Measuring Canopy Structure and Condition Using Multi-Spectral UAS Imagery in a Horticultural Environment



Abstract
:
1. Introduction
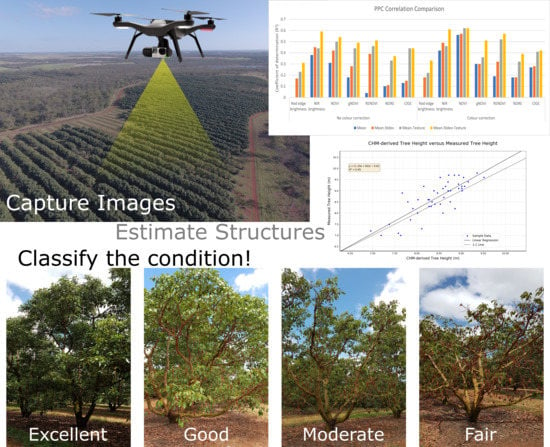
- use multi-spectral UAS imagery to map and assess the accuracy of tree height, canopy width and length, and PPC estimates for avocado trees, and
- use the highly correlated image-derived structural attribute maps to produce a tree condition ranking matched to on-round observer techniques.
2. Materials and Methods
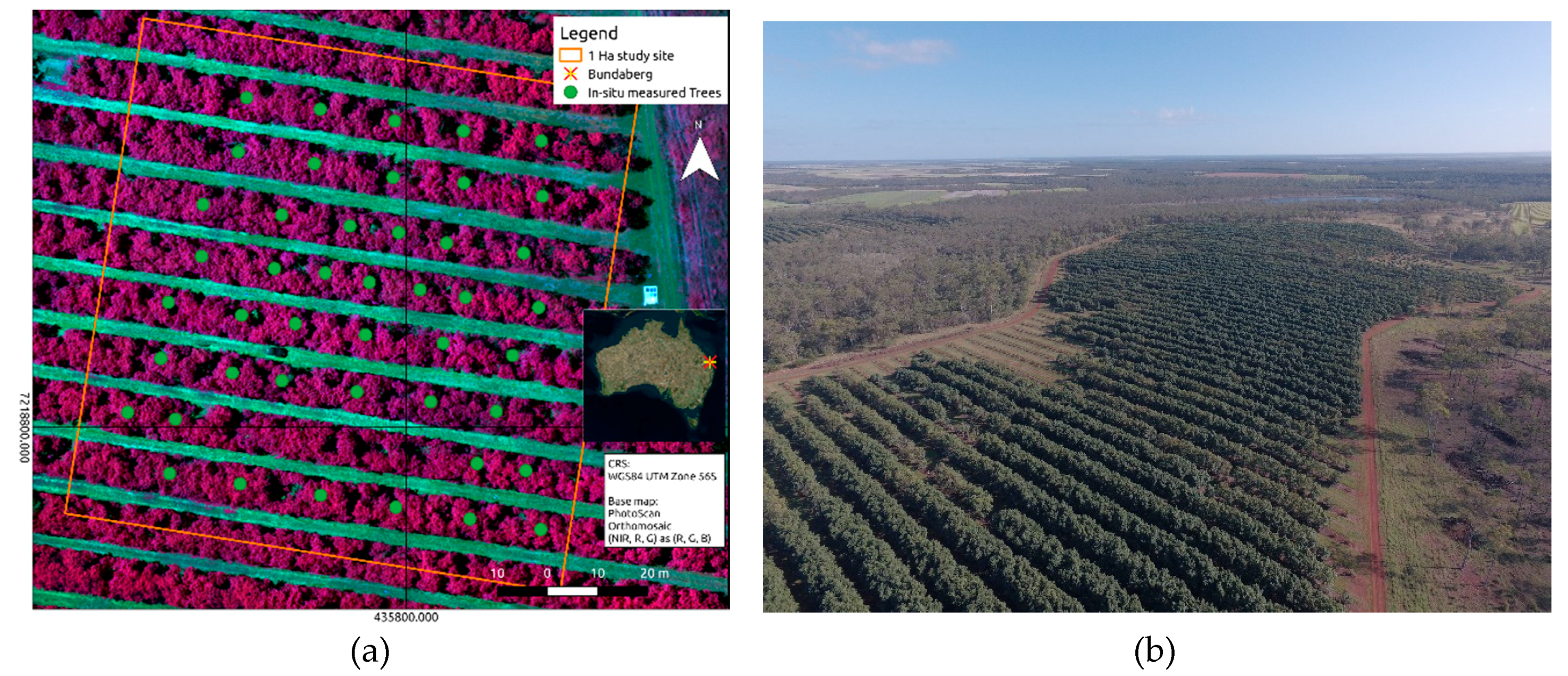
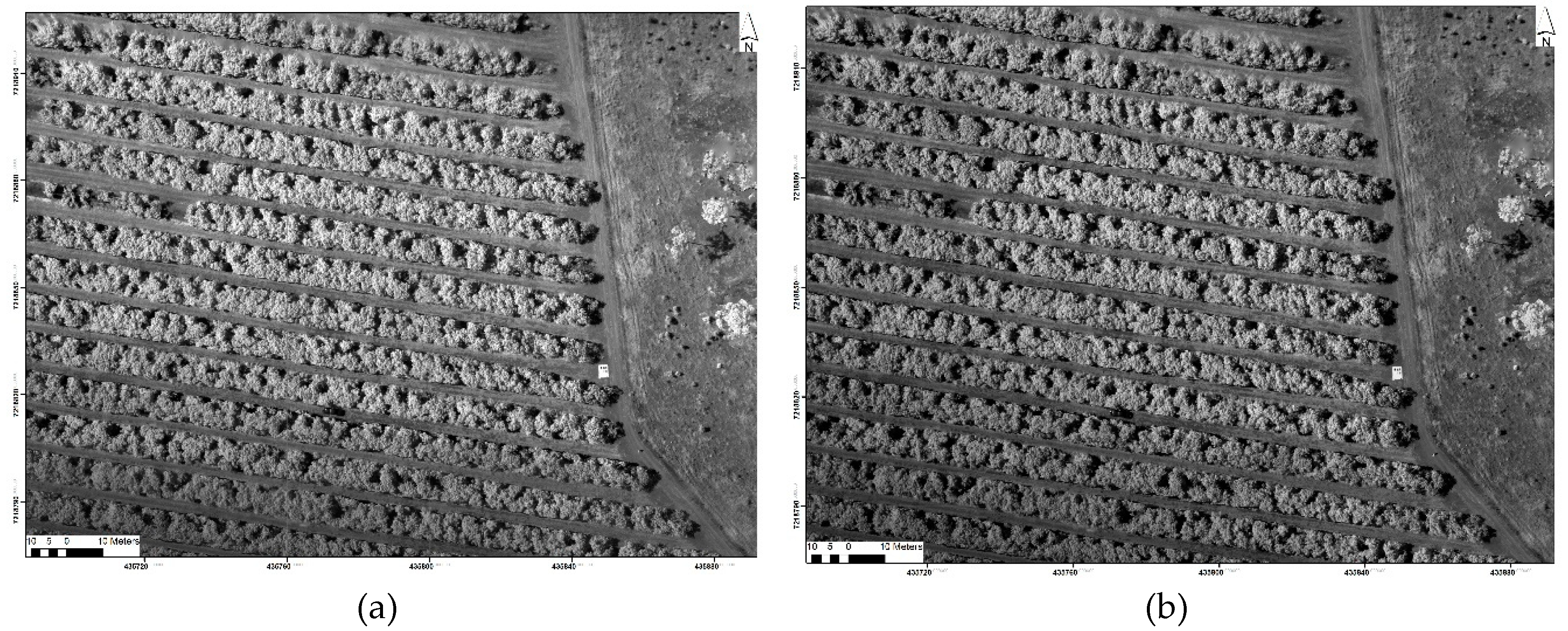
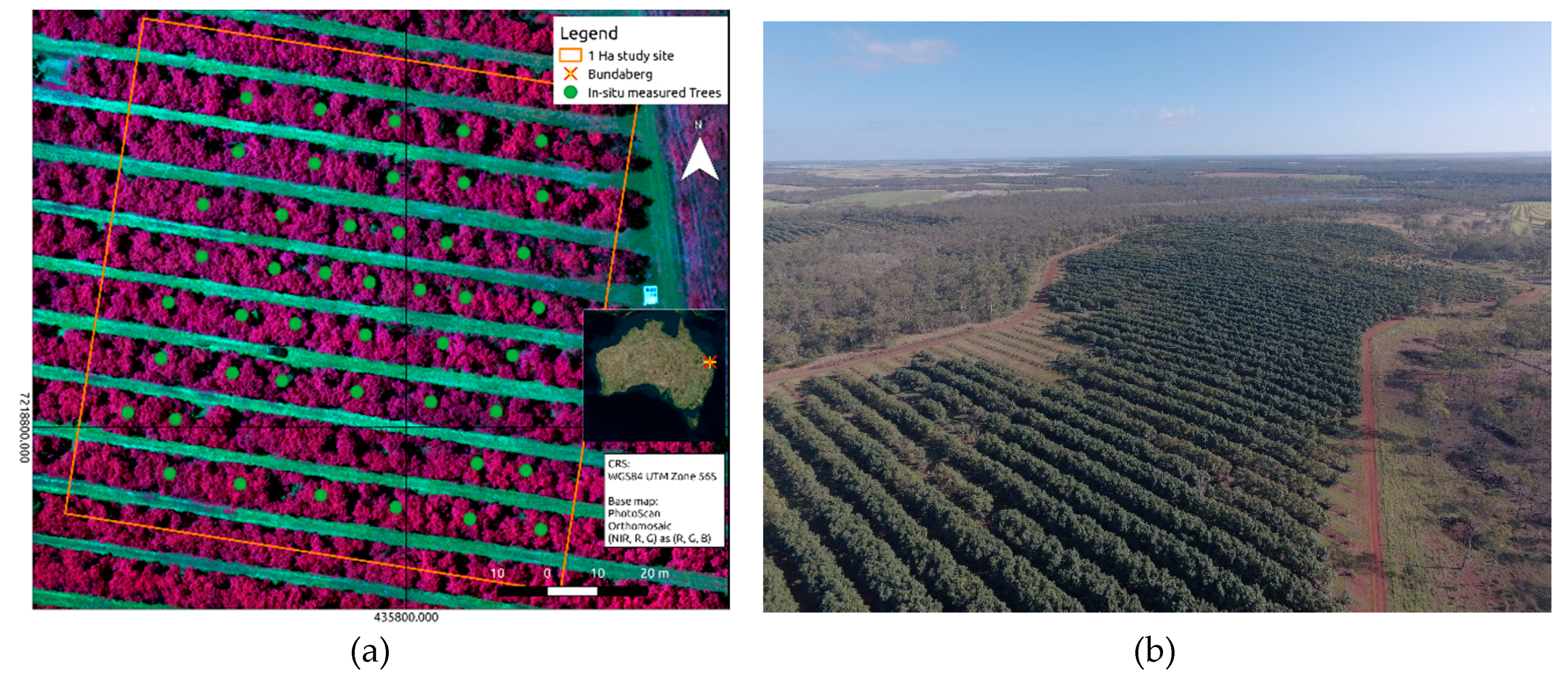
2.1. Study Sites
2.2. Field Data
2.3. UAS Data Acquisition
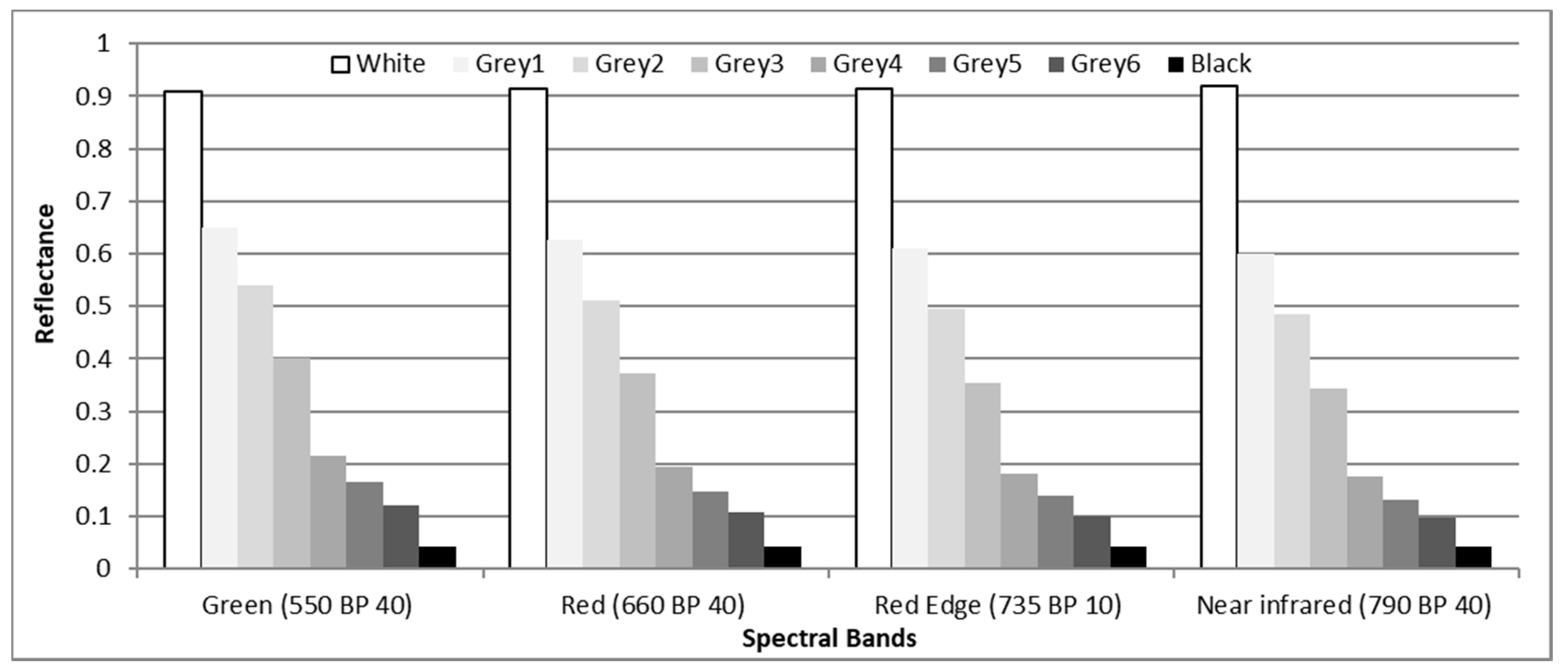
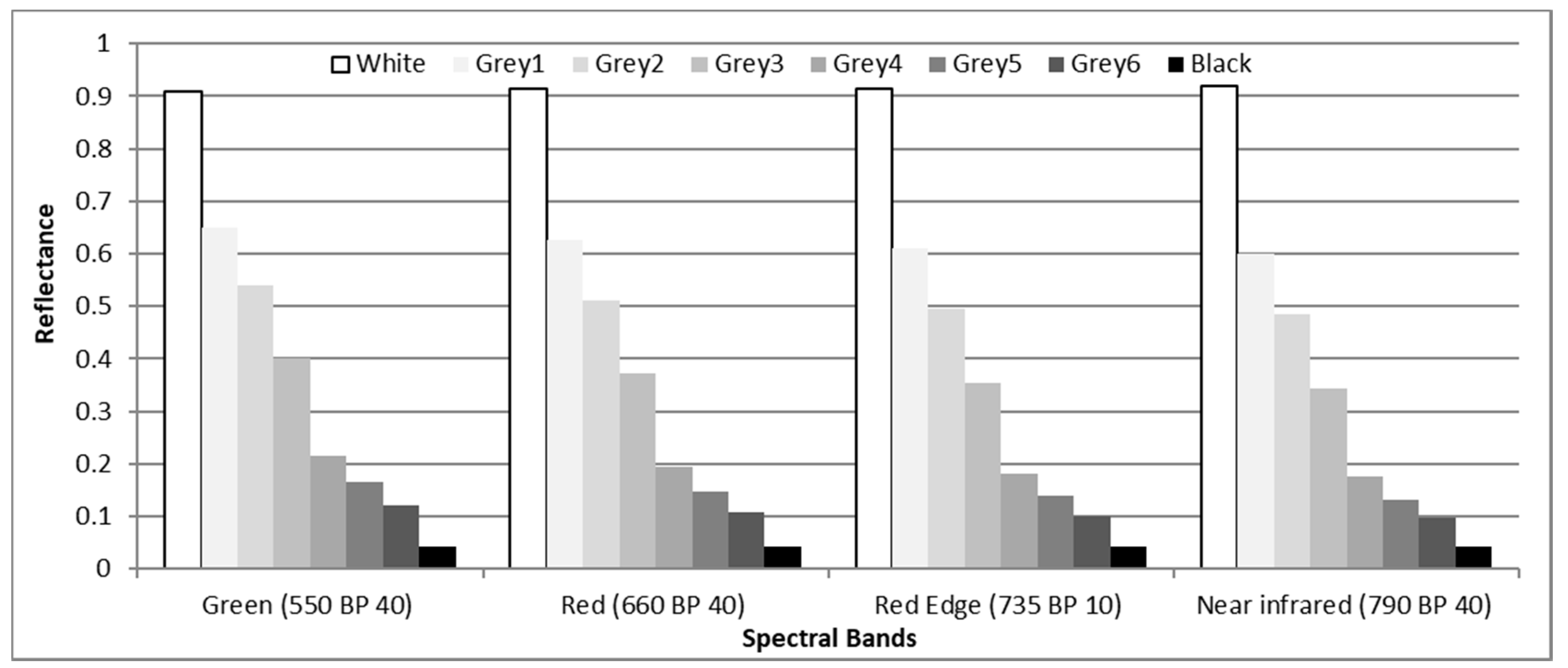
2.4. Image Pre-Processing
2.5. Producing Analysis Ready Data
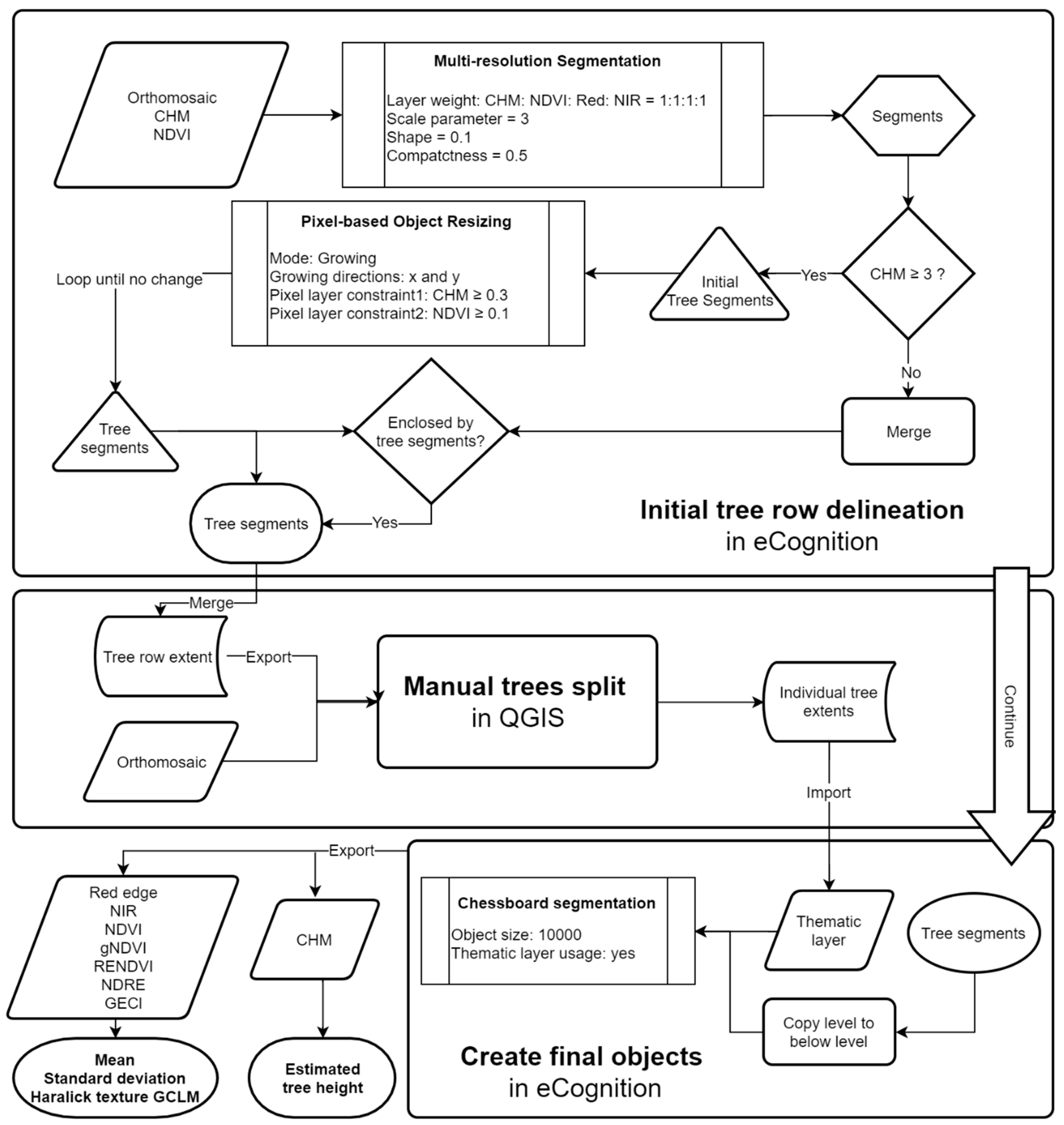
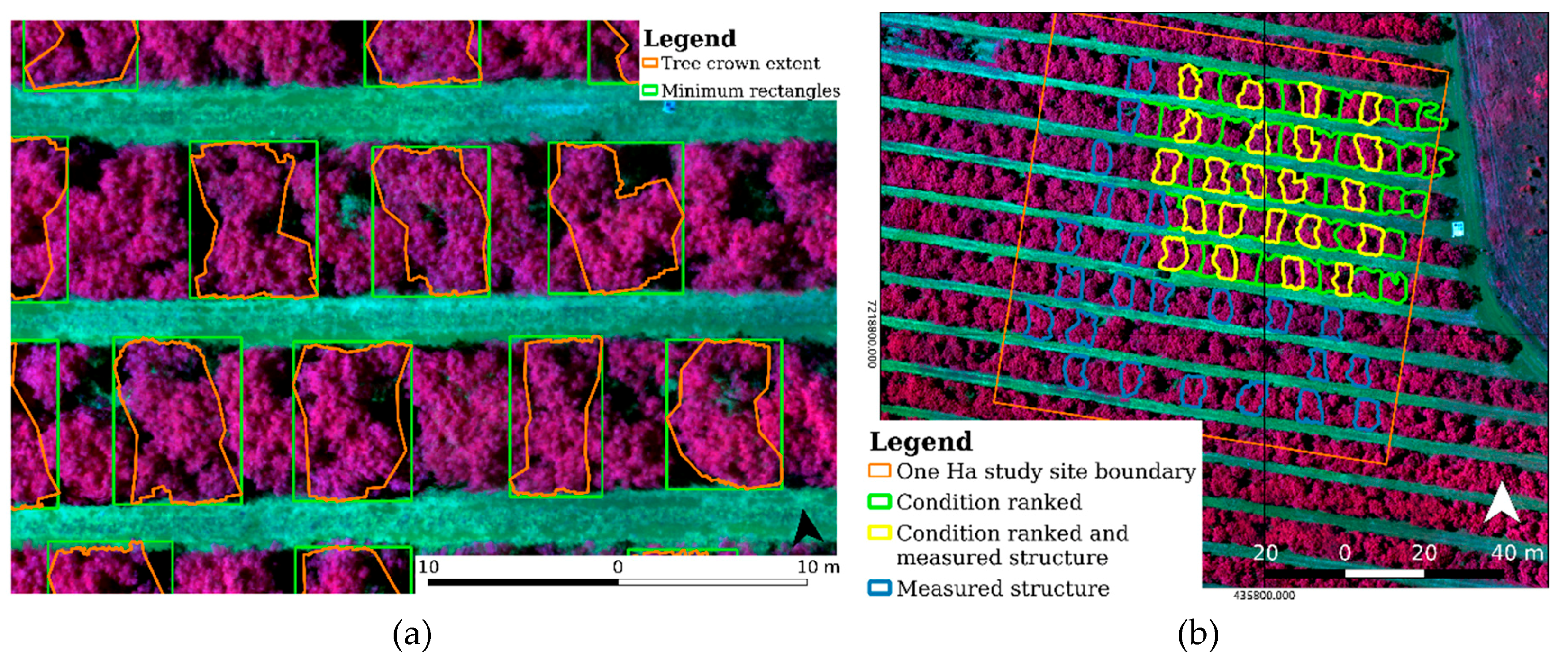
2.6. Individual Tree Crown Delineation and Structural Attribute Estimation
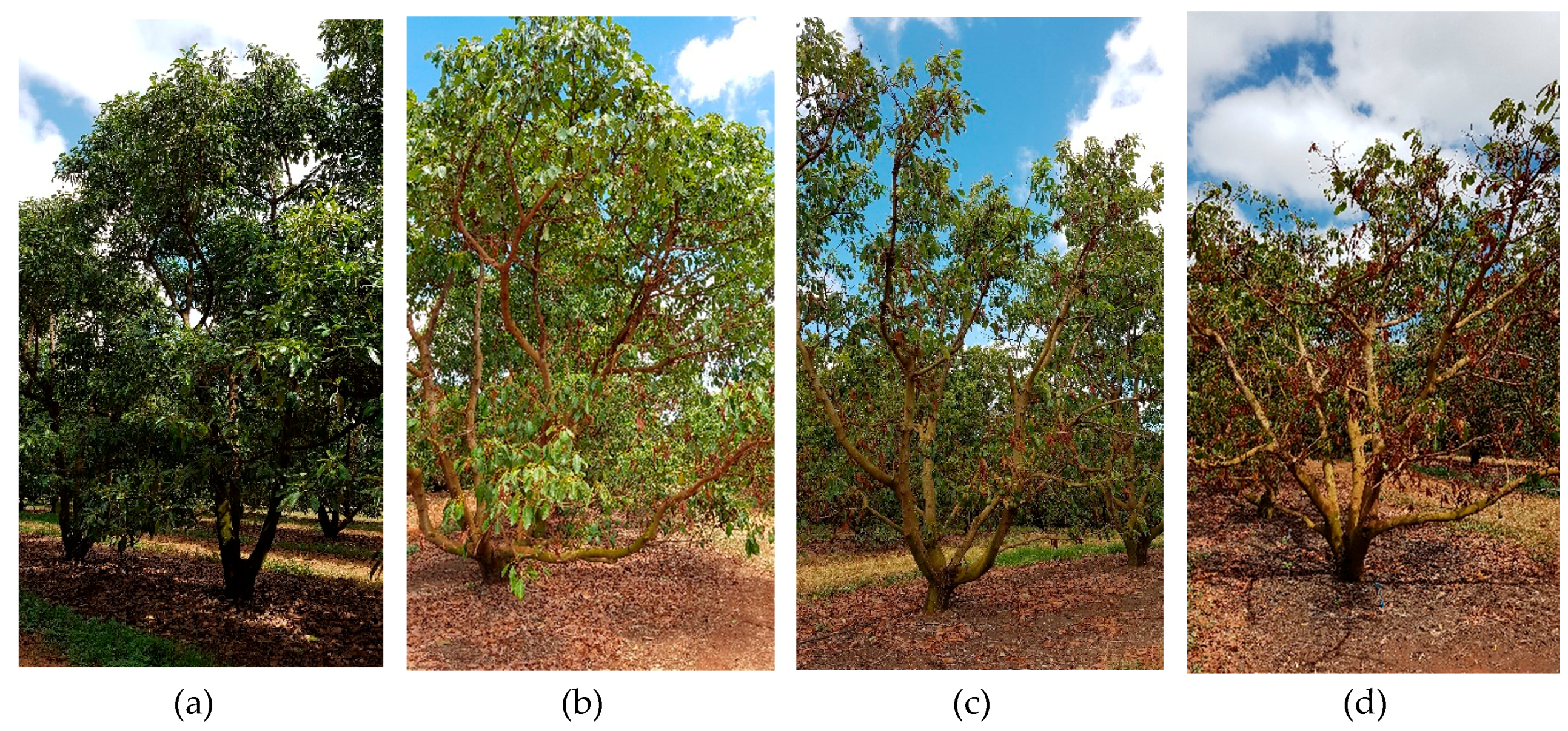
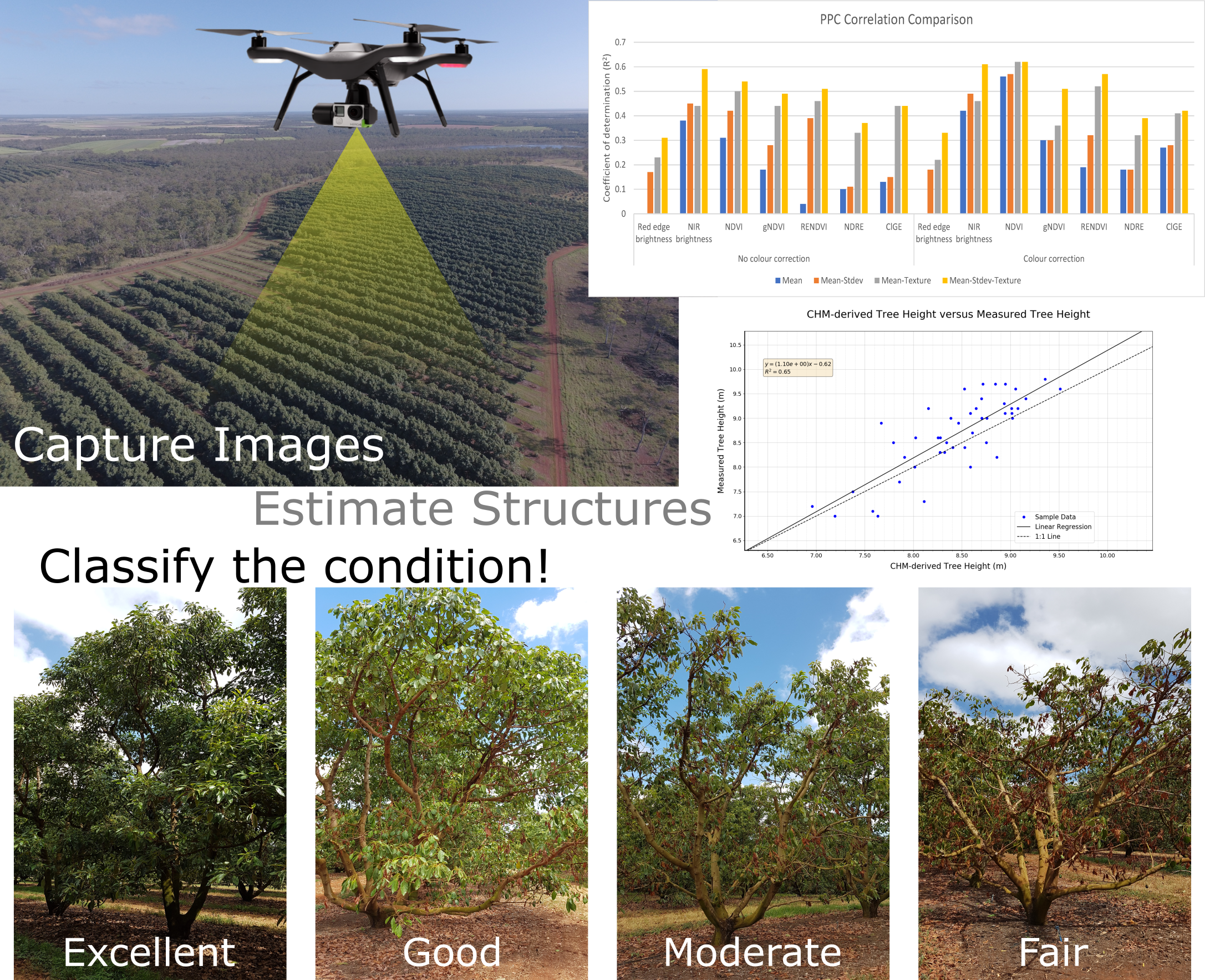
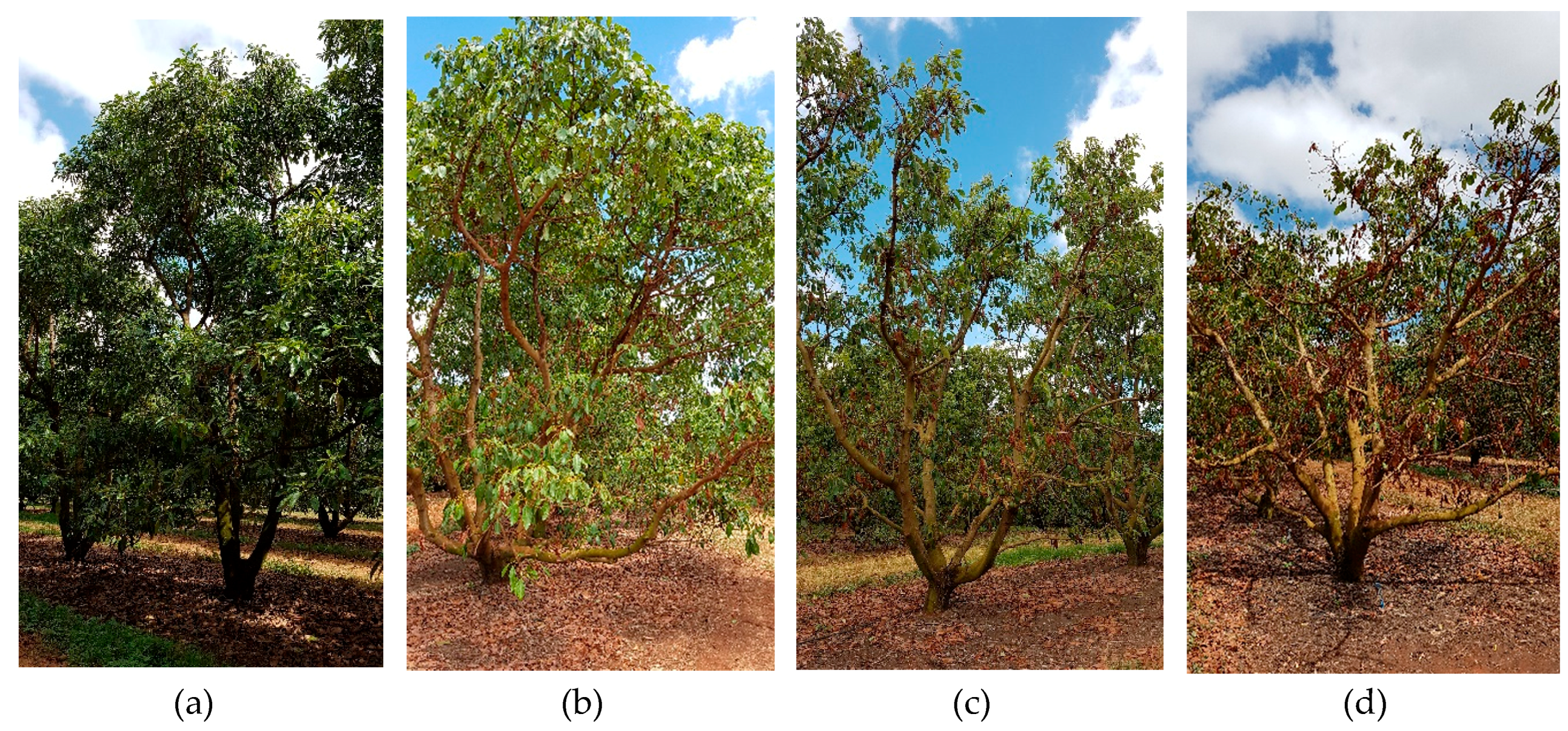
2.7. Canopy Condition Ranking
3. Results
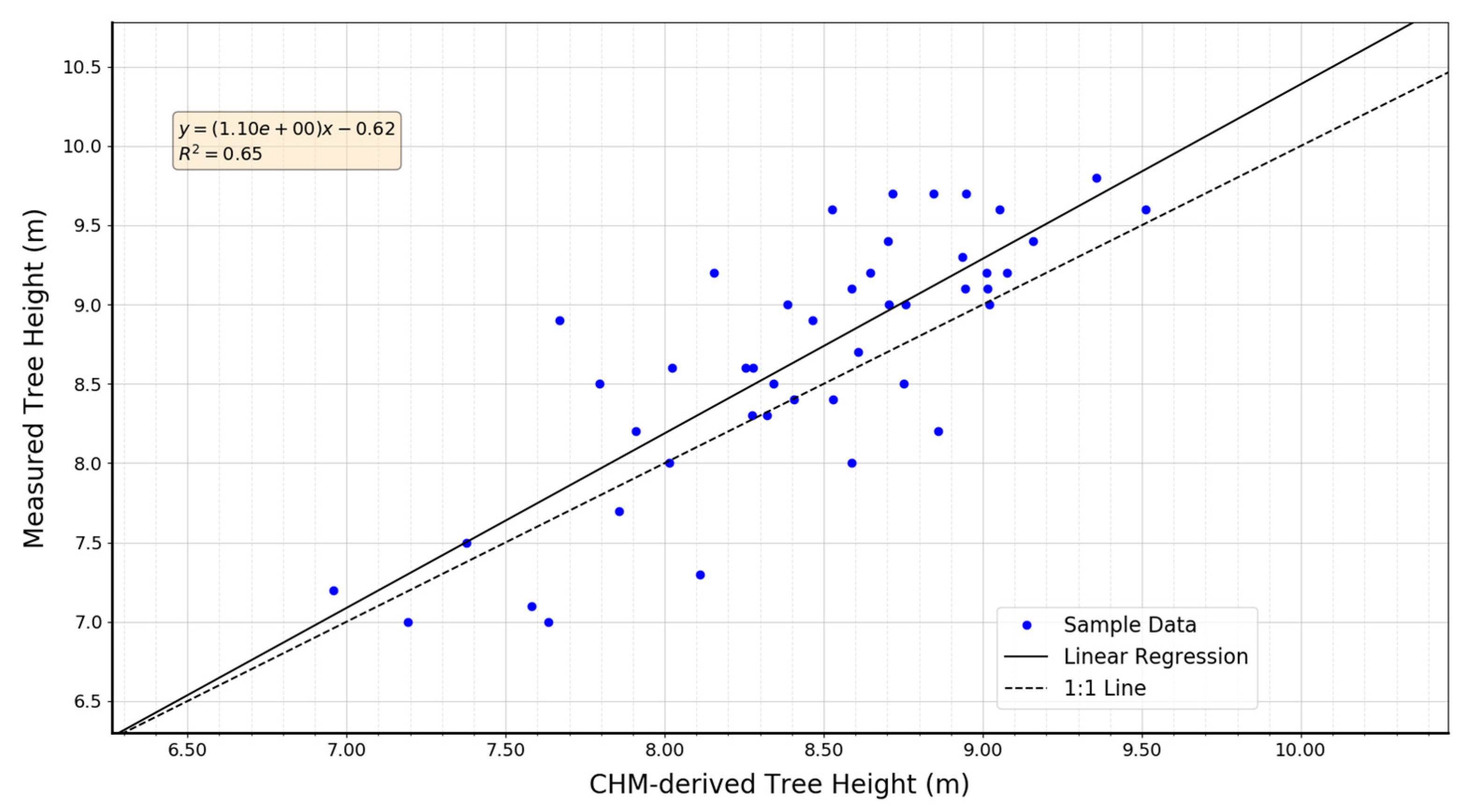
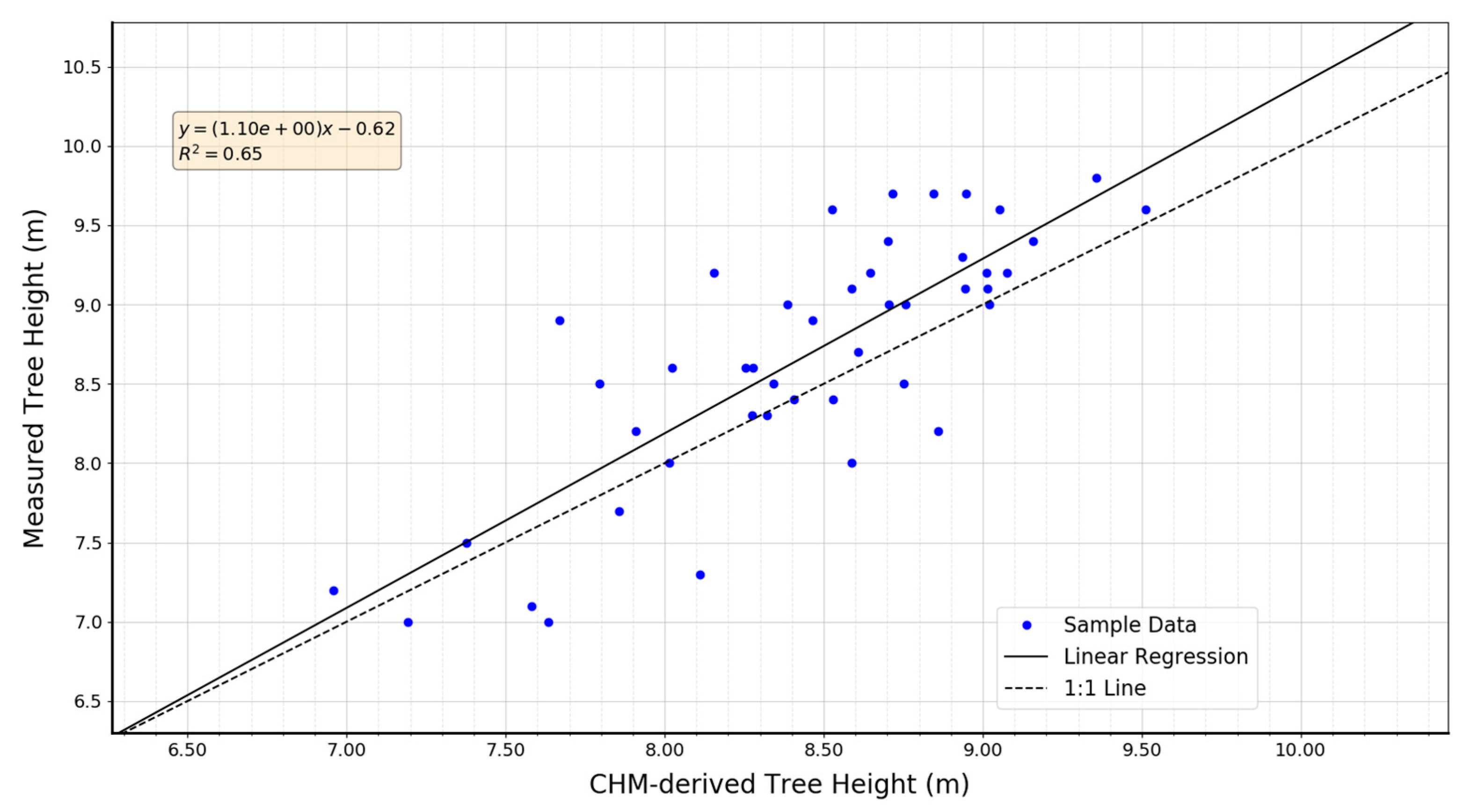
3.1. Accuracy of CHM-Derived Tree Height
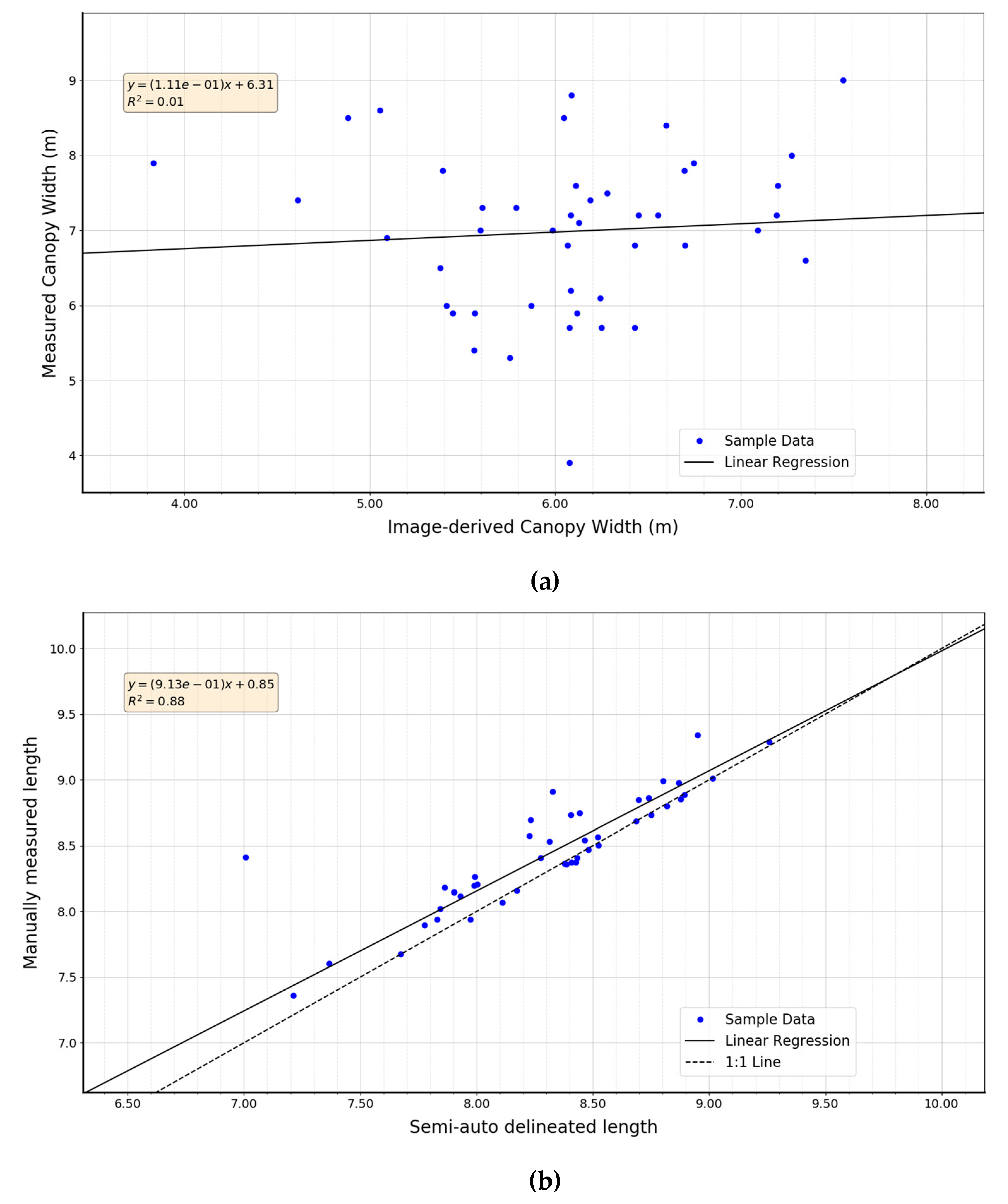
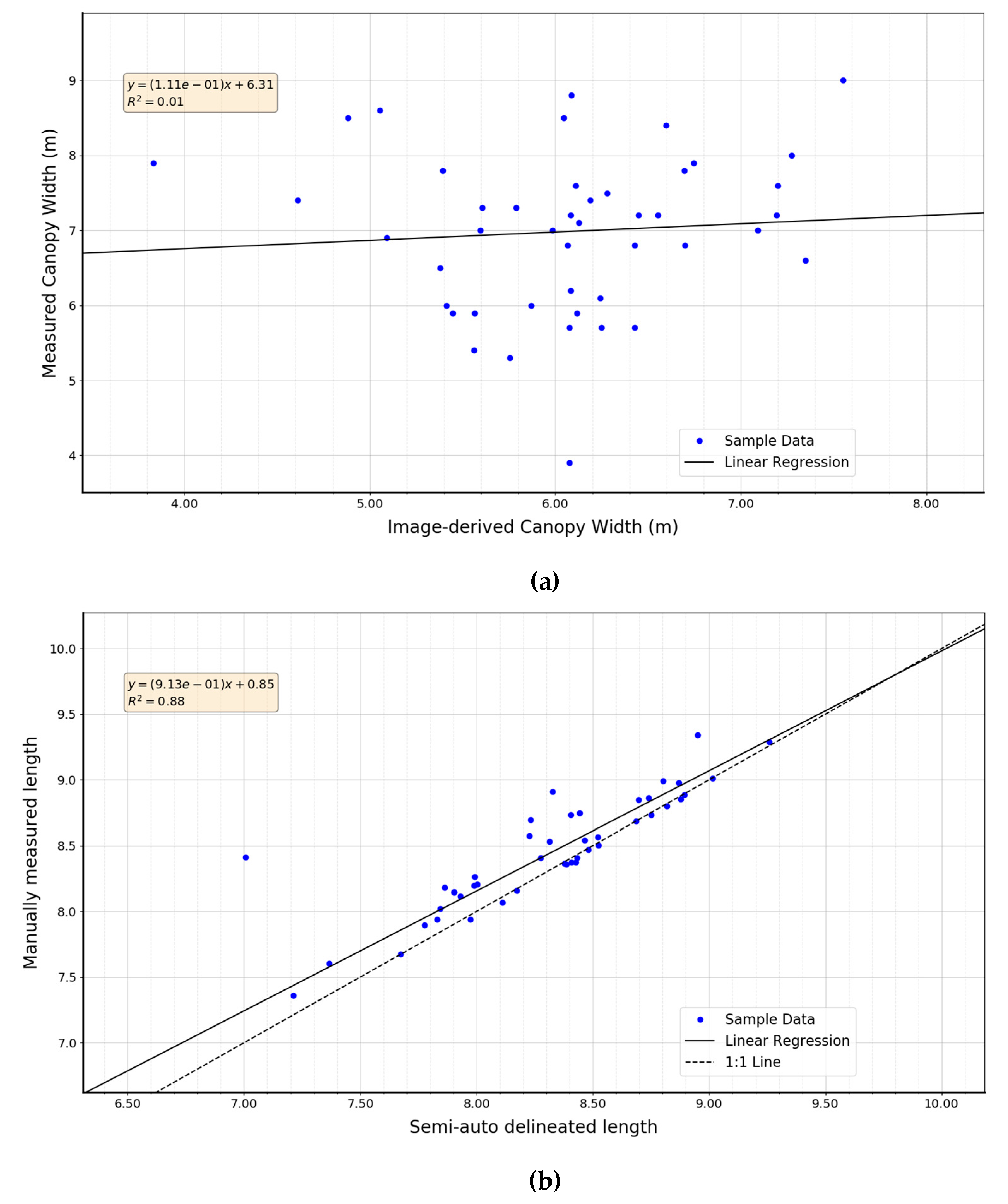
3.2. Accuracy of Image-Derived Crown Width and Length
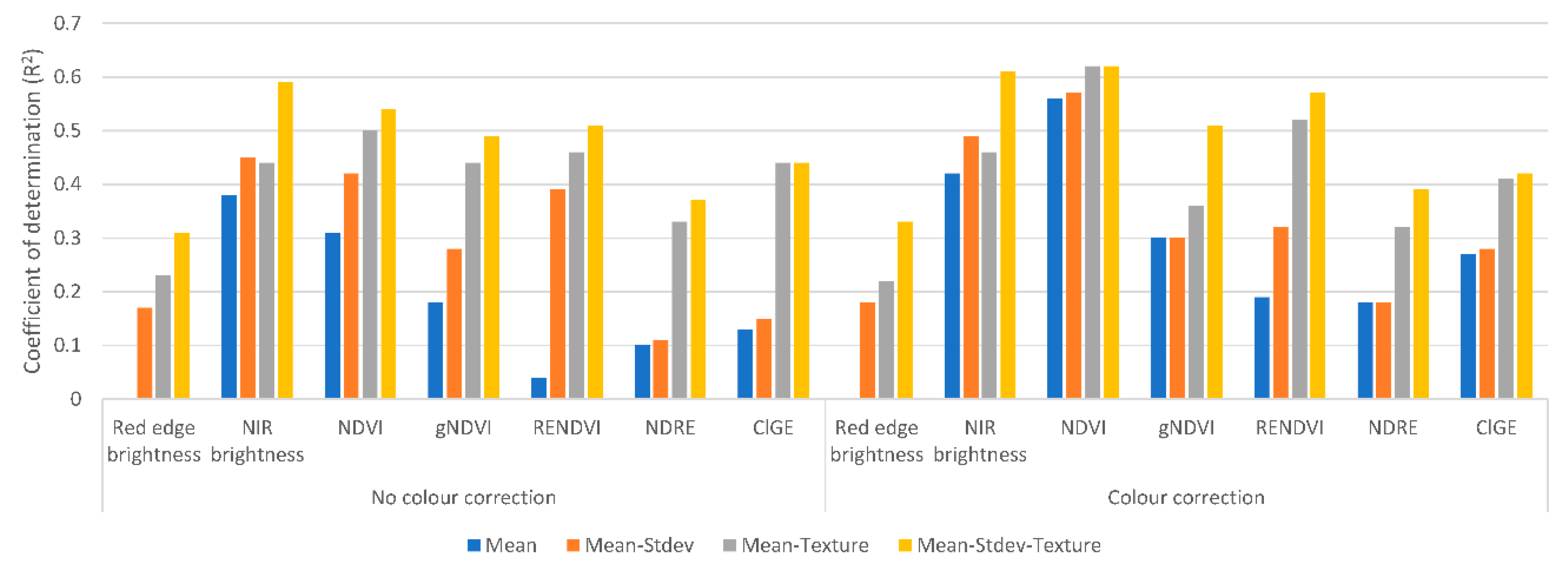
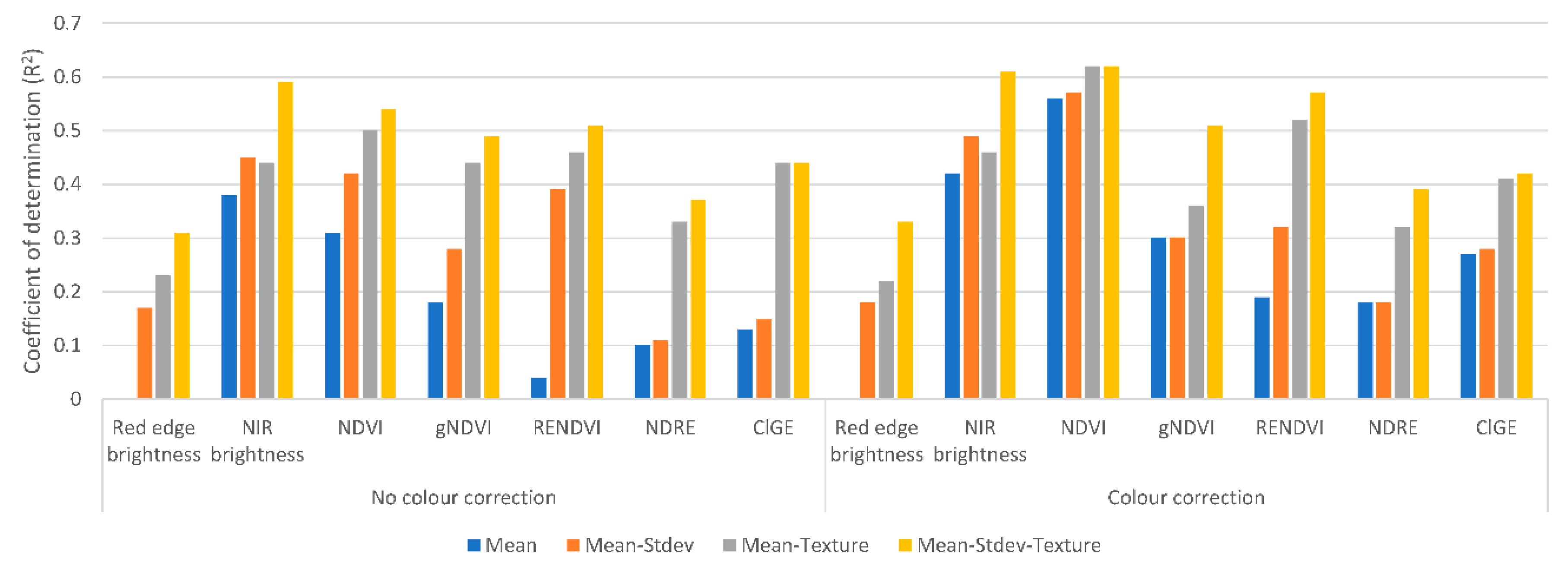
3.3. PPC Correlation
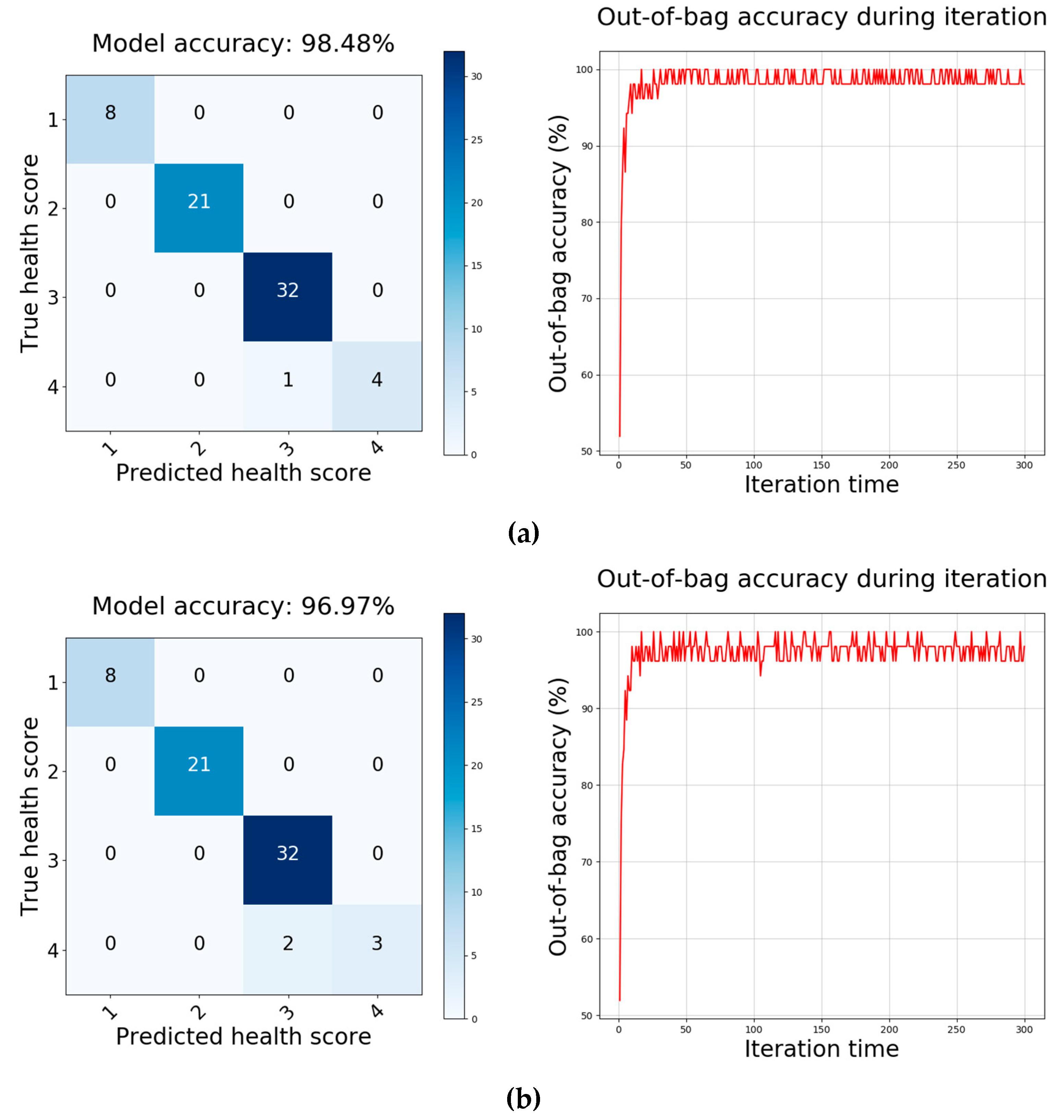
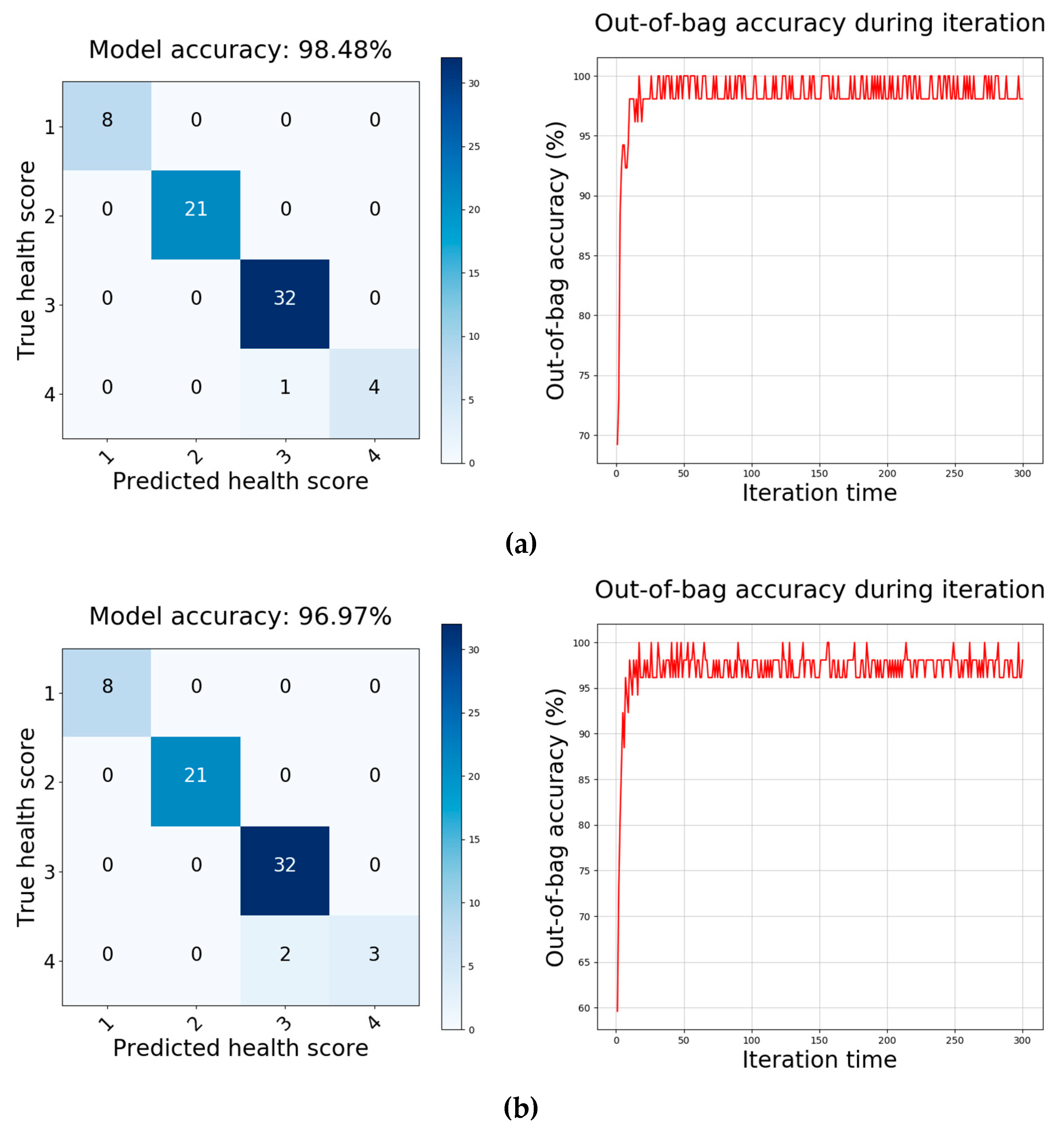
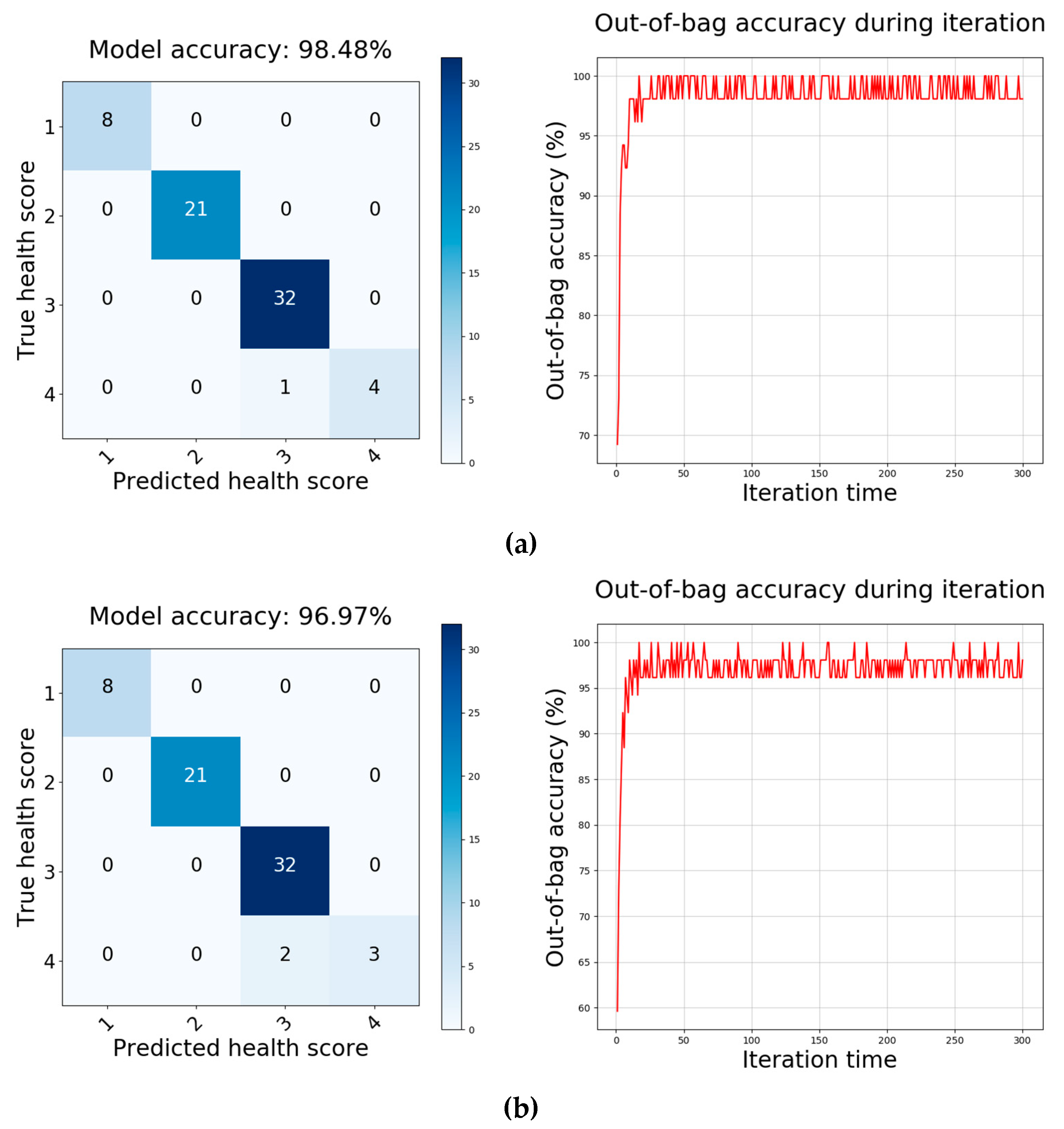
3.4. Tree Condition Prediction
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aiba, S.-I.; Akutsu, K.; Onoda, Y. Canopy structure of tropical and sub-tropical rain forests in relation to conifer dominance analysed with a portable LIDAR system. Ann. Bot. 2013, 112, 1899–1909. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boegh, E.; Soegaard, H.; Broge, N.; Hasager, C.B.; Jensen, N.O.; Schelde, K.; Thomsen, A. Airborne multispectral data for quantifying leaf area index, nitrogen concentration, and photosynthetic efficiency in agriculture. Remote Sens. Environ. 2002, 81, 179–193. [Google Scholar] [CrossRef]
- Saari, H.; Pellikka, I.; Pesonen, L.; Tuominen, S.; Heikkilä, J.; Holmlund, C.; Mäkynen, J.; Ojala, K.; Antila, T. Unmanned Aerial Vehicle (UAV) operated spectral camera system for forest and agriculture applications. In Remote Sensing for Agriculture, Ecosystems, and Hydrology XIII; Neale, C.M.U., Maltese, A., Richter, K., Eds.; SPIE: Bellingham, WA, USA, 2011. [Google Scholar] [CrossRef]
- Díaz-Varela, A.R.; de la Rosa, R.; León, L.; Zarco-Tejada, J.P. High-Resolution Airborne UAV Imagery to Assess Olive Tree Crown Parameters Using 3D Photo Reconstruction: Application in Breeding Trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef] [Green Version]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef] [Green Version]
- Johansen, K.; Raharjo, T.; McCabe, M. Using Multi-Spectral UAV Imagery to Extract Tree Crop Structural Properties and Assess Pruning Effects. Remote Sens. 2018, 10, 854. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Serrano, N.; Arquero, O.; Peña, J.M. High-Throughput 3-D Monitoring of Agricultural-Tree Plantations with Unmanned Aerial Vehicle (UAV) Technology. PLoS ONE 2015, 10, e0130479. [Google Scholar] [CrossRef] [PubMed]
- Bally, I.S.E.; Ibell, P.T. Improvement of Mango Tree Architecture. Acta Horticult. 2015, 1075, 59–64. [Google Scholar] [CrossRef]
- Schaffer, B.; Gil, P.M.; Mickelbart, M.V.; Whiley, A.W. Ecophysiology. In The Avocado: Botany, Production and Uses, 2nd ed.; Schaffer, B., Wolstenholme, B.N., Whiley, A.W., Eds.; CAB International: Wallingford, UK, 2013; pp. 168–199. [Google Scholar]
- Whiley, A.W. Avocado Production in Australia. In Avocado Production in Asia and the Pacific; Papademetriou, M.K., Ed.; Food and Agriculture Organization of the United Nations, Regional Office for Asia and the Pacific: Bangkok, Thailand, 2000; pp. 5–14. [Google Scholar]
- Robson, A.; Rahman, M.M.; Muir, J.; Saint, A.; Simpson, C.; Searle, C. Evaluating satellite remote sensing as a method for measuring yield variability in Avocado and Macadamia tree crops. Adv. Anim. Biosci. 2017, 8, 498–504. [Google Scholar] [CrossRef]
- Rahman, M.; Robson, A.; Bristow, M. Exploring the Potential of High Resolution WorldView-3 Imagery for Estimating Yield of Mango. Remote Sens. 2018, 10, 1866. [Google Scholar] [CrossRef]
- Viau, A.; Jang, J.-D.; Payan, V.; Devost, A. The Use of Airborne LIDAR and Multispectral Sensors for Orchard Trees Inventory and Characterization. Inf. Technol. Sustain. Fruit Veg. Prod. FRUTIC 2005, 5, 689–698. [Google Scholar]
- Johansen, K.; Duan, Q.; Tu, Y.-H.; Searle, C.; Wu, D.; Phinn, S.; Robson, A. Mapping the Condition of Macadamia Tree Crops Using Multi-spectral Drone and WorldView-3 Imagery. In Proceedings of the PA17—The International Tri-Conference for Precision Agriculture in 2017, Hamilton, New Zealand, 16–18 October 2017. [Google Scholar]
- Searle, C. Macadamia Tree Health Condition Assessment; Tu, Y.-H., Ed.; Personal Communication: Bundaberg, Australia, 4 February 2017. [Google Scholar]
- Robson, A.; Rahman, M.M.; Muir, J. Using Worldview Satellite Imagery to Map Yield in Avocado (Persea americana): A Case Study in Bundaberg, Australia. Remote Sens. 2017, 9, 1223. [Google Scholar] [CrossRef]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sens. 2017, 2017, 17. [Google Scholar] [CrossRef]
- Wulder, M. Optical remote-sensing techniques for the assessment of forest inventory and biophysical parameters. Prog. Phys. Geogr. Earth Environ. 1998, 22, 449–476. [Google Scholar] [CrossRef]
- Johansen, K.; Clark, A.; Phinn, S.; Witte, C. Mapping plant projective cover in riparian zones: Integration of field and high spatial resolution QuickBird and LiDAR data. In Proceedings of the 14th Australasian Remote Sensing and Photogrammetry Conference, Darwin, Australia, 27 September–4 October 2008. [Google Scholar]
- Pekin, B.; Macfarlane, C. Measurement of Crown Cover and Leaf Area Index Using Digital Cover Photography and Its Application to Remote Sensing. Remote Sens. 2009, 1, 1298–1320. [Google Scholar] [CrossRef] [Green Version]
- Chianucci, F.; Disperati, L.; Guzzi, D.; Bianchini, D.; Nardino, V.; Lastri, C.; Rindinella, A.; Corona, P. Estimation of canopy attributes in beech forests using true colour digital images from a small fixed-wing UAV. Int. J. Appl. Earth Obs. Geoinf. 2016, 47, 60–68. [Google Scholar] [CrossRef] [Green Version]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, J.P. Quantitative Remote Sensing at Ultra-High Resolution with UAV Spectroscopy: A Review of Sensor Technology, Measurement Procedures, and Data Correction Workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Staben, G.W.; Lucieer, A.; Evans, K.G.; Scarth, P.; Cook, G.D. Obtaining biophysical measurements of woody vegetation from high resolution digital aerial photography in tropical and arid environments: Northern Territory, Australia. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 204–220. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating Tree Detection and Segmentation Routines on Very High Resolution UAV LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Jaakkola, A. Mini-UAV-Borne LIDAR for Fine-Scale Mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 426–430. [Google Scholar] [CrossRef]
- Zhao, F.; Strahler, A.H.; Schaaf, C.L.; Yao, T.; Yang, X.; Wang, Z.; Schull, M.A.; Román, M.O.; Woodcock, C.E.; Olofsson, P.; et al. Measuring gap fraction, element clumping index and LAI in Sierra Forest stands using a full-waveform ground-based lidar. Remote Sens. Environ. 2012, 125, 73–79. [Google Scholar] [CrossRef]
- Wu, D.; Phinn, S.; Johansen, K.; Robson, A.; Muir, J.; Searle, C. Estimating Changes in Leaf Area, Leaf Area Density, and Vertical Leaf Area Profile for Mango, Avocado, and Macadamia Tree Crowns Using Terrestrial Laser Scanning. Remote Sens. 2018, 10, 1750. [Google Scholar] [CrossRef]
- Dandois, J.; Baker, M.; Olano, M.; Parker, G.; Ellis, E. What is the Point? Evaluating the Structure, Color, and Semantic Traits of Computer Vision Point Clouds of Vegetation. Remote Sens. 2017, 9, 355. [Google Scholar] [CrossRef]
- Getzin, S.; Nuske, R.S.; Wiegand, K. Using Unmanned Aerial Vehicles (UAV) to Quantify Spatial Gap Patterns in Forests. Remote Sens. 2014, 6, 6988–7004. [Google Scholar] [CrossRef] [Green Version]
- Robbertse, H.; Fivaz, J.; Menzel, C. A Reevaluation of Tree Model, Inflorescence Morphology, and Sex Ratio in Lychee (Litchi Chinensis Sonn.). J. Am. Soc. Horticult. Sci. 1995, 120, 914–920. [Google Scholar]
- Hallé, F.; Oldeman, R.A.A.; Halle, F.; Oldeman, R.A.A.; Tomlinson, P.B. Tropical Trees and Forests: An Architectural Analysis; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1978. [Google Scholar]
- Salgadoe, S.A.; Robson, J.A.; Lamb, W.D.; Dann, K.E.; Searle, C. Quantifying the Severity of Phytophthora Root Rot Disease in Avocado Trees Using Image Analysis. Remote Sens. 2018, 10, 226. [Google Scholar] [CrossRef]
- Lillesand, T.M.; Kiefer, R.W.; Chipman, J.W. Remote Sensing and Image Interpretation, 7th ed.; Lillesand, T.M., Kiefer, R.W., Chipman, J.W., Eds.; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Jensen, J.R. Introductory Digital Image Processing: A Remote Sensing Perspective, 4th ed.; Pearson Education, Inc.: Glenview, IL, USA, 2016. [Google Scholar]
- Heege, H.J. Precision in Crop Farming: Site Specific Concepts and Sensing Methods: Applications and Results; Springer: Berlin, Germany, 2013; p. 356. ISBN 978-94-007-6760-7. [Google Scholar] [CrossRef]
- Schaffer, B.; Wolstenholme, B.N.; Whiley, A.W. Introduction. In The Avocado: Botany, Production and Uses, 2nd ed.; Schaffer, B., Wolstenholme, B.N., Whiley, A.W., Eds.; CAB International: Wallingford, UK, 2013; pp. 1–9. [Google Scholar]
- Newett, S.; McCarthy, A.; Dirou, J.; Miller, J.; Hofman, P.; Ireland, G.; Pegg, K.; Kernot, I.; Searle, C.; Ledger, S.; et al. Avocado Information Kit. Agrilink, Your Growing Guide to Better Farming Guide; Queensland Horticulture Institute: Brisbane, Australia, 2001. [Google Scholar]
- Laser Technology Inc. LTI TruPulse 360/360B User’s Manual, 2nd ed.; Laser Technology, Inc.: Centennial, CO, USA, 2009. [Google Scholar]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Tu, Y.-H.; Phinn, S.; Johansen, K.; Robson, A. Assessing Radiometric Correction Approaches for Multi-Spectral UAS Imagery for Horticultural Applications. Remote Sens. 2018, 10, 1684. [Google Scholar] [CrossRef]
- Wang, C.; Myint, S.W. A Simplified Empirical Line Method of Radiometric Calibration for Small Unmanned Aircraft Systems-Based Remote Sensing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1876–1885. [Google Scholar] [CrossRef]
- Hakala, T.; Honkavaara, E.; Saari, H.; Mäkynen, J.; Kaivosoja, J.; Pesonen, L.; Pölönen, I. Spectral imaging from UAVs under varying illumination conditions. In UAV-g2013; Grenzdörffer, G., Bill, R., Eds.; International Society for Photogrammetry and Remote Sensing (ISPRS): Rostock, Germany, 2013; Volume XL-1/W2, pp. 189–194. [Google Scholar]
- Xie, Q.; Dash, J.; Huang, W.; Peng, D.; Qin, Q.; Mortimer, H.; Casa, R.; Pignatti, S.; Laneve, G.; Pascucci, S.; et al. Vegetation Indices Combining the Red and Red-Edge Spectral Information for Leaf Area Index Retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1482–1493. [Google Scholar] [CrossRef] [Green Version]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating Multispectral Images and Vegetation Indices for Precision Farming Applications from UAV Images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef] [Green Version]
- Trimble Germany GmbH. eCognition Developer 9.3 User Guide; Trimble Germany GmbH.: Munich, Germany, 2018. [Google Scholar]
- Kamal, M.; Phinn, S.; Johansen, K. Object-Based Approach for Multi-Scale Mangrove Composition Mapping Using Multi-Resolution Image Datasets. Remote Sens. 2015, 7, 4753–4783. [Google Scholar] [CrossRef] [Green Version]
- Smit, J.L.; Sithole, G.; Strever, A.E. Vine Signal Extraction—An Application of Remote Sensing in Precision Viticulture. S. Afr. J. Enol. Viticult. 2010, 31, 65–74. [Google Scholar] [CrossRef]
- Kayitakire, F.; Hamel, C.; Defourny, P. Retrieving forest structure variables based on image texture analysis and IKONOS-2 imagery. Remote Sens. Environ. 2006, 102, 390–401. [Google Scholar] [CrossRef]
- Colombo, R.; Bellingeri, D.; Fasolini, D.; Marino, C.M. Retrieval of leaf area index in different vegetation types using high resolution satellite data. Remote Sens. Environ. 2003, 86, 120–131. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef]
- Johansen, K.; Coops, N.C.; Gergel, S.E.; Stange, Y. Application of high spatial resolution satellite imagery for riparian and forest ecosystem classification. Remote Sens. Environ. 2007, 110, 29–44. [Google Scholar] [CrossRef]
- Genuer, R.; Poggi, J.-M.; Tuleau-Malot, C.; Villa-Vialaneix, N. Random Forests for Big Data. Big Data Res. 2017, 9, 28–46. [Google Scholar] [CrossRef]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Louppe, G. Understanding Random Forests: From Theory to Practice. arXiv, 2014; arXiv:1407.7502. [Google Scholar]
- Breiman, L. Classification and Regression Trees; Wadsworth International Group: Belmont, CA, USA, 1984. [Google Scholar]
- Honkavaara, E.; Khoramshahi, E. Radiometric Correction of Close-Range Spectral Image Blocks Captured Using an Unmanned Aerial Vehicle with a Radiometric Block Adjustment. Remote Sens. 2018, 10, 256. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M.N. Spectral Reflectance Changes Associated with Autumn Senescence of Aesculus hippocastanum L. and Acer platanoides L. Leaves. Spectral Features and Relation to Chlorophyll Estimation. J. Plant Physiol. 1994, 143, 286–292. [Google Scholar] [CrossRef]
- Näsi, R.; Viljanen, N.; Oliveira, R.; Kaivosoja, J.; Niemeläinen, O.; Hakala, T.; Markelin, L.; Nezami, S.; Suomalainen, J.; Honkavaara, E. Optimizing Radiometric Processing and Feature Extraction of Drone Based Hyperspectral Frame Format Imagery for Estimation of Yield Quantity and Quality of a Grass Sward. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-3, 1305–1310. [Google Scholar] [CrossRef]
- Robson, A.J.; Petty, J.; Joyce, D.C.; Marques, J.R.; Hofman, P.J. High resolution remote sensing, GIS and Google Earth for avocado fruit quality mapping and tree number auditing. In Proceedings of the International Society for Horticultural Science (ISHS), Leuven, Belgium, 9 December 2016; pp. 589–596. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ranking | 1- Excellent | 2- Good | 3- Moderate | 4- Fair |
|---|---|---|---|---|
| Count | 8 | 21 | 32 | 5 |
| Vegetation Index | Formula |
|---|---|
| Normalised Difference Vegetation Index (NDVI) | |
| Green Normalised Difference Vegetation Index (gNDVI) | |
| Red Edge Normalised Difference Vegetation Index (RENDVI) | |
| Normalised Difference Red Edge Index (NDRE) | |
| Green Chlorophyll Index (ClGE) |
| Classifier | Feature | Feature Importance |
|---|---|---|
| 7-features classifier (Figure 10a) | Mean NIR | 19.76% |
| CHM-derived tree height | 18.39% | |
| GLCM Standard deviation | 14.62% | |
| GLCM contrast | 12.77% | |
| GLCM dissimilarity | 12.06% | |
| Standard deviation | 11.59% | |
| GLCM homogeneity | 10.81% | |
| 2-features classifier (Figure 10b) | CHM-derived tree height | 51.16% |
| NIR-derived PPC | 48.84% |
| Classifier | Feature | Feature Importance |
|---|---|---|
| 7-features classifier (Figure 11a) | Mean NDVI | 22.30% |
| GLCM standard deviation | 17.31% | |
| CHM-derived tree height | 15.71% | |
| Standard deviation | 12.96% | |
| GLCM homogeneity | 10.81% | |
| GLCM contrast | 10.75% | |
| GLCM dissimilarity | 10.16% | |
| 2-features classifier (Figure 11b) | CHM-derived tree height | 51.44% |
| NDVI-derived PPC | 48.56% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, Y.-H.; Johansen, K.; Phinn, S.; Robson, A. Measuring Canopy Structure and Condition Using Multi-Spectral UAS Imagery in a Horticultural Environment. Remote Sens. 2019, 11, 269. https://doi.org/10.3390/rs11030269
Tu Y-H, Johansen K, Phinn S, Robson A. Measuring Canopy Structure and Condition Using Multi-Spectral UAS Imagery in a Horticultural Environment. Remote Sensing. 2019; 11(3):269. https://doi.org/10.3390/rs11030269
Chicago/Turabian StyleTu, Yu-Hsuan, Kasper Johansen, Stuart Phinn, and Andrew Robson. 2019. "Measuring Canopy Structure and Condition Using Multi-Spectral UAS Imagery in a Horticultural Environment" Remote Sensing 11, no. 3: 269. https://doi.org/10.3390/rs11030269
APA StyleTu, Y.-H., Johansen, K., Phinn, S., & Robson, A. (2019). Measuring Canopy Structure and Condition Using Multi-Spectral UAS Imagery in a Horticultural Environment. Remote Sensing, 11(3), 269. https://doi.org/10.3390/rs11030269