Assessment of Level-3 Gridded Global Precipitation Mission (GPM) Products Over Oceans



Abstract
1. Introduction
2. Materials and Methods
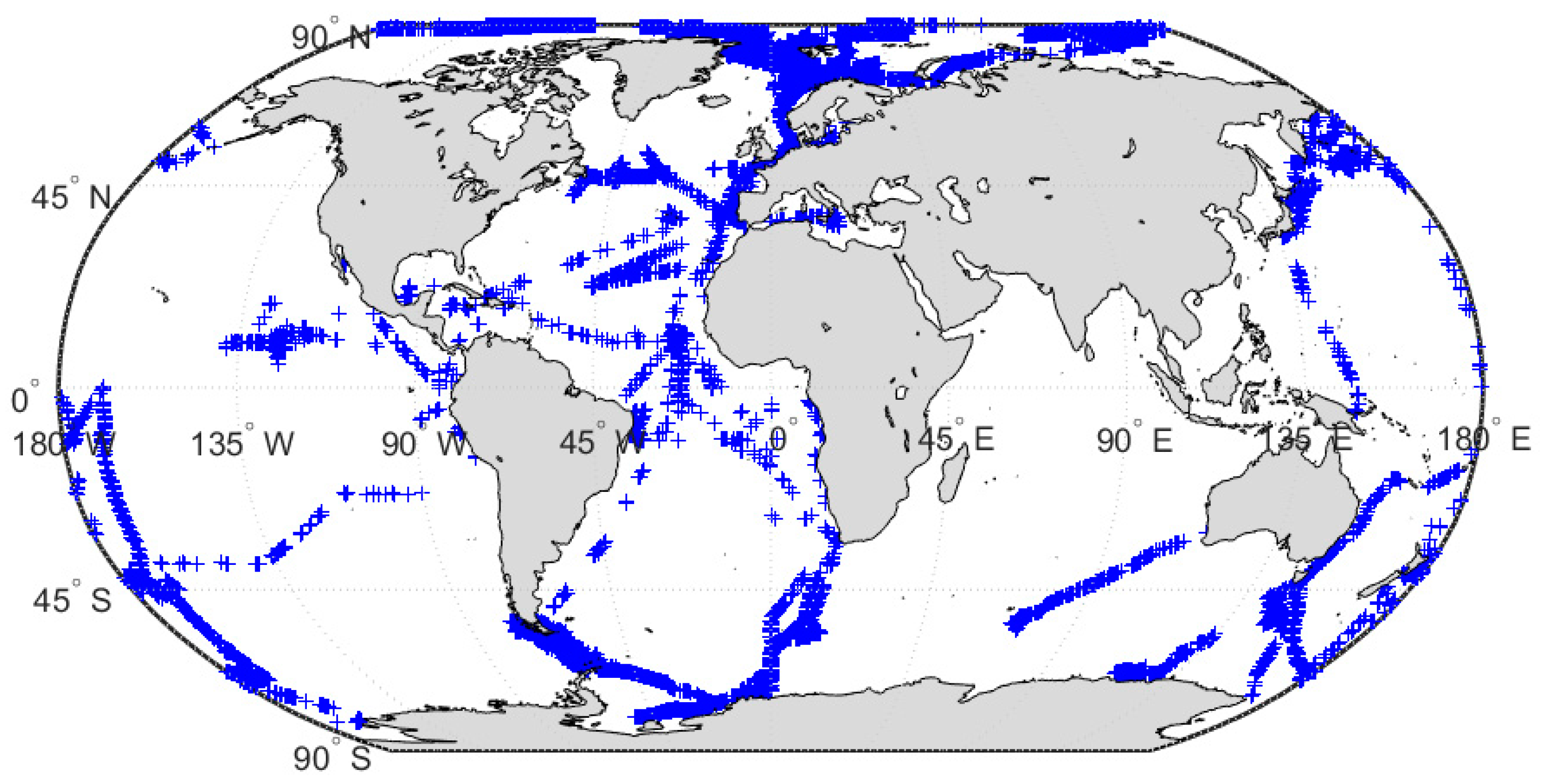
2.1. Data
2.2. Spatio-Temporal Data Alignment
2.3. Performance Analysis
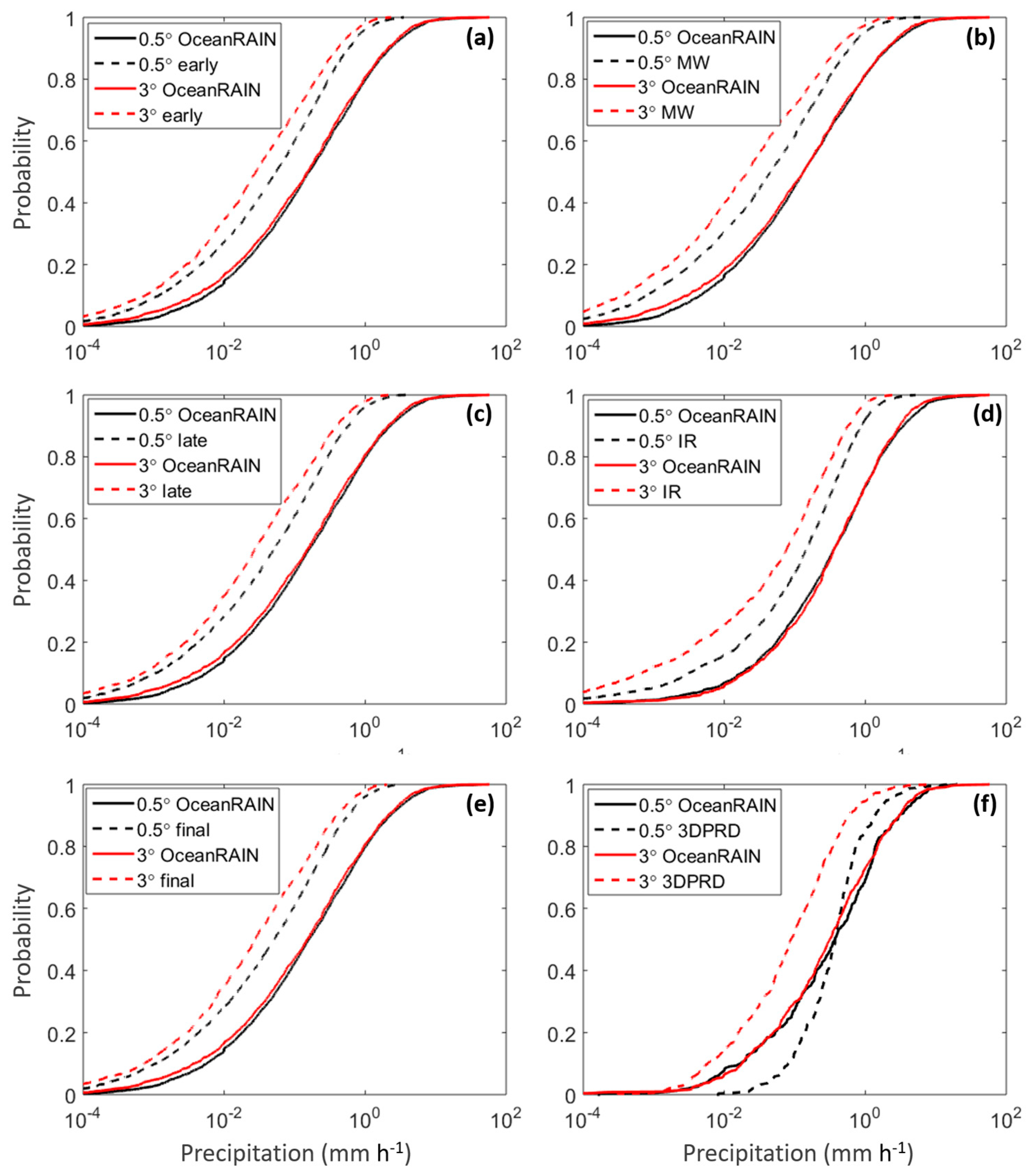
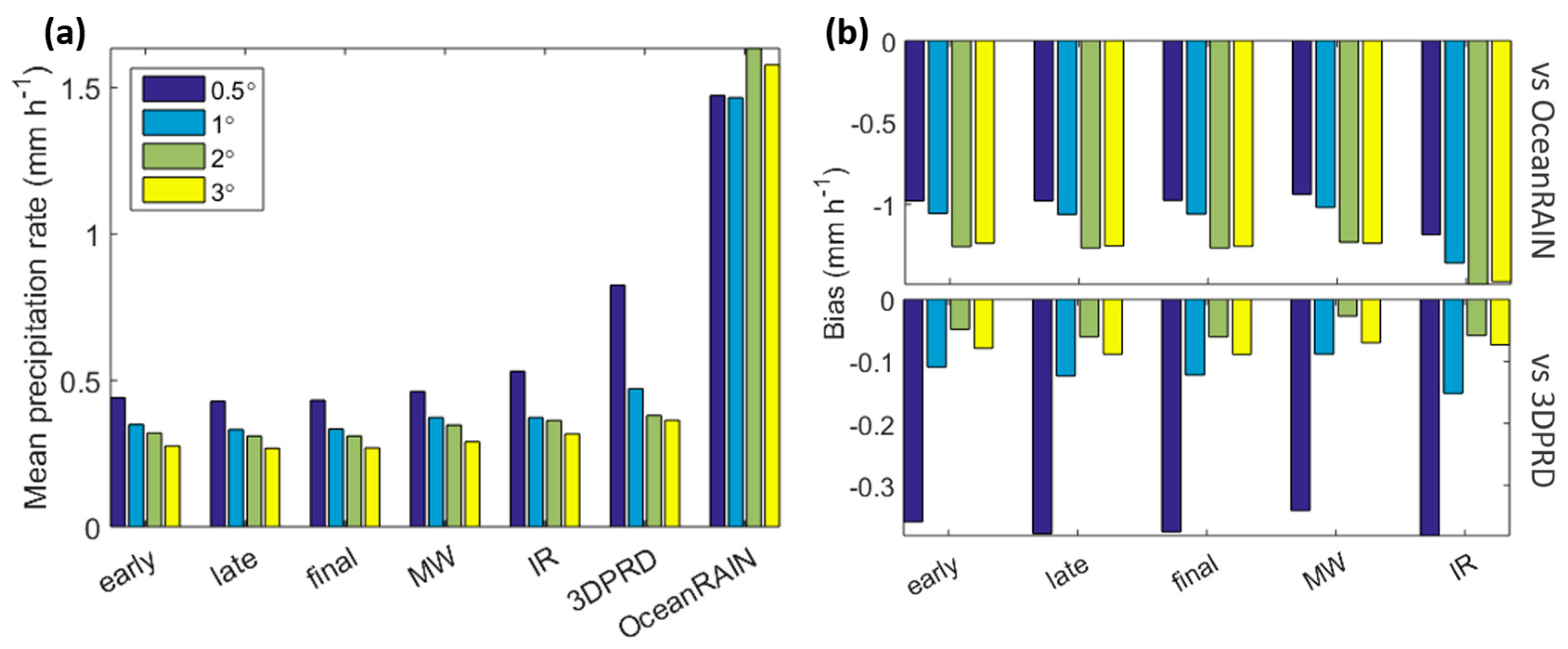
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | |||
|---|---|---|---|
| Reference | PSat ≥ th | Psat < th | |
| PRef ≥ th | H | M | |
| PRef < th | F | Z | |
References
- Hong, Y.; Adler, R.F.; Negri, A.; Huffman, G.J. Flood and landslide applications of near real-time satellite rainfall products. Nat. Hazards 2007, 43, 285–294. [Google Scholar] [CrossRef]
- Hossain, F.; Anagnostou, E.N. Assessment of current passive-microwave- and infrared-based satellite rainfall remote sensing for flood prediction. J. Geophys. Res. Atmos. 2004, 109, D07102. [Google Scholar] [CrossRef]
- Johnson, G.E.; Achutuni, V.R.; Thiruvengadachari, S.; Kogan, F. The Role of NOAA Satellite Data in Drought Early Warning and Monitoring: Selected Case Studies. In Drought Assessment, Management, and Planning: Theory and Case Studies; Natural Resource Management and Policy; Springer: Boston, MA, USA, 1993; pp. 31–47. ISBN 978-1-4613-6416-0. [Google Scholar]
- Krajewski, W.F.; Anderson, M.C.; Eichinger, W.E.; Entekhabi, D.; Hornbuckle, B.K.; Houser, P.R.; Katul, G.G.; Kustas, W.P.; Norman, J.M.; Peters-Lidard, C. A remote sensing observatory for hydrologic sciences: A genesis for scaling to continental hydrology. Water Resour. Res. 2006, 42. [Google Scholar] [CrossRef]
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The global precipitation measurement mission. Bull. Am. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Kidd, C.; Becker, A.; Huffman, G.J.; Muller, C.L.; Joe, P.; Skofronick-Jackson, G.; Kirschbaum, D.B. So, how much of the Earth’s surface is covered by rain gauges? Bull. Am. Meteorol. Soc. 2017, 98, 69–78. [Google Scholar] [CrossRef]
- Bumke, K.; Fennig, K.; Strehz, A.; Mecking, R.; Schröder, M. HOAPS precipitation validation with ship-borne rain gauge measurements over the Baltic Sea. Tellus Dyn. Meteorol. Oceanogr. 2012, 64, 18486. [Google Scholar] [CrossRef]
- Skofronick-Jackson, G.; Kirschbaum, D.; Petersen, W.; Huffman, G.; Kidd, C.; Stocker, E.; Kakar, R. The Global Precipitation Measurement (GPM) mission’s scientific achievements and societal contributions: Reviewing four years of advanced rain and snow observations. Q. J. R. Meteorol. Soc. 2018, 144, 27–48. [Google Scholar] [CrossRef]
- Anagnostou, E.N.; Krajewski, W.F.; Smith, J. Uncertainty quantification of mean-areal radar-rainfall estimates. J. Atmos. Ocean. Technol. 1999, 16, 206–215. [Google Scholar] [CrossRef]
- Kent, E.; Hall, A.D.; Leader, V.T.T. The voluntary observing ship (VOS) scheme. In Proceedings of the 2010 AGU Ocean Sciences Meeting, Portland, OR, USA, 22–26 February 2010; American Geophysical Union: Washington, DC, USA. [Google Scholar]
- Smith, S.R.; Rettig, J.; Rolph, J.; Hu, J.; Kent, E.C.; Schulz, E.; Verein, R.; Rutz, S.; Paver, C. The data management system for the Shipboard Automated Meteorological and Oceanographic System (SAMOS) initiative. In Proceedings of the OceanObs’ 09: Sustained Ocean Observations and Information for Society Conference, Venice, Italy, 21–25 September 2009; Volume 2. [Google Scholar]
- Hayes, S.P.; Mangum, L.J.; Picaut, J.; Sumi, A.; Takeuchi, K. TOGA-TAO: A moored array for real-time measurements in the tropical Pacific Ocean. Bull. Am. Meteorol. Soc. 1991, 72, 339–347. [Google Scholar] [CrossRef]
- Serra, Y.L. Precipitation measurements from the Tropical Moored Array: A review and look ahead. Q. J. R. Meteorol. Soc. 2018, 144, 221–234. [Google Scholar] [CrossRef]
- Bowman, K.P. Comparison of TRMM precipitation retrievals with rain gauge data from ocean buoys. J. Clim. 2005, 18, 178–190. [Google Scholar] [CrossRef]
- Serra, Y.L.; McPhaden, M.J. In situ observations of diurnal variability in rainfall over the tropical Pacific and Atlantic Oceans. J. Clim. 2004, 17, 3496–3509. [Google Scholar] [CrossRef]
- Serra, Y.L.; McPhaden, M.J. Multiple time-and space-scale comparisons of ATLAS buoy rain gauge measurements with TRMM satellite precipitation measurements. J. Appl. Meteorol. 2003, 42, 1045–1059. [Google Scholar] [CrossRef]
- Levizzani, V.; Kidd, C.; Aonashi, K.; Bennartz, R.; Ferraro, R.R.; Huffman, G.J.; Roca, R.; Turk, F.J.; Wang, N.-Y. The activities of the International Precipitation Working Group. Q. J. R. Meteorol. Soc. 2018, 144, 3–15. [Google Scholar] [CrossRef]
- Klepp, C. The oceanic shipboard precipitation measurement network for surface validation—OceanRAIN. Atmos. Res. 2015, 163, 74–90. [Google Scholar] [CrossRef]
- Kucera, P.; Klepp, C. Validation of High Resolution IMERG Satellite Precipitation over the Global Oceans using OceanRAIN. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 23–28 April 2017; Volume 19, p. 11794. [Google Scholar]
- Burdanowitz, J.; Klepp, C.; Bakan, S.; Buehler, S.A. Towards an along-track validation of HOAPS precipitation using OceanRAIN optical disdrometer data over the Atlantic Ocean. Q. J. R. Meteorol. Soc. 2018, 144, 235–254. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Braithwaite, D.; Hsu, K.; Joyce, R.; Xie, P.; Yoo, S.-H. NASA Global Precipitation Measurement (GPM) Integrated Multi-Satellite Retrievals for GPM (IMERG); Algorithm Theoretical Basis Document (ATBD) Version 4.5; NASA: Greenbelt, MD, USA, 2015; 30p.
- Iguchi, T.; Kozu, T.; Meneghini, R.; Awaka, J.; Okamoto, K. Rain-profiling algorithm for the TRMM precipitation radar. J. Appl. Meteorol. 2000, 39, 2038–2052. [Google Scholar] [CrossRef]
- Iguchi, T.; Kozu, T.; Kwiatkowski, J.; Meneghini, R.; Awaka, J.; Okamoto, K. ’ichi Uncertainties in the rain profiling algorithm for the TRMM precipitation radar. J. Meteorol. Soc. Jpn. Ser. II 2009, 87, 1–30. [Google Scholar] [CrossRef]
- Wolff, D.B.; Fisher, B.L. Comparisons of instantaneous TRMM ground validation and satellite rain-rate estimates at different spatial scales. J. Appl. Meteorol. Climatol. 2008, 47, 2215–2237. [Google Scholar] [CrossRef]
- Yang, S.; Olson, W.S.; Wang, J.-J.; Bell, T.L.; Smith, E.A.; Kummerow, C.D. Precipitation and latent heating distributions from satellite passive microwave radiometry. Part II: Evaluation of estimates using independent data. J. Appl. Meteorol. Climatol. 2006, 45, 721–739. [Google Scholar] [CrossRef]
- Petersen, W.; Kirstetter, P.; Wolff, D.; Kidd, C.; Tokay, A.; Chandrasekar, V.; Gatlin, P.; Tan, J.; Grecu, M.; Huffman, G. GPM Level 1 Science Requirements: Science and Performance Viewed from the Ground. In Proceedings of the 8th International Precipitation Working Group Workshop, Bologna, Italy, 3–7 October 2016. [Google Scholar]
- Lempio, G.E.; Bumke, K. Measurements of solid precipitation with an optical disdrometer. Int. BALTEX Secr. Publ. Ser. 2007, 38, 123–124. [Google Scholar] [CrossRef]
- Klepp, C.; Michel, S.; Protat, A.; Burdanowitz, J.; Albern, N.; Louf, V.; Bakan, S.; Dahl, A.; Thiele, T. Ocean Rainfall and Ice-Phase Precipitation Measurement Network—OceanRAIN-M; World Data Center for Climate (WDCC) at DKRZ: Hamburg, Germany, 2017. [Google Scholar]
- Klepp, C.; Michel, S.; Protat, A.; Burdanowitz, J.; Albern, N.; Kähnert, M.; Dahl, A.; Louf, V.; Bakan, S.; Buehler, S.A. OceanRAIN, a new in-situ shipboard global ocean surface-reference dataset of all water cycle components. Sci. Data 2018, 5, 180122. [Google Scholar] [CrossRef] [PubMed]
- Roebeling, R.A.; Wolters, E.L.A.; Meirink, J.F.; Leijnse, H. Triple collocation of summer precipitation retrievals from SEVIRI over Europe with gridded rain gauge and weather radar data. J. Hydrometeorol. 2012, 13, 1552–1566. [Google Scholar] [CrossRef]
- McColl, K.A.; Vogelzang, J.; Konings, A.G.; Entekhabi, D.; Piles, M.; Stoffelen, A. Extended triple collocation: Estimating errors and correlation coefficients with respect to an unknown target. Geophys. Res. Lett. 2014, 41, 6229–6236. [Google Scholar] [CrossRef]
- Alemohammad, S.H.; McColl, K.A.; Konings, A.G.; Entekhabi, D.; Stoffelen, A. Characterization of precipitation product errors across the United States using multiplicative triple collocation. Hydrol. Earth Syst. Sci. 2015, 19, 3489–3503. [Google Scholar] [CrossRef]
- Stoffelen, A. Toward the true near-surface wind speed: Error modeling and calibration using triple collocation. J. Geophys. Res. Oceans 1998, 103, 7755–7766. [Google Scholar] [CrossRef]
- Gruber, A.; Su, C.-H.; Zwieback, S.; Crow, W.; Dorigo, W.; Wagner, W. Recent advances in (soil moisture) triple collocation analysis. Int. J. Appl. Earth Obs. Geoinf. 2016, 45, 200–211. [Google Scholar] [CrossRef]
- Chakraborty, A.; Kumar, R.; Stoffelen, A. Validation of ocean surface winds from the OCEANSAT-2 scatterometer using triple collocation. Remote Sens. Lett. 2013, 4, 84–93. [Google Scholar] [CrossRef]
- Dorigo, W.; Scipal, K.; Parinussa, R.M.; Liu, Y.Y.; Wagner, W.; De Jeu, R.A.; Naeimi, V. Error Characterisation of Global Active and Passive Microwave Soil Moisture Data Sets. Hydrol. Earth Syst. Sci. 2010, 14, 2605–2616. [Google Scholar] [CrossRef]
- Loew, A.; Schlenz, F. A dynamic approach for evaluating coarse scale satellite soil moisture products. Hydrol. Earth Syst. Sci. 2011, 15, 75–90. [Google Scholar] [CrossRef]
- Zwieback, S.; Scipal, K.; Dorigo, W.; Wagner, W. Structural and statistical properties of the collocation technique for error characterization. Nonlinear Process. Geophys. 2012, 19, 69–80. [Google Scholar] [CrossRef]
- Massari, C.; Crow, W.; Brocca, L. An assessment of the performance of global rainfall estimates without ground-based observations. Hydrol. Earth Syst. Sci. 2017, 21, 4347–4361. [Google Scholar] [CrossRef]
- Roebber, P.J. Visualizing multiple measures of forecast quality. Weather Forecast. 2009, 24, 601–608. [Google Scholar] [CrossRef]
- Taylor, K.E. Summarizing multiple aspects of model performance in a single diagram. J. Geophys. Res. Atmos. 2001, 106, 7183–7192. [Google Scholar] [CrossRef]
- Schaefer, J.T. The critical success index as an indicator of warning skill. Weather Forecast. 1990, 5, 570–575. [Google Scholar] [CrossRef]
- NASA GISS: Science Briefs: Cloud Climatology: Distribution and Character of Clouds. Available online: https://www.giss.nasa.gov/research/briefs/rossow_01/distrib.html (accessed on 16 November 2018).
- Adler, R.F.; Negri, A.J. A satellite infrared technique to estimate tropical convective and stratiform rainfall. J. Appl. Meteorol. 1988, 27, 30–51. [Google Scholar] [CrossRef]
- Sapiano, M.R.P.; Arkin, P.A. An intercomparison and validation of high-resolution satellite precipitation estimates with 3-hourly gauge data. J. Hydrometeorol. 2009, 10, 149–166. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Wolff, D.B.; Adler, R.F.; Gu, G.; Hong, Y.; Bowman, K.P.; Stocker, E.F. The TRMM multisatellite precipitation analysis (TMPA): Quasi-global, multiyear, combined-sensor precipitation estimates at fine scales. J. Hydrometeorol. 2007, 8, 38–55. [Google Scholar] [CrossRef]
- Kidd, C.; Huffman, G. Global precipitation measurement. Meteorol. Appl. 2011, 18, 334–353. [Google Scholar] [CrossRef]
- Khan, S.; Maggioni, V.; Kirstetter, P.-E. Investigating the Potential of Using Satellite-Based Precipitation Radars as Reference for Evaluating Multisatellite Merged Products. J. Geophys. Res. Atmos. 2018, 123, 8646–8660. [Google Scholar] [CrossRef]
- Kubota, T.; Shige, S.; Hashizume, H.; Aonashi, K.; Takahashi, N.; Seto, S.; Hirose, M.; Takayabu, Y.N.; Ushio, T.; Nakagawa, K. Global precipitation map using satellite-borne microwave radiometers by the GSMaP project: Production and validation. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2259–2275. [Google Scholar] [CrossRef]






| RV ID | Sample Size | # Cases with Rain > 0 mm·h−1 | Time Series |
|---|---|---|---|
| Sonne-II | 60,168 | 58,083 | Nov 2014–Jan 2015 |
| Roger | 10,763 | 8469 | Aug–Sep 2014 |
| Polastern | 445,635 | 233,349 | Mar 2014–Oct 2016 |
| Meteor | 20,299 | 19,358 | Mar 201–Mar 2016 |
| Maria | 27,083 | 23,954 | Mar–Jun 2014 |
| Investigator | 54,814 | 32,671 | Jan 2016–Feb 2017 |
| World | 4879 | 3860 | Jan–Feb 2017 |
| TOTAL | 623,641 | 379,744 | Mar 2014–Feb 2017 |
| Triplet ID | Products | RMSE (mm·h−1) 0.5°, 1°, 2°, 3° | R2 0.5°, 1°, 2°, 3° |
|---|---|---|---|
| A | early | 0.35, 0.30, 0.22, 0.21 | 0.50, 0.45, 0.67, 0.53 |
| 3DPRD | 1.05, 0.50, 0.40, 0.53 | 0.32, 0.37, 0.36, 0.19 | |
| OceanRAIN | 2.15, 1.61, 3.20, 2.88 | 0.07, 0.38, 0.05, 0.08 | |
| B | late | 0.33, 0.29, 0.22, 0.21 | 0.48, 0.43, 0.62, 0.50 |
| 3DPRD | 1.07, 0.49, 0.40, 0.53 | 0.27, 0.40, 0.38, 0.20 | |
| OceanRAIN | 2.14, 1.64, 3.18, 2.88 | 0.08, 0.35, 0.05, 0.08 | |
| C | final | 0.32, 0.28, 0.23, 0.20 | 0.50, 0.43, 0.61,0.51 |
| 3DPRD | 1.09, 0.49, 0.40, 0.52 | 0.26, 0.40, 0.37, 0.21 | |
| OceanRAIN | 2.12, 1.62, 3.22, 2.90 | 0.08, 0.35, 0.05, 0.07 | |
| D | MW | 0.36, 0.32, 0.24, 0.22 | 0.62, 0.47, 0.71, 0.53 |
| 3DPRD | 1.02, 0.49, 0.40, 0.53 | 0.37, 0.42, 0.37, 0.19 | |
| OceanRAIN | 2.21, 1.68, 3.32, 2.92 | 0.06, 0.33, 0.05, 0.08 | |
| E | IR | 0.59, 0.38, 0.29, 0.23 | 0.04, 0.31, 0.63, 0.48 |
| 3DPRD | 1.86, 0.61, 0.48, 0.61 | 0.01, 0.31, 0.31, 0.12 | |
| OceanRAIN | 2.62, 1.87, 3.84, 3.26 | 0.00, 0.37, 0.04, 0.09 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, S.; Maggioni, V. Assessment of Level-3 Gridded Global Precipitation Mission (GPM) Products Over Oceans. Remote Sens. 2019, 11, 255. https://doi.org/10.3390/rs11030255
Khan S, Maggioni V. Assessment of Level-3 Gridded Global Precipitation Mission (GPM) Products Over Oceans. Remote Sensing. 2019; 11(3):255. https://doi.org/10.3390/rs11030255
Chicago/Turabian StyleKhan, Sana, and Viviana Maggioni. 2019. "Assessment of Level-3 Gridded Global Precipitation Mission (GPM) Products Over Oceans" Remote Sensing 11, no. 3: 255. https://doi.org/10.3390/rs11030255
APA StyleKhan, S., & Maggioni, V. (2019). Assessment of Level-3 Gridded Global Precipitation Mission (GPM) Products Over Oceans. Remote Sensing, 11(3), 255. https://doi.org/10.3390/rs11030255