Use of WorldView-2 Along-Track Stereo Imagery to Probe a Baltic Sea Algal Spiral

Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Dataset
2.2. Selection of Wavelength Bands to Analyze
2.3. Treatment of Noise Stripes
2.4. Method for Calculating Currents
3. Results
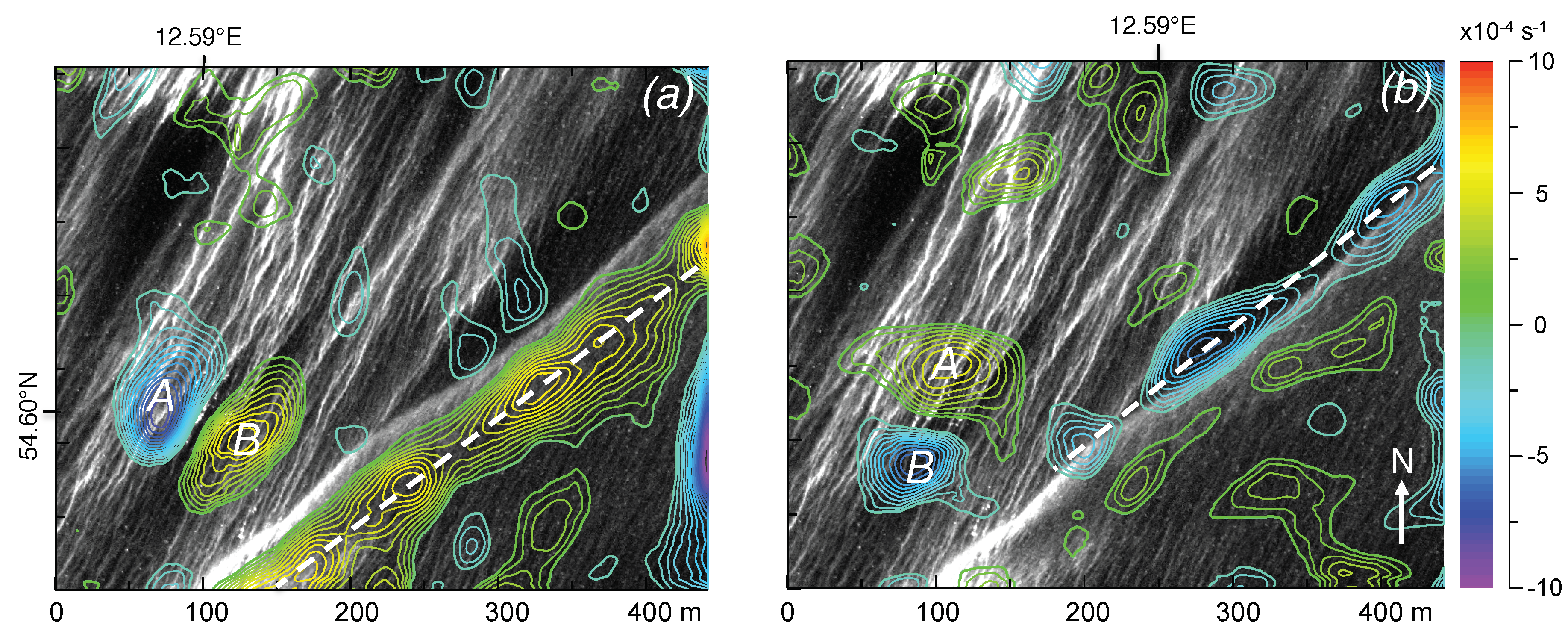
3.1. Spiral Pattern (Band 3 Data)
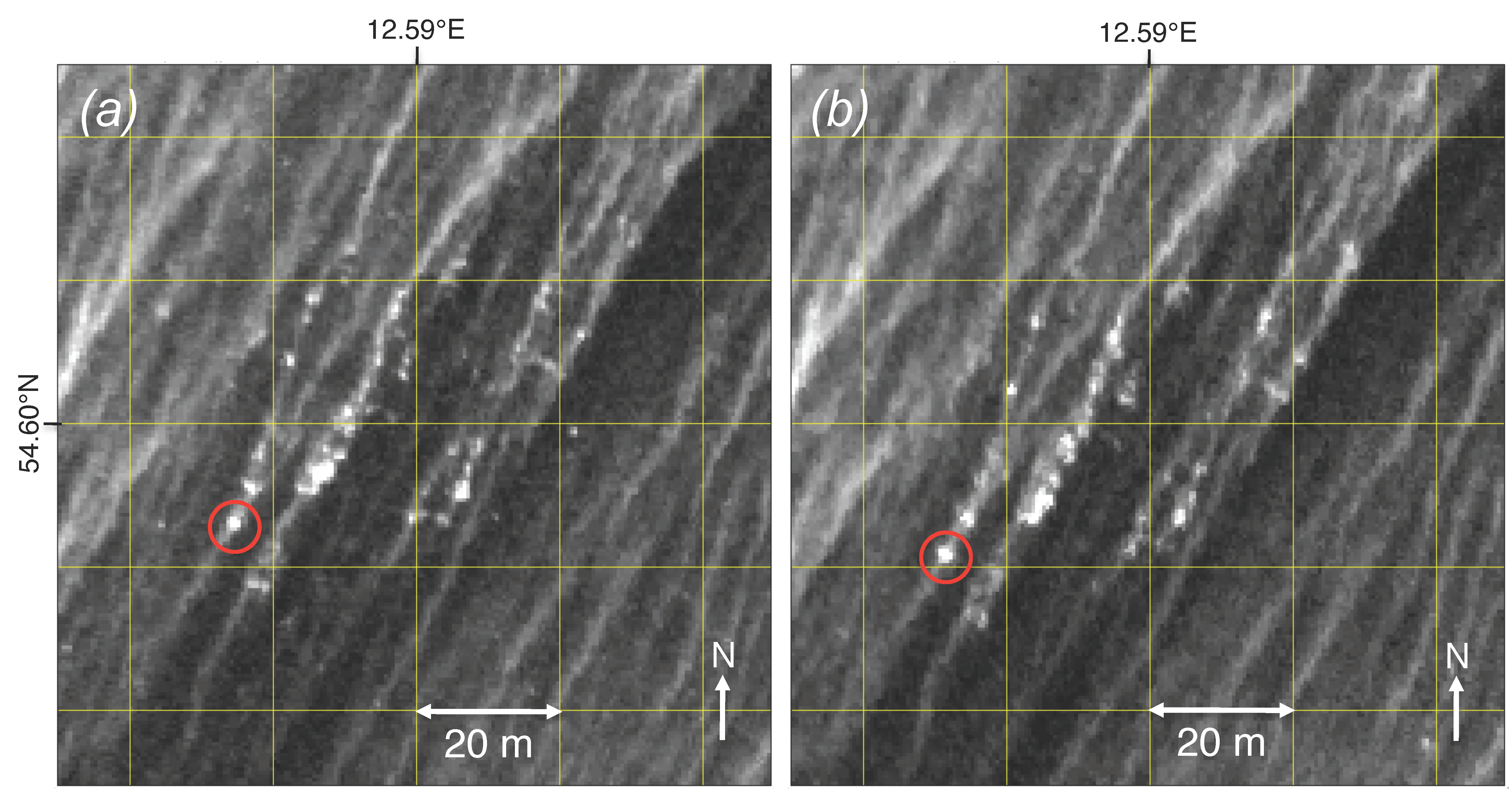
3.2. Algal Aggregations (Panchromatic Data)
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kääb, A.; Leprince, S. Motion detection using near-simultaneous satellite acquisitions. Rem. Sens. Environ. 2014, 154, 164–179. [Google Scholar] [CrossRef]
- Qazi, W.A.; Emery, W.J.; Fox-Kemper, B. Computing ocean surface currents over the coastal California current system using 30-min-lag sequential SAR images. IEEE Trans. Geosci. Rem. Sens. 2014, 52, 7559–7580. [Google Scholar] [CrossRef]
- Matthews, J.P.; Yoshikawa, Y. Synergistic surface current mapping by spaceborne stereo imaging and coastal HF radar. Geophys. Res. Letts. 2012, 39. [Google Scholar] [CrossRef]
- Gade, M.; Seppke, B.; Dreschler-Fischer, L. Mesoscale surface current fields in the Baltic Sea derived from multi-sensor satellite data. Int. J. Remote Sens. 2012, 33, 3122–3146. [Google Scholar] [CrossRef]
- Chen, W. A global optimal solution with higher order continuity for the estimation of surface velocity from infrared images. IEEE TGRS 2010, 48, 1931–1939. [Google Scholar]
- Chen, W. Nonlinear inverse model for velocity estimation from an image sequence. J. Geophys. Res. 2011, 116, C06015. [Google Scholar] [CrossRef]
- Chen, W.; Mied, R.P. River velocities from sequential multispectral remote sensing images. Water Resour. Res. 2013, 49, 3093–3103. [Google Scholar] [CrossRef]
- Delandmeter, P.; Lambrechts, J.; Marmorino, G.O.; Legat, V.; Wolanski, E.; Remacle, J.F.; Chen, W.; Deleersnijder, E. Submesoscale tidal eddies in the wake of coral islands and reefs: Satellite data and numerical modelling. Ocean Dyn. 2017, 67, 897–913. [Google Scholar] [CrossRef]
- Marmorino, G.; Chen, W.; Mied, R.P. Submesoscale Tidal-Inlet Dipoles Resolved Using Stereo WorldView Imagery. IEEE Geosci. Rem. Sens. Lett. 2017, 14, 1705–1709. [Google Scholar] [CrossRef]
- D’Asaro, E.A.; Shcherbina, A.Y.; Klymak, J.M.; Molemaker, J.; Novelli, G.; Guigand, C.M.; Haza, A.C.; Haus, B.K.; Ryan, E.H.; Jacobs, G.A.; et al. Ocean convergence and the dispersion of flotsam. Proc. Natl. Acad. Sci. USA 2018, 115, 1162–1167. [Google Scholar] [CrossRef]
- Taylor, J.R. Accumulation and subduction of buoyant material at submesoscale fronts. J. Phys. Oceanogr. 2018, 48, 1233–1241. [Google Scholar] [CrossRef]
- Huisman, J.; Codd, G.A.; Paerl, H.W.; Ibelings, B.W.; Verspagen, J.M.; Visser, P.M. Cyanobacterial blooms. Nature Rev. Microbiol. 2018, 16, 471. [Google Scholar] [CrossRef]
- Kahru, M. Using satellites to monitor large-scale environmental change: A case study of cyanobacteria blooms in the Baltic Sea. In Monitoring Algal Blooms: New Techniques for Detecting Large-Scale Environmental Change; Springer: Berlin, Germany, 1997; pp. 43–61. [Google Scholar]
- Flohr, P.; Vassilicos, J.C. Accelerated scalar dissipation in a vortex. J. Fluid Mech. 1997, 348, 295–317. [Google Scholar] [CrossRef]
- Updike, T.; Comp, C. Radiometric Use of WorldView-2 Imagery; Tech. Note; DigitalGlobe Inc.: Longmont, CO, USA, 2010. [Google Scholar]
- Corsini, G.; Diani, M.; Walzel, T. Striping removal in MOS-B data. IEEE Trans. Geosci. Rem. Sens. 2000, 38, 1439–1446. [Google Scholar] [CrossRef]
- Lyon, P.E. An automated de-striping algorithm for Ocean Colour Monitor imagery. Int. J. Rem. Sens. 2009, 30, 1493–1502. [Google Scholar] [CrossRef]
- Schneider, C.A.; Rasband, W.S.; Eliceiri, K.W. NIH Image to ImageJ: 25 years of image analysis. Nat. Methods 2012, 9, 671. [Google Scholar] [CrossRef]
- Karimova, S.; Gade, M. Improved statistics of sub-mesoscale eddies in the Baltic Sea retrieved from SAR imagery. Int. J. Rem. Sens. 2016, 37, 2394–2414. [Google Scholar] [CrossRef]
- Karimova, S. Spiral eddies in the Baltic, Black and Caspian seas as seen by satellite radar data. Adv. Space Res. 2012, 50, 1107–1124. [Google Scholar] [CrossRef]
- Eldevik, T.; Dysthe, K.B. Spiral eddies. J. Phys. Oceanogr. 2002, 32, 851–869. [Google Scholar] [CrossRef]
- Fennel, W.; Seifert, T.; Kayser, B. Rossby radii and phase speeds in the Baltic Sea. Cont. Shelf Res. 1991, 11, 23–36. [Google Scholar] [CrossRef]
- Marmorino, G.; Smith, G.; North, R.; Baschek, B. Application of airborne infrared remote sensing to the study of ocean submesoscale eddies. Front. Mech. Eng. 2018, 4. [Google Scholar] [CrossRef]
- Thorpe, S.A. Langmuir circulation. Annu. Rev. Fluid Mech. 2004, 36, 55–79. [Google Scholar] [CrossRef]
- Szekielda, K.H.; Marmorino, G.O.; Maness, S.J.; Donato, T.F.; Bowles, J.H.; Miller, W.D.; Rhea, W.J. Airborne hyperspectral imaging of cyanobacteria accumulations in the Potomac River. J. Appl. Rem. Sens. 2007, 1, 013544. [Google Scholar]
- McKinna, L.I. Three decades of ocean-color remote-sensing Trichodesmium spp. in the World’s oceans: A review. Progr. Oceanogr. 2015, 131, 177–199. [Google Scholar] [CrossRef]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marmorino, G.; Chen, W. Use of WorldView-2 Along-Track Stereo Imagery to Probe a Baltic Sea Algal Spiral. Remote Sens. 2019, 11, 865. https://doi.org/10.3390/rs11070865
Marmorino G, Chen W. Use of WorldView-2 Along-Track Stereo Imagery to Probe a Baltic Sea Algal Spiral. Remote Sensing. 2019; 11(7):865. https://doi.org/10.3390/rs11070865
Chicago/Turabian StyleMarmorino, George, and Wei Chen. 2019. "Use of WorldView-2 Along-Track Stereo Imagery to Probe a Baltic Sea Algal Spiral" Remote Sensing 11, no. 7: 865. https://doi.org/10.3390/rs11070865
APA StyleMarmorino, G., & Chen, W. (2019). Use of WorldView-2 Along-Track Stereo Imagery to Probe a Baltic Sea Algal Spiral. Remote Sensing, 11(7), 865. https://doi.org/10.3390/rs11070865