A Visualization Tool for Flood Dynamics Monitoring Using a Graph-Based Approach



Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Data
2.1. Synthetic Aperture Radar Imagery
2.2. Reference Data
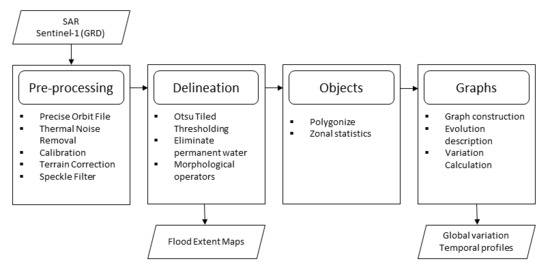
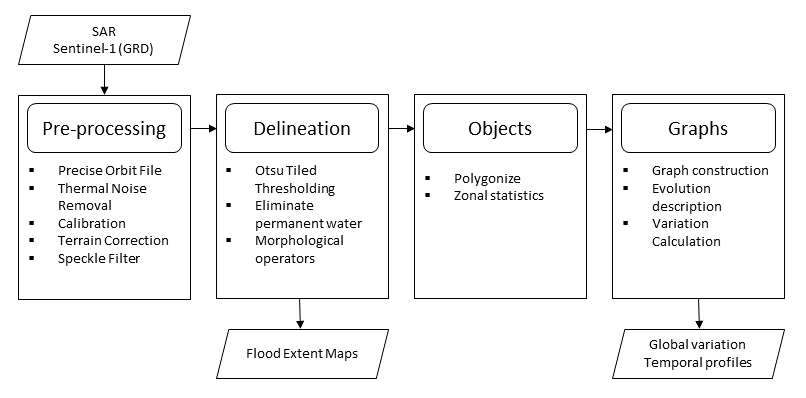
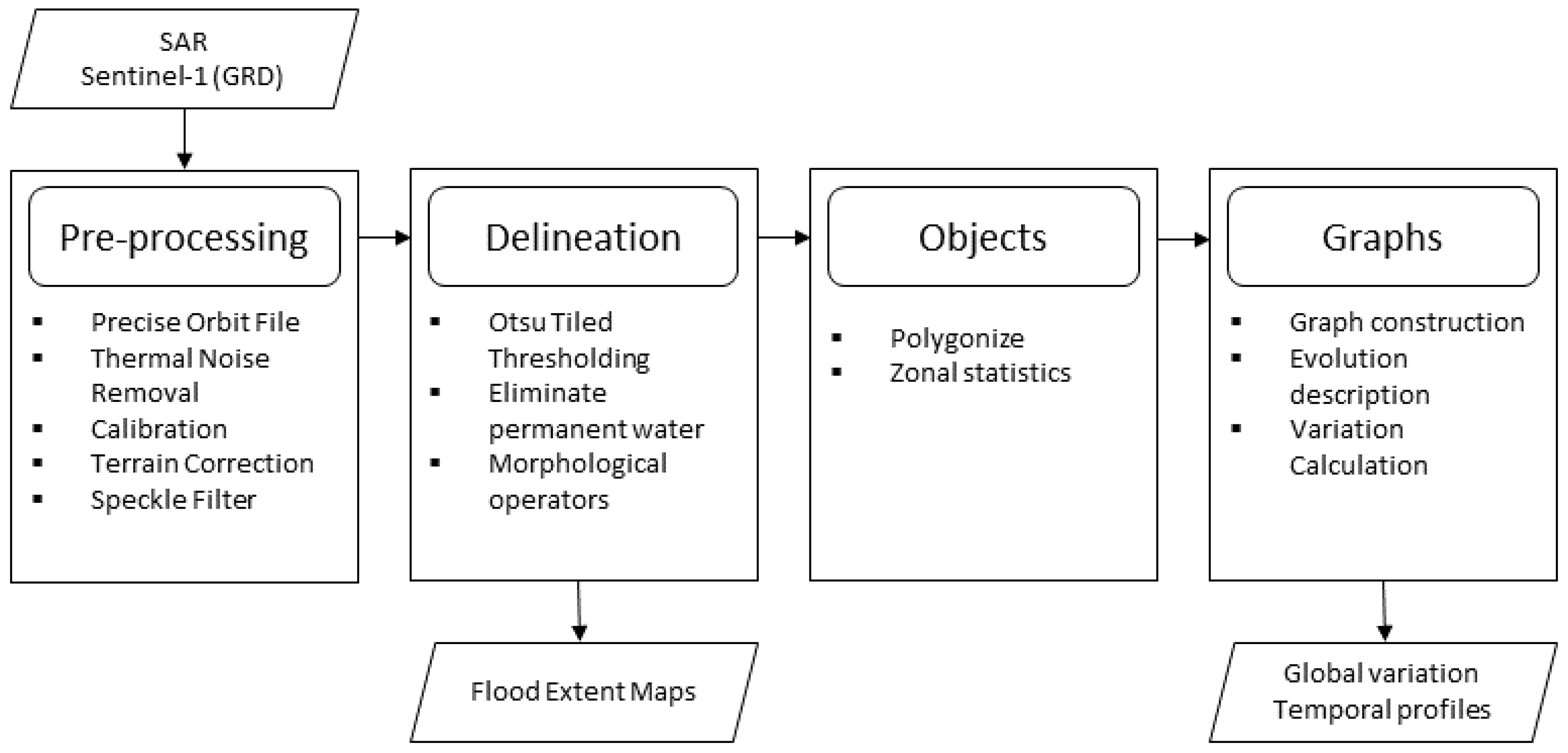
3. Method/Method Adaptations
4. Results
4.1. Pre-Processing and Thresholding
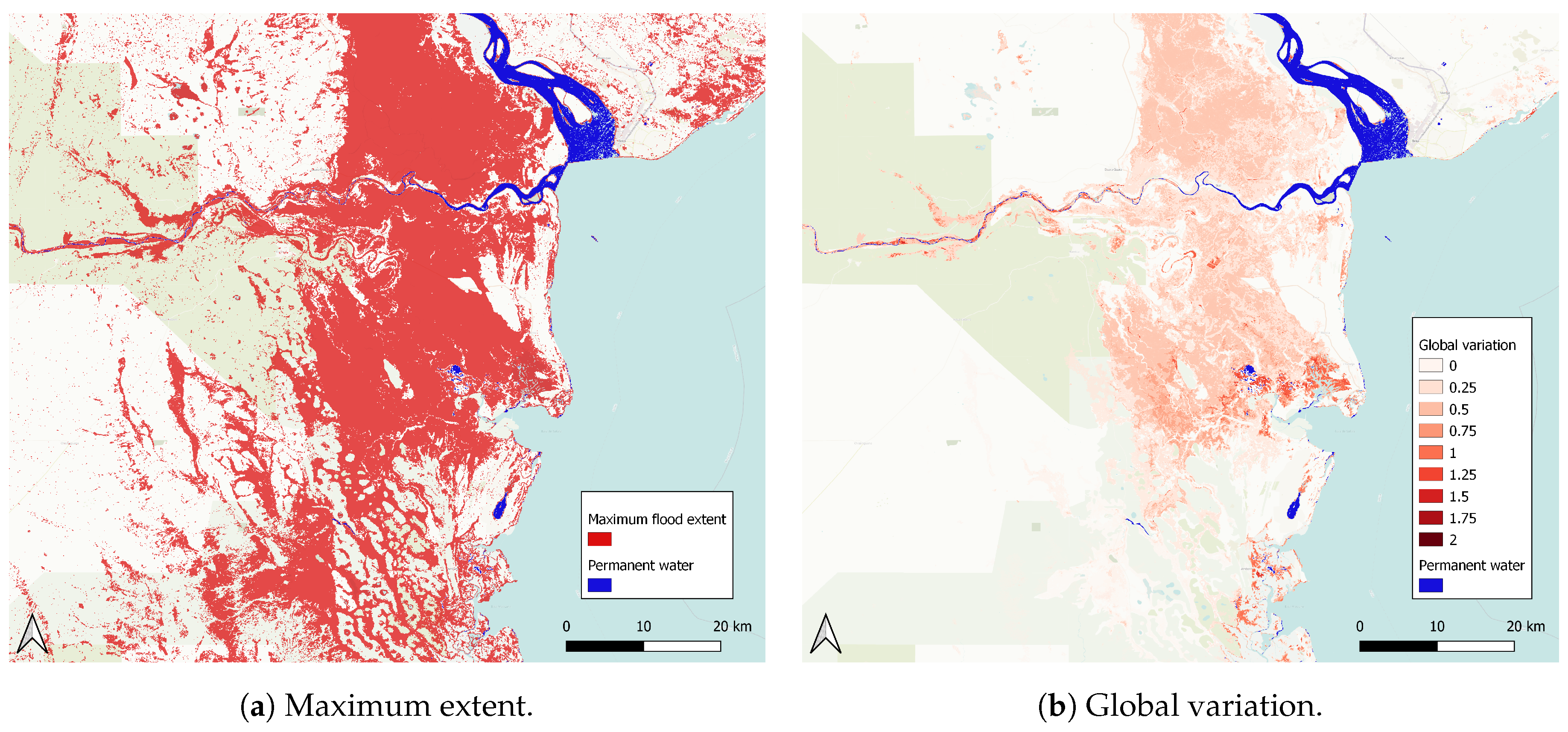
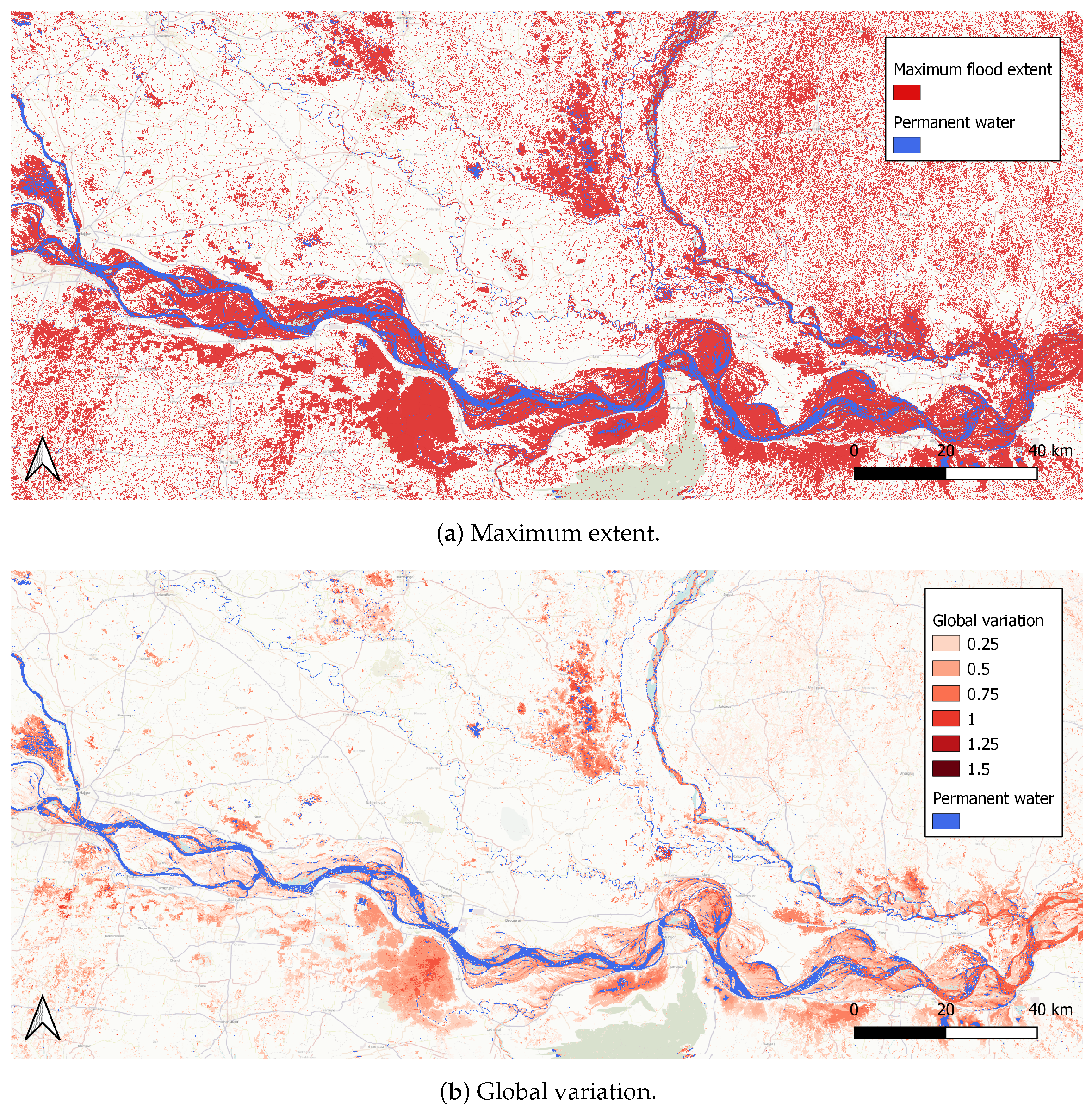
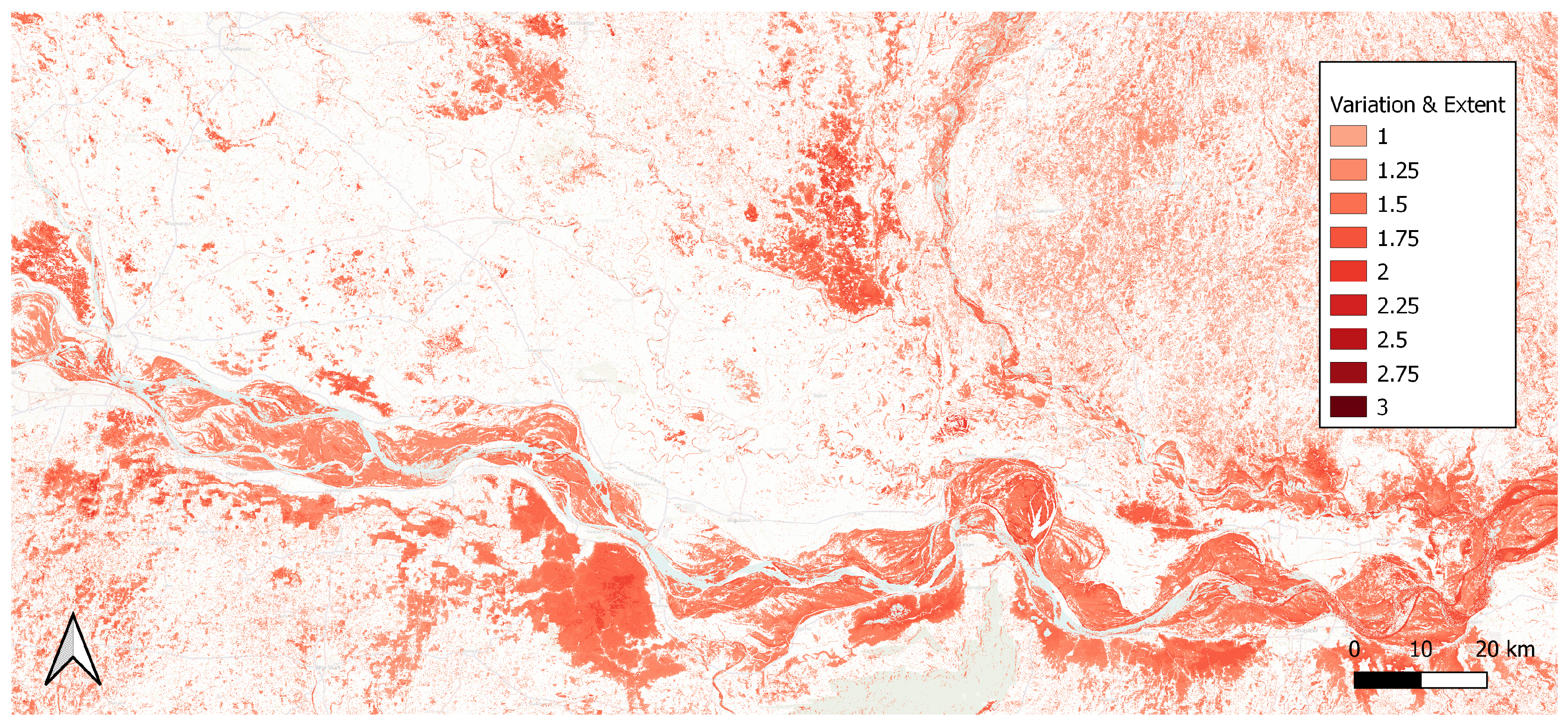
4.2. Global Variation Versus Maximum Flood Extent
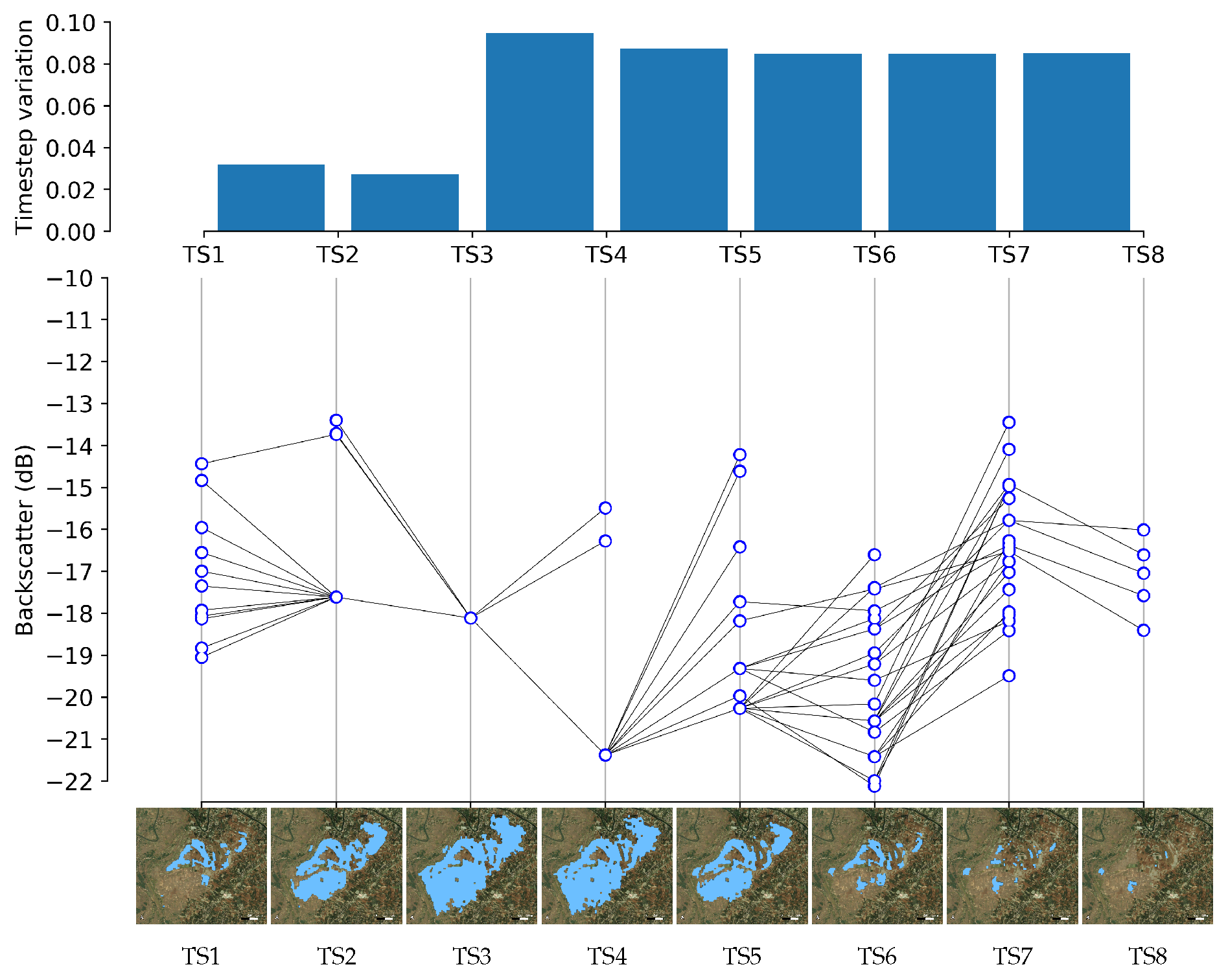
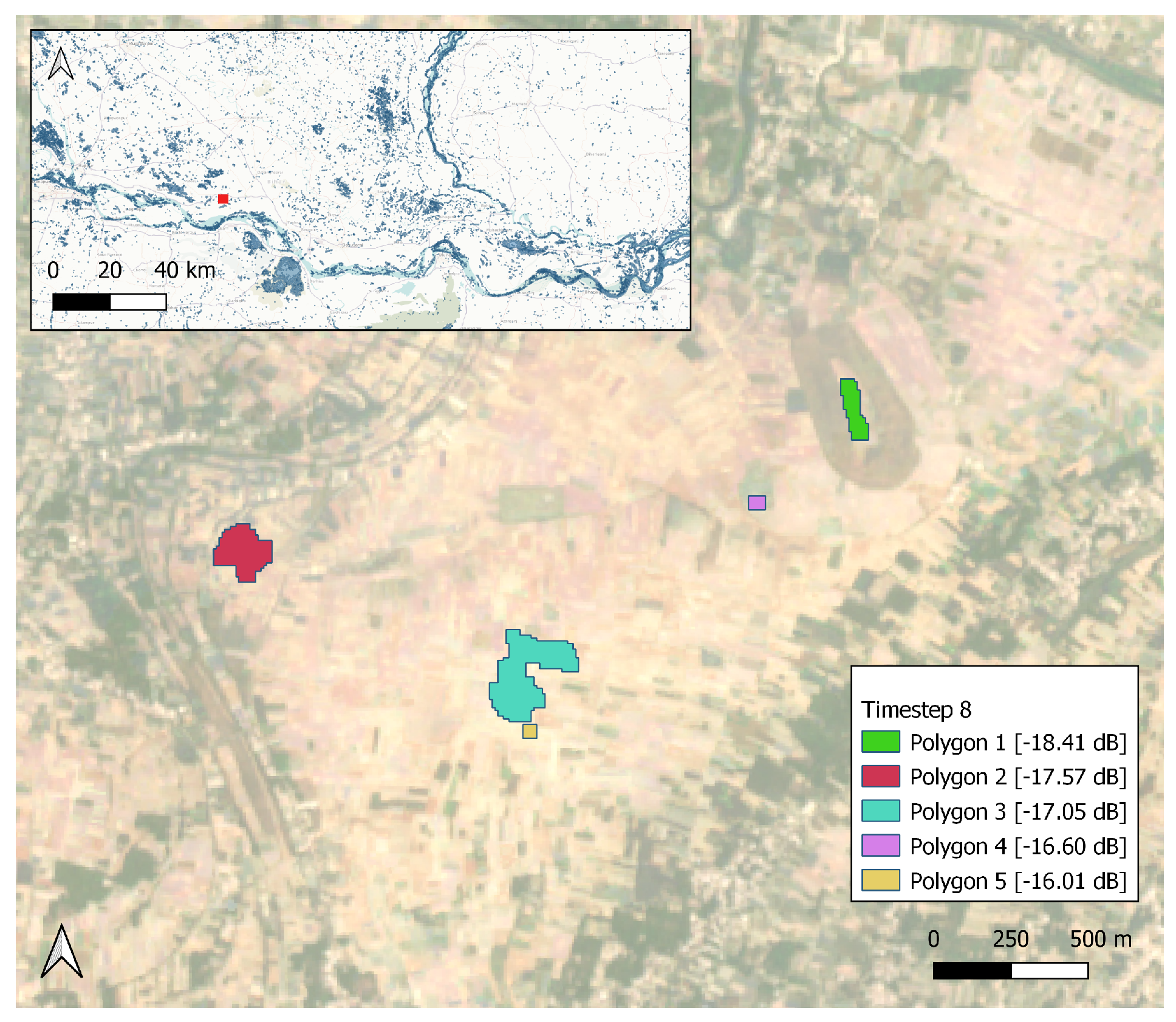
4.3. Graphs
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ESA | European Space Agency |
| GRD | Ground Range Detected |
| LIST | Luxembourg Institute of Science and Technology |
| MUM | Minimal Mapping Unit |
| ROI | Region Of Interest |
| SAR | Synthetic Aperture Radar |
| SITS | Satellite Image Time Series |
References
- Rättich, M.; Martinis, S.; Wieland, M. Automatic flood duration estimation based on multi-sensor satellite data. Remote Sens. 2020, 12, 643. [Google Scholar] [CrossRef]
- Ismail, M.S.; Md, A.N.; Ghazaly, M.D. A Study on the Effect of Flooding Depths and Duration on Soil Subgrade Performance and Stability. Int. J. 2020, 19, 182–187. [Google Scholar] [CrossRef]
- O’Hara, R.; Green, S.; McCarthy, T. The agricultural impact of the 2015-2016 floods in Ireland as mapped through Sentinel 1 satellite imagery. Ir. J. Agric. Food Res. 2019, 58, 44–65. [Google Scholar] [CrossRef]
- Wagenaar, D. The Significance of Flood Duration for Flood Damage Assessment. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2012; pp. 1–104. [Google Scholar]
- Van Wesemael, A.; Landuyt, L.; Lievens, H.; Verhoest, N.E. Improving flood inundation forecasts through the assimilation of in situ floodplain water level measurements based on alternative observation network configurations. Adv. Water Resour. 2019, 130, 229–243. [Google Scholar] [CrossRef]
- Dasgupta, A.; Hostache, R.; Ramsankaran, R. Evaluating the Impact of Flood Extent Assimilation on Hydraulic Model Forecast Skill Results I: Flood Extent Evaluation Results II: Gauge Evaluation. In Proceedings of the 23rd International Congress on Modelling and Simulation (MODSIM2019), Canberra, Australia, 1–6 December 2019; pp. 3–4. [Google Scholar] [CrossRef]
- Shastry, A.; Durand, M. Utilizing flood inundation observations to obtain floodplain topography in data-scarce regions. Front. Earth Sci. 2019, 6, 1–10. [Google Scholar] [CrossRef]
- Ramachandran, R.; Li, X.; Movva, S.; Graves, S.; Greco, S.; Emmitt, D.; Terry, J.; Atlas, R. Intelligent thinning algorithm for earth system numerical model research and application. In Proceedings of the 85th AMS Annual Meeting, American Meteorological Society—Combined Preprints, San Diego, CA, USA, 9–13 January 2005; pp. 581–586. [Google Scholar]
- Debusscher, B.; Van Coillie, F. Object-based flood analysis using a graph-based representation. Remote Sens. 2019, 11, 1883. [Google Scholar] [CrossRef]
- Guttler, F.; Ienco, D.; Nin, J.; Teisseire, M.; Poncelet, P. A graph-based approach to detect spatiotemporal dynamics in satellite image time series. ISPRS J. Photogramm. Remote Sens. 2017, 130, 92–107. [Google Scholar] [CrossRef]
- Khiali, L.; Ienco, D.; Teisseire, M. Object-oriented satellite image time series analysis using a graph-based representation. Ecol. Inform. 2018, 43, 52–64. [Google Scholar] [CrossRef]
- DeVries, B.; Huang, C.; Armston, J.; Huang, W.; Jones, J.W.; Lang, M.W. Rapid and robust monitoring of flood events using Sentinel-1 and Landsat data on the Google Earth Engine. Remote Sens. Environ. 2020, 240, 111664. [Google Scholar] [CrossRef]
- Sinergise Ltd. Copernicus Open Acces Hub. Available online: https://scihub.copernicus.eu/dhus (accessed on 10 November 2019).
- EPSG.io: Find Coordinate Systems Worldwide. Available online: https://epsg.io/4326 (accessed on 25 June 2020).
- Sharma, S.; Reuters News Agency. Floods Kill 113 in North India in Late Monsoon Burst, Jail, Hospital Submerged. Available online: https://www.reuters.com/article/us-india-floods/floods-kill-113-in-north-india-in-late-monsoon-burst-jail-hospital-submerged-idUSKBN1WF0RH (accessed on 10 January 2020).
- Chini, M.; Pelich, R.; Pulvirenti, L.; Pierdicca, N.; Hostache, R.; Matgen, P. Sentinel-1 InSAR coherence to detect floodwater in urban areas: Houston and hurricane harvey as a test case. Remote Sens. 2019, 11, 107. [Google Scholar] [CrossRef]
- Ito, A.; Martinez, L.F. Issues in the implementation of the International Charter on Space and Major Disasters. Space Policy 2005, 21, 141–149. [Google Scholar] [CrossRef]
- Kaku, K.; Held, A. Sentinel Asia: A space-based disaster management support system in the Asia-Pacific region. Int. J. Disaster Risk Reduct. 2013, 6, 1–17. [Google Scholar] [CrossRef]
- Yang, X.; Shen, X.; Long, J.; Chen, H. An Improved Median-based Otsu Image Thresholding Algorithm. AASRI Procedia 2012, 3, 468–473. [Google Scholar] [CrossRef]
- Martinis, S.; Kuenzer, C.; Wendleder, A.; Huth, J.; Twele, A.; Roth, A.; Dech, S. Comparing four operational SAR-based water and flood detection approaches. Int. J. Remote Sens. 2015, 36, 3519–3543. [Google Scholar] [CrossRef]
- Mu, M. Methods, current status, and prospect of targeted observation. Sci. China Earth Sci. 2013, 56, 1997–2005. [Google Scholar] [CrossRef]
- Langland, R.H. Issues in targeted observing. Q. J. R. Meteorol. Soc. 2006, 131, 3409–3425. [Google Scholar] [CrossRef]








© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Debusscher, B.; Landuyt, L.; Van Coillie, F. A Visualization Tool for Flood Dynamics Monitoring Using a Graph-Based Approach. Remote Sens. 2020, 12, 2118. https://doi.org/10.3390/rs12132118
Debusscher B, Landuyt L, Van Coillie F. A Visualization Tool for Flood Dynamics Monitoring Using a Graph-Based Approach. Remote Sensing. 2020; 12(13):2118. https://doi.org/10.3390/rs12132118
Chicago/Turabian StyleDebusscher, Bos, Lisa Landuyt, and Frieke Van Coillie. 2020. "A Visualization Tool for Flood Dynamics Monitoring Using a Graph-Based Approach" Remote Sensing 12, no. 13: 2118. https://doi.org/10.3390/rs12132118
APA StyleDebusscher, B., Landuyt, L., & Van Coillie, F. (2020). A Visualization Tool for Flood Dynamics Monitoring Using a Graph-Based Approach. Remote Sensing, 12(13), 2118. https://doi.org/10.3390/rs12132118