Improving the Accuracy of Automatic Reconstruction of 3D Complex Buildings Models from Airborne Lidar Point Clouds


Abstract
1. Introduction
- Creating detailed three-dimensional topographic maps;
2. Spatial Data
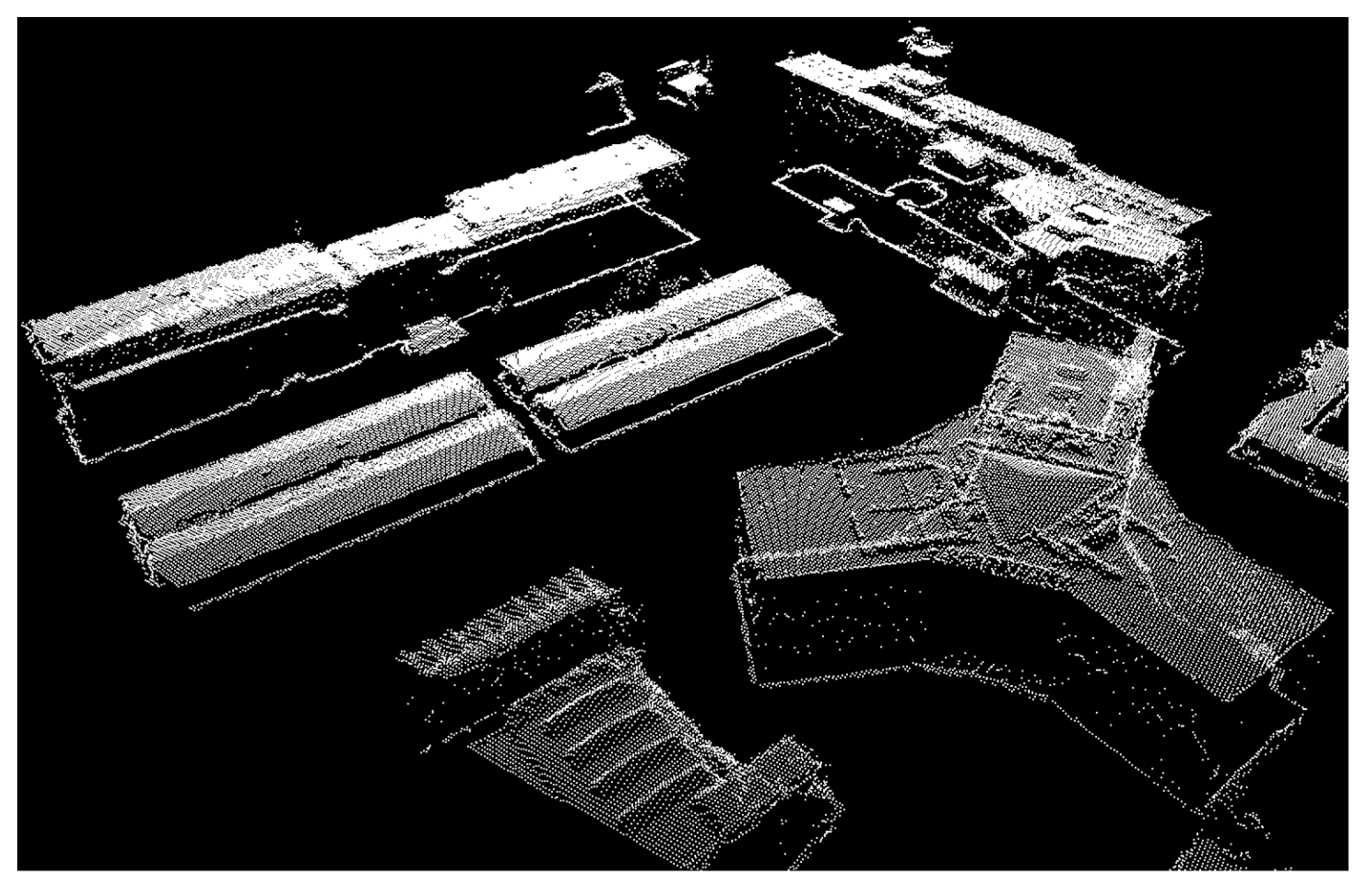
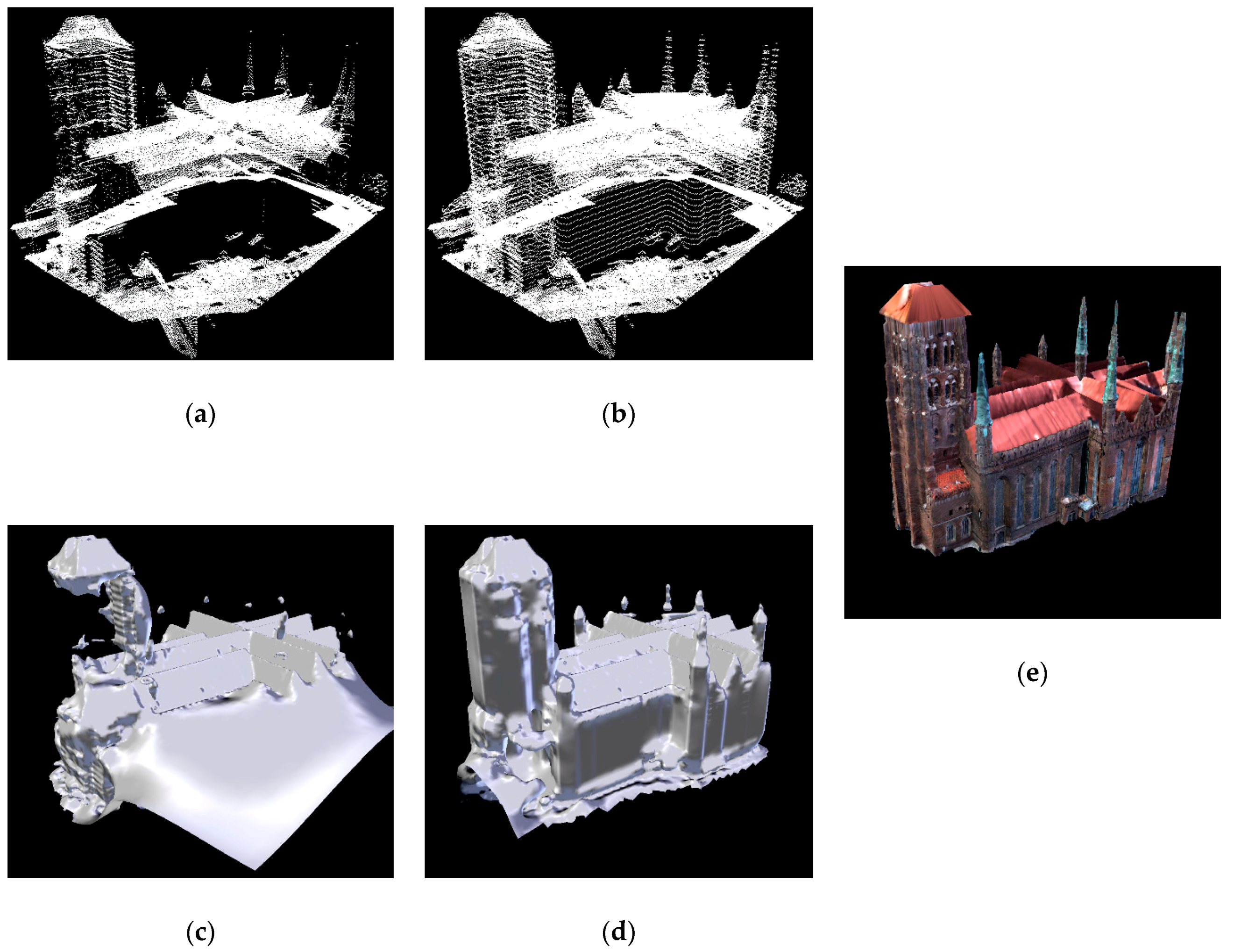
2.1. LiDAR Point Clouds
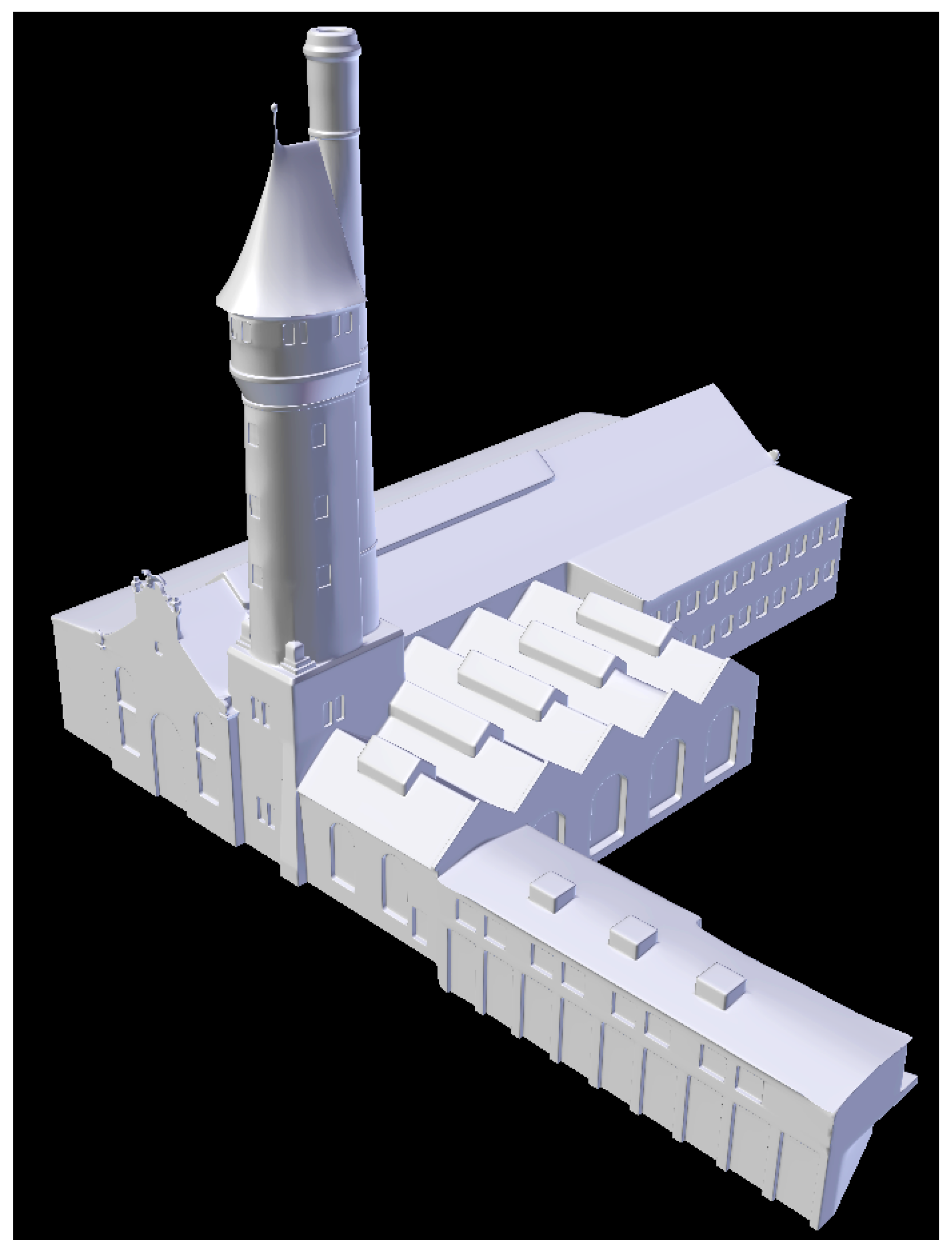
2.2. Reference Meshes
3. The Algorithm
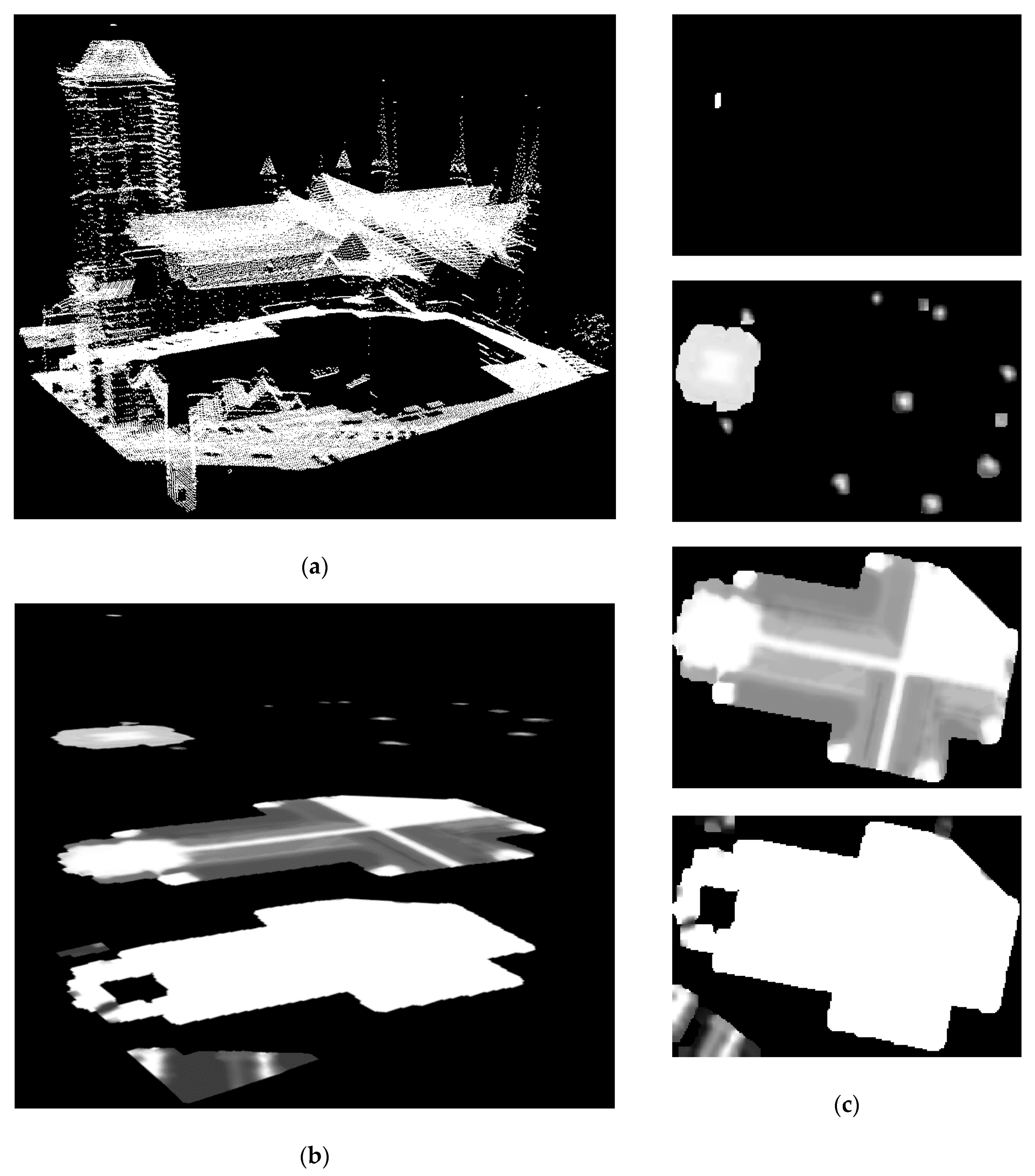
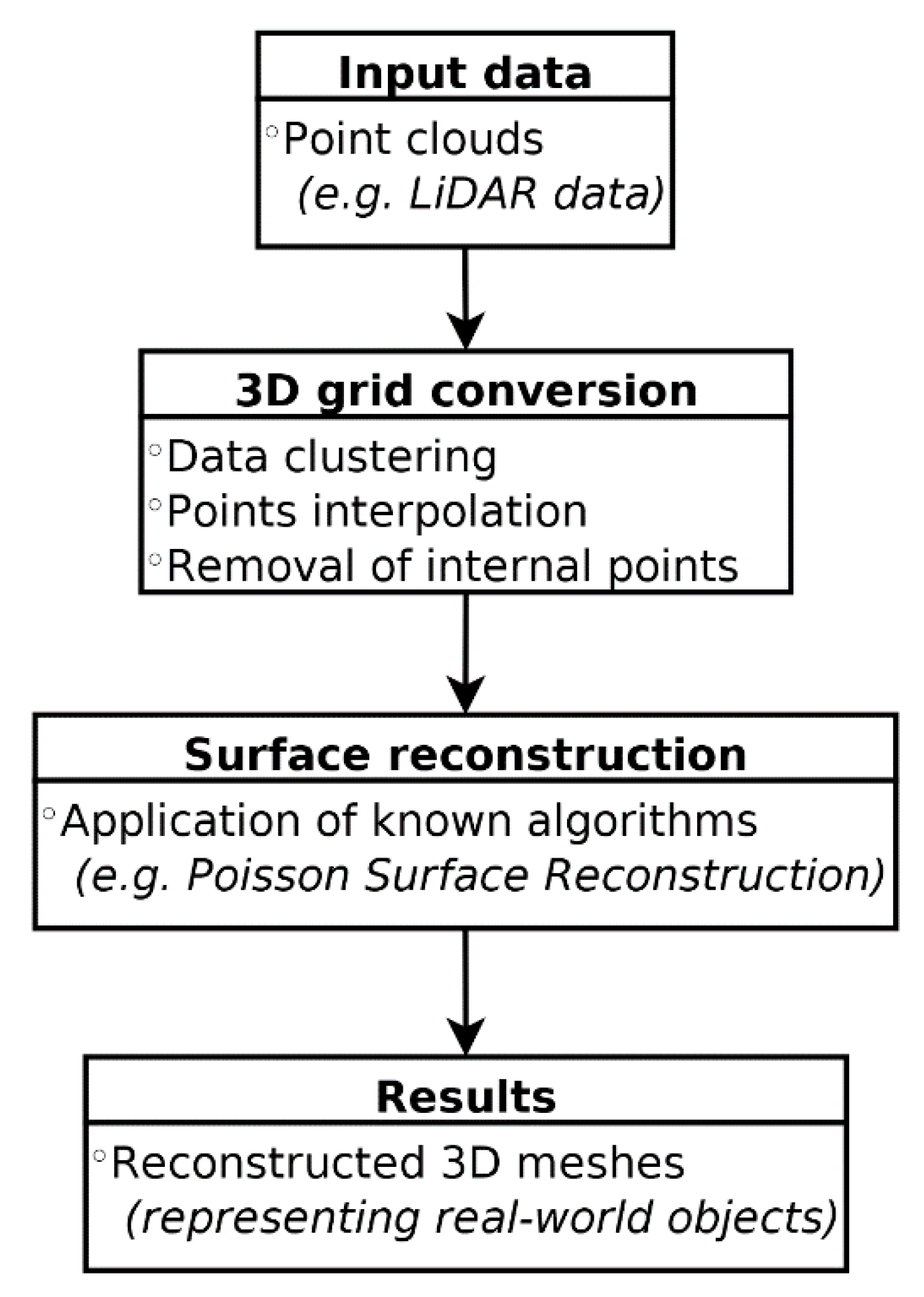
- Clustering of input data by assigning every point to a single sector of a regular three-dimensional array. Each sector corresponds to an area in space represented by a cuboid;
- Interpolating new points inside empty sectors if there are any other points nearby;
- Removing any internal points of the object and leaving only those that represent the outer boundaries of the object.
ny = Δy/ry
nz = Δz/rz
- The hybrid mode option, which combines the generated set of points with the original input point cloud. Using this option reduces the regularity level of the resulting data set, but allows to more accurately reproduce the characteristic elements found in the original data;
- Option to fill empty set elements within a single grid level. Enabling this option will fill in individual empty sectors based on data from its nearest neighbors;
- The level of filling the empty elements between each level of the grid. This action is aimed at reducing the number of “holes” located in planes perpendicular to the ground. At each level of the grid, in order from lowest to highest, all empty points are searched and then for each of them the closest non-empty point directly above it (along the Z axis) is found. If the distance between these points does not exceed a certain value, then the value of the empty point is replaced by the value of the point directly above it. Passing this parameter to the input of the algorithm in many cases allows to supplement a significant part of the surface of the vertical walls, but in rare cases it can also generate new points in spaces that should remain empty, e.g., when the point cloud represents an object containing horizontal elements protruding above ground surface;
- The intensity of the filtration used to mitigate the large differences in values between adjacent sectors at different levels of the grid. The value of this parameter is used to create a kernel for the simple low-pass filter, both dimensions of which are calculated according to (2). For each processed sector, its new height is set by this lowpass filtration to the value of the sum of its height and the height of its neighbors, divided by the number of sectors included in the calculation. This filtration is useful in situations where the data contains sets of irregularly distributed points representing oblique surfaces, such as roofs of buildings. Naturally, setting the blur_level parameter to 1 will result in using a 3×3 kernel, which is often considered as a minimum size in computer graphics.
- Output hybridization, which merges the generated set of points with the original input point cloud. Using this parameter reduces the level of regularity of the resulting data set, but allows for a more accurate mapping of certain characteristic elements appearing in the original data;
- Reconstructing empty elements in the set within a single grid level. Using this parameter populates individual empty sectors based on data from its nearest neighbors;
- The level range at which empty elements of the point cloud are reconstructed between individual levels of the grid. This action is aimed at reducing the number of missing points of data in planes perpendicular to the ground. At each level of the grid, in the order from the lowest to the highest, all empty spaces are identified and then for each of them the nearest existing points in the vertical plane are found. If the distance between these points does not exceed a certain value, then the empty space is replaced by a value interpolated between those points;
- Filtering intensity used to alleviate large differences in value between adjacent sectors at different levels of the grid. The value of this parameter is used to create a matrix for the needs of a simple low-pass filter. This filtration is useful when a processed set of points contains groups of irregularly distributed points representing oblique surfaces such as building roofs.
- First, an auxiliary sector classification is created, dividing the set into two classes, describing the empty and filled sectors, respectively;
- Then a new class is introduced, representing the edges of the outer surfaces containing filled sectors which are directly adjacent to empty sectors. As a result of this operation, the newly created class will represent the edge points of the object.
- Finally, all points that are not classified as edge points are removed from the highest level in the set. In addition, points that have not been previously classified as edge points are removed from the remaining levels if other points exist directly above them (in an adjacent level).
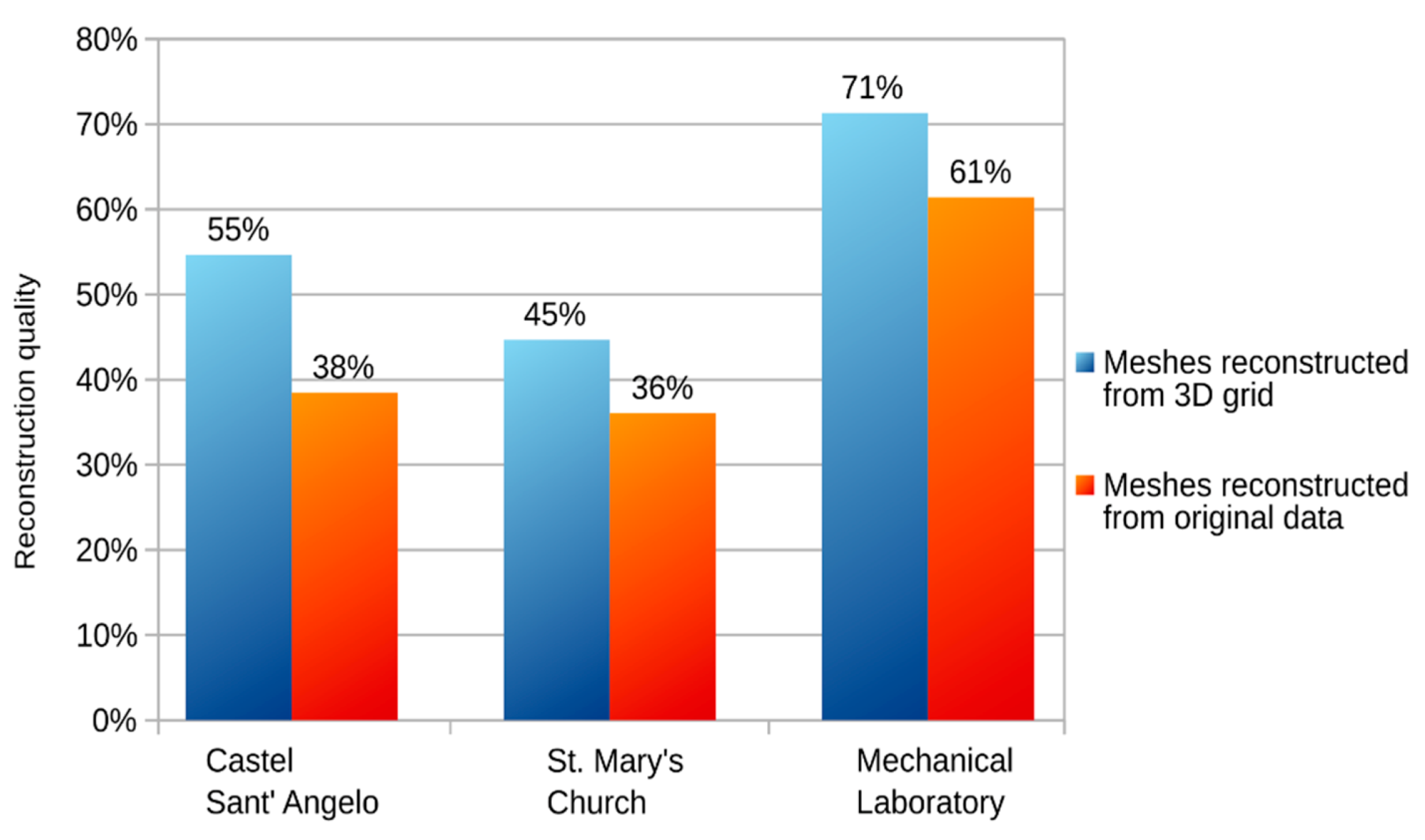
3.1. Determining Mesh Quality
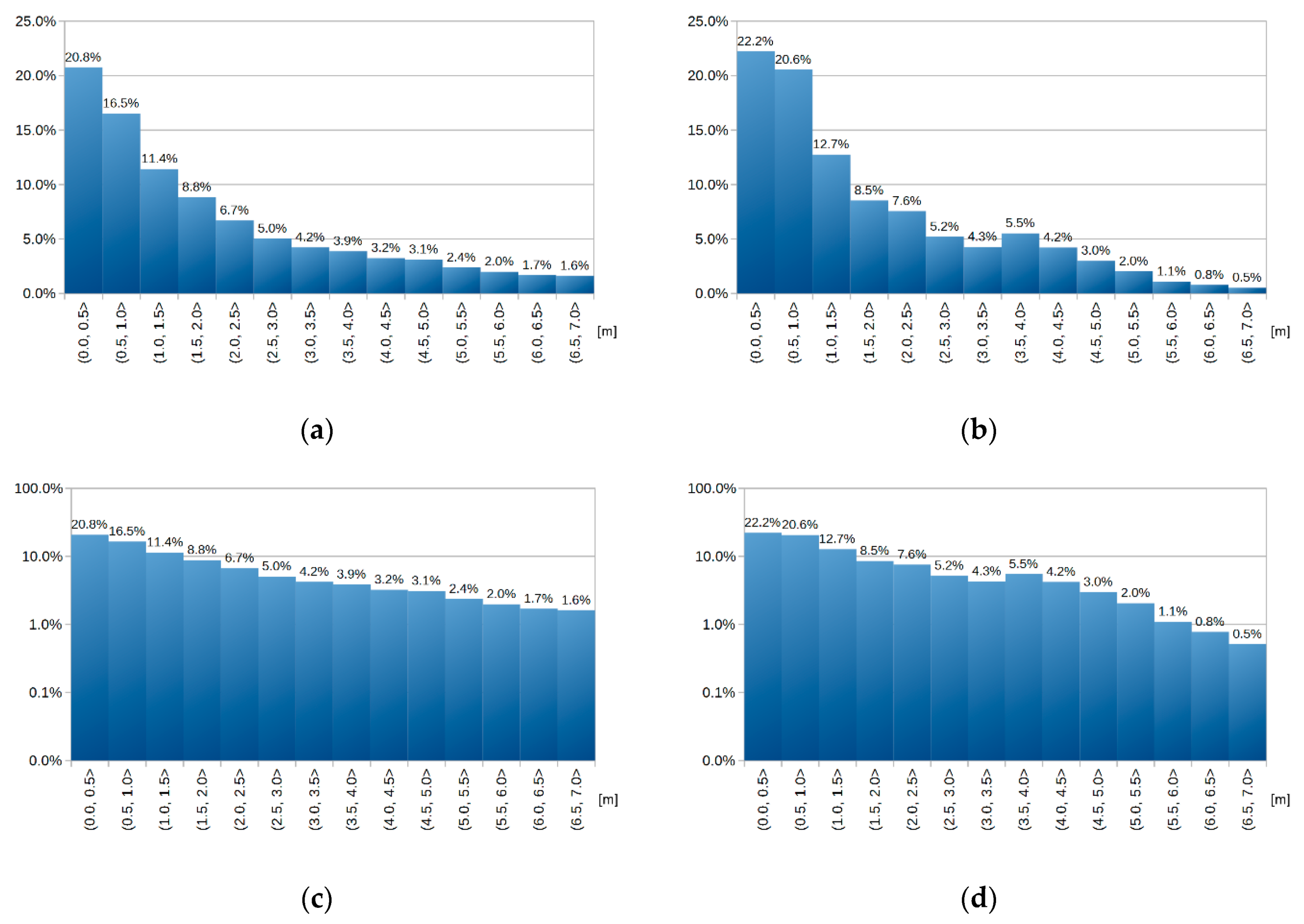
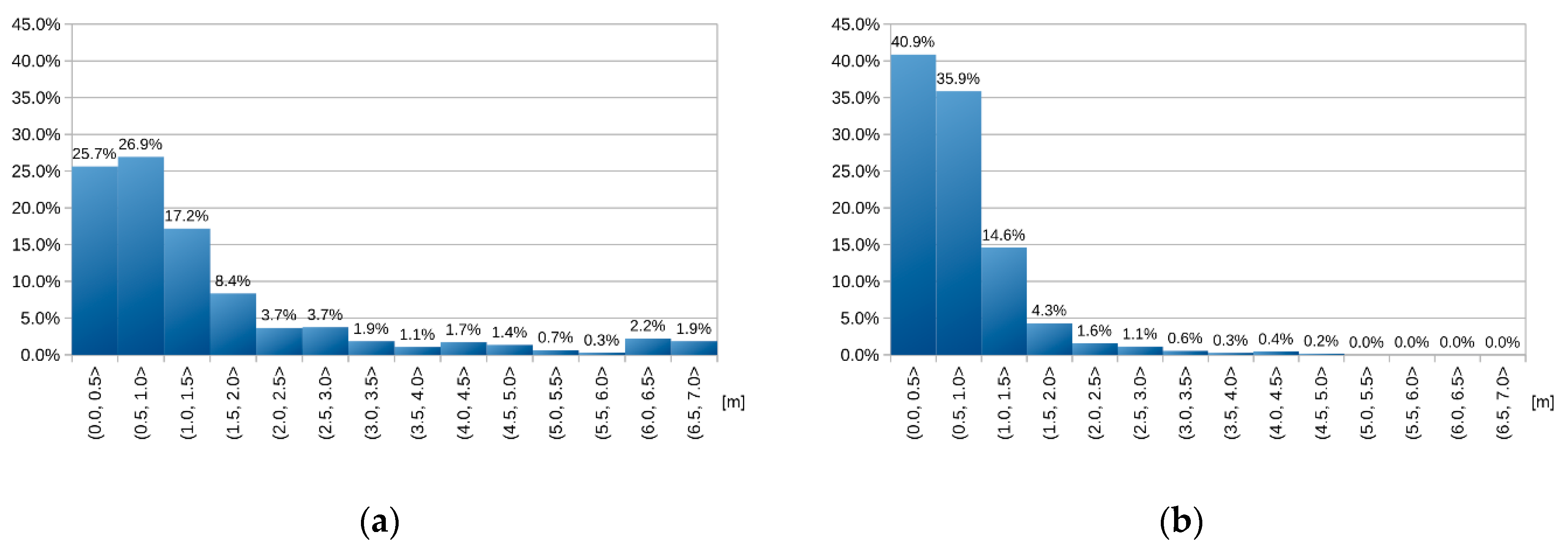
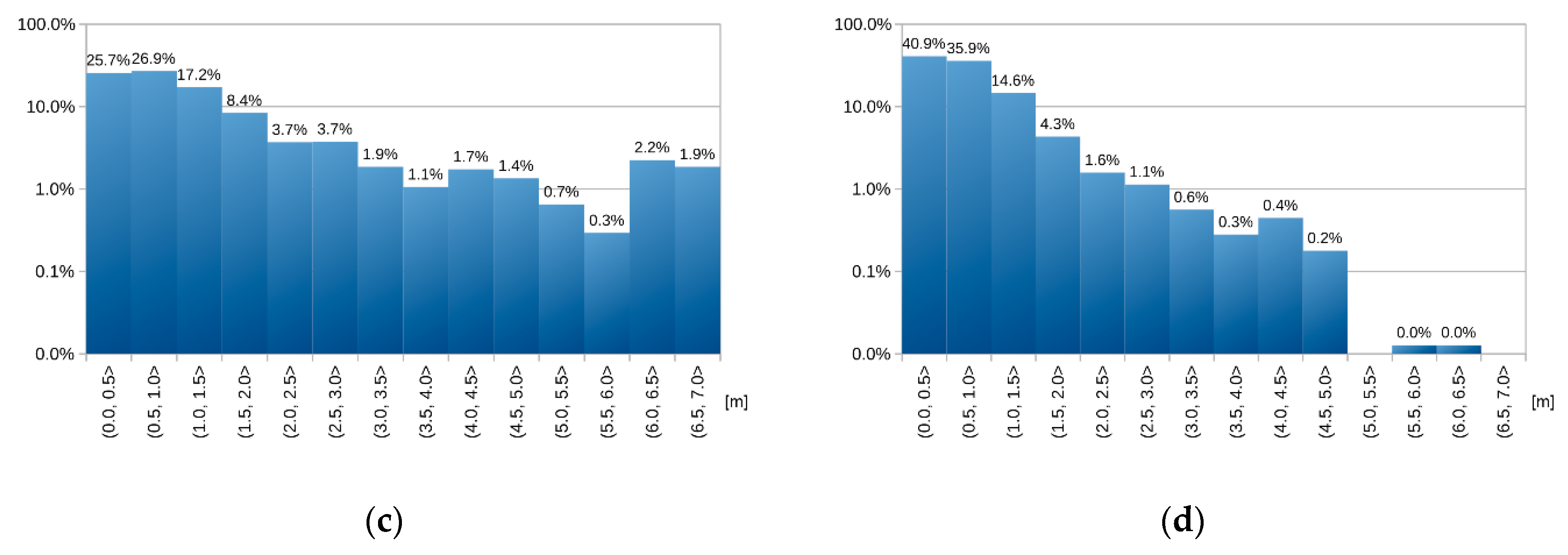
- The smallest, average and largest distance between the vertices of model G and the nearest vertices of model R. Obviously, a perfectly reproduced model R should have the smallest possible values of these distances;
- Vertex position accuracy (expressed as a percentage), being understood here as the number of vertices on G for which the distances to the corresponding vertices on R do not exceed a certain value (this value was experimentally established as one meter), divided by the number of all vertices on G. If R contains numerous distortions or “holes”, it should be expected that the calculated value will be low;
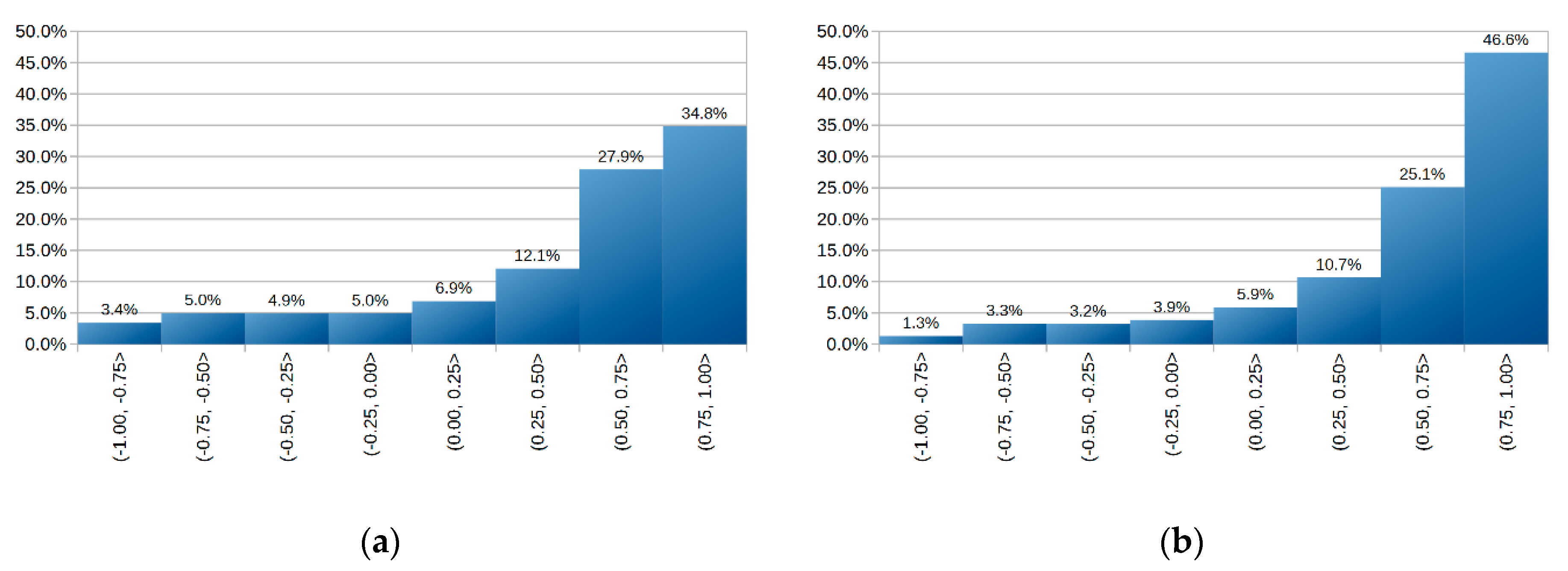
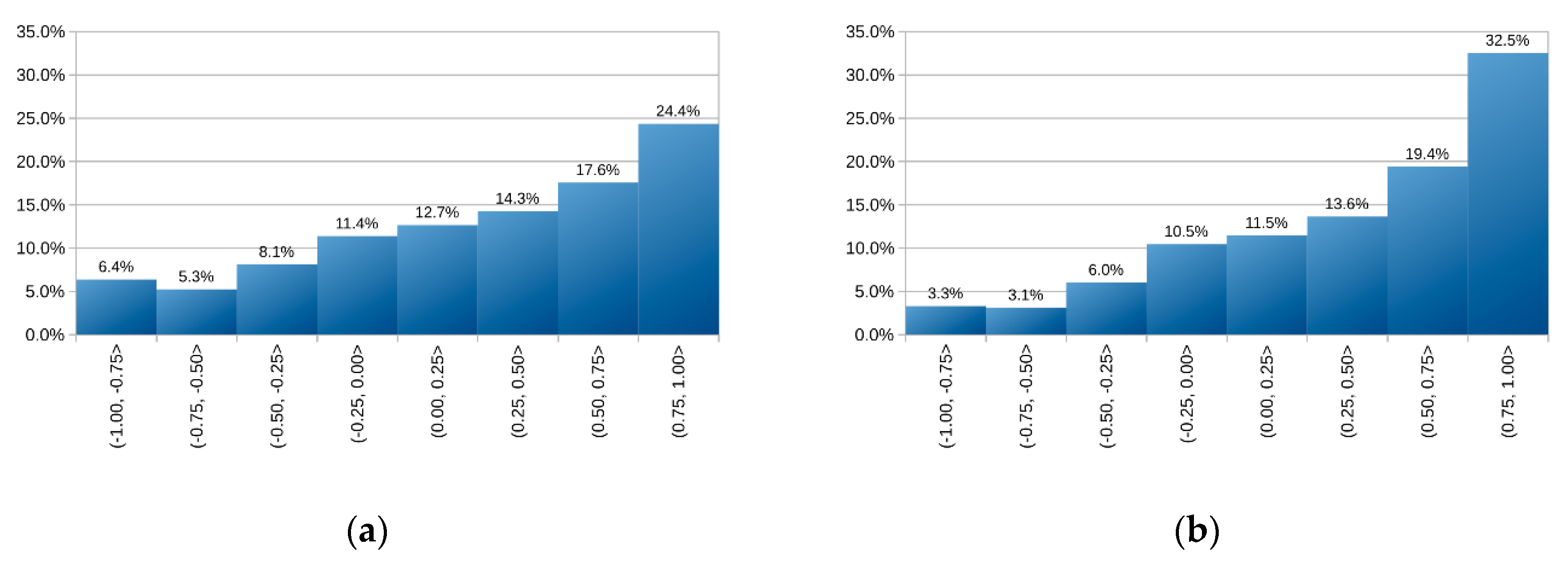
- The smallest, average and largest differences between respective normal vectors of G and R, where this difference is defined as dot product of normal vectors of vertices. It is worth noting that dot product returns values in the range of <-1, 1> where -1 means that both vectors are parallel to each other, but they have opposite turns, 0 means that these vectors are perpendicular to each other and 1 means that both vectors have the same direction. Since the normal of a given vertex is by definition a unit vector, a dot product equal to 1 for normal vectors of two corresponding vertices would denote the perfect match;
- The accuracy of normal vectors (expressed as a percentage), understood here as the number of vertices in G for which the difference between respective normal vectors of G and R is not less than 0.75;
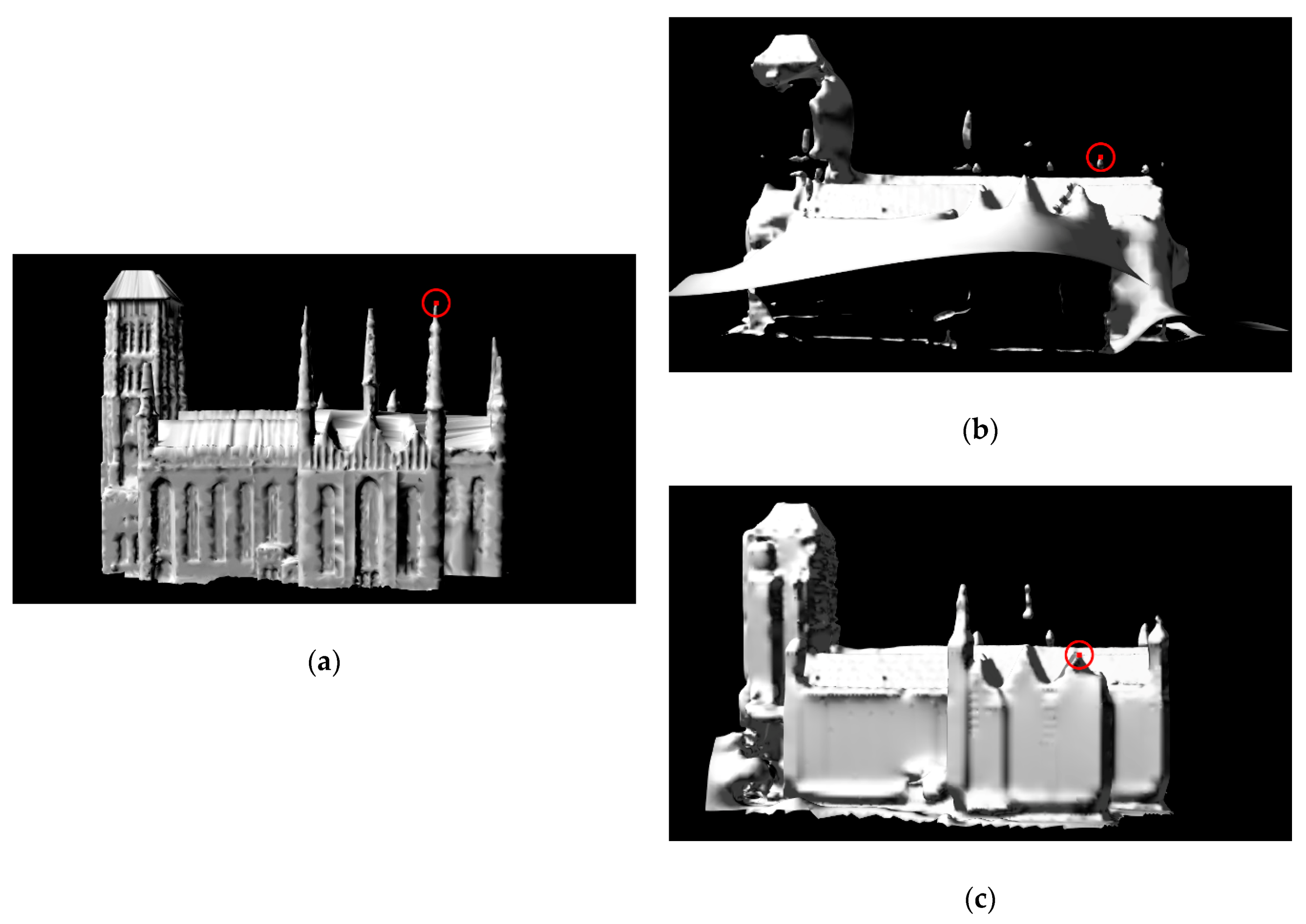
- The number of resulting solids, i.e., how many independent meshes the reconstructed model consists of. In the tested cases, it was assumed that the ideal model of the tested object should consist of a single solid.
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kulawiak, M.; Łubniewski, Z.; Bikonis, K.; Stepnowski, A. Geographical Information System for analysis of Critical Infrastructures and their hazards due to terrorism, man-originated catastrophes and natural disasters for the city of Gdansk. In Lecture Notes in Geoinformation and Cartography; Springer: Berlin/Heidelberg, Germany, 2009; pp. 251–262. [Google Scholar] [CrossRef]
- Drypczewski, K.; Moszyński, M.; Demkowicz, J.; Bikonis, K.; Stepnowski, A. Design of the Dual Constellation Gps/Galileo Mobile Device for Improving Navigation of the Visually Impaired in an Urban Area. Pol. Marit. Res. 2015, 22, 15–20. [Google Scholar] [CrossRef]
- Manferdini, A.M.; Russo, M. Multi-scalar 3D digitization of Cultural Heritage using a low-cost integrated approach. In Proceedings of the 2013 Digital Heritage International Congress (DigitalHeritage), Marseille, France, 28 October–1 November 2013; pp. 153–160. [Google Scholar]
- Pavlidis, G.; Koutsoudis, A.; Arnaoutoglou, F.; Tsioukas, V.; Chamzas, C. Methods for 3D digitization of Cultural Heritage. J. Cult. Herit. 2007, 8, 93–98. [Google Scholar] [CrossRef]
- Dąbrowski, J.; Kulawiak, M.; Moszyński, M.; Bruniecki, K.; Kamiński, Ł.; Chybicki, A.; Stepnowski, A. Real-time web-based GIS for analysis, visualization and integration of marine environment data. In Information Fusion and Geographic Information Systems; Springer: Berlin/Heidelberg, Germany, 2009; pp. 277–288. [Google Scholar] [CrossRef]
- Kulawiak, M.; Bikonis, K.; Stepnowski, A. Dedicated geographical information system in the context of critical infrastructure protection. In Proceedings of the 1st International Conference on Information Technology, Gdańsk, Poland, 19–21 May 2008; pp. 157–162. [Google Scholar]
- Rossetti, M.D.; Trzcinski, G.F.; Syverud, S.A. Emergency department simulation and determination of optimal attending physician staffing schedules. In Proceedings of the WSC’99. 1999 Winter Simulation Conference Proceedings. ‘Simulation - A Bridge to the Future’ (Cat. No.99CH37038), Phoenix, AZ, USA, 5–8 December 1999; Volume 2, pp. 1532–1540. [Google Scholar]
- Wang, Z.; Schenk, T. Building extraction and reconstruction from lidar data. Int. Arch. Photogramm. Remote Sens. 2000, 33(part B3), 958–964. [Google Scholar]
- Rost, H.; Grierson, H. High Precision Projects using LiDAR and Digitial Imagery. In Proceedings of the TS11-Imaging and Data Applications, Integrating Generations, FIG Working Week, Stockholm, Sweden, 14–19 June 2008. [Google Scholar]
- Nikic, D.; Wu, J.; Pauca, P.; Plemmons, R.; Zhang, Q. A novel approach to environment reconstruction in lidar and hsi datasets. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 11–14 September 2012; Volume 1, p. 81. [Google Scholar]
- Huber, M.; Schickler, W.; Hinz, S.; Baumgartner, A. Fusion of LIDAR data and aerial imagery for automatic reconstruction of building surfaces. Proceedings of 2003 2nd GRSS/ISPRS Joint Workshop on Remote Sensing and Data Fusion over Urban Areas, Berlin, Germany, 22–23.May.2003; pp. 82–86. [Google Scholar]
- Dharmapuri, S.; Tully, M. Evolution of Point Cloud. LIDAR Mag. 2018. Available online: https://lidarmag.com/2018/07/16/evolution-of-point-cloud/ (accessed on 28 November 2018).
- Floriani, L.D.; Magillo, P. Triangulated Irregular Network. In Encyclopedia of Database Systems; Springer: Boston, MA, USA, 2009; pp. 3178–3179. [Google Scholar] [CrossRef]
- Kazhdan, M.; Bolitho, M.; Hoppe, H. Poisson Surface Reconstruction. In Proceedings of the 4th Eurographics Symposium on Geometry Processing, Cagliari, Italy, 26–28 June 2006; pp. 61–70. [Google Scholar]
- Kada, M.; McKinley, L. 3D building reconstruction from LiDAR based on a cell decomposition approach. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2009, 38, 47–52. [Google Scholar]
- Kim, K.; Shan, J. Building roof modeling from airborne laser scanning data based on level set approach. Isprs J. Photogramm. Remote Sens. 2001, 66, 484–497. [Google Scholar] [CrossRef]
- Henn, A.; Gröger, G.; Stroh, V.; Plümer, L. Model driven reconstruction of roofs from sparse LIDAR point clouds. Isprs J. Photogramm. Remote Sens. 2013, 76, 17–29. [Google Scholar] [CrossRef]
- Cheng, L.; Tong, L.; Chen, Y.; Zhang, W.; Shan, J.; Liu, Y.; Li, M. Integration of LiDAR data and optical multi-view images for 3D reconstruction of building roofs. Opt. Lasers Eng. 2013, 51, 493–502. [Google Scholar] [CrossRef]
- Babahajiani, P.; Fan, L.; Kämäräinen, J.K.; Gabbouj, M. Urban 3D segmentation and modelling from street view images and LiDAR point clouds. Mach. Vis. Appl. 2017, 679–694. [Google Scholar] [CrossRef]
- Yi, C.; Zhang, Y.; Wu, Q.; Xu, Y.; Remil, O.; Wei, M.; Wang, J. Urban building reconstruction from raw LiDAR point data. Comput.-Aided Des. 2017, 1–14. [Google Scholar] [CrossRef]
- Chen, D.; Wang, R.; Peethambaran, J. Topologically aware building rooftop reconstruction from airborne laser scanning point clouds. IEEE Trans. Geosci. Remote Sens. 2017, 7032–7052. [Google Scholar] [CrossRef]
- Bauchet, J.P.; Lafarge, F. City reconstruction from airborne LiDAR: A computational geometry approach. 2019. Available online: https://easychair.org/publications/preprint/pLtR (accessed on 4 May 2020).
- Wang, R.; Peethambaran, J.; Dong, C. LiDAR Point Clouds to 3D Urban Models: A Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11. Available online: https://www.researchgate.net/publication/321500340_LiDAR_Point_Clouds_to_3D_Urban_Models_A_Review (accessed on 4 May 2020). [CrossRef]
- Kazhdan, M.; Hoppe, H. Screened Poisson Surface Reconstruction. Acm Trans. Graph. 2013, 32. [Google Scholar] [CrossRef]
- Bernardini, F.; Mittleman, J.; Ftushmeier, H.; Silva, C.; Taubin, G. The Ball-Pivoting Algorithm for Surface Reconstruction. IEEE Trans. Vis. Comput. Graph. 1999, 5, 349–359. [Google Scholar] [CrossRef]
- Tsai, V.J.D. Delaunay triangulations in TIN creation: An overview and a linear-time algorithm. Int. J. Geogr. Inf. Syst. 1993, 7, 501–524. [Google Scholar] [CrossRef]
- Amenta, N.; Choi, S.; Kolluri, R.K. The Power Crust. In Proceedings of the Sixth ACM Symposium on Solid Modeling and Applications, Ann Arbor, MI, USA, 6–8 June 2001; pp. 249–266. [Google Scholar]
- Kulawiak, M.; Łubniewski, Z. 3D Object Shape Reconstruction from Underwater Multibeam Data and Over Ground Lidar Scanning. Pol. Marit. Res. 2018, 25, 47–56. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L. Deep learning-based classification and reconstruction of residential scenes from large-scale point clouds. IEEE Trans. Geosci. Remote Sens. 2017, 1887–1897. [Google Scholar] [CrossRef]
- Tse, R.O.C.; Gold, C.M.; Kidner, D.B. Building reconstruction using LIDAR data. In Proceedings of the 4th ISPRS Workshop on Dynamic and Multi-dimensional GIS, Pontypridd, Wales, UK, 5–8 September 2005; pp. 156–161. [Google Scholar]
- Kulawiak, M.; Łubniewski, Z. Reconstruction Methods for 3D Underwater Objects Using Point Cloud Data. Hydroacoustics 2015, 18, 95–102. [Google Scholar]
- Polish Head Office of Geodesy and Cartography (GUGIK). Numerical elevation models. Available online: https://www.geoportal.gov.pl/en/dane/numeryczne-modele-wysokosciowe (accessed on 30 March 2020).
- blender.org - Home of the Blender project - Free and Open 3D Creation Software. Available online: https://www.blender.org/ (accessed on 30 March 2020).
- Kulawiak, M. Programmatic Simulation of Laser Scanning Products. In Proceedings of the IEEE SPA 2018 Signal Processing Algorithms, Architectures, Arrangements, and Applications, Poznań, Poland, 9–21 September 2018. [Google Scholar]
- OGRE - Open Source 3D Graphics Engine. Available online: https://www.ogre3d.org (accessed on 6 May 2020).
- CSA. Castelo De Santo Angelo (Castel Sant’Angelo). 3D Warehouse. Available online: https://3dwarehouse.sketchup.com/model/e6b5d74421f6aaf3ee1dec833bfa8b3/Castelo-De-Santo-Angelo-Castel-SantAngelo (accessed on 11 July 2018).
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; 2006; pp. 519–528. [Google Scholar]
- Cignoni, P.; Rocchini, C.; Scopigno, R. Metro: Measuring Error on Simplified Surfaces; Centre National de la Recherche Scientifique: Paris, France, 1996. [Google Scholar] [CrossRef]
- Lavoué, G. A Multiscale Metric for 3D Mesh Visual Quality Assessment. Comput Graph. Forum 2011, 30, 1427–1437. [Google Scholar] [CrossRef]
- Cignoni, P.; Callieri, M.; Corsini, M.; Dellepiane, M.; Ganovelli, F.; Ranzuglia, G. MeshLab: An Open-Source Mesh Processing Tool. In Proceedings of the Eurographics Italian Chapter Conference, Salerno, Italy, 2–4 July 2008. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensions of a Single Sector (XYZ) [m] | 0.5 × 0.5 × 2.0 |
|---|---|
| Option to fill empty elements within a single grid level | YES |
| Filtration intensity | 2 |
| The level of filling the empty elements between each level of the grid | 20 |
| Hybrid mode | YES |
| Criteria | Reconstruction from Original Data (R1) | Reconstruction from Processed Data (R2) |
|---|---|---|
| Minimum distance [cm] | 1.24 | 1.00 |
| Average distance [cm] | 259.84 | 189.83 |
| Maximum distance [m] | 20.81 | 27.66 |
| Vertex position accuracy at the threshold of one meter | 37.29% | 42.78% |
| The average difference between respective normal vectors | 0.45 | 0.57 |
| Normal vectors accuracy at the threshold of 0.75 | 34.82% | 46.62% |
| The number of resulting solids | 37 | 13 |
| Dimensions of a Single Sector (XYZ) [m] | 0.25 × 0.25 × 0.75 |
|---|---|
| Option to fill empty elements within a single grid level | YES |
| Filtration intensity | 2 |
| The level of filling the empty elements between each level of the grid | 10 |
| Hybrid mode | NO |
| Criteria | Reconstruction from Original Data (R1) | Reconstruction from Processed Data (R2) |
|---|---|---|
| Minimum distance [cm] | 0.25 | 0.65 |
| Average distance [cm] | 63.31 | 49.97 |
| Maximum distance [m] | 6.44 | 2.47 |
| Vertex position accuracy at the threshold of one meter | 80.64% | 91.48% |
| The average difference between respective normal vectors | 0.39 | 0.54 |
| Normal vectors accuracy at the threshold of 0.75 | 42.20% | 51.17% |
| The number of resulting solids | 38 | 18 |
| Dimensions of a Single Sector (XYZ) [m] | 0.5 × 0.5 × 1.0 |
|---|---|
| Option to fill empty elements within a single grid level | YES |
| Filtration intensity | 2 |
| The level of filling the empty elements between each level of the grid | 20 |
| Hybrid mode | YES |
| Criteria | Reconstruction from Original Data (R1) | Reconstruction from Processed Data (R2) |
|---|---|---|
| Minimum distance (cm) | 4.03 | 0.78 |
| Average distance (cm) | 165.85 | 3.31 |
| Maximum distance (m) | 12.68 | 11.72 |
| Vertex position accuracy at the threshold of one meter | 52.60% | 76.77% |
| The average difference between respective normal vectors | 0.27 | 0.40 |
| Normal vectors accuracy at the threshold of 0.75 | 24.37% | 32.54% |
| Number of resulting solids | 4 | 3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kulawiak, M.; Lubniewski, Z. Improving the Accuracy of Automatic Reconstruction of 3D Complex Buildings Models from Airborne Lidar Point Clouds. Remote Sens. 2020, 12, 1643. https://doi.org/10.3390/rs12101643
Kulawiak M, Lubniewski Z. Improving the Accuracy of Automatic Reconstruction of 3D Complex Buildings Models from Airborne Lidar Point Clouds. Remote Sensing. 2020; 12(10):1643. https://doi.org/10.3390/rs12101643
Chicago/Turabian StyleKulawiak, Marek, and Zbigniew Lubniewski. 2020. "Improving the Accuracy of Automatic Reconstruction of 3D Complex Buildings Models from Airborne Lidar Point Clouds" Remote Sensing 12, no. 10: 1643. https://doi.org/10.3390/rs12101643
APA StyleKulawiak, M., & Lubniewski, Z. (2020). Improving the Accuracy of Automatic Reconstruction of 3D Complex Buildings Models from Airborne Lidar Point Clouds. Remote Sensing, 12(10), 1643. https://doi.org/10.3390/rs12101643