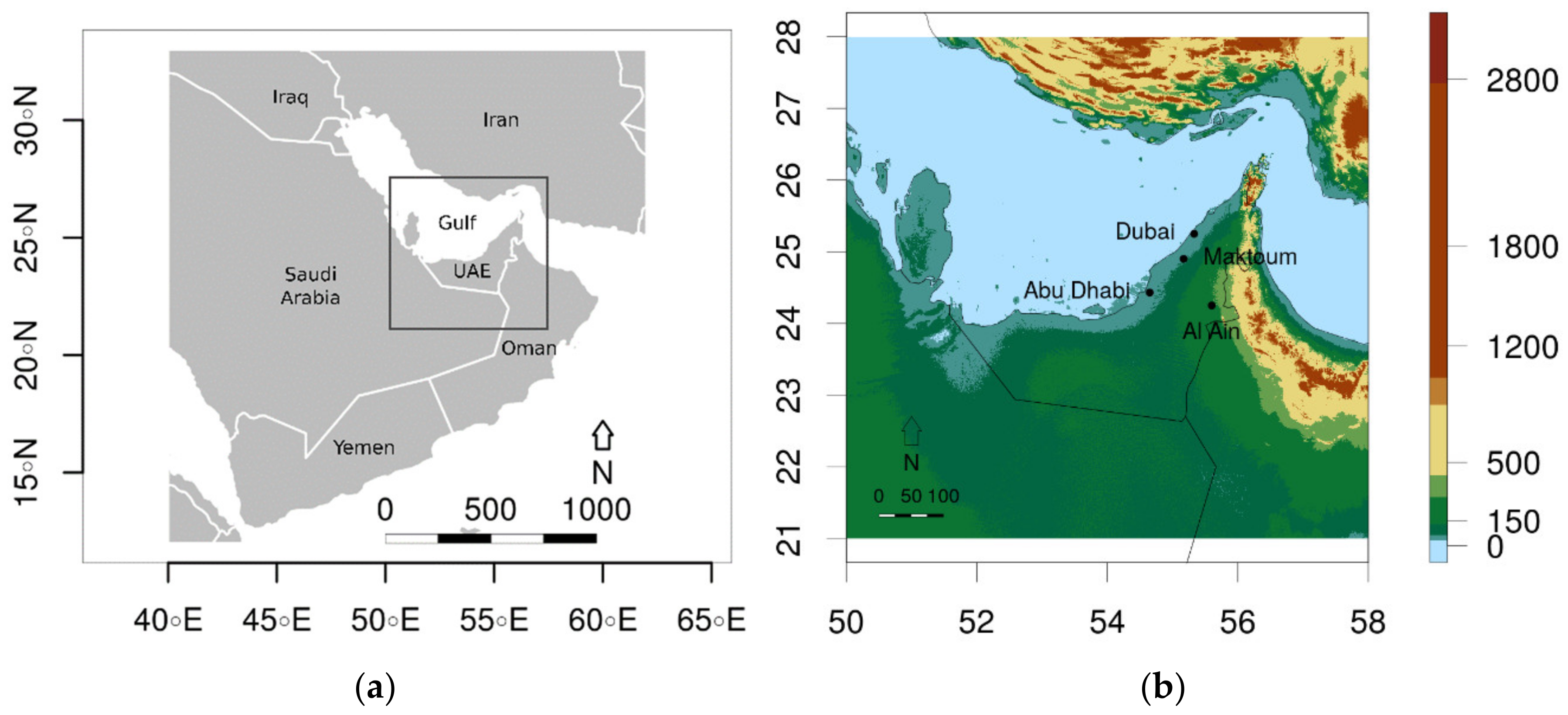
2.1. Study Area
2.2. Datasets
2.2.1. SEVIRI Data
2.2.2. METAR Data
2.2.3. ERA5 Data
2.3. Fog/Low Clouds Detection
2.4. Low Cloud Detection
2.5. Verification
3. Results and Discussion
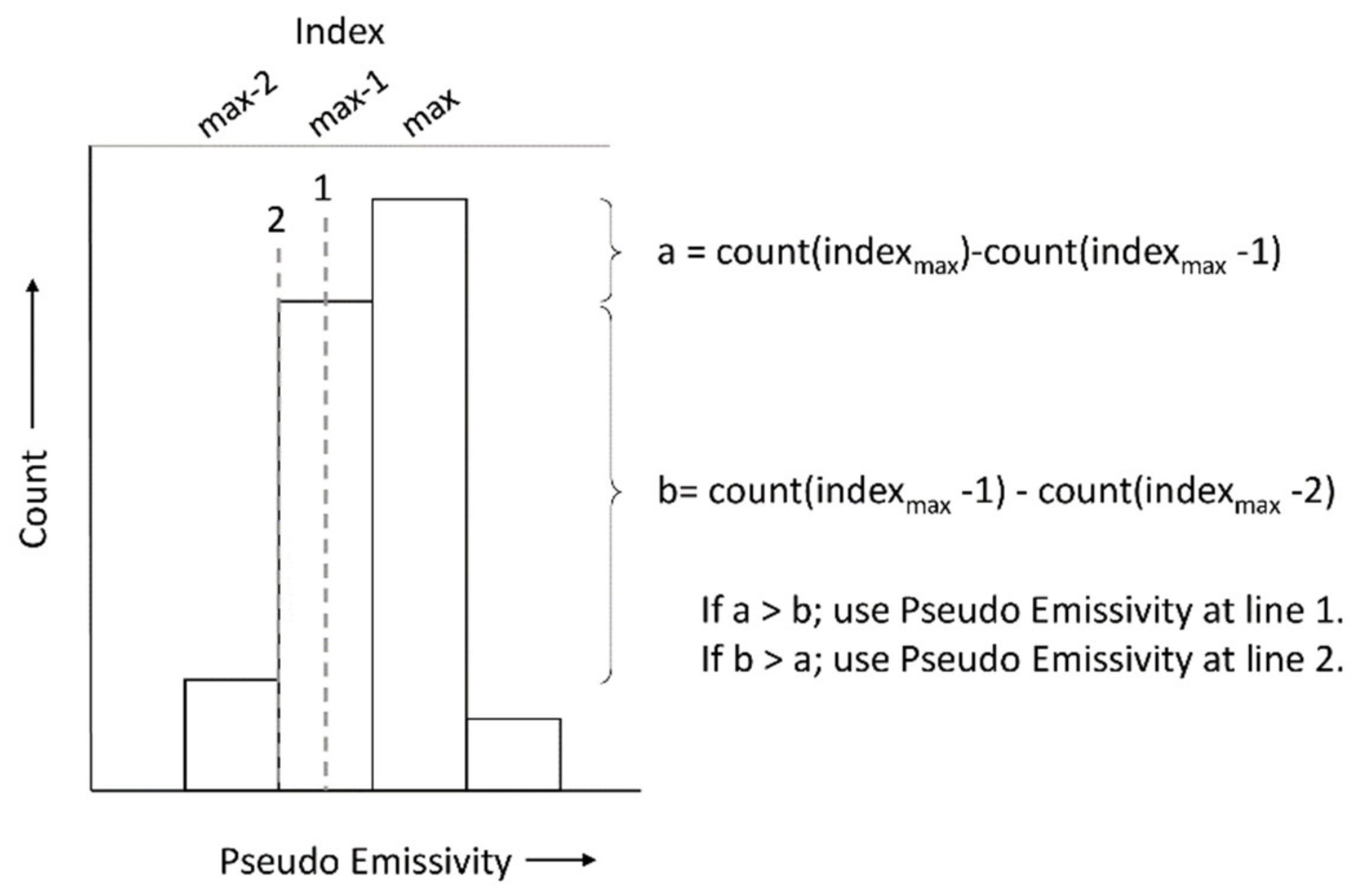
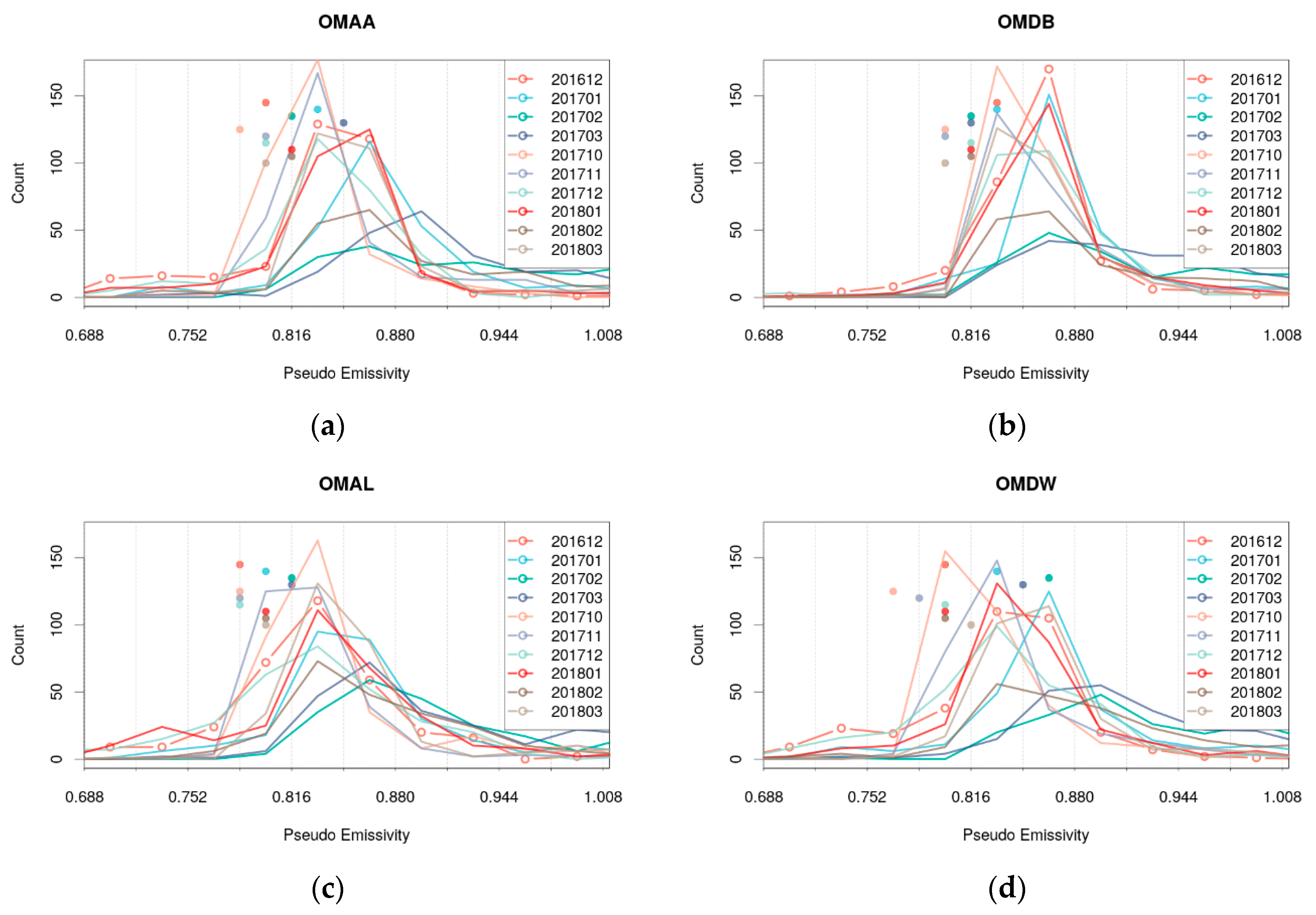
3.1. Histograms
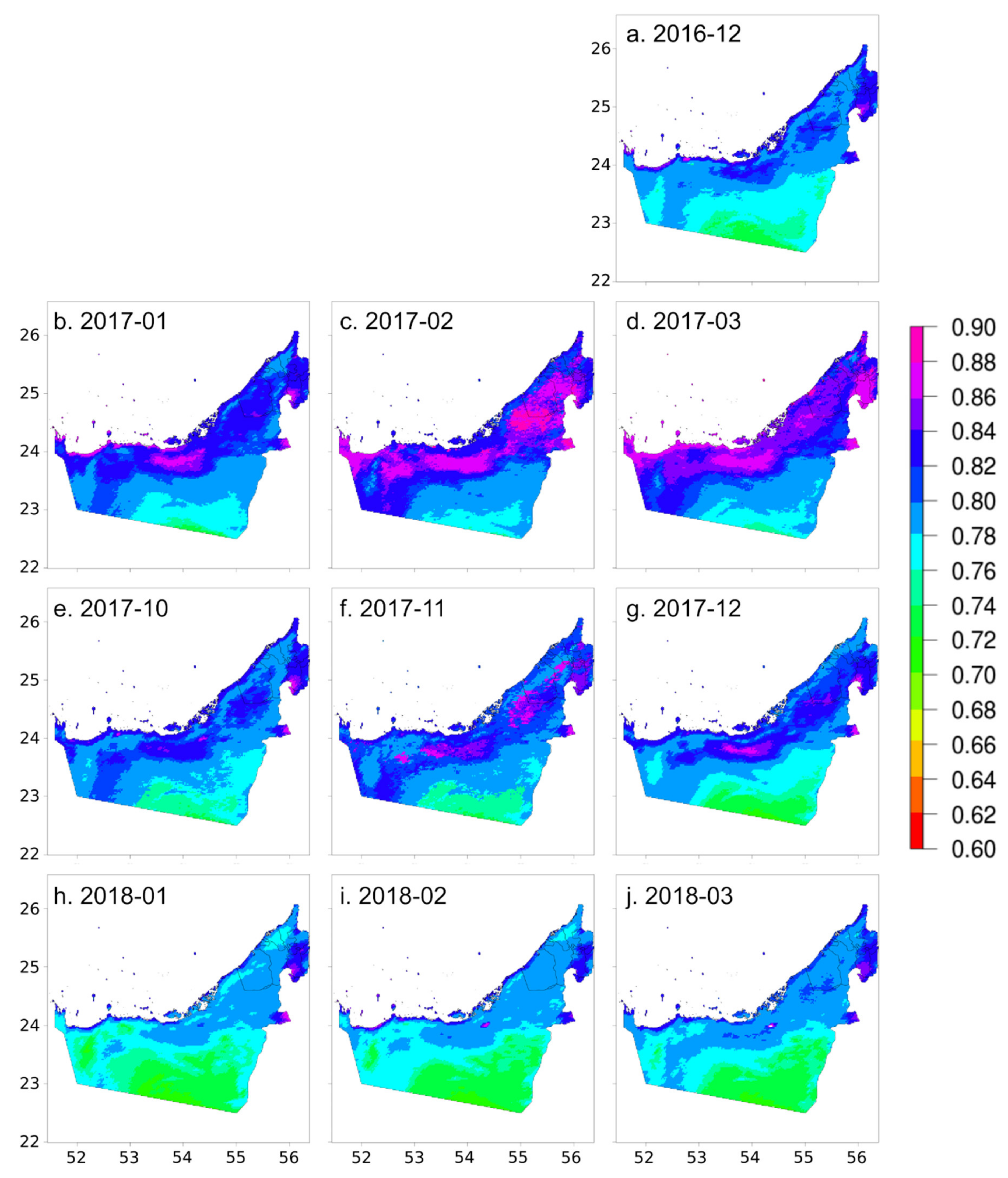
3.2. Monthly Threshold Maps: ems(3.9)
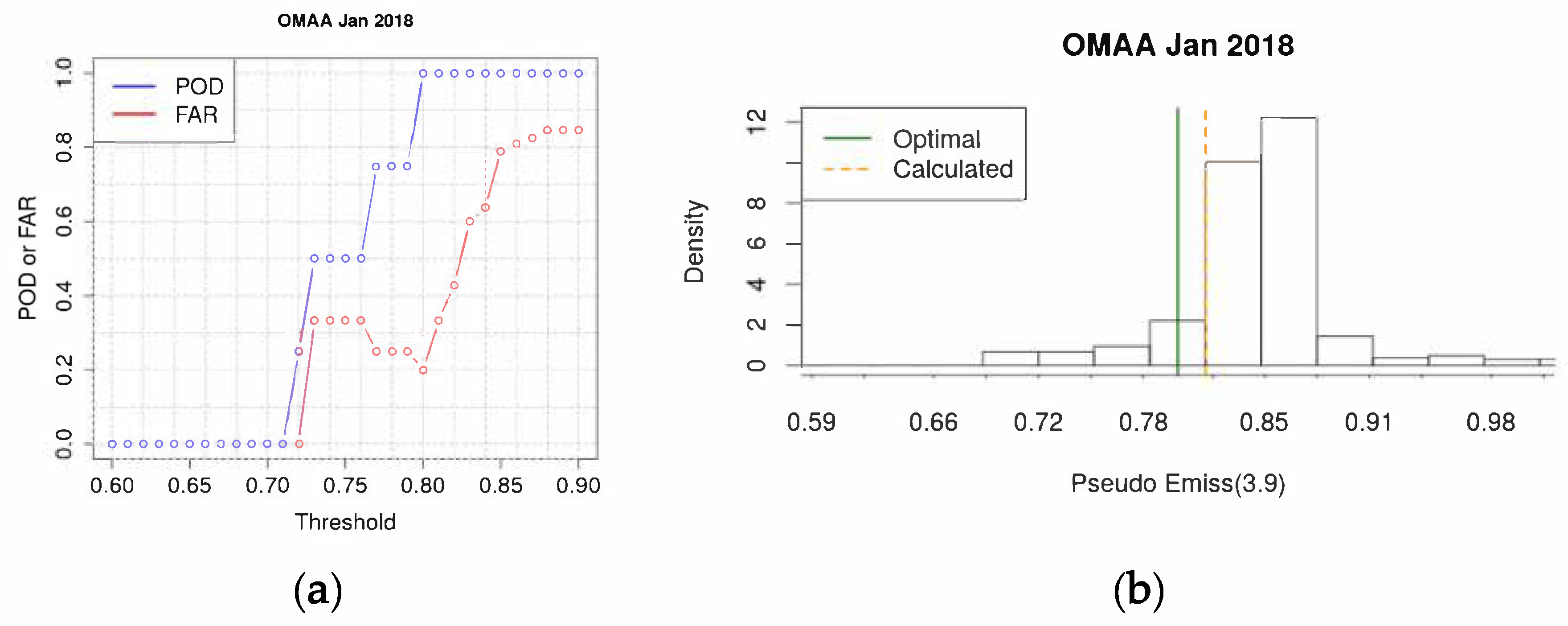
3.3. Assessment Over Two Fog Seasons
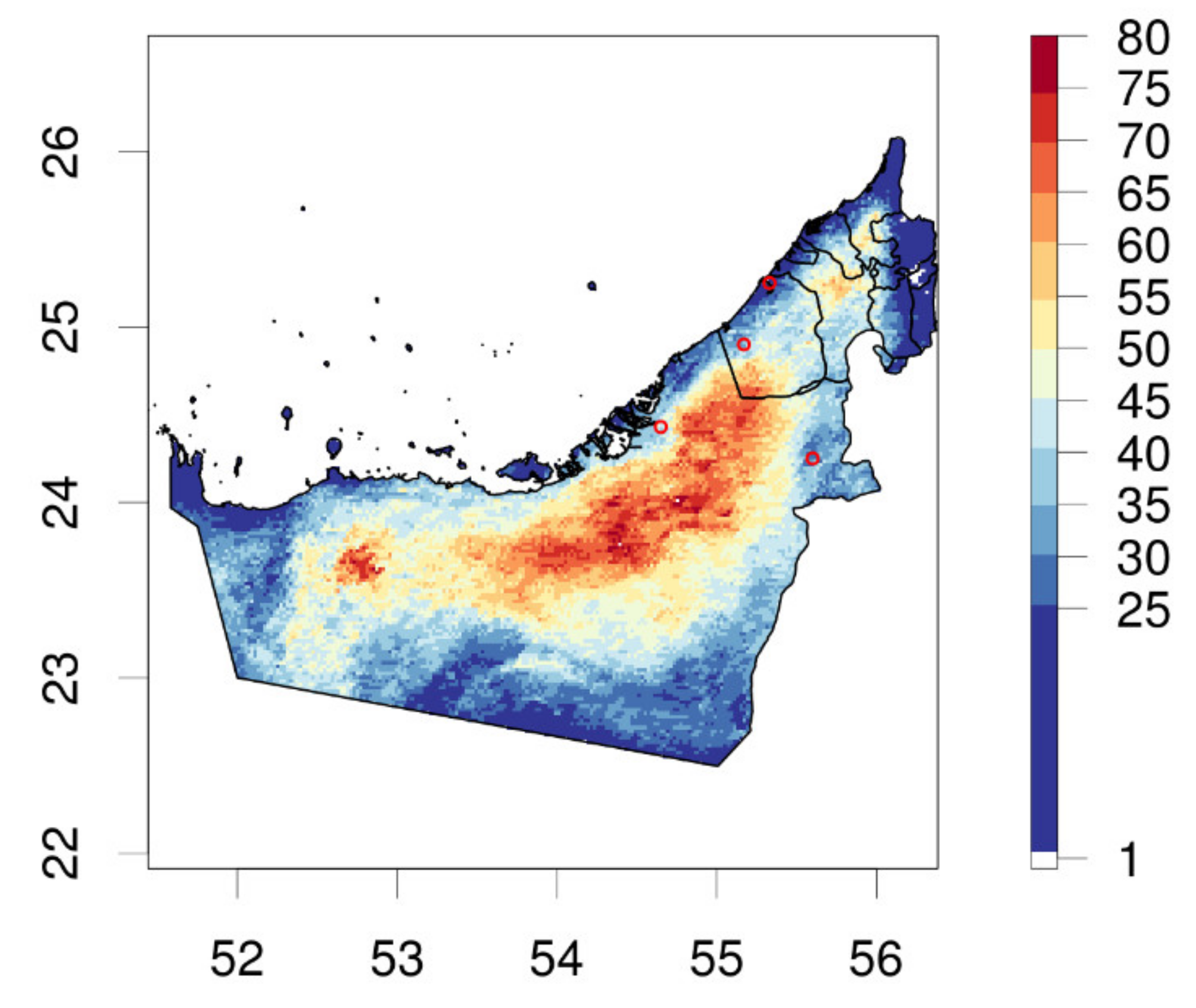
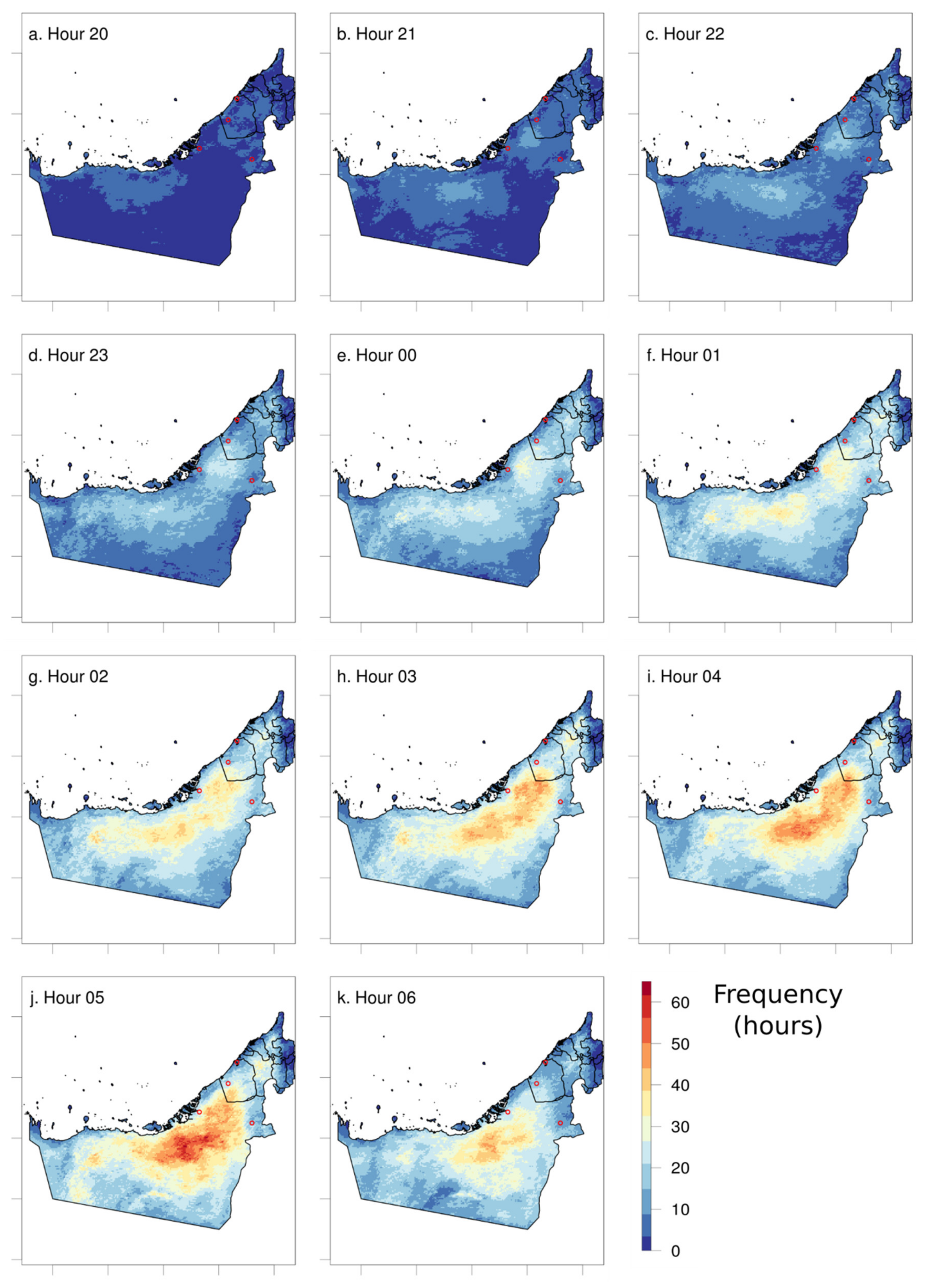
3.4. Analysis of Fog Frequency
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gultepe, I.; Sharman, R.; Williams, P.D.; Zhou, B.; Ellrod, G.; Minnis, P.; Trier, S.; Griffin, S.; Yum, S.S.; Gharabaghi, B.; et al. A Review of High Impact Weather for Aviation Meteorology. Pure Appl. Geophys. 2019, 176, 1869–1921. [Google Scholar] [CrossRef]
- Yousef, L.A.; Temimi, M.; Wehbe, Y.A. Total cloud cover climatology over the United Arab Emirates. Atmos. Sci. Lett. 2019, 20, 1–10. [Google Scholar] [CrossRef]
- Eyre, J.R.; Brownscombe, J.L.; Allam, R.J. Detection of fog at night using Advanced Very High Resolution Radiometer (AVHRR) imagery. Meteorol. Mag. 1984, 113, 266–271. [Google Scholar]
- Turner, J.; Allam, R.J.; Maine, D.R. A case-study of the detection of fog at night using channels 3 and 4 on the Advanced Very High-Resolution Radiometer (AVHRR). Meteorol. Mag. 1986, 115, 285–290. [Google Scholar]
- Cermak, J.; Bendix, J. Dynamical nighttime fog/low stratus detection based on Meteosat SEVIRI data: A feasibility study. Pure Appl. Geophys. 2007, 164, 1179–1192. [Google Scholar] [CrossRef]
- Cermak, J.; Bendix, J. A novel approach to fog/low stratus detection using Meteosat 8 data. Atmos. Res. 2008, 87, 279–292. [Google Scholar] [CrossRef]
- Nilo, S.T.; Romano, F.; Cermak, J.; Cimini, D.; Ricciardelli, E.; Cersosimo, A. Fog detection based on Meteosat Second Generation-Spinning enhanced visible and infrared imager high resolution visible channel. Remote Sens. 2018, 10, 541. [Google Scholar] [CrossRef]
- Cermak, J. Low clouds and fog along the South-Western African coast—Satellite-based retrieval and spatial patterns. Atmos. Res. 2012, 116, 15–21. [Google Scholar] [CrossRef]
- Andersen, H.; Cermak, J. First fully diurnal fog and low cloud satellite detection reveals life cycle in the Namib. Atmos. Meas. Tech. 2018, 11, 5461–5470. [Google Scholar] [CrossRef]
- Egli, S.; Thies, B.; Bendix, J. A hybrid approach for fog retrieval based on a combination of satellite and ground truth data. Remote Sens. 2018, 10, 628. [Google Scholar] [CrossRef]
- Calvert, C.; Pavolonis, M. GOES-R Advanced Baseline Imager (ABI) Algorithm Theoretical Basis Document for Low Cloud and Fog; University of Wisconsin-Madison Space Science and Engineering Center: Madison, WI, USA, 2010. [Google Scholar]
- Pavolonis, M.J.; Heidinger, A.K. Advancements in identifying cirrus and multilayered cloud systems from operational satellite imagers at night. Appl. Weather Satell. II 2005, 5658, 225. [Google Scholar] [CrossRef]
- Ouarda, T.B.M.J.; Charron, C.A. Evolution of the rainfall regime in the united arab emirates. J. Hydrol. 2014, 514, 258–270. [Google Scholar] [CrossRef]
- De Villiers, M.; Van Heerden, J. Fog at Abu Dhabi international airport. Weather 2007, 62, 209–214. [Google Scholar] [CrossRef]
- TS, M.; Temimi, M.; Ajayamohan, R.S.; Fonseca, R.; Weston, M.; Valappil, V. On the investigation of the typology of fog events in an arid environment and the link with climate patterns. Mon. Weather Rev. 2020. [Google Scholar] [CrossRef]
- Aldababseh, A.; Temimi, M. Analysis of the long-term variability of poor visibility events in the UAE and the link with climate dynamics. Atmosphere 2017, 8, 242. [Google Scholar] [CrossRef]
- Karagulian, F.; Temimi, M.; Ghebreyesus, D.; Weston, M.; Kondapalli, N.K.; Valappil, V.K.; Aldababesh, A.; Lyapustin, A.; Chaouch, N.; Hammadi, F.A.; et al. Analysis of a severe dust storm and its impact on air quality conditions using WRF-Chem modeling, satellite imagery, and ground observations. Air Qual. Atmos. Health 2019, 1–18. [Google Scholar] [CrossRef]
- Elhakeem, A.; Elshorbagy, W.; Bleninger, T. Long-term hydrodynamic modeling of the Arabian Gulf. Mar. Pollut. Bull. 2015, 94, 19–36. [Google Scholar] [CrossRef]
- Sheppard, C.; Al-Husiani, M.; Al-Jamali, F.; Al-Yamani, F.; Baldwin, R.; Bishop, J.; Benzoni, F.; Dutrieux, E.; Dulvy, N.K.; Durvasula, S.R.V.; et al. The Gulf: A young sea in decline. Mar. Pollut. Bull. 2010, 60, 13–38. [Google Scholar] [CrossRef]
- Bartok, J.; Bott, A.; Gera, M. Fog Prediction for Road Traffic Safety in a Coastal Desert Region: Improvement of Nowcasting Skills by the Machine-Learning Approach. Bound.-Layer Meteorol. 2012, 157, 501–516. [Google Scholar] [CrossRef]
- Weston, M.; Chaouch, N.; Valappil, V.; Temimi, M.; Ek, M.; Zheng, W. Assessment of the Sensitivity to the Thermal Roughness Length in Noah and Noah-MP Land Surface Model Using WRF in an Arid Region. Pure Appl. Geophys. 2018. [Google Scholar] [CrossRef]
- Temimi, M.; Fonseca, R.M.; Nelli, N.R.; Valappil, V.K.; Weston, M.J.; Thota, M.S.; Wehbe, Y.; Yousef, L. On the analysis of ground-based microwave radiometer data during fog conditions. Atmos. Res. 2020, 231, 104652. [Google Scholar] [CrossRef]
- Chaouch, N.; Temimi, M.; Weston, M.; Ghedira, H. Sensitivity of the meteorological model WRF-ARW to planetary boundary layer schemes during fog conditions in a coastal arid region. Atmos. Res. 2016, 187, 106–127. [Google Scholar] [CrossRef]
- Copernicus Climate Change Service (C3S). ERA5: Fifth Generation of ECMWF Atmospheric Reanalyses of the Global Climate, Copernicus Climate Change Service Climate Data Store (CDS). 2017. Available online: https://climate.copernicus.eu/climate-data-store (accessed on 4 May 2018).
- Hersbach, H.; Bell, B.; Berrisford, P.; Hornyi, A.; Sabater, J.M.; Nicolas, J.; Radu, R.; Schepers, D.; Simmons, A.; Soci, C.; et al. Global reanalysis: Goodbye ERA-Interim, hello ERA5. ECMWF Newsl. 2019, 17–24. [Google Scholar] [CrossRef]
- Cao, C.; Shao, X. Planck Function. Available online: https://ncc.nesdis.noaa.gov/data/planck.html (accessed on 26 September 2019).
- Ellrod, G.P. Estimation of low cloud base heights at night from satellite infrared and surface temperature data. Natl. Weather Dig. 2002, 26, 39–44. [Google Scholar]
- Dammann, K.; Mueller, J.; Hanson, C.; Gartner, V.; Flewin, J.; Williams, M. MSG level 1.5 image data format description. EumetsatDarmstadtTech 2005, 3, 1–129. [Google Scholar]
- Hulley, G.C.; Hook, S.J.; Abbott, E.; Malakar, N.; Islam, T.; Abrams, M. The ASTER Global Emissivity Dataset (ASTER GED): Mapping Earth’s emissivity at 100 meter spatial scale. Geophys. Res. Lett. 2015, 42, 7966–7976. [Google Scholar] [CrossRef]
- EUMETSAT. Best Practices for RGB Compositing of Multi-Spectral Imagery; User Service Division, EUMETSAT: Darmstadt, Germany, 2009; p. 8. [Google Scholar]
- Weston, M.J.; Temimi, M.; Nelli, N.R.; Fonseca, R.M. On the Analysis of the Low-Level Double Temperature Inversion Over the United Arab Emirates : A Case Study During April 2019. IEEE Geosci. Remote Sens. Lett. 2020. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| METAR Fog Yes | METAR Fog No | |
|---|---|---|
| SEVIRI fog yes | Hits | False Alarms |
| SEVIRI fog no | Misses | Correct Negative |
| OMAA | OMDB | OMAL | OMDW | |
|---|---|---|---|---|
| Statistic | ems(3.9)—Low Cloud | ems(3.9)—Low Cloud | ems(3.9)—Low Cloud | ems(3.9)—Low Cloud |
| Total Hits | 26 | 10 | 20 | 23 |
| Total Miss | 6 | 2 | 4 | 7 |
| Total False Alarms | 17 | 10 | 10 | 18 |
| POD | 0.81 | 0.83 | 0.83 | 0.77 |
| FAR | 0.40 | 0.50 | 0.33 | 0.44 |
| Bias score | 1.34 | 1.66 | 1.25 | 1.36 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weston, M.; Temimi, M. Application of a Nighttime Fog Detection Method Using SEVIRI Over an Arid Environment. Remote Sens. 2020, 12, 2281. https://doi.org/10.3390/rs12142281
Weston M, Temimi M. Application of a Nighttime Fog Detection Method Using SEVIRI Over an Arid Environment. Remote Sensing. 2020; 12(14):2281. https://doi.org/10.3390/rs12142281
Chicago/Turabian StyleWeston, Michael, and Marouane Temimi. 2020. "Application of a Nighttime Fog Detection Method Using SEVIRI Over an Arid Environment" Remote Sensing 12, no. 14: 2281. https://doi.org/10.3390/rs12142281
APA StyleWeston, M., & Temimi, M. (2020). Application of a Nighttime Fog Detection Method Using SEVIRI Over an Arid Environment. Remote Sensing, 12(14), 2281. https://doi.org/10.3390/rs12142281