High-Resolution Urban Land Mapping in China from Sentinel 1A/2 Imagery Based on Google Earth Engine




Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Study Area
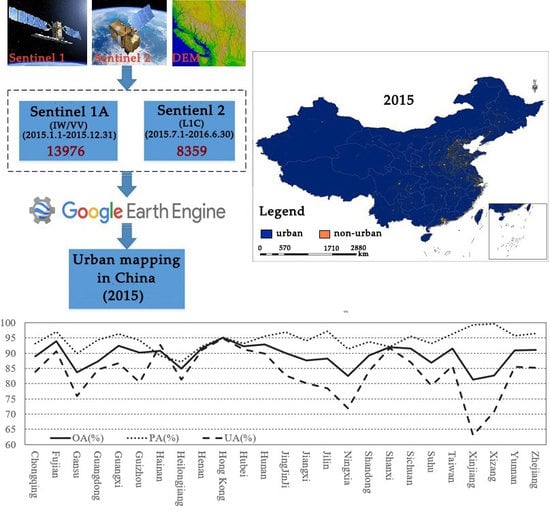
2.2. Data and Preprocessing
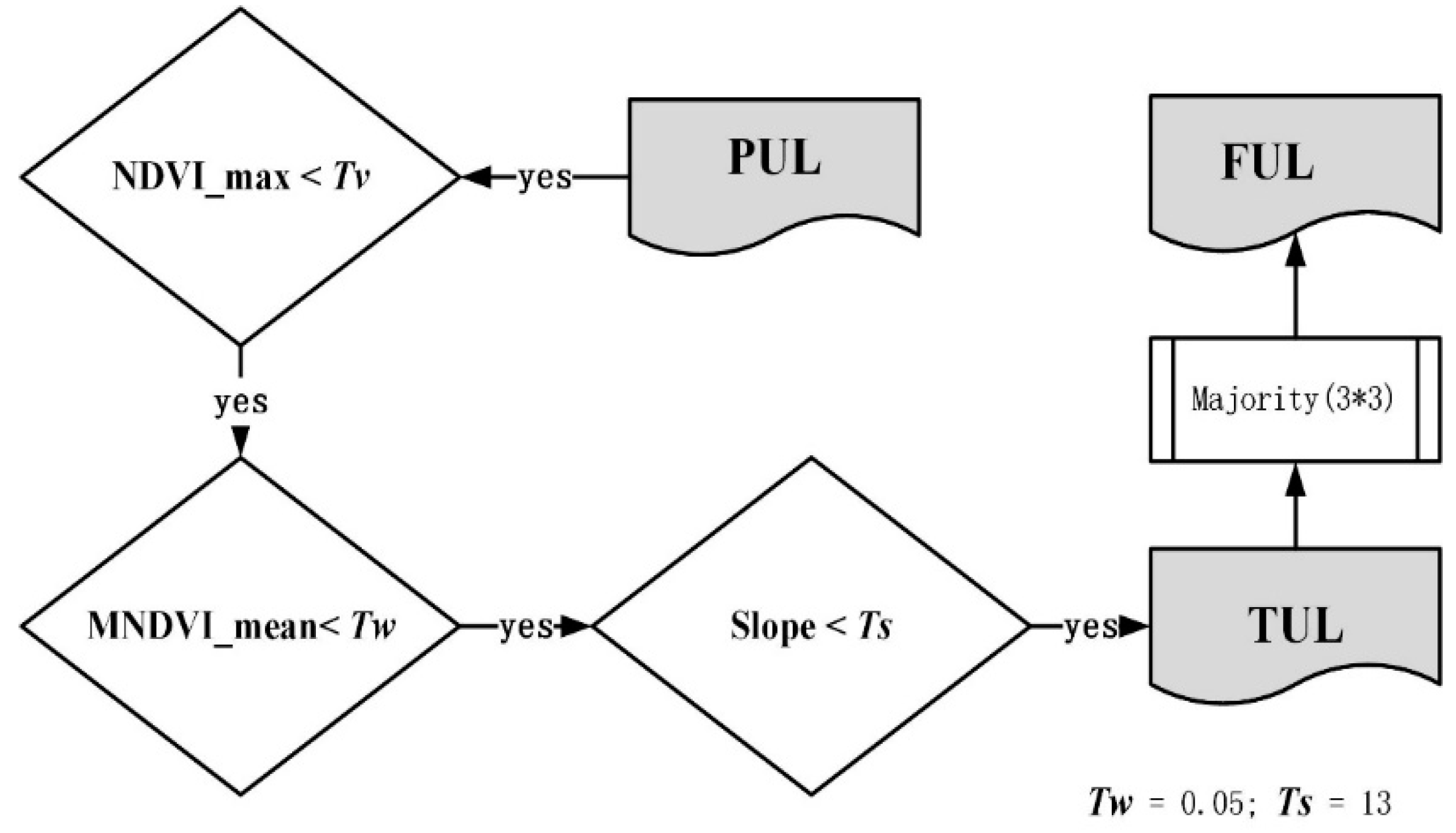
2.3. Deriving PUL, NDVI_Max, MNDWI_Mean and Slope Data
2.4. Determining the Segmentation Thresholds
2.5. Extraction of the Urban Land Map on the GEE Platform
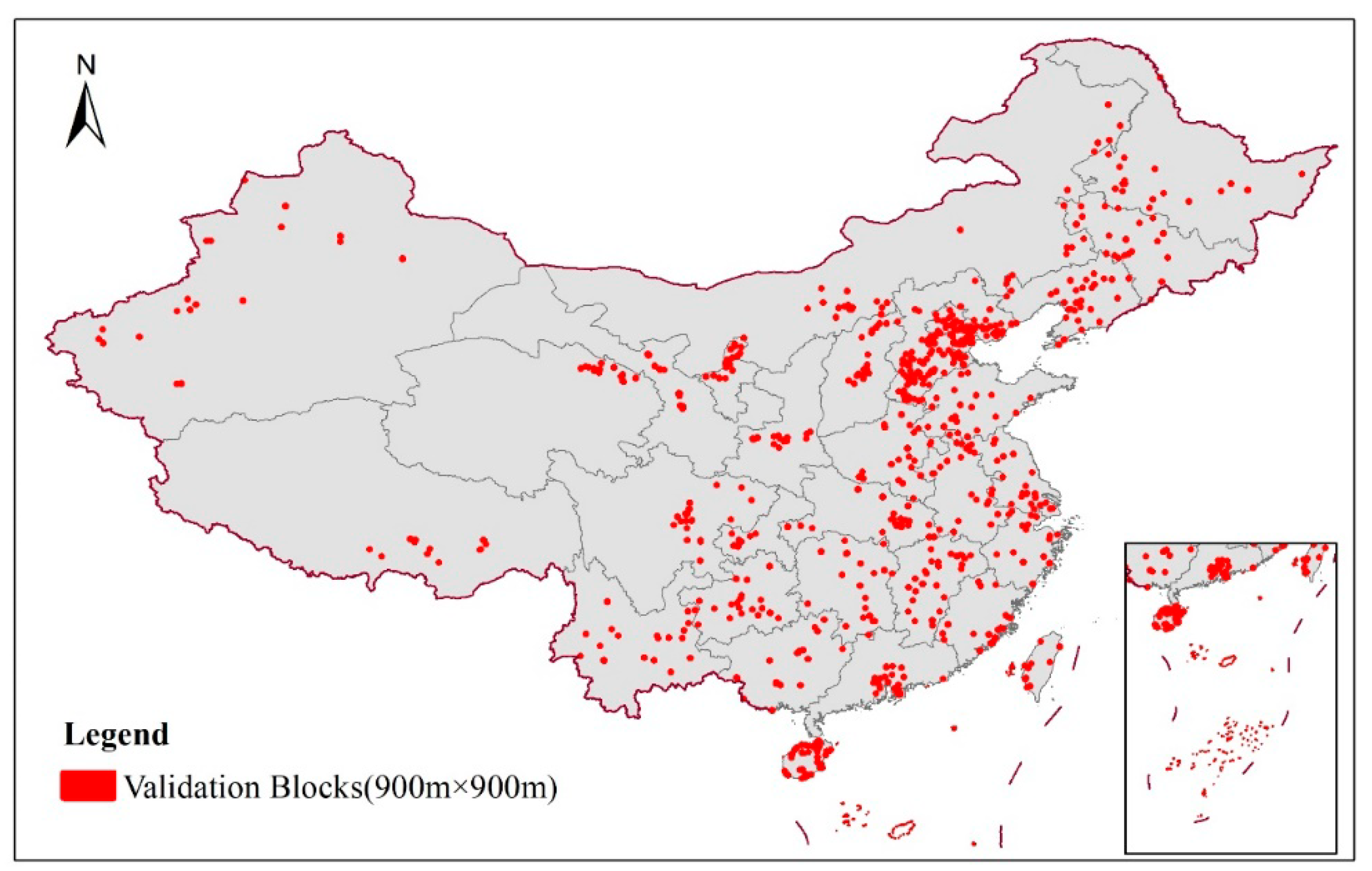
2.6. Accuracy Assessment
- Urban: urban region in the Northern Plains with vegetation as background, urban region in the northwest arid area with bare soil as background, and urban land covered by other non-urban cover types (e.g., trees).
- Non-urban: typical vegetation types in different parts of China including sparse shrubs, dense grassland, forests etc. Vegetation types have various characteristics such as bare soil as background (shrubs) or very homogeneous and dense canopies (grass, forests), and some greenhouses (crops covered by artificial plastic film). In addition to various kinds of vegetation types, typical water body samples with ships are also displayed here. Other special land covers such as mine pits, river beaches and bare rock are not shown here.
3. Results
3.1. Thresholds for Mapping
3.2. Urban Land Classification
3.3. Accuracy and Comparison
- For the cities of Beijing, Shanghai, and Guangzhou, shown in rows 1–3 in Figure 15, it can be noticed that the urban classification in GlobeLand30 had an obvious overestimation problem because this product was derived from low Landsat imagery resolution, with the loss of many spatial details in the land surrounding the Pearl River region in Guangzhou. GHSL had a similar overestimation problem. Our mapping result and Liu’s product appeared more consistent with the urban extent that can be observed in the referenced Sentinel 2 image of Shanghai and Guangzhou. In Beijing, however, Liu’s product tended to over classify the non-urban types as urban land, making it appear a very continuous urban region, and the same situation could also be found in GlobeLand30. Conversely, our results delineated a complete urban land boundary without loss of spatial details that was consistent with the visual interpretation of the referenced Sentinel 2 image.
- The urban region with human settlements concentrated on the plain shown in the fourth row had the following characteristics: the human settlements were small, compact, and connected by narrow roads. GlobeLand30 gave a relatively complete representation of the urban boundary but missed the narrow roads while Liu’s result fails to extract the small, scattered villages. Our mapping result and GHSL provided a good delineation of both the human settlements and the narrow roads.
- The linearly distributed human settlements shown in the fifth row were small and dispersed in space, which makes it difficult to be captured by medium resolution images. GlobeLand30 maps only the core urban areas while the small settlements were lost. Liu’s product totally failed to extract the urban areas in this region of interest. GHSL failed to map most of the urban centers and roads.
- For cities growing on a Gobi background (a desert area where the ground is mostly covered by coarse sand and gravels) as shown in the sixth row, the GlobeLand30 product provided a relatively clear boundary of the urban region but lost many of the spatial details. Liu’s product demonstrated more semantic details of urban land at the cost of missing some small urban areas. Our mapping results gave a much more accurate urban land map by providing a clear boundary of the urban region together with sufficient spatial details. GHSL provided a clear road network without loss of the main human settlements.
- In a high-altitude region such as the one shown in the seventh row, the landscape pattern was characterized by tightly distributed small houses mixed with other land covers such as water, vegetation etc. Our results provided an accurate delineation of urban land with clear and complete boundaries and structure information. GlobeLand30 only captured the core urban region and Liu’s product provided relatively accurate results with some spatial details lost. GHSL failed to provide an accurate delineation of urban land in this region.
3.4. Regression between Contemporary Extracted Products and Ground Truth Data
4. Discussion
4.1. The Effectiveness of the Combined Use of Optical and SAR Data
4.2. Over/Underestimation of Urban Land
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Seto, K.C.; Fragkias, M.; Güneralp, B.; Reilly, M.K. A Meta-Analysis of Global Urban Land Expansion. PLoS ONE 2011, 6, e23777. [Google Scholar] [CrossRef]
- Schneider, A.; Friedl, M.A.; Potere, D. Mapping global urban areas using MODIS 500-m data: New methods and datasets based on ‘urban ecoregions’. Remote Sens. Environ. 2010, 114, 8, 1733–1746. [Google Scholar] [CrossRef]
- Arnold, C.L.; Gibbons, C.J. Impervious Surface Coverage: The Emergence of a Key Environmental Indicator. J. Am. Plan. Assoc. 1996, 62, 243–258. [Google Scholar] [CrossRef]
- Weng, Q.H.; Hu, X.F. Medium spatial resolution satellite imagery for estimating and mapping urban impervious surfaces using LSMA and ANN. IEEE Trans. Geosci. Remote Sens. 2008, 46, 8, 2397–2406. [Google Scholar]
- Sun, Z.C.; Guo, H.D.; Li, X.W.; Lu, L.L.; Du, X.P. Estimating urban impervious surfaces from Landsat-5 TM imagery using multilayer perceptron neural network and support vector machine. J. Appl. Remote Sens. 2011, 5, 053501. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, H.; Lin, H. Improving the impervious surface estimation with combined use of optical and SAR remote sensing images. Remote Sens. Environ. 2014, 141, 155–167. [Google Scholar] [CrossRef]
- Li, X.; Gong, P.; Liang, L. A 30-year (1984–2013) record of annual urban dynamics of Beijing City derived from Landsat data. Remote Sens. Environ. 2015, 166, 78–90. [Google Scholar] [CrossRef]
- Zhang, C.; Sargent, I.; Pan, X.; Li, H.; Gardiner, A.; Hare, J.; Atkinson, P.M. An object-based convolutional neural network (OCNN) for urban land use classification. Remote Sens. Environ. 2018, 216, 57–70. [Google Scholar] [CrossRef]
- Wu, M.; Zhao, X.; Sun, Z.; Guo, H. A Hierarchical Multiscale Super-Pixel-Based Classification Method for Extracting Urban Impervious Surface Using Deep Residual Network From WorldView-2 and LiDAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 210–222. [Google Scholar] [CrossRef]
- Sun, Z.; Zhao, X.; Wu, M.; Wang, C. Extracting Urban Impervious Surface from WorldView-2 and Airborne LiDAR Data Using 3D Convolutional Neural Networks. J. Soc. Remote Sens. 2018, 47, 401–412. [Google Scholar] [CrossRef]
- Xu, H.Q. Analysis of Impervious Surface and its Impact on Urban Heat Environment using the Normalized Difference Impervious Surface Index (NDISI). Photogramm. Eng. Remote Sens. 2010, 76, 557–565. [Google Scholar] [CrossRef]
- Liu, C.; Shao, Z.; Chen, M.; Luo, H. MNDISI: A multi-source composition index for impervious surface area estimation at the individual city scale. Remote Sens. Lett. 2013, 4, 803–812. [Google Scholar] [CrossRef]
- Wang, Z.; Gang, C.; Li, X.; Chen, Y.; Li, J. Application of a normalized difference impervious index (NDII) to extract urban impervious surface features based on Landsat TM images. Int. J. Remote Sens. 2015, 36, 1–15. [Google Scholar] [CrossRef]
- Deng, C.B.; Wu, C.S. BCI: A biophysical composition index for remote sensing of urban environments. Remote Sens. Environ. 2012, 127, 247–259. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, C.; Guo, H.; Shang, R. A Modified Normalized Difference Impervious Surface Index (MNDISI) for Automatic Urban Mapping from Landsat Imagery. Remote Sens. 2017, 9, 942. [Google Scholar] [CrossRef]
- Wu, C.; Murray, A.T. Estimating impervious surface distribution by spectral mixture analysis. Remote Sens. Environ. 2003, 84, 493–505. [Google Scholar] [CrossRef]
- Civco, D.; Hurd, J.D.; Wilson, E.H.; Arnold, C.L.; Prisloe, M.P. Quantifying and describing urbanizing landscapes in the northeast United States. Photogramm. Eng. Remote Sens. 2002, 68, 1083–1090. [Google Scholar]
- Li, G.; Lu, D.; Moran, E.; Hetrick, S. Mapping impervious surface area in the Brazilian Amazon using Landsat Imagery. GISci. Remote Sens. 2013, 50, 172–183. [Google Scholar] [CrossRef] [PubMed]
- Lu, D.S.; Weng, Q.H. Spectral mixture analysis of the urban landscape in Indianapolis with Landsat ETM plus imagery. Photogramm. Eng. Remote Sens. 2004, 70, 1053–1062. [Google Scholar] [CrossRef]
- Yang, L.M.; Huang, C.Q.; Homer, C.G.; Wylie, B.K.; Coan, M.J. An approach for mapping large-area impervious surfaces: Synergistic use of Landsat-7 ETM+ and high spatial resolution imagery. Can. J. Remote Sens. 2003, 29, 230–240. [Google Scholar] [CrossRef]
- Quattrochi, D.A.; Wentz, E.; Lam, N.S.-N.; Emerson, C.W. Integrating Scale in Remote Sensing and GIS, 3rd ed.; CRC Press: Boca Raton, Britain, 2017; p. 440. [Google Scholar] [CrossRef]
- Shao, Y.; Li, G.L.; Guenther, E.; Campbell, J.B. Evaluation of Topographic Correction on Subpixel Impervious Cover Mapping With CBERS-2B Data. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1–5. [Google Scholar]
- Lu, D.S.; Li, G.Y.; Kuang, W.H.; Moran, E. Methods to extract impervious surface areas from satellite images. Int. J. Digit. Earth 2014, 7, 93–112. [Google Scholar] [CrossRef]
- Esch, T.; Marconcini, M.; Felbier, A.; Roth, A.; Heldens, W.; Huber, M.; Schwinger, M.; Taubenböck, H.; Müller, A.; Dech, S. Urban footprint processor—fully automated processing chain generating settlement masks from global data of the TanDEM-X mission. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1617–1621. [Google Scholar] [CrossRef]
- Ban, Y.; Jacob, A.; Gamba, P. Spaceborne SAR data for global urban mapping at 30m resolution using a robust urban extractor. ISPRS J. Photogramm. Remote Sens. 2015, 103, 28–37. [Google Scholar] [CrossRef]
- Hansen, M.C.; Loveland, T.R. A review of large area monitoring of land cover change using Landsat data. Remote Sens. Environ. 2012, 122, 66–74. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30m resolution: A POK-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef]
- Zhang, Q.; Seto, K.C. Mapping urbanization dynamics at regional and global scales using multi-temporal DMSP/OLS nighttime light data. Remote Sens. Environ. 2011, 115, 2320–2329. [Google Scholar] [CrossRef]
- Xian, G.; Homer, C. Updating the 2001 National Land Cover Database Impervious Surface Products to 2006 using Landsat Imagery Change Detection Methods. Remote Sens. Environ. 2010, 114, 1676–1686. [Google Scholar] [CrossRef]
- Pesaresi, M.; Huadong, G.; Blaes, X.; Ehrlich, D.; Ferri, S.; Gueguen, L.; Halkia, M.; Kauffmann, M.; Kemper, T.; Lu, L.; et al. A Global Human Settlement Layer From Optical HR/VHR RS Data: Concept and First Results. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2102–2131. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Allen, R.; Anderson, M.; Belward, A.; Bindschadler, R.; Cohen, W.; Gao, F.; Goward, S.N.; Helder, D.; Helmer, E.; et al. Free access to Landsat imagery. Science 2008, 320, 1011–1012. [Google Scholar] [CrossRef] [PubMed]
- Hagolle, O.; Huc, M.; Pascual, D.V.; Dedieu, G. A multi-temporal method for cloud detection, applied to FORMOSAT-2, VENµS, LANDSAT and SENTINEL-2 images. Remote Sens. Environ. 2010, 114, 1747–1755. [Google Scholar] [CrossRef]
- Joshi, N.; Baumann, M.; Ehammer, A.; Fensholt, R.; Grogan, K.; Hostert, P.; Jepsen, M.R.; Kuemmerle, T.; Meyfroidt, P.; Mitchard, E.T.A.; et al. A Review of the Application of Optical and Radar Remote Sensing Data Fusion to Land Use Mapping and Monitoring. Remote Sens. 2016, 8, 70. [Google Scholar] [CrossRef]
- Kobayashi, T.; Umehara, T.; Satake, M.; Nadai, A.; Uratsuka, S.; Manabe, T.; Masuko, H.; Shimada, M.; Shinohara, H.; Tozuka, H.; et al. Airborne dual-frequency polarimetric and interferometric SAR. IEICE Trans. Commun. 2000, 9, 1945–1954. [Google Scholar]
- Calabresi, G. The use of ERS data for flood monitoring: An overall assessment. In Proceedings of the Second ERS application workshop, London, UK, 6–8 December 1995. [Google Scholar]
- Guo, H.D.; Yang, H.N.; Sun, Z.C.; Li, X.W.; Wang, C.Z. Synergistic Use of Optical and PolSAR Imagery for Urban Impervious Surface Estimation. Photogramm. Eng. Remote Sens. 2014, 1, 91–102. [Google Scholar] [CrossRef]
- Benz, U.; Pottier, E. Object based analysis of polarimetric SAR data in alpha-entropy-anisotropy decomposition using fuzzy classification by eCognition. In Proceedings of the 2001 IEEE International Geoscience and Remote Sensing Symposium, Sydney, Ausralia, 9–13 July 2001. [Google Scholar]
- Taubenböck, H.; Esch, T.; Felbier, A.; Wiesner, M.; Roth, A.; Dech, S. Monitoring urbanization in mega cities from space. Remote Sens. Environ. 2012, 117, 162–176. [Google Scholar] [CrossRef]
- Esch, T.; Thiel, M.; Schenk, A.; Roth, A.; Muller, A.; Dech, S. Delineation of Urban Footprints From TerraSAR-X Data by Analyzing Speckle Characteristics and Intensity Information. IEEE Trans. Geosci. Remote Sens. 2010, 48, 905–916. [Google Scholar] [CrossRef]
- Esch, T.; Schenk, A.; Ullmann, T.; Thiel, M.; Roth, A.; Dech, S. Characterization of Land Cover Types in TerraSAR-X Images by Combined Analysis of Speckle Statistics and Intensity Information. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1911–1925. [Google Scholar] [CrossRef]
- Gamba, P.; Aldrighi, M.; Stasolla, M. Robust Extraction of Urban Area Extents in HR and VHR SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 27–34. [Google Scholar] [CrossRef]
- Gamba, P.; Lisini, G. Fast and Efficient Urban Extent Extraction Using ASAR Wide Swath Mode Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2184–2195. [Google Scholar] [CrossRef]
- Chaabouni-Chouayakh, H.; Datcu, M. Coarse-to-Fine Approach for Urban Area Interpretation Using TerraSAR-X Data. IEEE Geosci. Remote Sens. Lett. 2010, 7, 78–82. [Google Scholar] [CrossRef]
- Chaabouni-Chouayakh, H.; Datcu, M. Backscattering and Statistical Information Fusion for Urban Area Mapping Using TerraSAR-X Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 718–730. [Google Scholar] [CrossRef]
- Esch, T.; Heldens, W.; Hirner, A.; Keil, M.; Marconcini, M.; Roth, A.; Zeidler, J.; Dech, S.; Strano, E. Breaking new ground in mapping human settlements from space – The Global Urban Footprint. ISPRS J. Photogramm. Remote Sens. 2017, 134, 30–42. [Google Scholar] [CrossRef]
- Shelestov, A.; Lavreniuk, M.; Kussul, N.; Novikov, A.; Skakun, S. Exploring Google Earth Engine Platform for Big Data Processing: Classification of Multi-Temporal Satellite Imagery for Crop Mapping. Front. Earth Sci. 2017, 5, 4225. [Google Scholar] [CrossRef]
- Goldblatt, R.; You, W.; Hanson, G.; Khandelwal, A.K. Detecting the Boundaries of Urban Areas in India: A Dataset for Pixel-Based Image Classification in Google Earth Engine. Remote Sens. 2016, 8, 634. [Google Scholar] [CrossRef]
- Patel, N.N.; Angiuli, E.; Gamba, P.; Gaughan, A.; Lisini, G.; Stevens, F.R.; Tatem, A.J.; Trianni, G. Multitemporal settlement and population mapping from Landsat using Google Earth Engine. Int. J. Appl. Earth Obs. Geoinf. 2015, 35, 199–208. [Google Scholar] [CrossRef]
- Liu, X.; Hu, G.; Chen, Y.; Li, X.; Xu, X.; Li, S.; Pei, F.; Wang, S. High-resolution multi-temporal mapping of global urban land using Landsat images based on the Google Earth Engine Platform. Remote Sens. Environ. 2018, 209, 227–239. [Google Scholar] [CrossRef]
- Potin, P.; Rosich, B.; Miranda, N.; Grimont, P.; Bargellini, P.; Monjoux, E.; Martin, J.; Desnos, Y.-L.; Roeder, J.; Shurmer, I.; et al. Sentinel-1 mission status. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015. [Google Scholar]
- Huang, H.; Chen, Y.; Clinton, N.; Wang, J.; Wang, X.; Liu, C.; Gong, P.; Yang, J.; Bai, Y.; Zheng, Y.; et al. Mapping major land cover dynamics in Beijing using all Landsat images in Google Earth Engine. Remote Sens. Environ. 2017, 202, 166–176. [Google Scholar] [CrossRef]
- Kapur, J.; Sahoo, P.; Wong, A. A new method for gray-level picture thresholding using the entropy of the histogram. Comput. Vis. Graph. Process. 1985, 29, 273–285. [Google Scholar] [CrossRef]
- Pontius, R.G.; Millones, M. Death to Kappa: Birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
- Colesanti, C.; Wasowski, J. Investigating landslides with space-borne Synthetic Aperture Radar (SAR) interferometry. Eng. Geol. 2006, 88, 173–199. [Google Scholar] [CrossRef]
- Xu, R.; Zhang, H.; Lin, H. Urban Impervious Surfaces Estimation From Optical and SAR Imagery: A Comprehensive Comparison. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4010–4021. [Google Scholar] [CrossRef]
- Omuto, C.; Nachtergaele, F.; Rojas, R.V. State of the Art Report on Global and Regional Soil Information: Where Are We? Where to Go? Food and Agriculture Organization of the United Nations: Rome, Italy; Available online: http://www.fao.org/docrep/017/i3161e/i3161e.pdf (accessed on 31 January 2012).
















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Xu, R.; Du, W.; Wang, L.; Lu, D. High-Resolution Urban Land Mapping in China from Sentinel 1A/2 Imagery Based on Google Earth Engine. Remote Sens. 2019, 11, 752. https://doi.org/10.3390/rs11070752
Sun Z, Xu R, Du W, Wang L, Lu D. High-Resolution Urban Land Mapping in China from Sentinel 1A/2 Imagery Based on Google Earth Engine. Remote Sensing. 2019; 11(7):752. https://doi.org/10.3390/rs11070752
Chicago/Turabian StyleSun, Zhongchang, Ru Xu, Wenjie Du, Lei Wang, and Dengsheng Lu. 2019. "High-Resolution Urban Land Mapping in China from Sentinel 1A/2 Imagery Based on Google Earth Engine" Remote Sensing 11, no. 7: 752. https://doi.org/10.3390/rs11070752
APA StyleSun, Z., Xu, R., Du, W., Wang, L., & Lu, D. (2019). High-Resolution Urban Land Mapping in China from Sentinel 1A/2 Imagery Based on Google Earth Engine. Remote Sensing, 11(7), 752. https://doi.org/10.3390/rs11070752