An Adaptive and Extensible System for Satellite-Based, Large Scale Burnt Area Monitoring in Near-Real Time


Abstract
1. Introduction
2. Materials and Methods
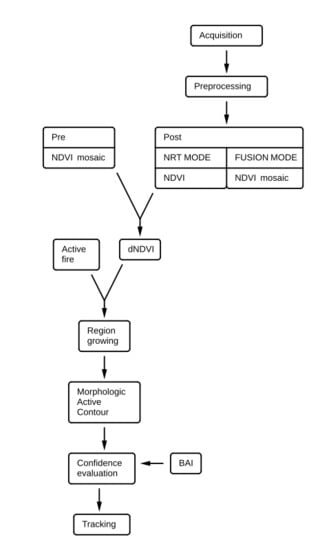
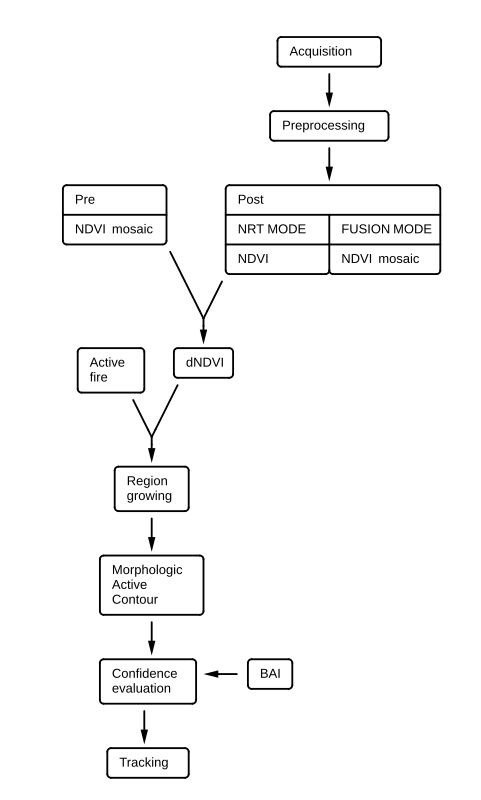
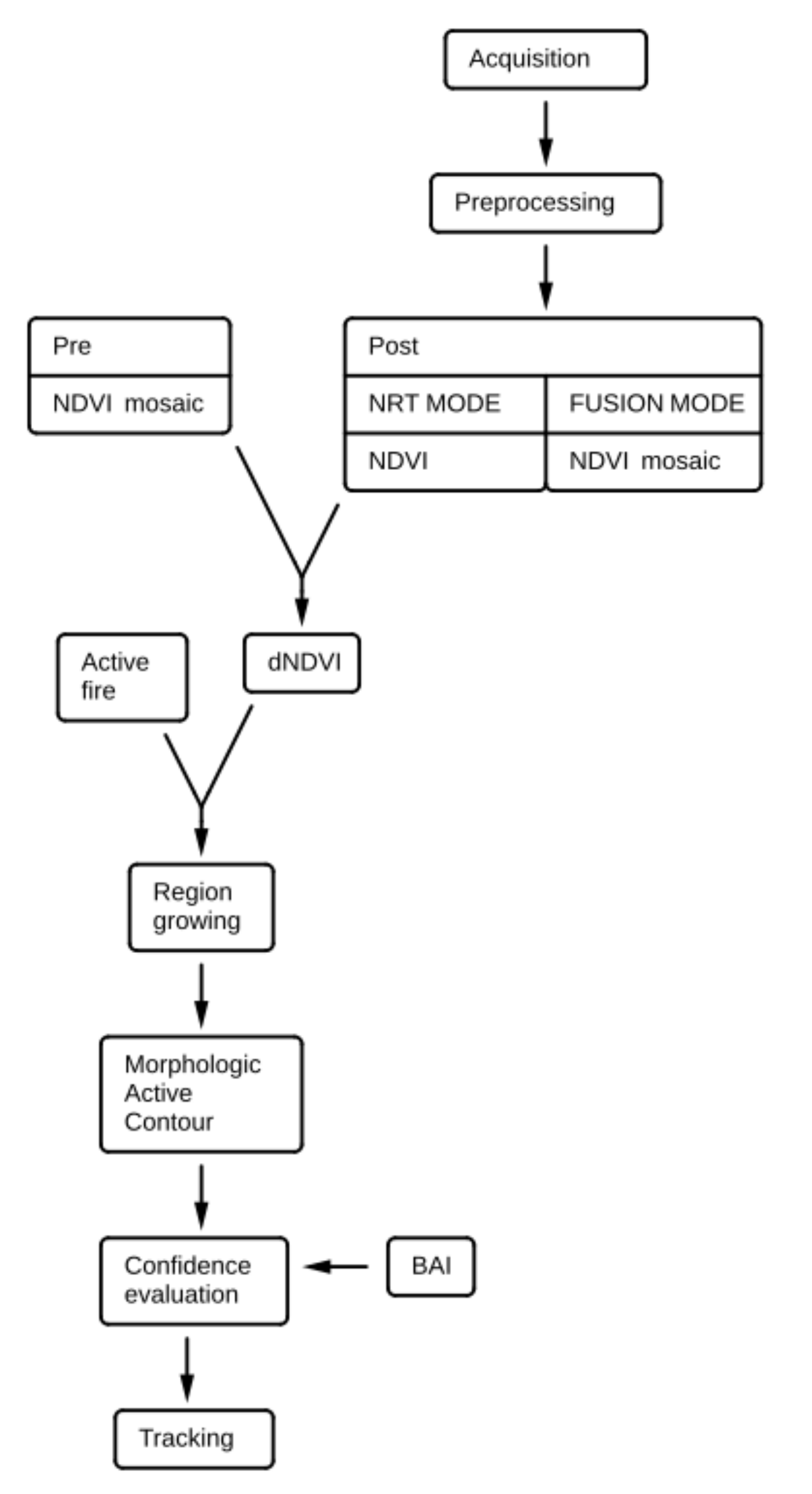
2.1. Description of the Methodology
2.1.1. Acquisition and Preprocessing
2.1.2. Preparation of Index Mosaics
2.1.3. Generation of Differential Index Information
2.1.4. Determination of Regions of Interest
2.1.5. Derivation Burnt Area Perimeters through Morphological Snakes
2.1.6. Confidence evaluation
2.1.7. Final Steps and Tracking
2.2. Validation Procedure
- True positives: The percentage of true positives (TP) refers to the area classified by the presented methodology as well as the reference data as being burnt, in comparison to the total burnt area size in the reference.
- False negatives: Analogously, the term false negatives (FN) refers to the total area which was not classified as burnt by the presented methodology, but was classified as such in the reference. The size of this area is set in relation to the total burnt area size in the reference.
- False positives: The term of false positives (FP) addresses the total area classified as burnt in the DLR result, but not classified as such in the reference area. The number is given in relation to the total burnt area size in the reference.
3. Results
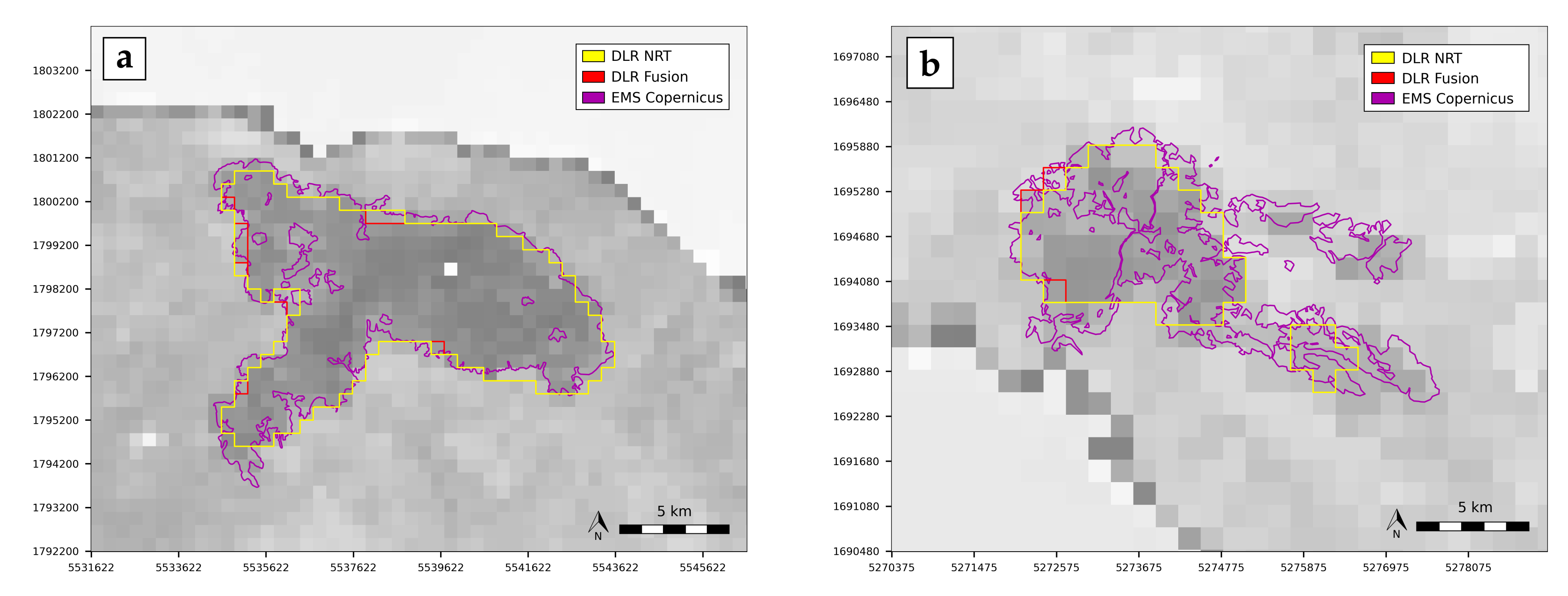
3.1. Single Incident Analysis
3.2. Large Scale Analysis
3.3. Timeliness Analysis
3.4. Operational Details of the Current Implementation
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bowman, D.; Balch, J.; Artaxo, P.; Bond, W.; Carlson, J.; Cochrane, M.; D’Antonio, C.; DeFries, R.; Doyle, J.; Harrison, S. Fire in the Earth system. Science 2009, 324, 481–484. [Google Scholar] [CrossRef] [PubMed]
- Viegas, D.; Ribeiro, L.; Viegas, M.; Pita, L.; Rossa, C. Impacts of fire on society: Extreme fire propagation issues. In Earth Observation of Wildland Fires in Mediterranean Ecosystems; Springer: Berlin/Heidelberg, Germany, 2009; pp. 97–109. [Google Scholar]
- Flannigan, M.; Stocks, B.; Weber, M. Fire regimes and climatic change in Canadian forests. In Fire and Climatic Change in Temperate Ecosystems of the Western Americas; Springer: New York, NY, USA, 2003; pp. 97–119. [Google Scholar]
- Kasischke, E.; Stocks, B. Fire, Climate Change, and Carbon Cycling in the Boreal Forest; Springer Science & Business Media: New York, NY, USA, 2012; Volume 138. [Google Scholar]
- Jørgensen, S. Ecosystem Ecology; Academic Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Withey, K.; Berenguer, E.; Palmeira, A.; Espírito-Santo, F.; Lennox, G.; Silva, C.; Aragão, L.; Ferreira, J.; França, F.; Malhi, Y.; et al. Quantifying immediate carbon emissions from El Niño-mediated wildfires in humid tropical forests. Philos. Trans. R. Soc. B Biol. Sci. 2018, 373, 20170312. [Google Scholar] [CrossRef]
- Surawski, N.; Sullivan, A.; Roxburgh, S.; Polglase, P. Estimates of greenhouse gas and black carbon emissions from a major Australian wildfire with high spatiotemporal resolution. J. Geophys. Res. Atmos. 2016, 121, 9892–9907. [Google Scholar] [CrossRef]
- Wotton, B. Interpreting and using outputs from the Canadian Forest Fire Danger Rating System in research applications. Environ. Ecol. Stat. 2009, 16, 107–131. [Google Scholar] [CrossRef]
- Chuvieco, E.; Mouillot, F.; van der Werf, G.; San Miguel, J.; Tanasse, M.; Koutsias, N.; García, M.; Yebra, M.; Padilla, M.; Gitas, I. Historical background and current developments for mapping burned area from satellite earth observation. Remote Sens. Environ. 2019, 225, 45–64. [Google Scholar] [CrossRef]
- Giglio, L.; Boschetti, L.; Roy, D.; Humber, M.; Justice, C. The Collection 6 MODIS burned area mapping algorithm and product. Remote Sens. Environ. 2018, 217, 72–85. [Google Scholar] [CrossRef]
- Giglio, L.; Justice, C.; Boschetti, L.; Roy, D. MCD64A1 MODIS/TERRA + AQUA Burned Area Monthly l3 Global 500 m Sin Grid v006 [Data Set]; NASA EOSDIS Land Processes DAAC: Sioux Falls, SD, USA, 2015. [Google Scholar]
- Chuvieco, E.; Pettinari, M.; Lizundia-Loiola, J.; Storm, T.; Padilla Parellada, M. ESA Fire Climate Change Initiative (Fire_cci): MODIS Fire_cci Burned Area Pixel Product, version 5.1; Centre for Environmental Data Analysis: Didcot, UK, 2018. [Google Scholar] [CrossRef]
- Lizundia-Loiola, J.; Otón, G.; Ramo, R.; Chuvieco, E. A spatio-temporal active-fire clustering approach for global burned area mapping at 250 m from MODIS data. Remote Sens. Environ. 2020, 236, 111493. [Google Scholar] [CrossRef]
- Roy, D.; Jin, Y.; Lewis, P.; Justice, C. Prototyping a global algorithm for systematic fire-affected area mapping using MODIS time series data. Remote Sens. Environ. 2005, 97, 137–162. [Google Scholar] [CrossRef]
- Zhang, H.; Roy, D.; Yan, L.; Li, Z.; Huang, H.; Vermote, E.; Skakun, S.; Roger, J.-C. Characterization of Sentinel-2A and Landsat-8 top of atmosphere, surface, and nadir BRDF adjusted reflectance and NDVI differences. Remote Sens. Environ. 2018, 215, 482–494. [Google Scholar] [CrossRef]
- Roy, D.; Lewis, P.; Justice, C. Burned area mapping using multi-temporal moderate spatial resolution data—A bi-directional reflectance model-based expectation approach. Remote Sens. Environ. 2002, 83, 263–286. [Google Scholar] [CrossRef]
- Giglio, L.; Loboda, T.; Roy, D.; Quayle, B.; Justice, C. An active-fire based burned area mapping algorithm for the MODIS sensor. Remote Sens. Environ. 2009, 113, 408–420. [Google Scholar] [CrossRef]
- San-Miguel-Ayanz, J.; Schulte, E.; Schmuck, G.; Camia, A.; Strobl, P.; Libertà, G.; Giovando, C.; Boca, R.; Sedano, F.; Kempeneers, P.; et al. Comprehensive monitoring of wildfires in europe: The European Forest Fire Information System (EFFIS). In Approaches to Managing Disaster—Assessing Hazards, Emergencies and Disaster Impacts; Tiefenbacher, J., Ed.; IntechOpen: London, UK, 2012; pp. 87–105. ISBN 978-953-51-0294-6. [Google Scholar]
- Fraser, R.; Li, Z.; Cihlar, J. Hotspot and NDVI differencing synergy (HANDS): A new technique for burned area mapping over boreal forest. Remote Sens. Environ. 2000, 74, 362–376. [Google Scholar] [CrossRef]
- Li, Z.; Nadon, S.; Cihlar, J.; Stocks, B. Satellite-based mapping of Canadian boreal forest fires: Evaluation and comparison of algorithms. Int. J. Remote Sens. 2000, 21, 3071–3082. [Google Scholar] [CrossRef]
- Pu, R.; Gong, P.; Li, Z.; Scarborough, J. A dynamic algorithm for wildfire mapping with NOAA/AVHRR data. Int. J. Wildland Fire 2004, 13, 275–285. [Google Scholar] [CrossRef]
- Gong, P.; Pu, R.; Li, Z.; Scarborough, J.; Clinton, N.; Levien, L. An integrated approach to wildland fire mapping of California, USA using NOAA/AVHRR data. Photogramm. Eng. Remote Sens. 2006, 72, 139–150. [Google Scholar] [CrossRef]
- Ramo, R.; Chuvieco, E. Developing a random forest algorithm for MODIS global burned area classification. Remote Sens. 2017, 9, 1193. [Google Scholar] [CrossRef]
- Petropoulos, G.P.; Kontoes, C.; Keramitsoglou, I. Burnt area delineation from a uni-temporal perspective based on Landsat TM imagery classification using support vector machines. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 70–80. [Google Scholar] [CrossRef]
- Pinto, M.; Libonati, R.; Trigo, R.; Trigo, I.; DaCamara, C. A deep learning approach for mapping and dating burned areas using temporal sequences of satellite images. ISPRS J. Photogramm. Remote Sens. 2020, 160, 260–274. [Google Scholar] [CrossRef]
- Chan, T.; Vese, L. An active contour model without edges. In International Conference on Scale-Space Theories in Computer Vision; Springer: Berlin/Heidelberg, Germany, 1999; pp. 141–151. [Google Scholar]
- MODIS Characterization Support Team (MCST). MODIS Characterization Support Team (MCST). MODIS 250m Calibrated Radiances Product. In NASA MODIS Adaptive Processing System; Goddard Space Flight Center: Greenbelt, MD, USA, 2017. [Google Scholar] [CrossRef]
- Giglio, L.; Justice, C. MOD14A2 MODIS/Terra Thermal Anomalies/Fire 8-Day L3 Global 1km SIN Grid V006 [Data set], 2015, NASA EOSDIS Land Processes DAAC. Available online: https://doi.org/10.5067/MODIS/MOD14A2.006 (accessed on 4 March 2020).
- NASA Direct Readout. CREFL Version 1.7.1 Released—12/9/2010. Available online: https://directreadout.sci.gsfc.nasa.gov/?id=dspContent&cid=91 (accessed on 6 April 2020).
- Vermote, E. MOD09Q1 MODIS/Terra Surface Reflectance 8-Day L3 Global 250m SIN Grid V006 [Data set], 2015, NASA EOSDIS Land Processes DAAC. Available online: https://doi.org/10.5067/MODIS/MOD09Q1.006 (accessed on 4 March 2020).
- Platnick, S.; Meyer, K.; King, M.; Wind, G.; Amarasinghe, N.; Marchant, B.; Arnold, G.; Zhang, Z.; Hubanks, P.; Holz, R. The MODIS cloud optical and microphysical products: Collection 6 updates and examples from Terra and Aqua. IEEE Trans. Geosci. Remote Sens. 2016, 55, 502–525. [Google Scholar] [CrossRef]
- EUMETSAT. CODA (Copernicus Online Data Access). Available online: https://coda.eumetsat.int/#/home (accessed on 6 April 2020).
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The global monitoring for environment and security (GMES) sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Bossard, M.; Feranec, J.; Otahel, J. CORINE Land Cover Technical Guide: Addendum 2000. 2000. Available online: https://www.eea.europa.eu/publications/tech40add (accessed on 6 April 2020).
- Friedl, M.; Sulla-Menashe, D. MCD12Q1 MODIS/Terra+Aqua Land Cover Type Yearly L3 Global 500m SIN Grid V006 [Data set], 2019, NASA EOSDIS Land Processes DAAC. Available online: https://doi.org/10.5067/MODIS/MCD12Q1.006 (accessed on 4 March 2020).
- Rouse, J.; Haas, R.; Schell, J.; Deering, D. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; Prog. Rep. RSC 1978-1; Remote Sensing Center, Texas A&M Univ.: College Station, TX, USA, 1973. [Google Scholar]
- Chuvieco, E.; Martin, M.; Palacios, A. Assessment of different spectral indices in the red-near-infrared spectral domain for burned land discrimination. Int. J. Remote Sens. 2002, 23, 5103–5110. [Google Scholar] [CrossRef]
- Escuin, S.; Navarro, R.; Fernandez, P. Fire severity assessment by using NBR (Normalized Burn Ratio) and NDVI (Normalized Difference Vegetation Index) derived from Landsat TM/ETM images. Int. J. Remote Sens. 2008, 29, 1053–1073. [Google Scholar] [CrossRef]
- Pereira, J. A comparative evaluation of NOAA/AVHRR vegetation indexes for burned surface detection and mapping. IEEE Trans. Geosci. Remote Sens. 1999, 37, 217–226. [Google Scholar] [CrossRef]
- Key, C.; Benson, N. Measuring and remote sensing of burn severity. In Proceedings Joint Fire Science Conference and Workshop; University of Idaho: Moscow, ID, USA; International Association of Wildland Fire: Fairfield, WA, USA, 1999; Volume 2. [Google Scholar]
- Plank, S.; Martinis, S. A fully automatic burnt area mapping processor based on AVHRR imagery—A timeline thematic processor. Remote Sens. 2018, 10, 341. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Bréon, F.-M. Towards a generalized approach for correction of the BRDF effect in MODIS directional reflectances. IEEE Trans. Geosci. Remote Sens. 2008, 47, 898–908. [Google Scholar] [CrossRef]
- National Aeronautics and Space Administration. Fire Information for Resource Management System (FIRMS). Available online: https://firms.modaps.eosdis.nasa.gov (accessed on 1 January 2020).
- Chan, T.; Vese, L. Active contours without edges. IEEE Trans. Image Process. 2001, 10, 266–277. [Google Scholar] [CrossRef]
- Caselles, V.; Kimmel, R.; Sapiro, G. Geodesic active contours. Int. J. Comput. Vis. 1997, 22, 61–79. [Google Scholar] [CrossRef]
- Marquez-Neila, P.; Baumela, L.; Alvarez, L. A morphological approach to curvature-based evolution of curves and surfaces. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 36, 2–17. [Google Scholar] [CrossRef]
- Álvarez, L.; Baumela, L.; Henríquez, P.; Márquez-Neila, P. Morphological snakes. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2197–2202. [Google Scholar]
- Liu, Y.; Dai, Q.; Liu, J.; Liu, S.; Yang, J. Study of burn scar extraction automatically based on level set method using remote sensing data. PLoS ONE 2014, 9, e87480. [Google Scholar] [CrossRef]
- Yan, L.; Roy, D. Conterminous United States crop field size quantification from multi-temporal Landsat data. Remote Sens. Environ. 2016, 172, 67–86. [Google Scholar] [CrossRef]
- San-Miguel-Ayanz, J.; Durrant, T.; Boca, R.; Libertà, G.; Branco, A.; de Rigo, D.; Ferrari, D.; Maianti, P.; Artés Vivancos, T.; Oom, D.; et al. Forest fires in Europe, Middle East and North Africa 2018; Joint Research Centre Technical Report; Publications Office of the European Union: Luxembourg, 2018. [Google Scholar]
- Padilla, M.; Stehman, S.; Ramo, R.; Corti, D.; Hantson, S.; Oliva, P.; Alonso-Canas, I.; Bradley, A.; Tansey, K.; Mota, B. Comparing the accuracies of remote sensing global burned area products using stratified random sampling and estimation. Remote Sens. Environ. 2015, 160, 114–121. [Google Scholar] [CrossRef]
- Rodrigues, J.; Libonati, R.; Pereira, A.; Nogueira, J.; Santos, F.; Peres, L.; Santa Rosa, A.; Schroeder, W.; Pereira, J.; Giglio, L. How well do global burned area products represent fire patterns in the Brazilian Savannas biome? An accuracy assessment of the MCD64 collections. Int. J. Appl. Earth Obs. Geoinf. 2019, 78, 318–331. [Google Scholar] [CrossRef]
- Libonati, R.; DaCamara, C.; Setzer, A.; Morelli, F.; Melchiori, A. An algorithm for burned area detection in the Brazilian Cerrado using 4 μ MODIS imagery. Remote Sens. 2015, 7, 15782–15803. [Google Scholar] [CrossRef]
- Schaaf, C.; Gao, F.; Strahler, A.; Lucht, W.; Li, X.; Tsang, T.; Strugnell, N.; Zhang, X.; Jin, Y.; Muller, J.-P. First operational BRDF, albedo nadir reflectance products from MODIS. Remote sensing of Environment 2002, 83, 135–148. [Google Scholar] [CrossRef]
- Müller, R.; Avbelj, J.; Carmona, E.; Gerasch, B.; Graham, L.; Günther, B.; Heiden, U.; Kerr, G.; Knodt, U.; Krutz, D.; et al. The new hyperspectral sensor DESIS on the multi-payload platform MUSES installed on the ISS. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 461–467. [Google Scholar] [CrossRef]
- Earth Observation Center EOC of DLR. Welcome to EnMAP. Available online: http://www.enmap.org/sites/default/files/pdf/pub/Web_EnMAP_2018_eng.pdf (accessed on 5 March 2020).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Date | Sensor | Reference | |
|---|---|---|---|---|
| Single incident analysis | ||||
| Jaen/Spain | 2017/08/03 | S3A-OLCI | Copernicus EMS | |
| Corsica/France | 2017/08/11 | S3A-OLCI | Copernicus EMS | |
| Kalamos/Greece | 2017/08/11 | S3A-OLCI | Copernicus EMS | |
| Zakynthos/Greece | 2017/08/11 | S3A-OLCI | Copernicus EMS | |
| Leon/Spain | 2017/08/22 | S3A-OLCI | Copernicus EMS | |
| Large scale analysis (country-wide) | ||||
| Spain, Portugal, Greece, Italy, France | 2017/08/01– 2017/08/31 | S3A-OLCI | JRC EFFIS BA | |
| Spain, Portugal, Greece, Italy, France | 2017/08/01– 2017/08/31 | S3A-OLCI | NASA MCD64A1 | |
| Spain, Portugal, Greece, Italy, France | 2017/08/01– 2017/08/31 | S3A-OLCI | ESA Fire_cci 5.1 BA | |
| Accuracy and timeliness analysis | ||||
| Near Lleida, Catalonia/Spain | 2019/06/27– 2019/07/02 | AQUA/TERRA MODIS | JRC EFFIS BA |
| Jaen/Spain | Corsica/France | Kalamos/Greece | Zakynthos/Greece | Leon/Spain | |
|---|---|---|---|---|---|
| Total BA in reference | 606 ha | 1160 ha | 2969 ha | 1278 ha | 9519.12 ha |
| NRT mode | |||||
| True positives | 85.8 % | 73.7 % | 90.5 % | 55.9 % | 52.6 % |
| False negatives | 14.2 % | 26.3 % | 9.5 % | 44.1 % | 47.4 % |
| False positives | 21.1 % | 33.4 % | 11.0 % | 21.6 % | 14.5 % |
| Fusion mode | |||||
| True positives | 80.3 % | 64.3 % | 89.2 % | 55.0 % | 59.4 % |
| False negatives | 19.7 % | 35.7 % | 10.8 % | 45.0 % | 40.6 % |
| False positives | 14.7 % | 27.3 % | 10.3 % | 21.1 % | 16.8 % |
| JRC EFFIS BA | NASA MCD64A1 | ESA Fire_cci 5.1 BA | Combined | |
|---|---|---|---|---|
| Total BA in reference (with number of polygons in brackets) | 153,330 ha (155) | 157,187 ha (165) | 185,266 ha (285) | 270,133.70 ha (351) |
| NRT mode | ||||
| True positives | 75.9% (133) | 74.7% (133) | 62.9% (187) | 57.8% (206) |
| False negatives | 24.1% | 25.3% | 37.1% | 42.2% |
| False positives | 95.1% | 92.1% | 78.6% | 39.2% |
| Fusion mode | ||||
| True positives | 73.3% (130) | 72.0% (131) | 60.1% (174) | 55.0% (195) |
| False negatives | 26.7% | 28.0% | 39.9% | 45.0% |
| False positives | 87.2% | 84.5% | 72.7% | 36.1% |
| JRC EFFIS BA | NASA MCD64A1 | ESA Fire_cci 5.1 BA | |
|---|---|---|---|
| JRC EFFIS BA | |||
| True positives | X | 74.4 % | 54.7 % |
| False negatives | X | 25.8 % | 45.3 % |
| False positives | X | 26.8 % | 31.0 % |
| NASA MCD64A1 | |||
| True positives | 76.0 % | X | 55.2 % |
| False negatives | 24.0 % | X | 44.8 % |
| False positives | 27.5 % | X | 30.5 % |
| ESA Fire_cci 5.1 BA | |||
| True positives | 66.1 % | 66.5 % | X |
| False negatives | 33.9 % | 33.5 % | X |
| False positives | 37.4 % | 34.4 % | X |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nolde, M.; Plank, S.; Riedlinger, T. An Adaptive and Extensible System for Satellite-Based, Large Scale Burnt Area Monitoring in Near-Real Time. Remote Sens. 2020, 12, 2162. https://doi.org/10.3390/rs12132162
Nolde M, Plank S, Riedlinger T. An Adaptive and Extensible System for Satellite-Based, Large Scale Burnt Area Monitoring in Near-Real Time. Remote Sensing. 2020; 12(13):2162. https://doi.org/10.3390/rs12132162
Chicago/Turabian StyleNolde, Michael, Simon Plank, and Torsten Riedlinger. 2020. "An Adaptive and Extensible System for Satellite-Based, Large Scale Burnt Area Monitoring in Near-Real Time" Remote Sensing 12, no. 13: 2162. https://doi.org/10.3390/rs12132162
APA StyleNolde, M., Plank, S., & Riedlinger, T. (2020). An Adaptive and Extensible System for Satellite-Based, Large Scale Burnt Area Monitoring in Near-Real Time. Remote Sensing, 12(13), 2162. https://doi.org/10.3390/rs12132162