Intelligent WSN System for Water Quality Analysis Using Machine Learning Algorithms: A Case Study (Tahuando River from Ecuador)

 , , and
, , and 
Abstract
:
1. Introduction
2. Related Works
3. Materials and Methods
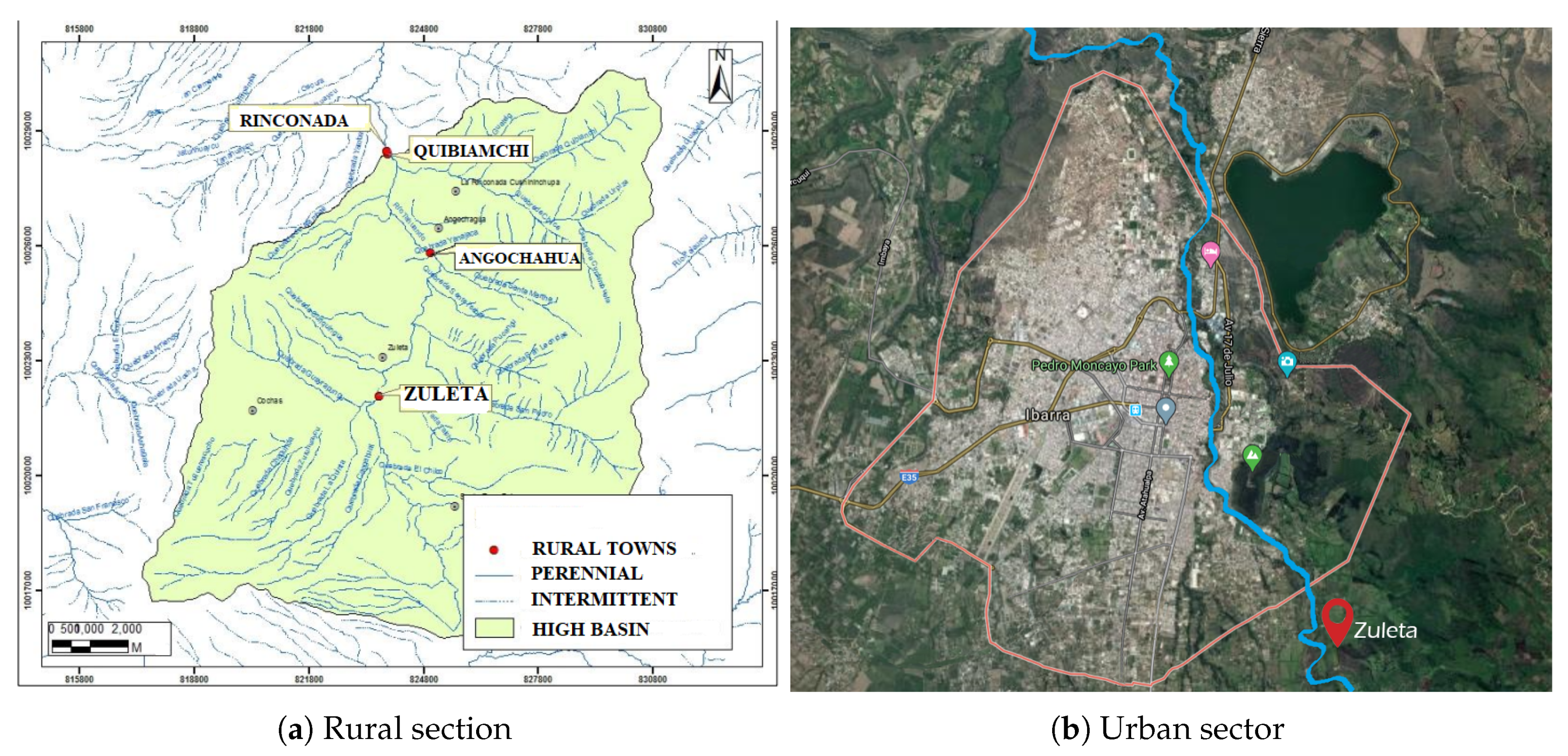
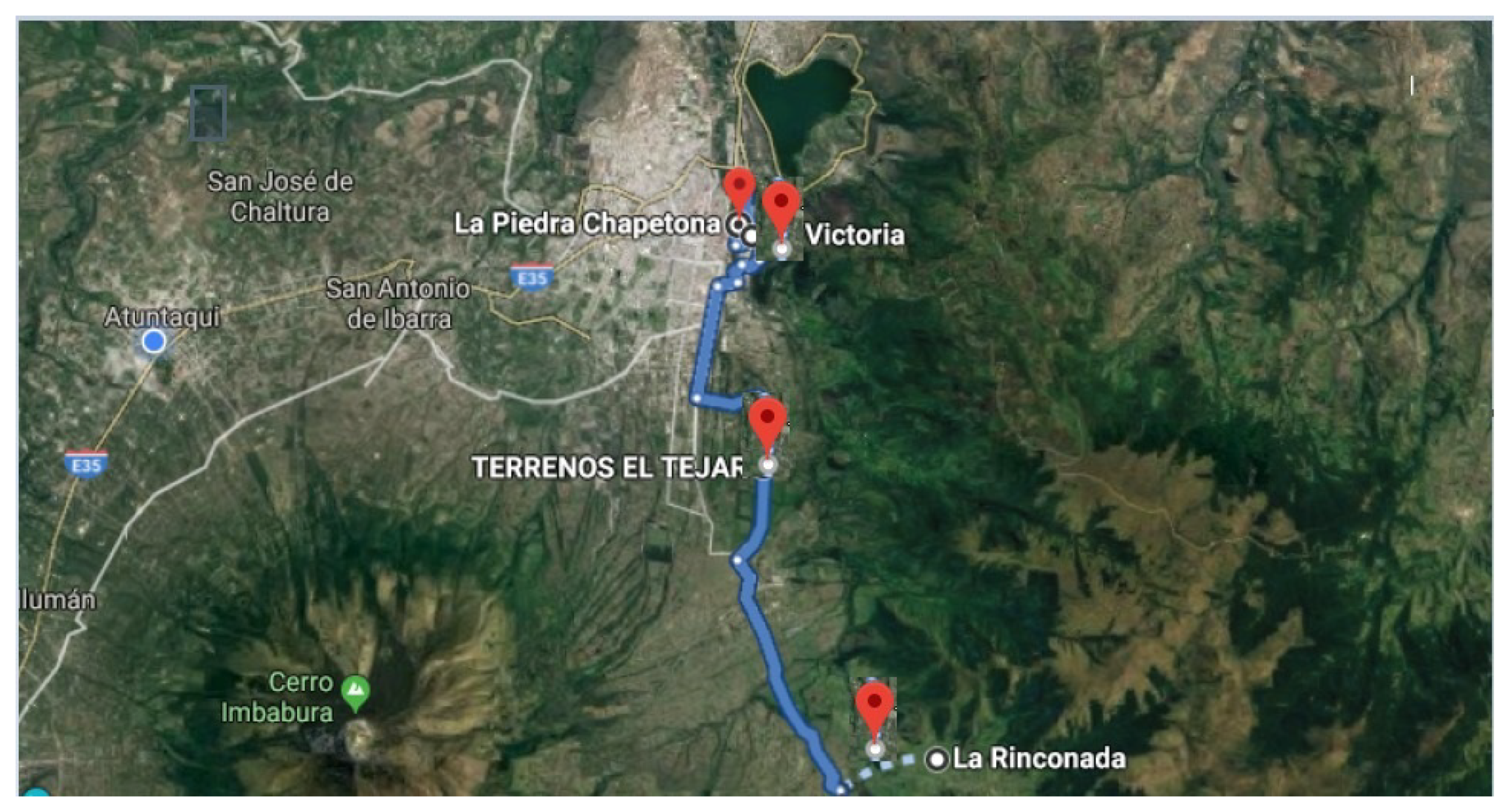
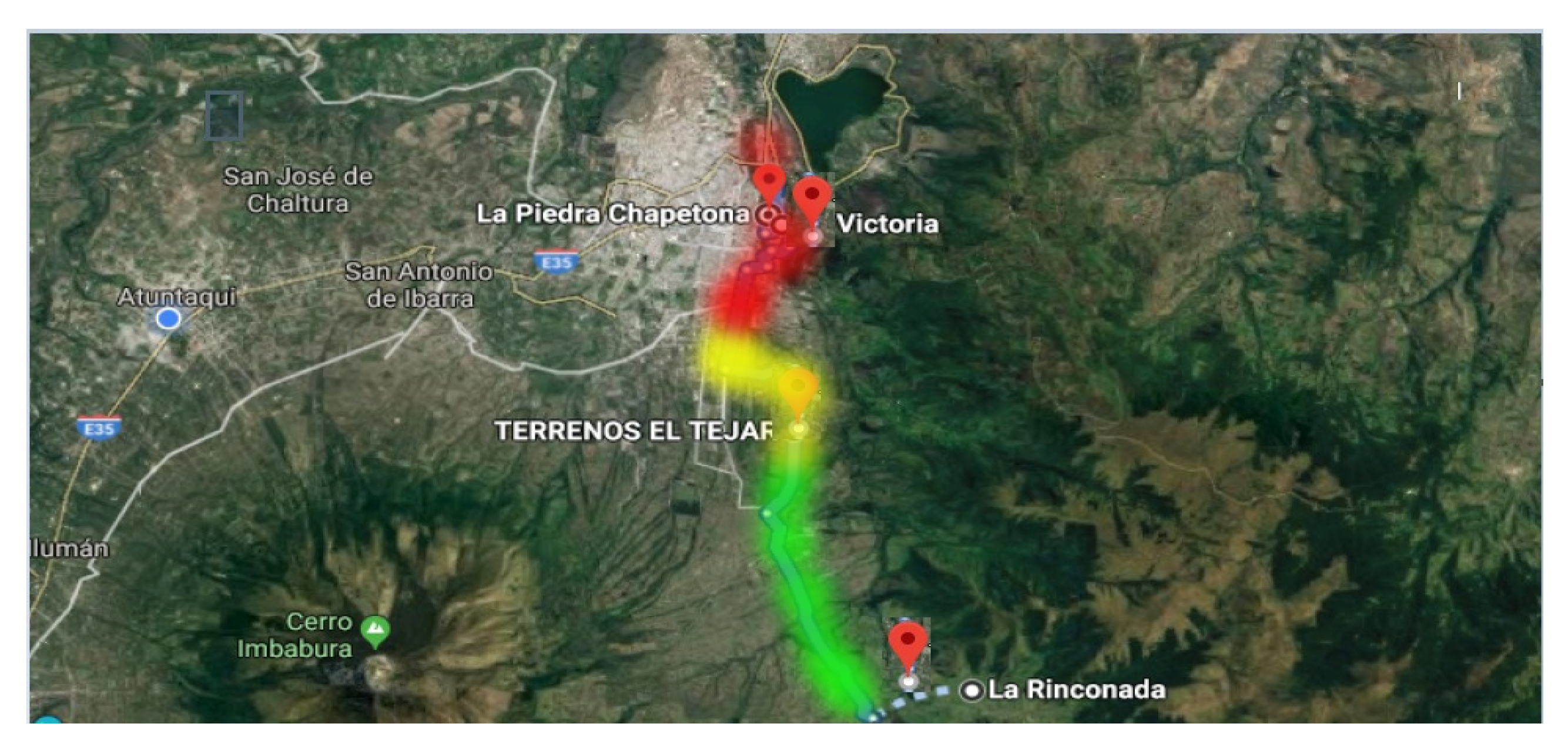
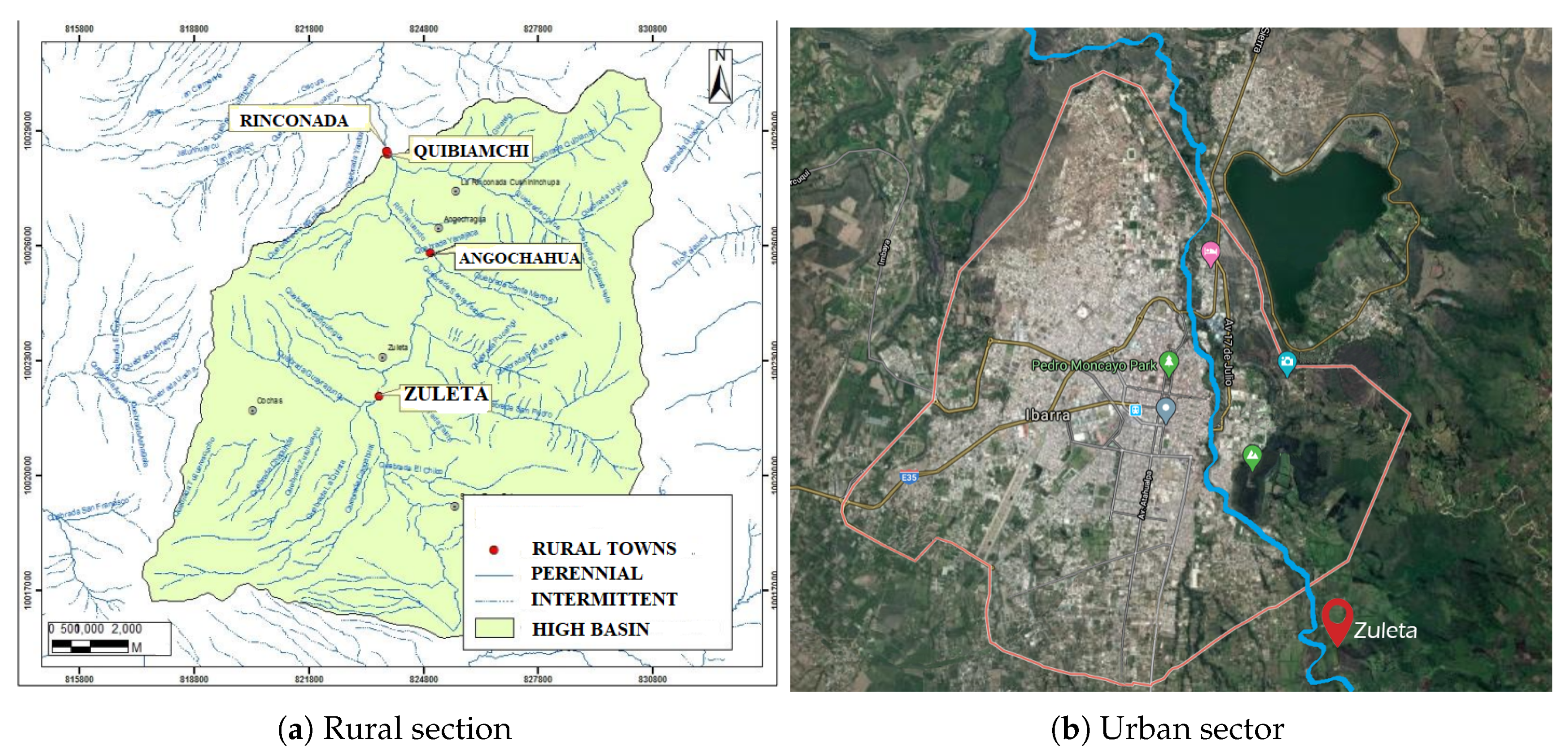
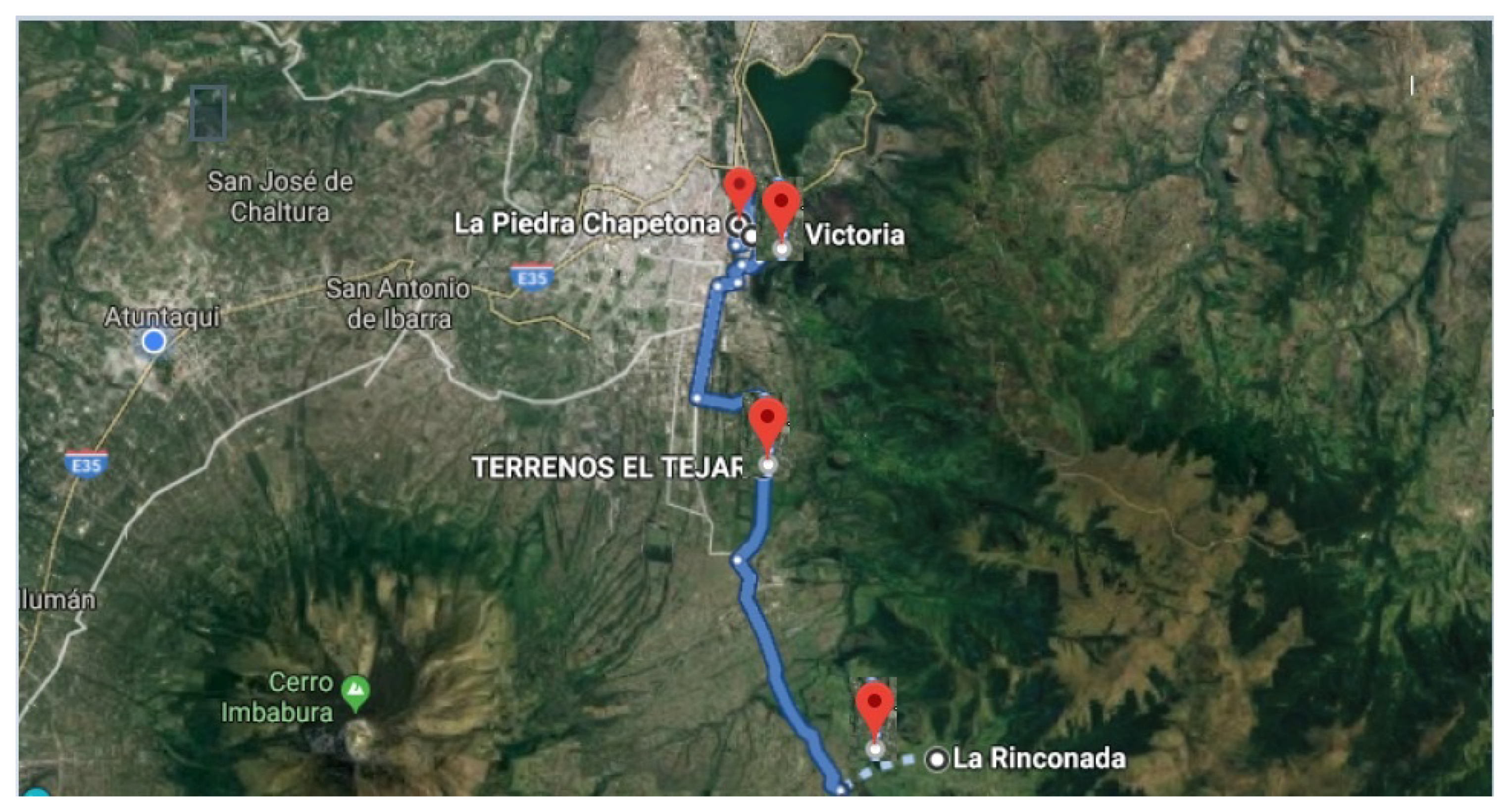
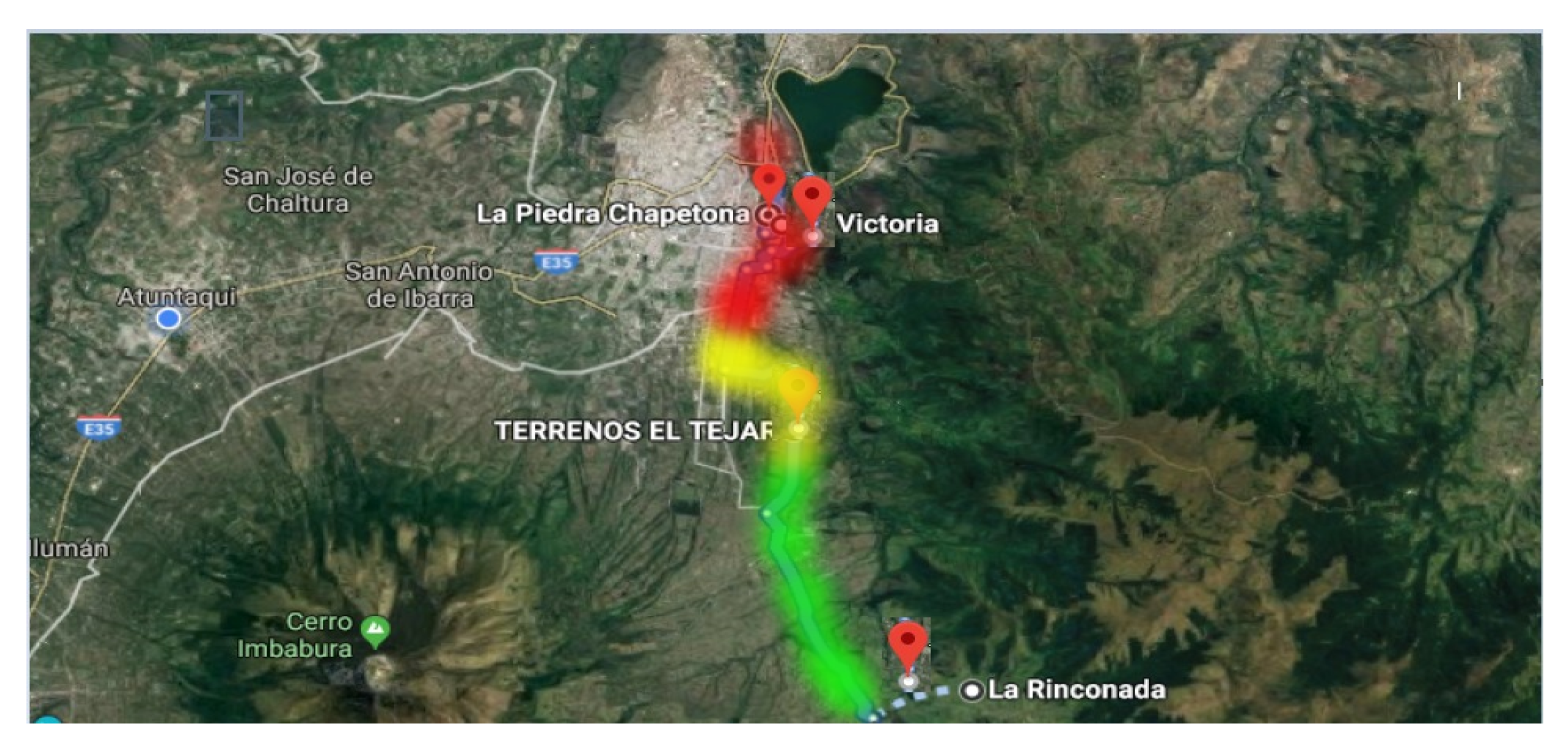
3.1. Initial Conditions of the Study Region
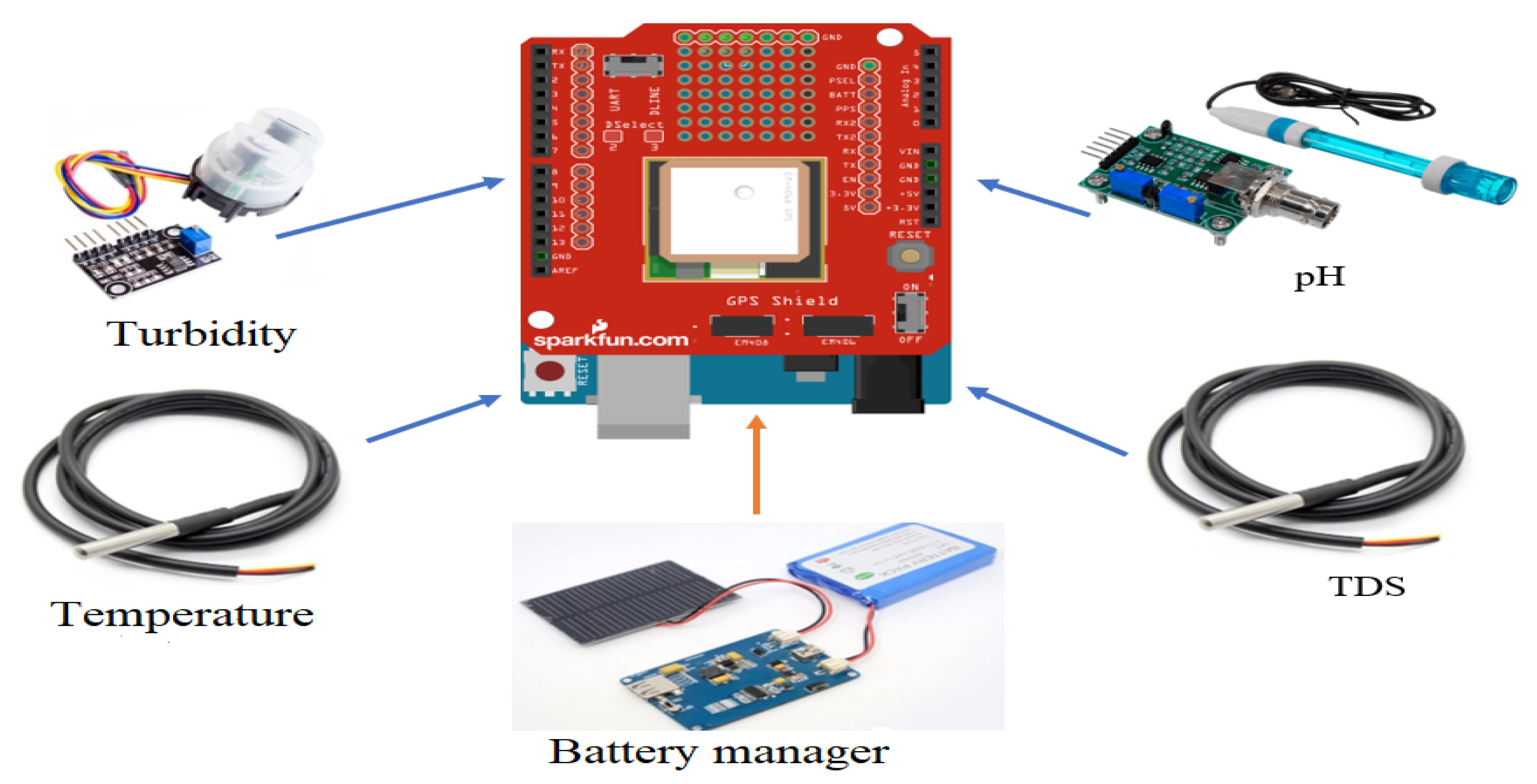
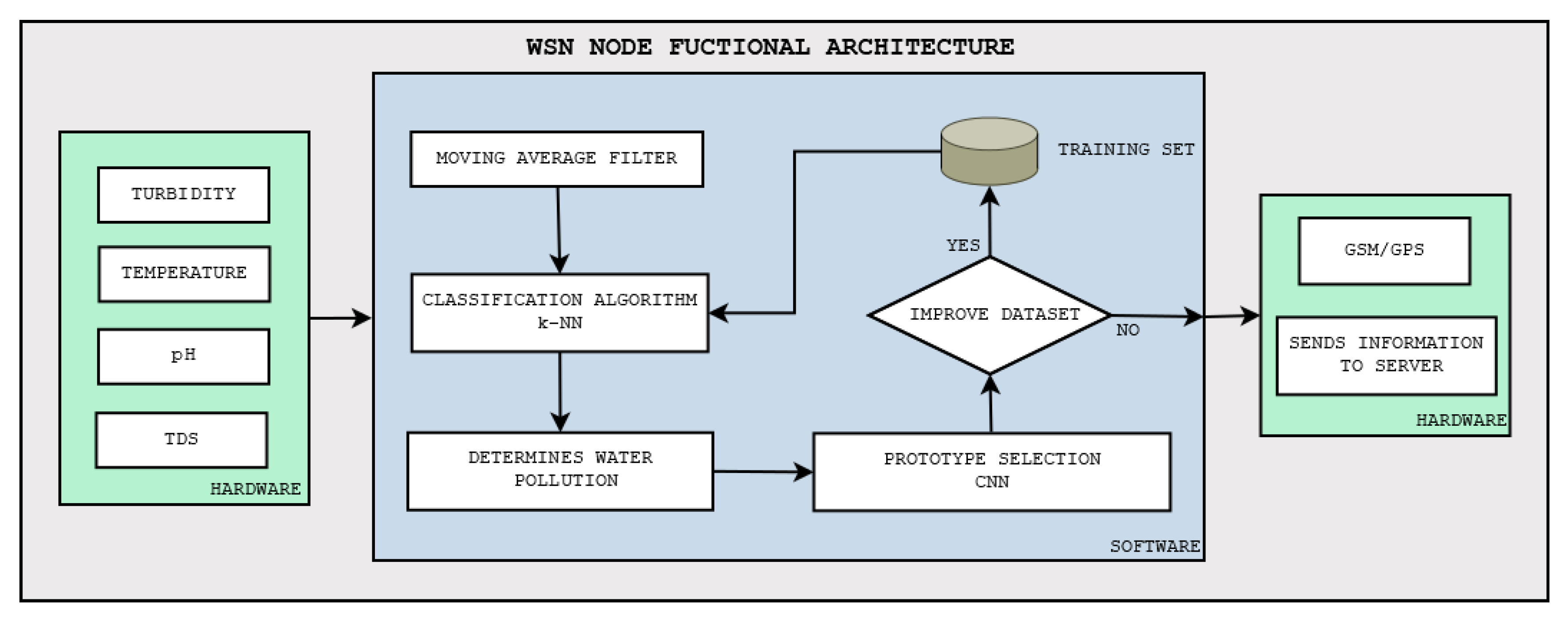
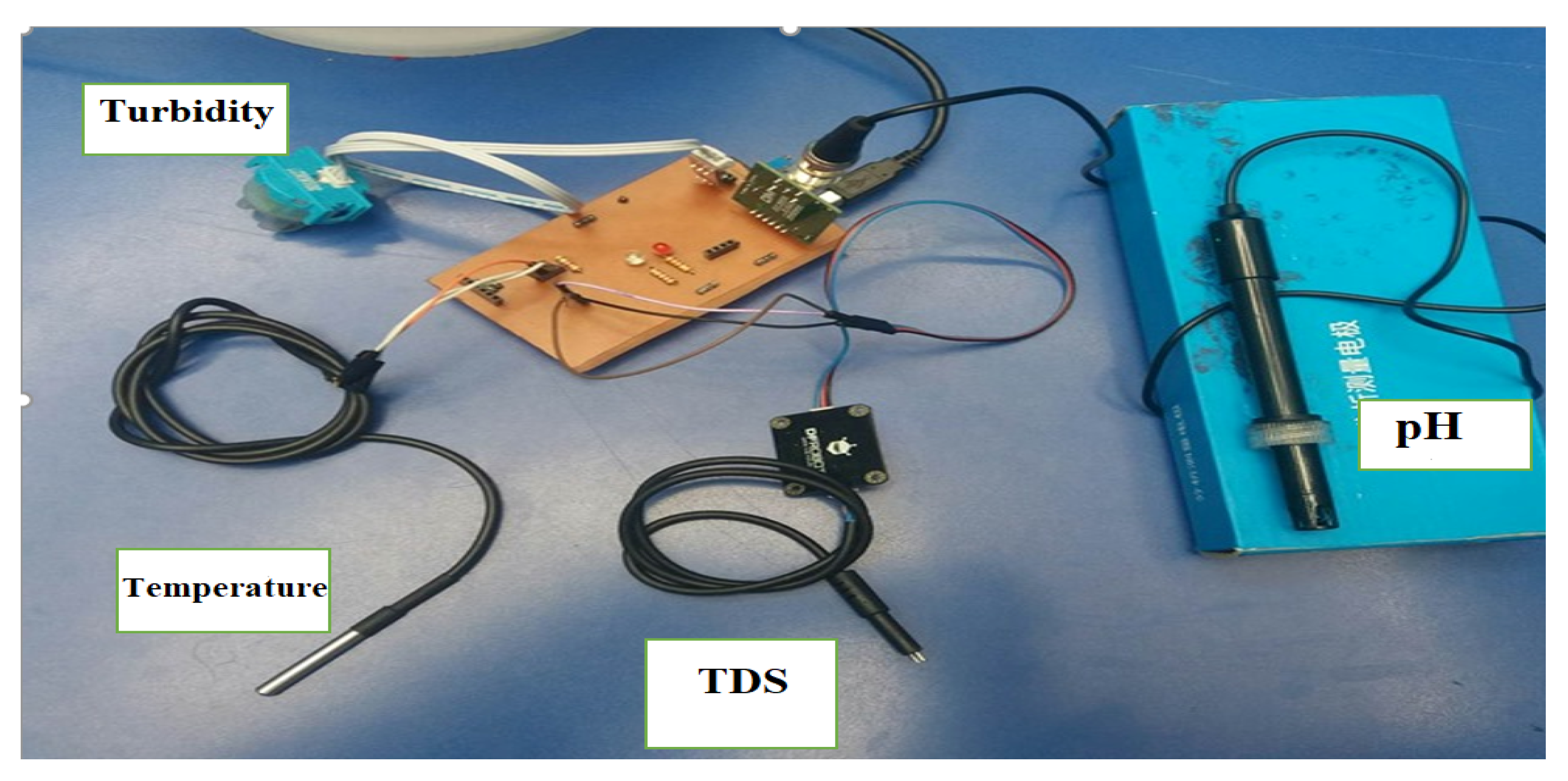
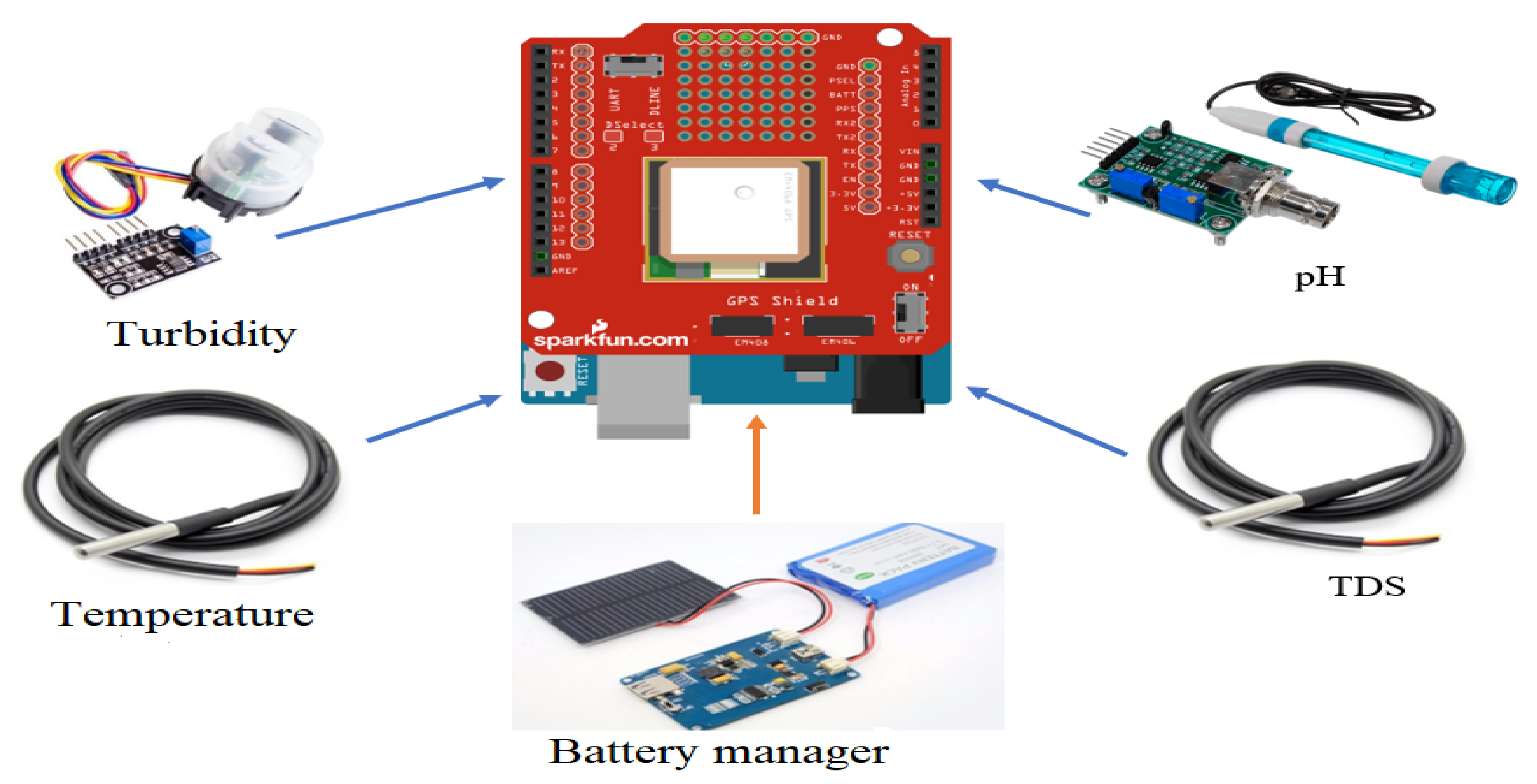
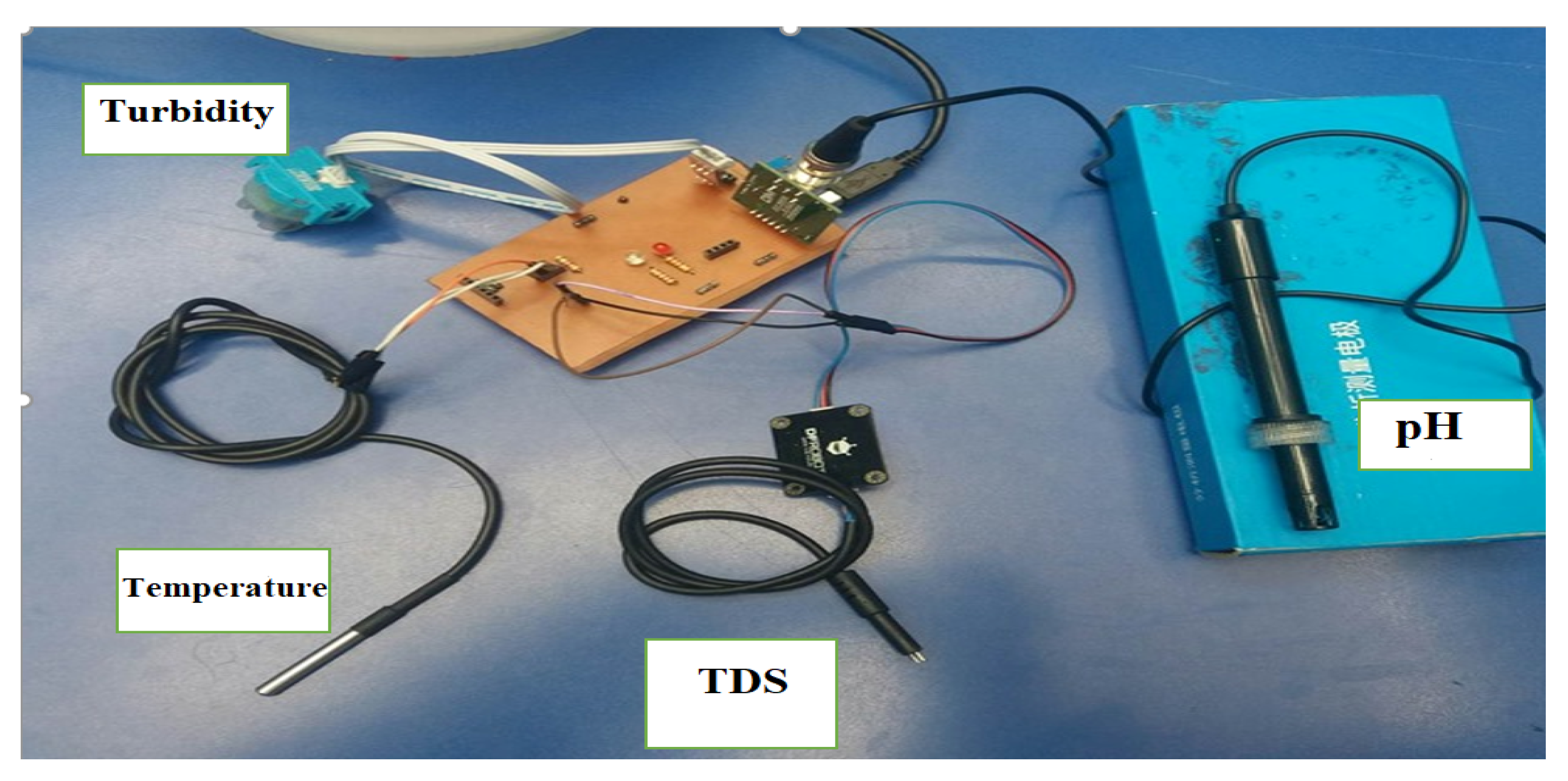
3.2. Wireless-Sensor-Network Design
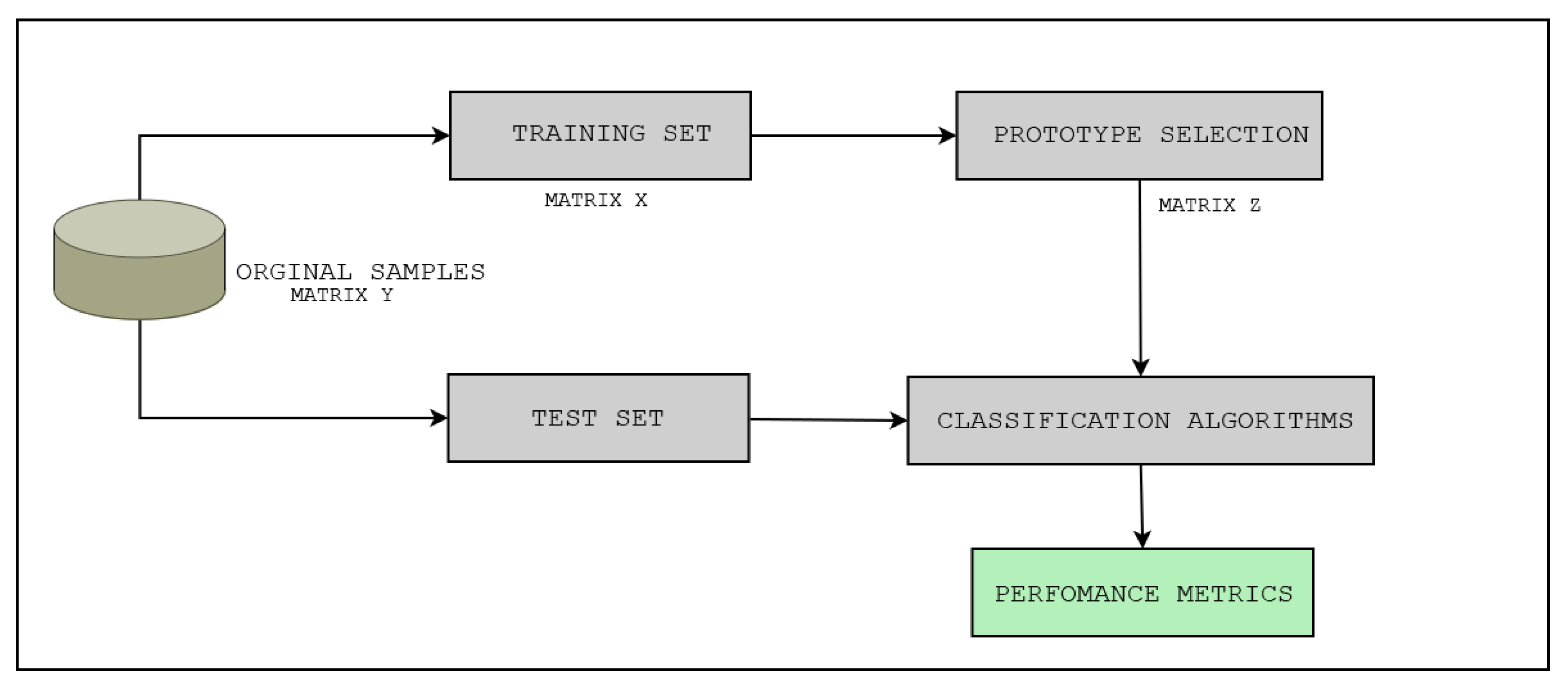
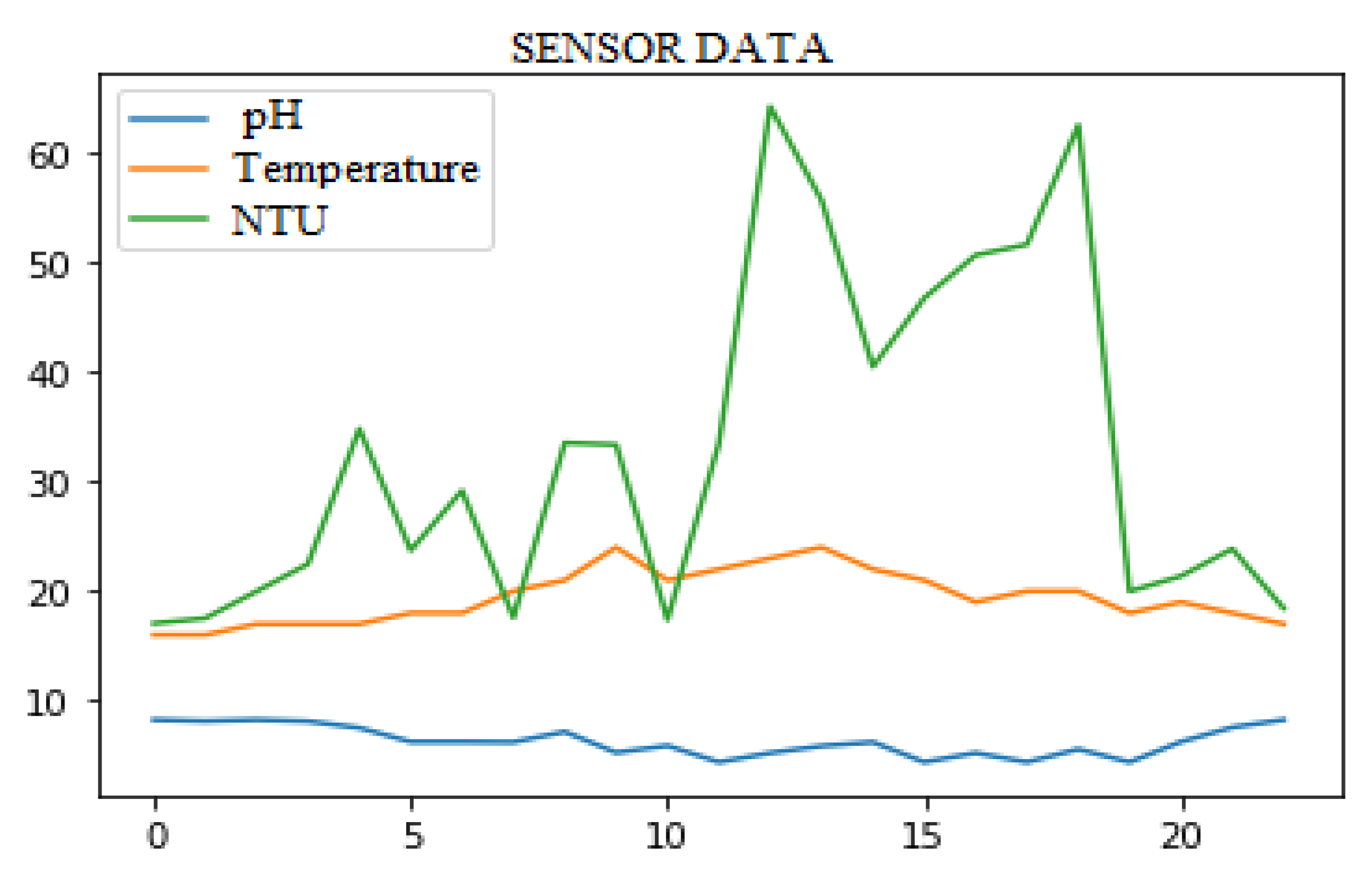
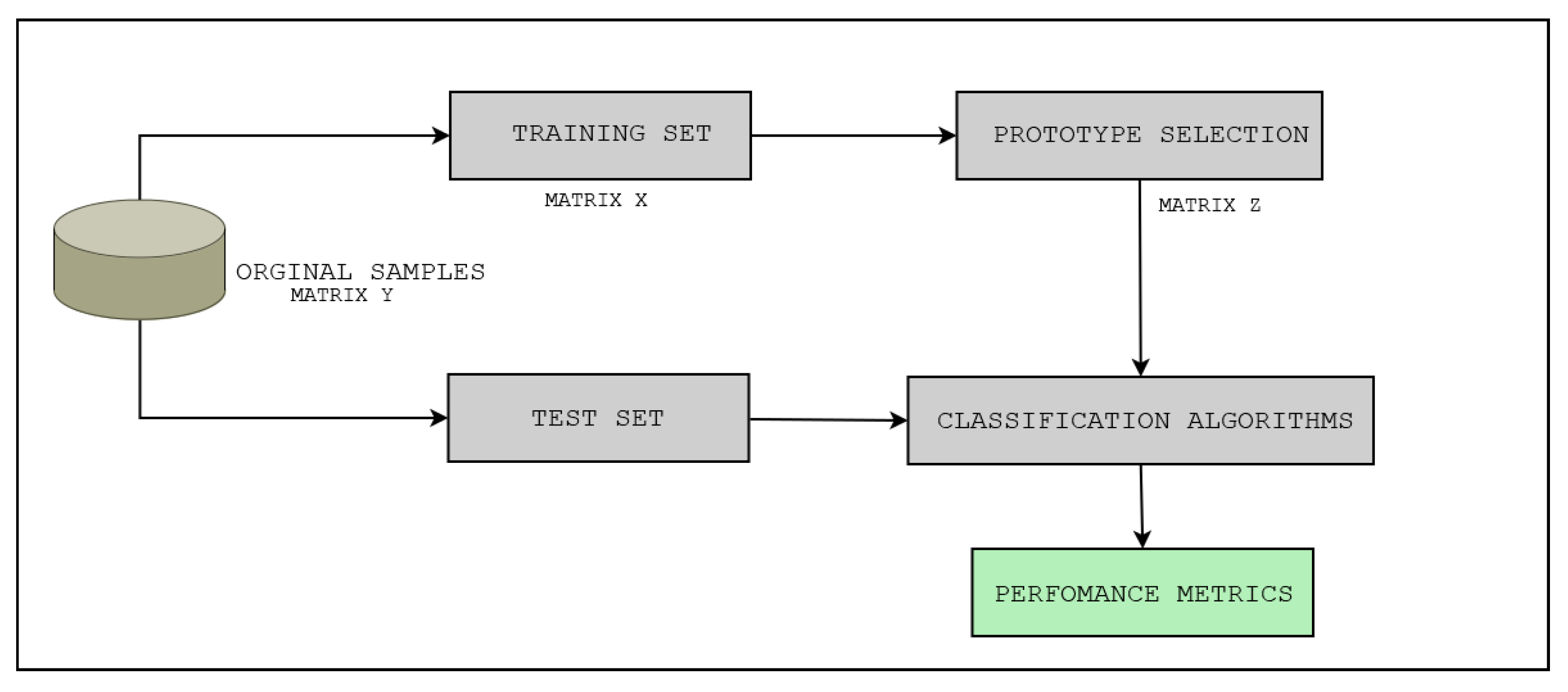
3.3. Data Analysis Paradigm
3.3.1. Proposed Quality Measure: Quantitative Metric of Balance (QMB)
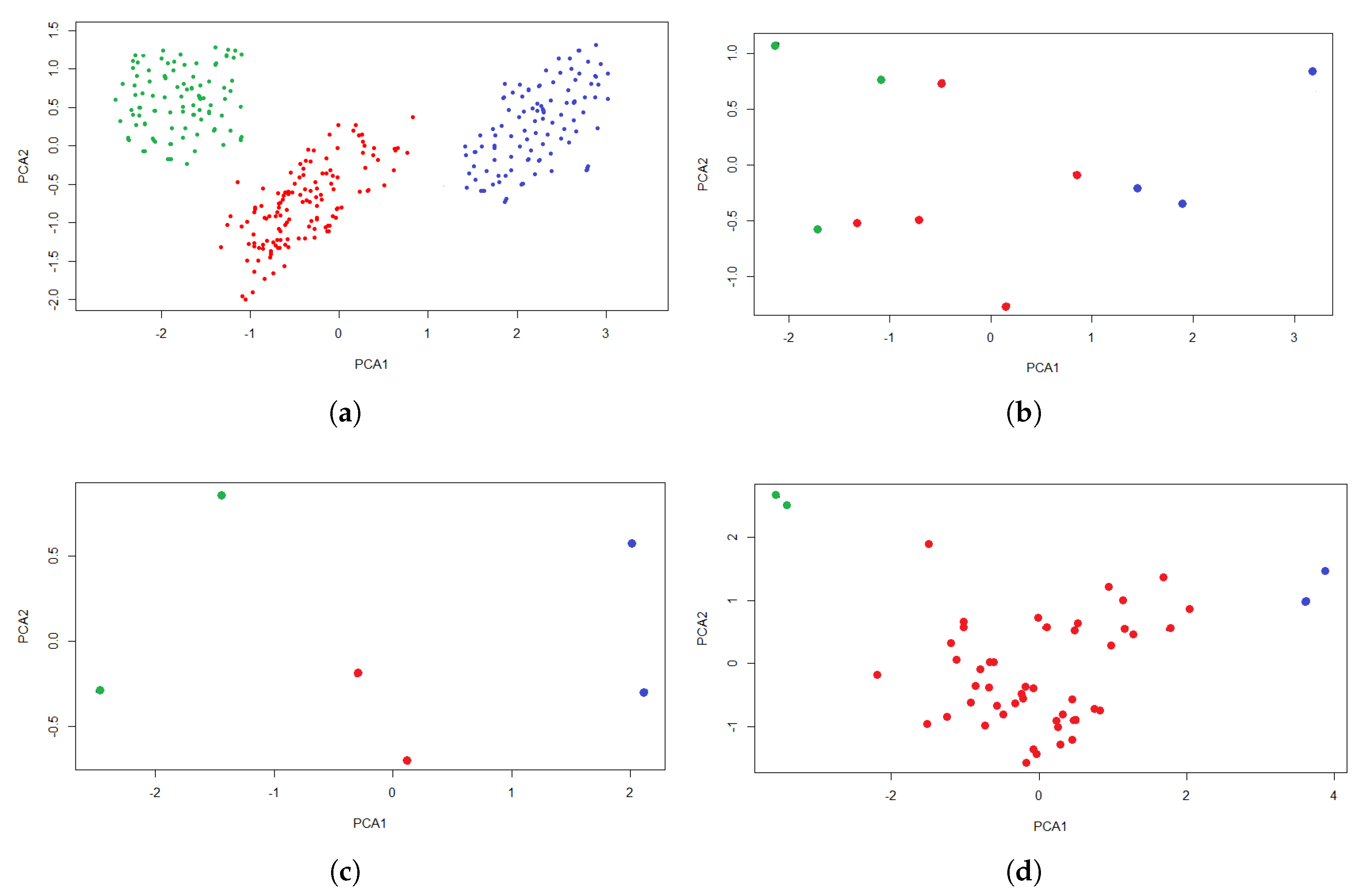
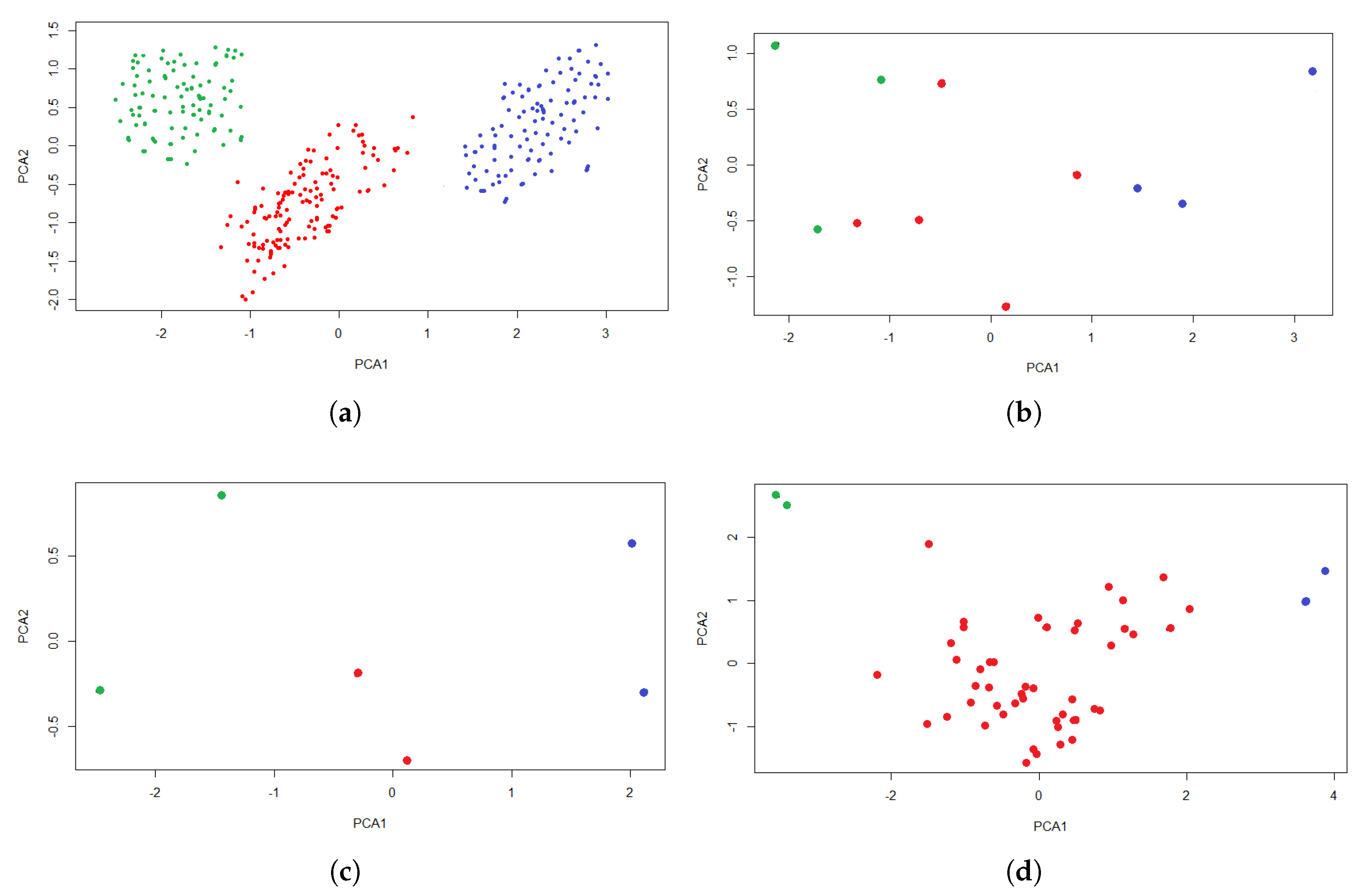
3.3.2. Prototype Selection
- Condensation: Condensed Nearest Neighbor (CNN), Reduced Nearest Neighbor (RNN), and Selective Nearest Neighbor (SNN).
- Edition: Edited Nearest Neighbor (ENN), All-k Edited Nearest Neighbors (AENN), and Iterative Partitioning Filter (IPF).
- Hybrid: Decremental Reduction Optimization Procedures 2 (DROP 2), Decremental Reduction Optimization Procedures 3 (DROP3), and Iterative Noise Filter based on the Fusion of Classifiers (INFFC).
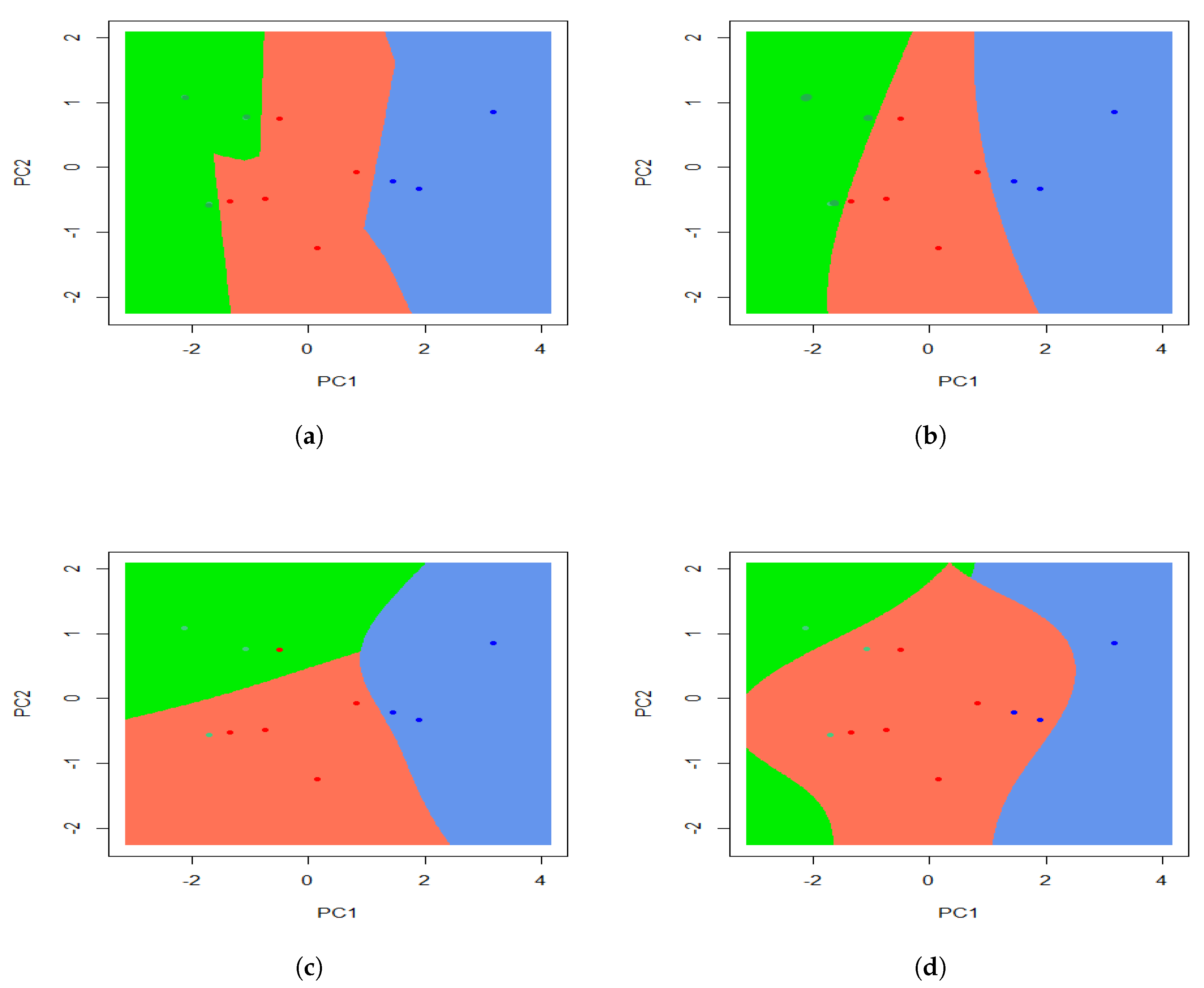
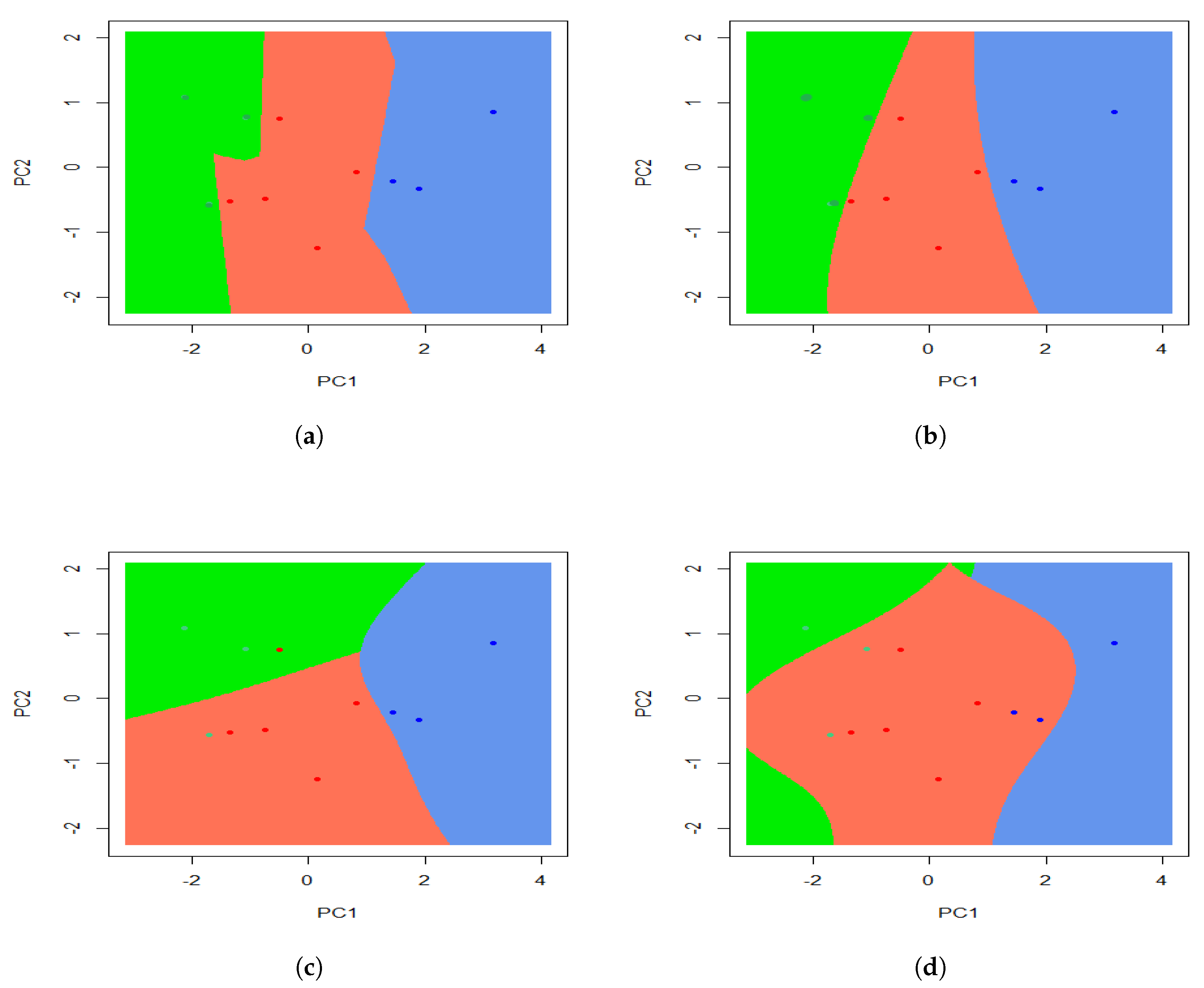
3.3.3. Classification Algorithms
- Distance-based: K-Nearest Neighbors (KNN).
- Model-based: Support Vector Machine (SVM).
- Density-based: Bayesian classifier (BC).
- Heuristic: Decision Tree (DT).
4. Results and Discussion
4.1. Data Reduction
4.2. Classification Performance
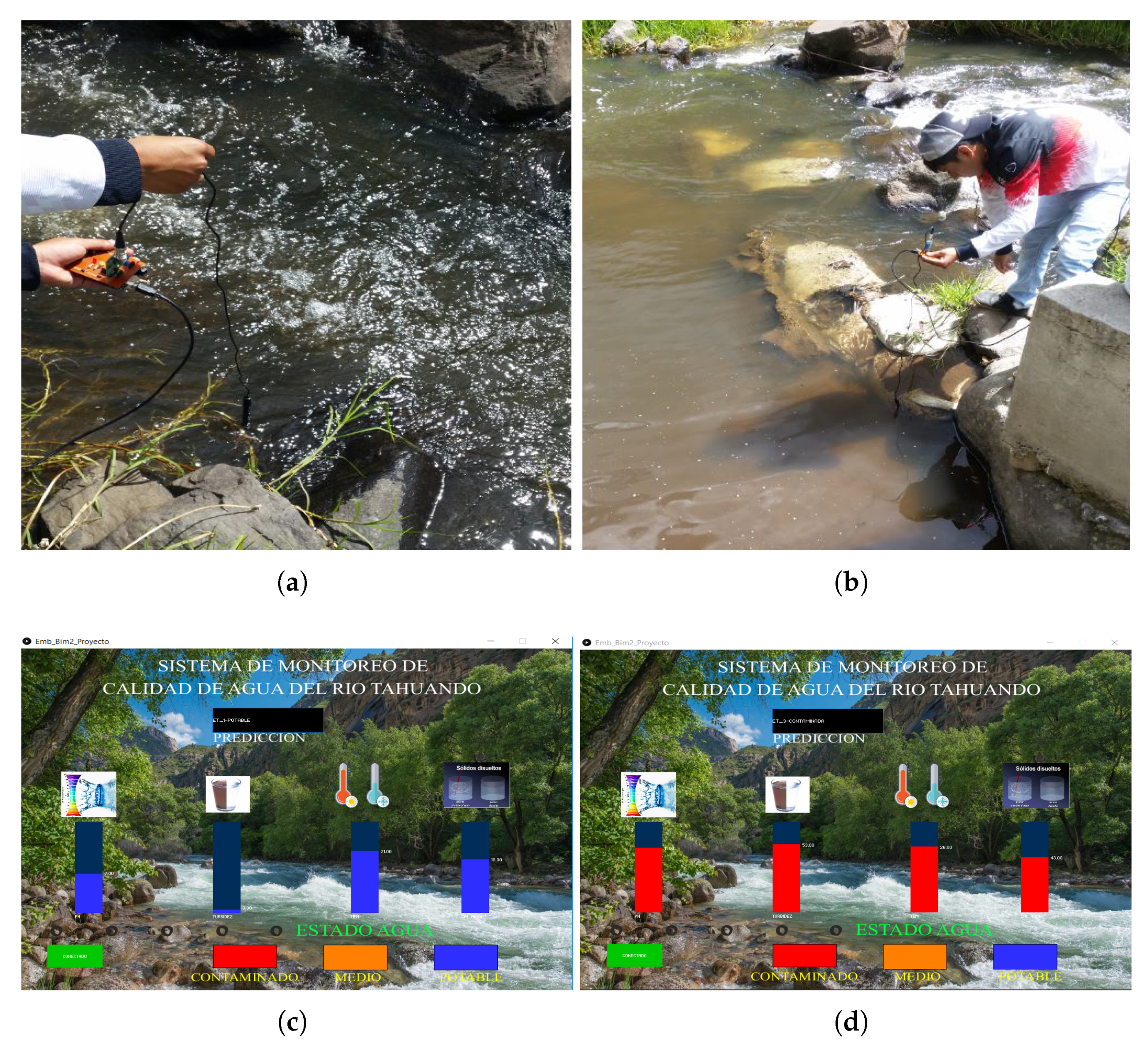
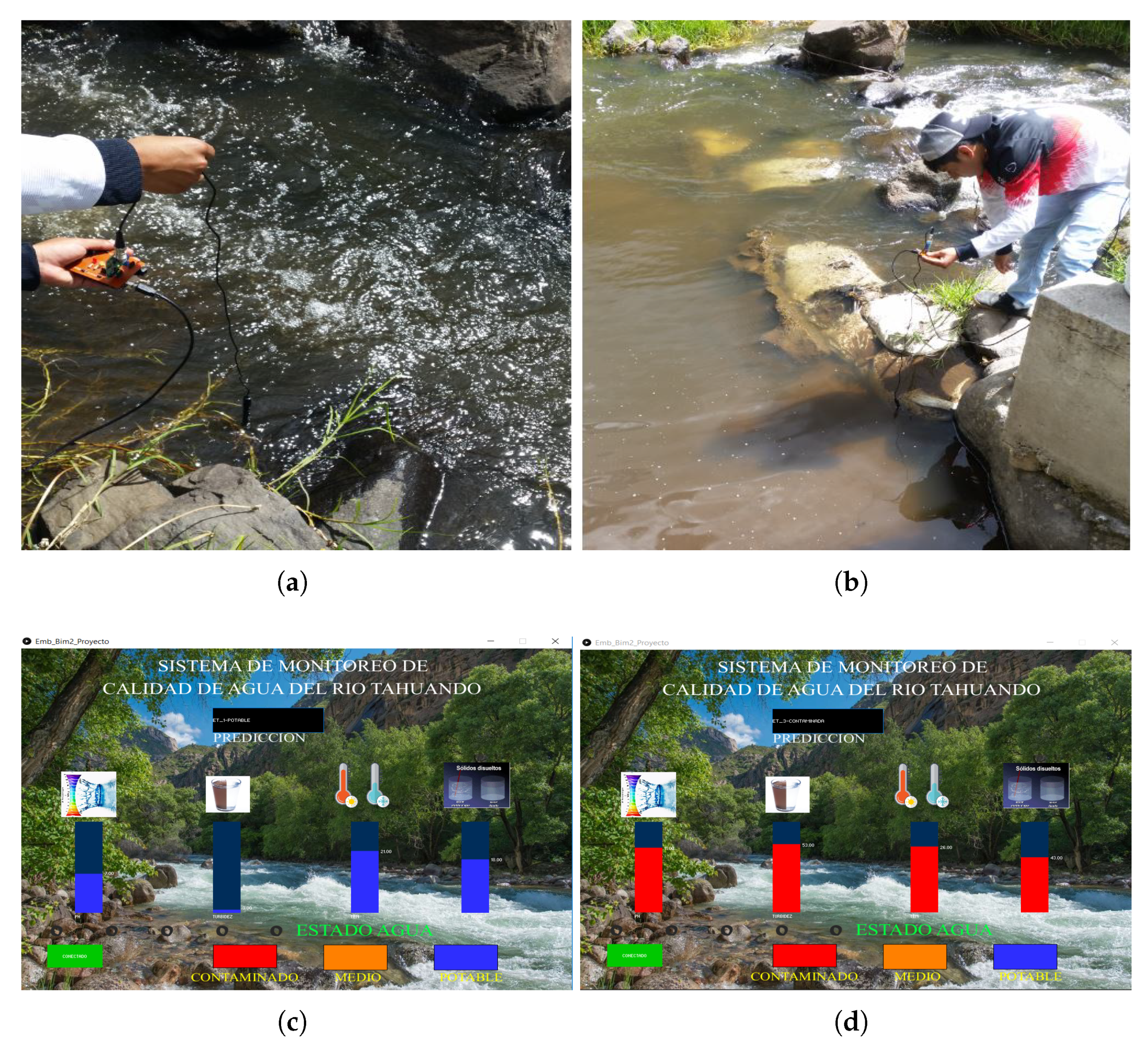
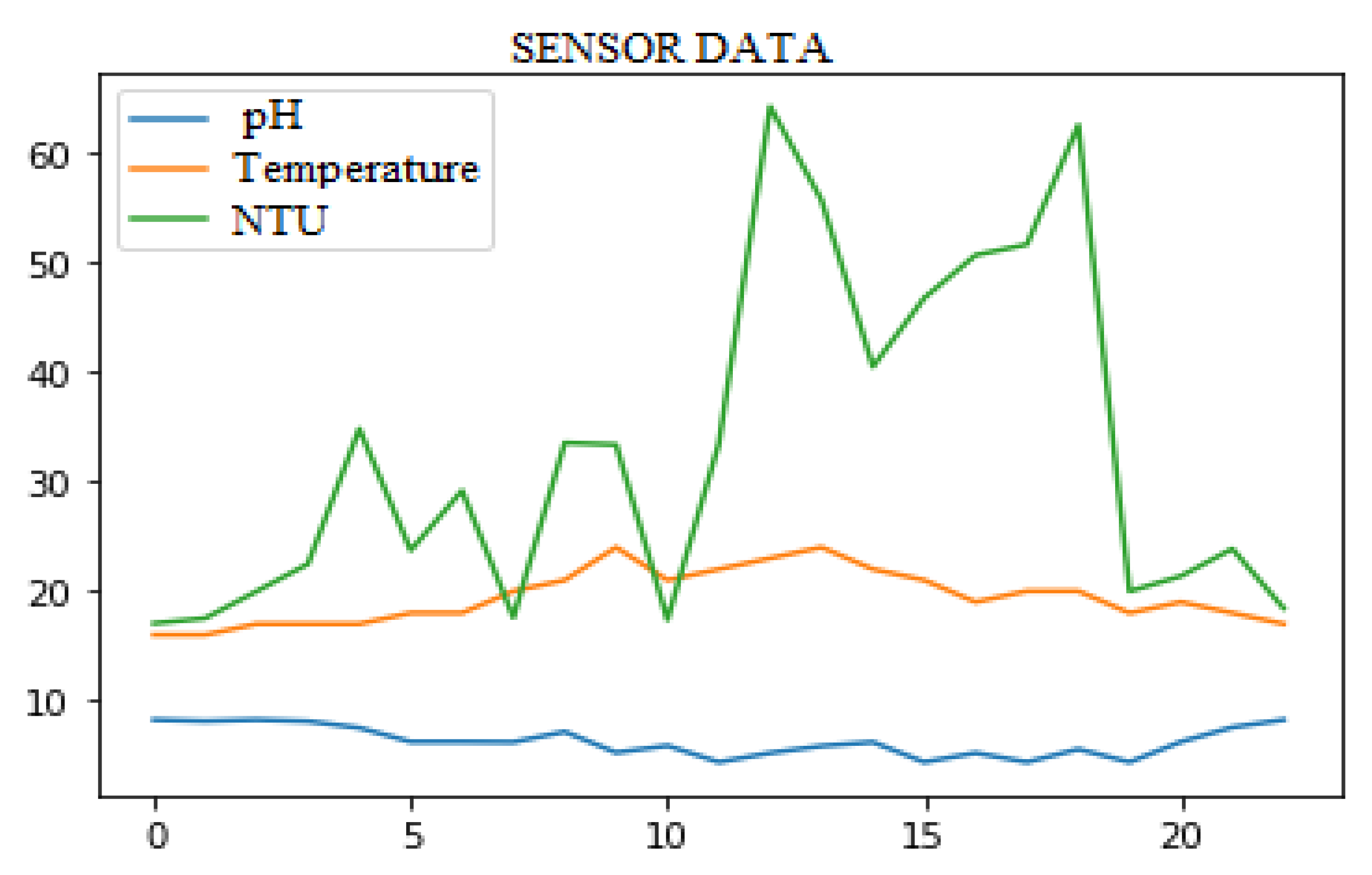
4.3. Implementation and Testing
5. Final Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Venancio Cruz, D.; Rivelino Gomes de Oliveira, M.; Cunha Filho, M.; Venancio da Cruz, D. Monitoring pH with quality control based on Geostatistics Methodology. IEEE Lat. Am. Trans. 2016, 14, 4787–4791. [Google Scholar] [CrossRef]
- Yang, C.; Wang, X. The water quality and pollution character in QingShuiHai lake valley-typical urban drinking water sources. In Proceedings of the 2011 International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, China, 24–26 June 2011; pp. 7287–7291. [Google Scholar]
- Zhang, Z.; Zhang, F.; Xu, C.; Xu, J.; Zhang, W.; Qi, Q. Study on the water environment capacity for the typical watershed in Taizihe River. In Proceedings of the 2011 International Symposium on Water Resource and Environmental Protection, Xi’an, China, 20–22 May 2011; Volume 1, pp. 486–488. [Google Scholar]
- Randhawa, S.; Sandha, S.S.; Srivastava, B. A Multi-sensor Process for In-Situ Monitoring of Water Pollution in Rivers or Lakes for High-Resolution Quantitative and Qualitative Water Quality Data. In Proceedings of the 2016 IEEE Intl Conference on Computational Science and Engineering (CSE) and IEEE Intl Conference on Embedded and Ubiquitous Computing (EUC) and 15th Intl Symposium on Distributed Computing and Applications for Business Engineering (DCABES), Paris, France, 24–26 August 2016; pp. 122–129. [Google Scholar] [CrossRef]
- Zhai, C.; Huang, Q.; Chang, J.; Gao, F. The study of water resources reasonable allocation of BaoJi area in Wei River with considering the ecology base flow. In Proceedings of the 2011 International Symposium on Water Resource and Environmental Protection, Xi’an, China, 20–22 May 2011; pp. 816–818. [Google Scholar] [CrossRef]
- Guo, W.; Chen, J.; Sheng, Y.; Wang, J. Integrated evaluation of water quality and quantity of the Wei River reach in Shaanxi Province. In Proceedings of the 2011 International Symposium on Water Resource and Environmental Protection, Xi’an, China, 20–22 May 2011; pp. 863–866. [Google Scholar] [CrossRef]
- Zhang, H.; Xie, X.; Hou, J. Water pollution accident control and urban safety water supply. In Proceedings of the 2011 2nd IEEE International Conference on Emergency Management and Management Sciences, Beijing, China, 8–10 August 2011; pp. 37–40. [Google Scholar]
- De Agua, S. Biblioteca—Secretaría del Agua. Available online: https://www.agua.gob.ec/ (accessed on 1 January 2020).
- Wang, J.; Guo, X.; Zhao, W.; Meng, X. Research on water environmental quality evaluation and characteristics analysis of TongHui River. In Proceedings of the 2011 International Symposium on Water Resource and Environmental Protection, Xi’an, China, 20–22 May 2011; pp. 1066–1069. [Google Scholar] [CrossRef]
- Taufiqurrahman; Tamami, N.; Putra, D.A.; Harsono, T. Smart sensor device for detection of water quality as anticipation of disaster environment pollution. In Proceedings of the 2016 International Electronics Symposium (IES), Denpasar, Indonesia, 29–30 September 2016; pp. 87–92. [Google Scholar] [CrossRef]
- Rosero-Montalvo, P.D.; Pijal-Rojas, J.; Vasquez-Ayala, C.; Maya, E.; Pupiales, C.; Suarez, L.; Benitez-Pereira, H.; Peluffo-Ordonez, D. Wireless Sensor Networks for Irrigation in Crops Using Multivariate Regression Models. In Proceedings of the 2018 IEEE Third Ecuador Technical Chapters Meeting (ETCM), Cuenca, Ecuador, 15–19 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Ragnoli, M.; Barile, G.; Leoni, A.; Ferri, G.; Stornelli, V. An Autonomous Low-Power LoRa-Based Flood-Monitoring System. Low Power 2020, 10, 15. [Google Scholar] [CrossRef]
- Alippi, C. Intelligence for Embedded Systems; Springer: Berlin/Heidelberg, Germany, 2014; pp. 1–283. [Google Scholar] [CrossRef] [Green Version]
- Rosero-Montalvo, P.D.; Batista, V.F.L.; Rosero, E.A.; Jaramillo, E.D.; Caraguay, J.A.; Pijal-Rojas, J.; Peluffo-Ordóñez, D.H. Intelligence in Embedded Systems: Overview and Applications; Springer: Cham, Switzerland, 2019; pp. 874–883. [Google Scholar] [CrossRef]
- Guo, M.; Zhou, X. Research on the water environment capacity of Chanba River downstream. In Proceedings of the 2011 International Conference on Electric Technology and Civil Engineering (ICETCE), Lushan, China, 22–24 April 2011; pp. 4411–4414. [Google Scholar] [CrossRef]
- Patel, H.J.; Dabhi, V.K.; Prajapati, H.B. River Water Pollution Analysis using High Resolution Satellite Images: A Survey. In Proceedings of the 2019 5th International Conference on Advanced Computing & Communication Systems (ICACCS), Coimbatore, India, 15–16 March 2019; pp. 520–525. [Google Scholar] [CrossRef]
- Shukla, A.K.; Ojha, C.S.P.; Garg, R.D. Surface water quality assessment of Ganga River Basin, India using index mapping. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 5609–5612. [Google Scholar] [CrossRef]
- Lin, Z.; Wang, W.; Yin, H.; Jiang, S.; Jiao, G.; Yu, J. Design of Monitoring System for Rural Drinking Water Source Based on WSN. In Proceedings of the 2017 International Conference on Computer Network, Electronic and Automation (ICCNEA), Xi’an, China, 23–25 September 2017; pp. 289–293. [Google Scholar]
- Sowmya, C.; Naidu, C.D.; Somineni, R.P.; Reddy, D.R. Implementation of Wireless Sensor Network for Real Time Overhead Tank Water Quality Monitoring. In Proceedings of the 2017 IEEE 7th International Advance Computing Conference (IACC), Hyderabad, India, 5–7 January 2017; pp. 546–551. [Google Scholar]
- Chen, F.; Wen, F.; Jia, H. Algorithm of Data Compression Based on Multiple Principal Component Analysis over the WSN. In Proceedings of the 2010 6th International Conference on Wireless Communications Networking and Mobile Computing (WiCOM), Chengdu, China, 14 October 2010; pp. 1–4. [Google Scholar]
- Kadir, E.A.; Irie, H.; Rosa, S.L. River Water Pollution Monitoring using Multiple Sensor System of WSNs (Case: Siak River, Indonesia). In Proceedings of the 2019 6th International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Bandung, Indonesia, 18–20 September 2019; pp. 75–79. [Google Scholar]
- Zhang, Z. Data Fusion Optimization Analysis of Wireless Sensor Networks Based on Joint DS Evidence Theory and Matrix Analysis. In Proceedings of the 2019 4th International Conference on Mechanical, Control and Computer Engineering (ICMCCE), Hohhot, China, 24–26 October 2019; pp. 689–6894. [Google Scholar]
- Torres, A.J.; Quezada, M.; Carrion, L.; Coronel, I.; Barragen, A. AHP analysis to minimize the effects produced by the textile industry in the rivers of Cuenca city. In Proceedings of the 2017 IEEE Mexican Humanitarian Technology Conference (MHTC), Puebla, Mexico, 29–31 March 2017; pp. 94–101. [Google Scholar] [CrossRef]
- De Estadística y sensos, I.N. Fasículo Provincial de Imbabura. Available online: https://www.ecuadorencifras.gob.ec/institucional/home/ (accessed on 1 January 2020).
- Encarnación, D.; Enríquez, J.; Suarez, L. Derecho De La Naturaleza: Caso Rio Tahuando; Technical Report; Universidad Andina Simń Bolivar: Ambato, Ecuador, 2012. [Google Scholar]
- Liu, J.; Deng, Z. Self-tuning weighted measurement fusion Wiener filter for autoregressive moving average signals with coloured noise and its convergence analysis. IET Control. Theory Appl. 2012, 6, 1899–1908. [Google Scholar] [CrossRef]
- Rosero-Montalvo, P.D.; López-Batista, V.F.; Peluffo-Ordóñez, D.H.; Erazo-Chamorro, V.C.; Arciniega-Rocha, R.P. Multivariate Approach to Alcohol Detection in Drivers by Sensors and Artificial Vision. In From Bioinspired Systems and Biomedical Applications to Machine Learning; Ferrández Vicente, J.M., Álvarez-Sánchez, J.R., de la Paz López, F., Toledo Moreo, J., Adeli, H., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 234–243. [Google Scholar]
- Antolín, D.; Medrano, N.; Calvo, B. Analysis of the operating life for battery-operated wireless sensor nodes. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 3883–3886. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | ||||
|---|---|---|---|---|
| Measure | SENO189 (turbidity) | PH-7BNC (pH) | Ds18b20 (temperature) | RB-Dfr-797 (TDS) |
| Precision | 7 ± | 3 ± | 5 ± | 5 ± |
| Reproducibility | It is necessary to wait up 2 s for calibration to be done | Adequate | Adequate | Some reading errors |
| Stability | Adequate | 3 ±, variable for each test | Adequate | Adequate |
| PS Algorithm | Exec. Time (s) | Remv. Inst | % of Remv. Inst |
|---|---|---|---|
| AENN | 3.17 | 0 | 0 |
| BBNR | 125.23 | 102 | 25.18 |
| CNN | 2.28 | 394 | 97.28 |
| DROP1 | 130.63 | 399 | 98.51 |
| DROP2 | 230.28 | 354 | 87.407 |
| DROP3 | 264.97 | 354 | 87.40 |
| ENG | 250 | 210 | 51.85 |
| ENN | 0.72 | 0 | 0 |
| RNN | 2.39 | 394 | 97.28 |
| Classifier | Matrix X% | CNN% | DROP1% | DROP3% |
|---|---|---|---|---|
| Accuracy | ||||
| k-NN | 97.6 | 90.6 | 93.6 | 95 |
| Bayesian classifier | 95 | 87.5 | 82.6 | 0.99 |
| Decision Trees | 99.3 | 66.9 | 33.33 | 33.33 |
| SVM (Polynomial kernel) | 100 | 75 | 75.3 | 92.14 |
| SVM (Sigmoide kernel) | 100 | 75 | 92 | 100 |
| Sensitivity | ||||
| k-NN | 96.6 | 88.3 | 91.6 | 93.3 |
| Bayesian classifier | 93.3 | 75 | 76 | 97.3 |
| Decision Trees | 99.3 | 33 | 33.33 | 33.33 |
| SVM (Polynomial kernel) | 100 | 94 | 66.9 | 92.14 |
| SVM (Sigmoide kernel) | 100 | 50 | 90 | 100 |
| Specificity | ||||
| k-NN | 98.2 | 93.6 | 95.3 | 96.6 |
| Bayesian classifier | 96.6 | 88.6 | 88 | 99.3 |
| Decision Trees | 99.6 | 66.9 | 33.33 | 33.33 |
| SVM (Polynomial kernel) | 100 | 97 | 89 | 100 |
| SVM (Sigmoide kernel) | 100 | 100 | 94 | 100 |
| Precision | ||||
| k-NN | 96.3.0 | 98.3 | 89.3 | 93.3 |
| Bayesian classifier | 93.3 | 100 | 66.6 | 98.3 |
| Decision Trees | 93.3 | 33.9 | 33.33 | 33.33 |
| SVM (Polynomial kernel) | 100 | 93 | 89 | 93.13 |
| SVM (Sigmoid kernel) | 100 | 50 | 86.6 | 100 |
| Classification | Exec. Time (s) | QMB Value | |
|---|---|---|---|
| algorithm | CNN% | DROP1% | |
| k-NN | 1.21 | 72.85 | 76.20 |
| Bayesian | 1.85 | 46.01 | 43.97 |
| Decision Tree | 0.77 | 42.06 | 42.63 |
| SVM (polynomial kernel) | 5.2 | 14.03 | 14.2 |
| SVM (sigmoide kernel) | 6.1 | 11.96 | 12.11 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosero-Montalvo, P.D.; López-Batista, V.F.; Riascos, J.A.; Peluffo-Ordóñez, D.H. Intelligent WSN System for Water Quality Analysis Using Machine Learning Algorithms: A Case Study (Tahuando River from Ecuador). Remote Sens. 2020, 12, 1988. https://doi.org/10.3390/rs12121988
Rosero-Montalvo PD, López-Batista VF, Riascos JA, Peluffo-Ordóñez DH. Intelligent WSN System for Water Quality Analysis Using Machine Learning Algorithms: A Case Study (Tahuando River from Ecuador). Remote Sensing. 2020; 12(12):1988. https://doi.org/10.3390/rs12121988
Chicago/Turabian StyleRosero-Montalvo, Paul D., Vivian F. López-Batista, Jaime A. Riascos, and Diego H. Peluffo-Ordóñez. 2020. "Intelligent WSN System for Water Quality Analysis Using Machine Learning Algorithms: A Case Study (Tahuando River from Ecuador)" Remote Sensing 12, no. 12: 1988. https://doi.org/10.3390/rs12121988