Reconstruction of Three-Dimensional Dynamic Wind-Turbine Wake Wind Fields with Volumetric Long-Range Wind Doppler LiDAR Measurements


Abstract
:
1. Introduction
2. Nacelle-Based LiDAR Dataset
2.1. Onshore LiDAR Measurement Campaign
2.2. Synthetic LiDAR Data
3. Method for Wind-Field Reconstruction
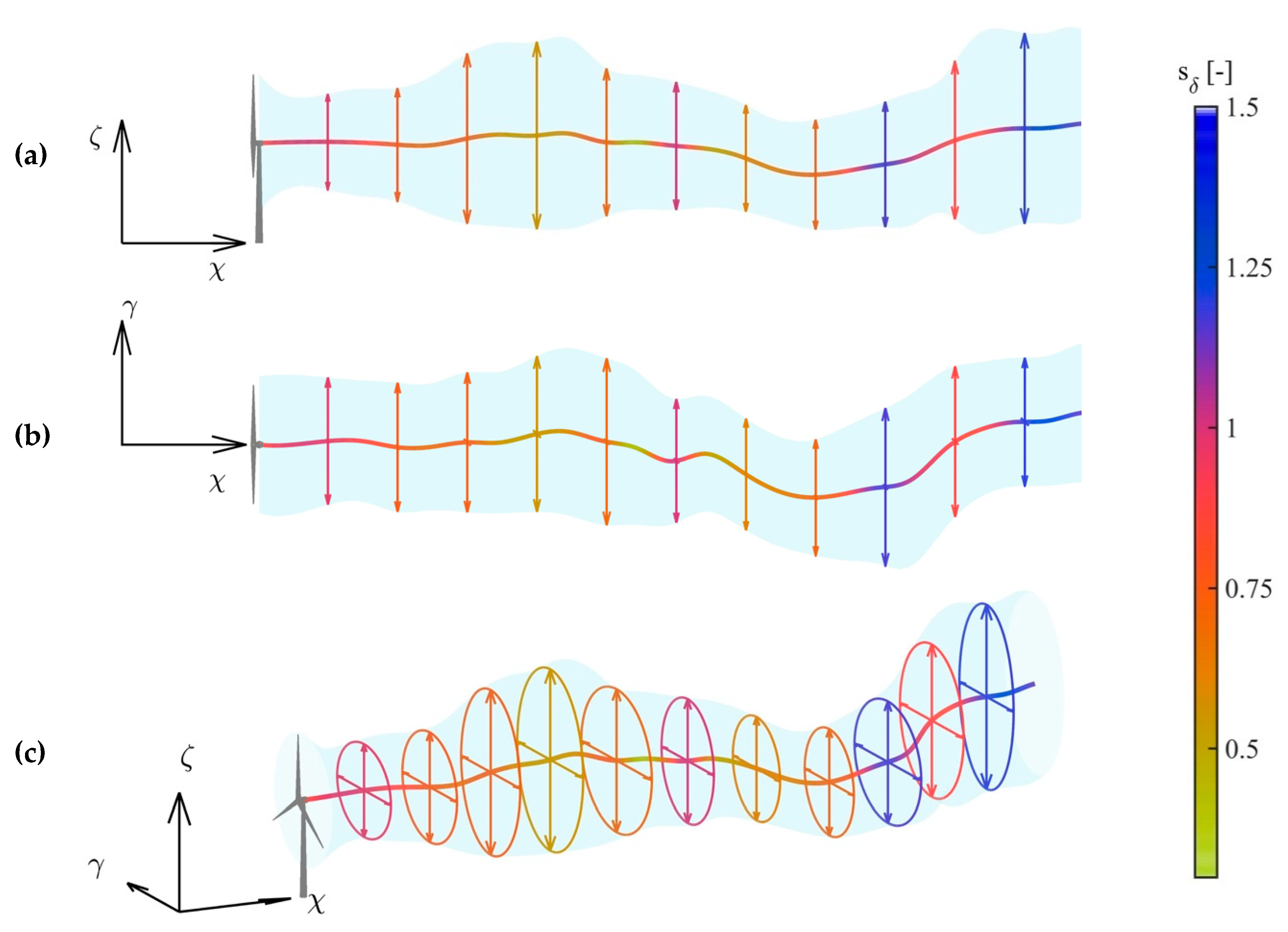
- If we consider a cross-section of a wake wind field in the plane at a certain downstream distance , the resulting flow behavior of the longitudinal wind speed component of the wake can be described as a superposition of the free flow with a planar (two-dimensional (2D)) longitudinal wind speed deficit, which shows specific transversal dynamics.
- We define these dynamics as temporal changes in the horizontal and vertical positions, the horizontal and vertical velocity deficit shapes, and the velocity deficit intensity, which represents the ratio of the tracked wake velocity at the wake center to the instantaneous ambient wind speed profile. These dynamics will be described below as the wake center position, wake width, and wake velocity intensity in 2D and later 3D.
- The wake velocity deficit causes a scaling of the ambient turbulence intensity, which depends on the 2D deficit shape at the downstream position . Other than the ambient turbulence intensity scaling, no additional turbulence is added as the meandering of the deficit shape induces turbulence.
- If we apply these considerations continuously in the downstream direction, we can consider the wake region a continuous symmetrical wake volume centered around a spline in space that alters depending on the previously described dynamics.
- The wake velocity deficit intensity is variable in time and space.
3.1. LiDAR Data Pre-Processing
3.2. Temporal Correction and Lidar Data Synchronization
3.3. Determination of Wake Deficit Dynamics
3.4. Calculation of the Volumetric Wind Speed Deficit
3.5. Calculation of the Volumetric Turbulence Intensity Scaling
3.6. Four-Dimensional Wake Wind-Field Reconstruction
4. Results
4.1. Determination of Wake Dynamics
4.2. Four-Dimensional Wake Wind-Field Reconstruction
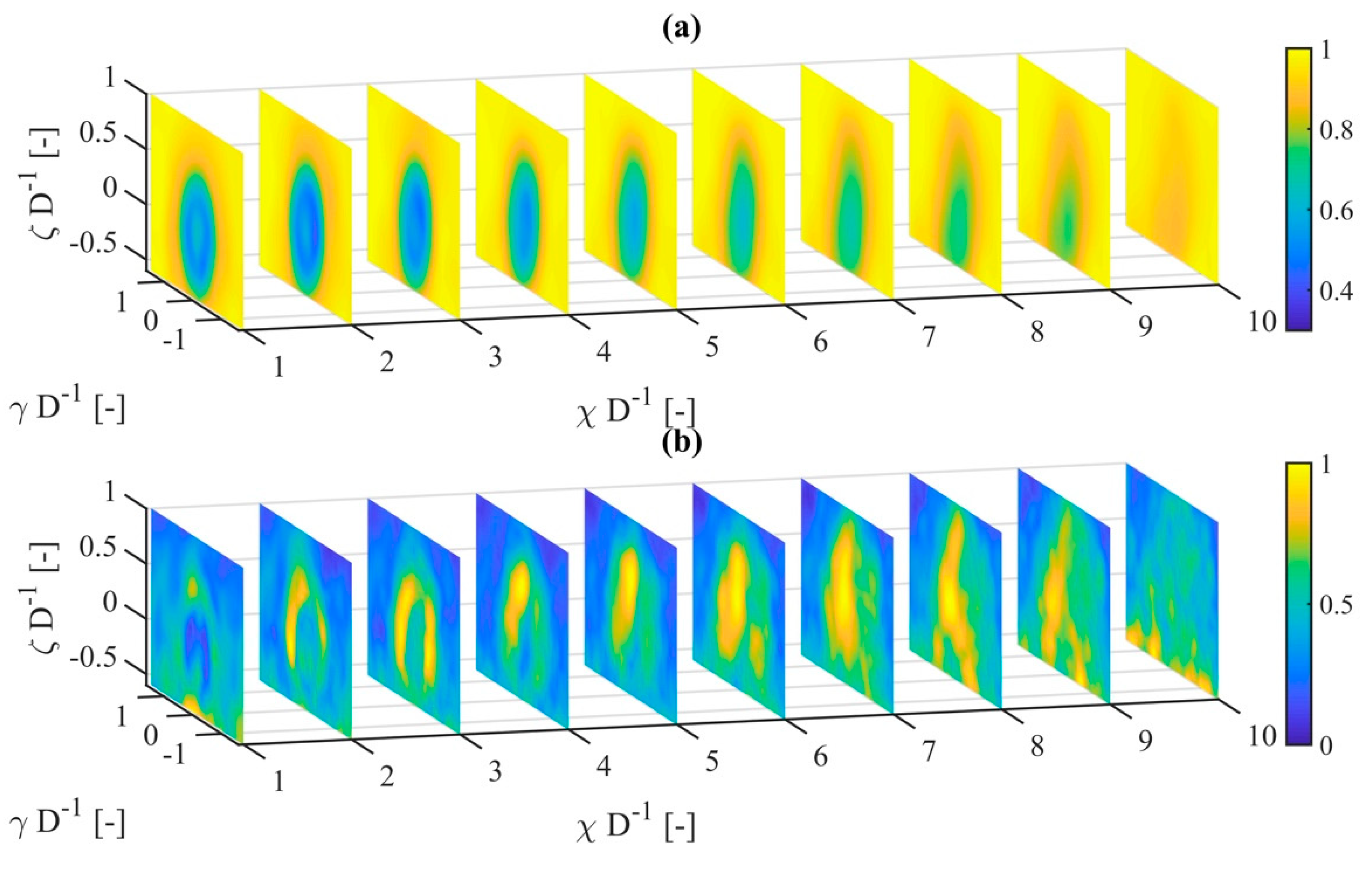
4.2.1. Steady Error Quantification
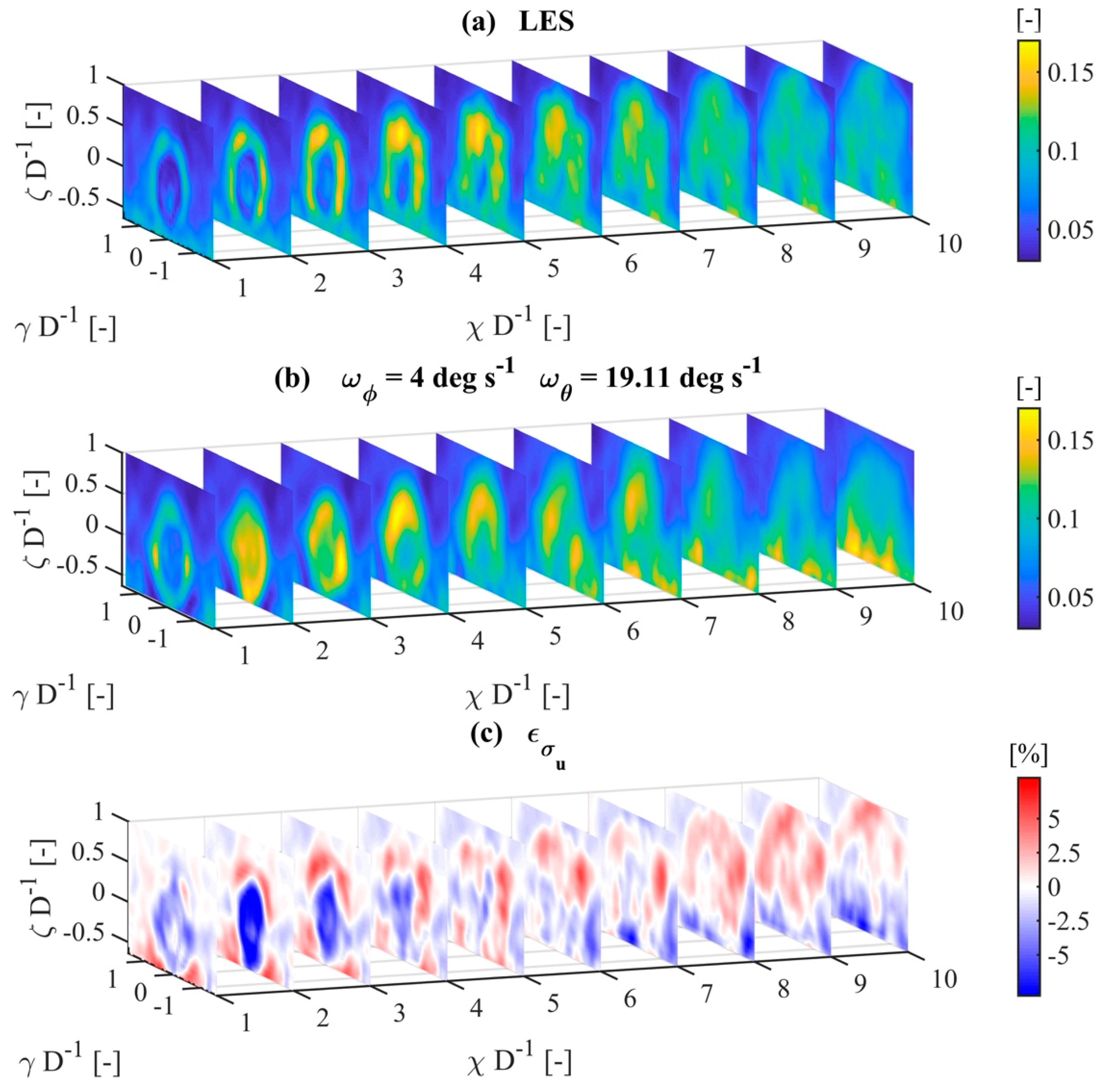
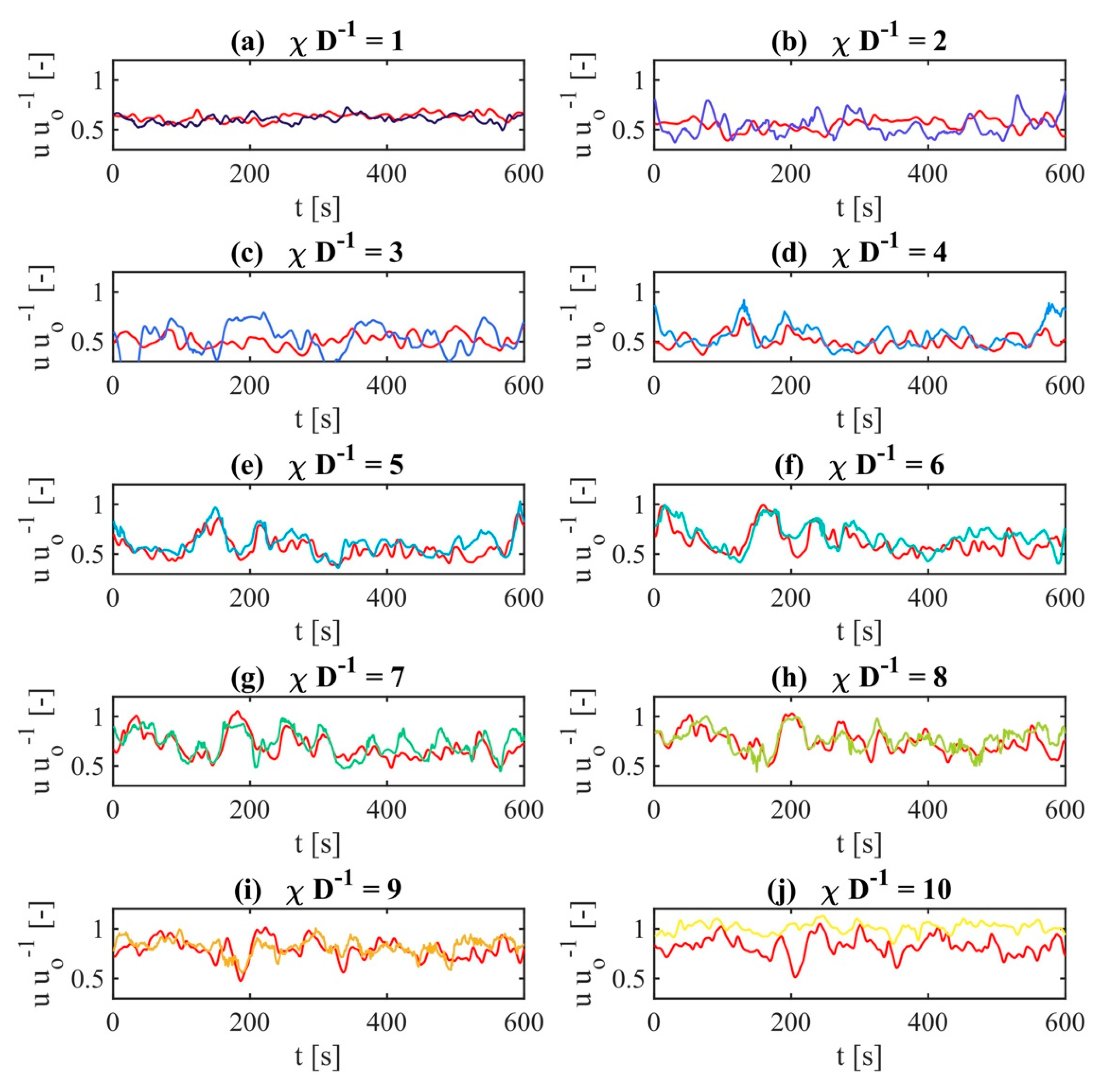
4.2.2. Dynamic Error Quantification
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ABL | Atmospheric boundary layer |
| ACL | Actuator line approach |
| ADE | Artificial data extension |
| CFD | Computational fluid dynamics |
| DTW | Dynamic time warping |
| DWM | Dynamic wake meandering |
| EDPm | Extended disk particle model |
| FFoR | Fixed frame of reference |
| LES | Large-eddy simulation |
| LiDAR | Light detection and ranging |
| LOS | Line-of-sight |
| MFoR | Meandering frame of reference |
| PALM | Parallelized large-eddy simulation model |
| PPI | Plan position indicator |
| RHI | Range height indicator |
| SCADA | Supervisory control and data acquisition |
| VD | Volumetric deficit |
Formula Symbols
| Wake deficit intensity within the Gaussian fitting | |
| Ambient longitudinal wind speed level within the Gaussian fitting | |
| , | Instantaneous wake velocity deficit in the fixed frame of reference |
| Averaged wake velocity deficit in the fixed frame of reference | |
| Instantaneous wake velocity deficit in the meandering frame of reference | |
| , | Averaged wake velocity deficit in the meandering frame of reference |
| , | Total opening angle of PPI and RHI scans |
| Mean wind speed reconstruction error | |
| Standard deviation reconstruction error | |
| Measurement time efficiency | |
| Elevation angle | |
| Difference angle of the vertical wind direction () and elevation angle () | |
| Vertical wind direction | |
| Measurement accumulation time | |
| Rotational weighting function | |
| Wake center position within the Gaussian fitting | |
| Radial LiDAR velocity | |
| Wake width within the Gaussian fitting | |
| Standard deviation of the wind speed in the wake in the meandering frame of reference | |
| Radial distance within the coordinate system | |
| Azimuth angle | |
| Horizontal wind direction | |
| Difference angle of the horizontal wind direction () and azimuth angle () | |
| Angular scan velocity | |
| Fixed reference frame coordinate system in the turbine ground point | |
| Meandering reference frame coordinate system | |
| Rotor diameter | |
| Measurement frequency | |
| Wind turbine hub height | |
| Ambient turbulence intensity in the fixed frame of reference | |
| Turbulence intensity in the meandering frame of reference | |
| Number of measurement points within a scan | |
| , | Number of angular measurements per scan |
| , | Number of scans per time interval |
| Radial position in transversal in-plane direction within the Gaussian fitting | |
| , | Angular resolution of PPI and RHI scans |
| Turbulence intensity scaling factor in the meandering frame of reference | |
| Horizontal spatial deficit shape scaling factor | |
| Horizontal spatial deficit shape scaling factor | |
| Velocity deficit intensity scaling factor | |
| t | Point in time |
| Reset time | |
| T | Set of all discrete measurement points in time |
| , | Scan duration |
| Instantaneous ambient longitudinal wind speed | |
| Average ambient longitudinal wind speed | |
| Instantaneous ambient longitudinal wind speed of synthetic wind field | |
| Average ambient longitudinal wind speed of synthetic wind field | |
| Gaussian-shaped wake wind speed profile within a PPI scan | |
| Gaussian-shaped wake wind speed profile within a PPI scan | |
| LES wind speed | |
| Averaged wind speed of wake in the meandering frame of reference | |
| PPI wind speed | |
| PPI wind speed | |
| RHI wind speed | |
| Instantaneous ambient longitudinal wind speed of reconstructed wind field | |
| Rotated and weighted wind speed combination of RHI and PPI in the MFoR | |
| Turbulent component of | |
| Average ambient lateral wind speed | |
| Average ambient vertical wind speed |
Appendix A
References
- Crespo, A.; Hernandez, J.; Frandsen, S. Survey of modelling methods for wind turbine wakes and wind farms. Wind Energy 1999, 2, 1–24. [Google Scholar] [CrossRef]
- Vermeer, L.; Sørensen, J.N.; Crespo, A. Wind turbine wake aerodynamics. Prog. Aerosp. Sci. 2003, 39, 467–510. [Google Scholar] [CrossRef]
- Kelley, N.D.; Osgood, R.M.; Bialasiewicz, J.T.; Jakubowski, A. Using wavelet analysis to assess turbulence/rotor interactions. Wind Energy 2000, 3, 121–134. [Google Scholar] [CrossRef]
- Hand, M. Mitigation of Wind Turbine/Vortex Interaction Using Disturbance Accommodating Control. Ph.D. Thesis, National Renewable Energy Laboratory, Golden, CO, USA, December 2003. [Google Scholar] [CrossRef]
- Ainslie, J.F. Calculating the flowfield in the wake of wind turbines. J. Wind Eng. Ind. Aerodyn. 1988, 27, 213–224. [Google Scholar] [CrossRef]
- Jensen, N.O. A Note on Wind Generator Interaction; Tech. Rep. Risø-M-2411(EN); Risø National Laboratory: Roskilde, Denmark, 1983. [Google Scholar]
- Frandsen, S.; Barthelmie, R.; Pryor, S.; Rathmann, O.; Larsen, S.; Højstrup, J.; Thøgersen, M. Analytical modelling of wind speed deficit in large offshore wind farms. Wind Energy 2006, 9, 39–53. [Google Scholar] [CrossRef]
- Trujillo, J.J. Large Scale Dynamics of Wind Turbine Wakes. Ph.D. Thesis, University of Oldenburg, Oldenburg, Germany, 2018. [Google Scholar]
- Larsen, G.C.; Madsen, H.A.; Thomsen, K.; Larsen, T.J. Wake meandering: A pragmatic approach. Wind Energy 2008, 11, 377–395. [Google Scholar] [CrossRef]
- Foti, D.; Yang, X.; Guala, M.; Sotiropoulos, F. Wake meandering statistics of a model wind turbine: Insights gained by large eddy simulations. Phys. Rev. Fluids 2016, 1, 4407. [Google Scholar] [CrossRef]
- Aitken, M.L.; Kosović, B.; Mirocha, J.D.; Lundquist, J.K. Large eddy simulation of wind turbine wake dynamics in the stable boundary layer using the Weather Research and Forecasting Model. J. Renew. Sustain. Energy 2014, 6, 5111. [Google Scholar] [CrossRef]
- Bromm, M.; Vollmer, L.; Kühn, M. Numerical investigation of wind turbine wake development in directionally sheared inflow. Wind Energy 2017, 20, 381–395. [Google Scholar] [CrossRef]
- Porté-Agel, F.; Wu, Y.-T.; Lu, H.; Conzemius, R.J. Large-eddy simulation of atmospheric boundary layer flow through wind turbines and wind farms. J. Wind Eng. Ind. Aerodyn. 2011, 99, 154–168. [Google Scholar] [CrossRef]
- Sturge, D.; Sobotta, D.; Howell, R.; While, A.; Lou, J. A hybrid actuator disc–Full rotor CFD methodology for modelling the effects of wind turbine wake interactions on performance. Renew. Energy 2015, 80, 525–537. [Google Scholar] [CrossRef]
- Vijayakumar, G.; Brasseur, J.; Lavely, A.W.; Jayaraman, B.; Craven, B. In Interaction of atmospheric turbulence with blade boundary layer dynamics on a 5MW wind turbine using blade-boundary-layer-resolved CFD with hybrid URANS-LES. In Proceedings of the 34th Wind Energy Symp, San Diego, CA, USA, 4–8 January 2016; p. 0521. [Google Scholar] [CrossRef]
- Schmidt, B.; King, J.; Larsen, G.C.; Larsen, T.J. Load validation and comparison versus certification approaches of the risø dynamic wake meandering model implementation in GH bladed. In Proceedings of the EWEA Annual Event 2011, Brussels, Belgium, 14–17 March 2011; pp. 249–254. [Google Scholar]
- Larsen, G.C.; Ott, S.; Larsen, T.J.; Hansen, K.; Chougule, A. In Improved Modelling of Fatigue Loads in Wind Farms under Non-Neutral ABL Stability Conditions; (Journal of Physics: Conference Series); IOP Publishing: Bristol, UK, 2018; p. 072013. [Google Scholar] [CrossRef]
- Käsler, Y.; Rahm, S.; Simmet, R.; Kühn, M. Wake measurements of a multi-MW wind turbine with coherent long-range pulsed Doppler wind lidar. J. Atmos. Ocean. Technol. 2010, 27, 1529–1532. [Google Scholar] [CrossRef]
- Aitken, M.L.; Lundquist, J.K. Utility-scale wind turbine wake characterization using nacelle-based long-range scanning lidar. J. Atmos. Ocean. Technol. 2014, 31, 1529–1539. [Google Scholar] [CrossRef]
- Bromm, M.; Rott, A.; Beck, H.; Vollmer, L.; Steinfeld, G.; Kühn, M. Field investigation on the influence of yaw misalignment on the propagation of wind turbine wakes. Wind Energy 2018, 21, 1011–1028. [Google Scholar] [CrossRef]
- Aubrun, S.; Garcia, E.T.; Boquet, M.; Coupiac, O.; Girard, N. In Statistical Analysis of A Field Database to Study Stability Effects on Wind Turbine Wake Properties; (Journal of Physics: Conference Series); IOP Publishing: Bristol, UK, 2018; p. 072047. [Google Scholar] [CrossRef]
- Beck, H.; Kühn, M. Temporal up-sampling of planar long-range doppler LiDAR wind speed measurements using space-time conversion. Remote Sens. 2019, 11, 867. [Google Scholar] [CrossRef]
- Carbajo Fuertes, F.; Porté-Agel, F. Using a virtual Lidar approach to assess the accuracy of the volumetric reconstruction of a wind turbine wake. Remote Sens. 2018, 10, 721. [Google Scholar] [CrossRef]
- Borraccino, A.; Schlipf, D.; Haizmann, F.; Wagner, R. Wind field reconstruction from nacelle-mounted lidars short range measurements. Wind Energy Sci. 2017, 2, 269–283. [Google Scholar] [CrossRef]
- Kapp, S.; Kühn, M. In A Five-Parameter Wind Field Estimation Method Based on Spherical Upwind Lidar Measurements; (Journal of Physics: Conference Series); IOP Publishing: Bristol, UK, 2014; p. 012112. [Google Scholar] [CrossRef]
- Towers, P.; Jones, B.L. Real-time wind field reconstruction from LiDAR measurements using a dynamic wind model and state estimation. Wind Energy 2016, 19, 133–150. [Google Scholar] [CrossRef]
- Iungo, G.V.; Porté-Agel, F. Volumetric lidar scanning of wind turbine wakes under convective and neutral atmospheric stability regimes. J. Atmos. Ocean. Technol. 2014, 31, 2035–2048. [Google Scholar] [CrossRef]
- Van Dooren, M.; Trabucchi, D.; Kühn, M. A methodology for the reconstruction of 2D horizontal wind fields of wind turbine wakes based on dual-Doppler lidar measurements. Remote Sens. 2016, 8, 809. [Google Scholar] [CrossRef]
- Raasch, S.; Schröter, M. PALM–A large-eddy simulation model performing on massively parallel computers. Meteorol. Z. 2001, 10, 363–372. [Google Scholar] [CrossRef]
- Troldborg, N. Actuator Line Modeling of Wind Turbine Wakes. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, June 2008. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009.
- Deardorff, J. Stratocumulus-capped mixed layers derived from a three-dimensional model. Bound. -Layer Meteorol. 1980, 18, 495–527. [Google Scholar] [CrossRef]
- Trabucchi, D.; Trujillo, J.; Steinfeld, G.; Schneemann, J.; Machtaa, M.; Cariou, J.; Kühn, M. In Numerical Assessment of Performance of Lidar Wind Scanners for Wake Measurements; EWEA Annual Event 2011, European Wind Energy Association (EWEA): Brussels, Belgium, 2011. [Google Scholar]
- Sibson, R. A brief description of natural neighbour interpolation. In Interpreting Multivariate Data; Wiley: New York, NY, USA, 1981; pp. 21–36. [Google Scholar] [CrossRef]
- Trujillo, J.J.; Bingöl, F.; Larsen, G.C.; Mann, J.; Kühn, M. Light detection and ranging measurements of wake dynamics. Part II: Two-dimensional scanning. Wind Energy 2011, 14, 61–75. [Google Scholar] [CrossRef]
- Brent, R.P. Algorithms for Minimization without Derivatives; Courier Corporation: North Chelmsford, MA, USA, 1973; pp. 61–167. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1°/s | 40° | 15 | 36,000 | 200 | 0.2° | 40.0 s | 0.024 Hz | 97.2% |
| 2°/s | 40° | 29 | 18,000 | 100 | 0.4° | 20.0 s | 0.047 Hz | 94.2% |
| 4°/s | 40° | 54 | 9000 | 50 | 0.8° | 10.0 s | 0.089 Hz | 89.2% |
| 8°/s | 40° | 97 | 4500 | 25 | 1.6° | 5.0 s | 0.161 Hz | 80.6% |
| 12°/s | 40° | 133 | 2880 | 16 | 2.5° | 3.3 s | 0.221 Hz | 73.4% |
| 19.11°/s | 40° | 183 | 1800 | 10 | 4.0° | 2.1 s | 0.303 Hz | 63.4% |
| 26.22°/s | 40° | 221 | 1260 | 7 | 5.7° | 1.5 s | 0.370 Hz | 55.8% |
| 33.33°/s | 40° | 250 | 1080 | 6 | 6.7° | 1.2 s | 0.417 Hz | 50.0% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beck, H.; Kühn, M. Reconstruction of Three-Dimensional Dynamic Wind-Turbine Wake Wind Fields with Volumetric Long-Range Wind Doppler LiDAR Measurements. Remote Sens. 2019, 11, 2665. https://doi.org/10.3390/rs11222665
Beck H, Kühn M. Reconstruction of Three-Dimensional Dynamic Wind-Turbine Wake Wind Fields with Volumetric Long-Range Wind Doppler LiDAR Measurements. Remote Sensing. 2019; 11(22):2665. https://doi.org/10.3390/rs11222665
Chicago/Turabian StyleBeck, Hauke, and Martin Kühn. 2019. "Reconstruction of Three-Dimensional Dynamic Wind-Turbine Wake Wind Fields with Volumetric Long-Range Wind Doppler LiDAR Measurements" Remote Sensing 11, no. 22: 2665. https://doi.org/10.3390/rs11222665
APA StyleBeck, H., & Kühn, M. (2019). Reconstruction of Three-Dimensional Dynamic Wind-Turbine Wake Wind Fields with Volumetric Long-Range Wind Doppler LiDAR Measurements. Remote Sensing, 11(22), 2665. https://doi.org/10.3390/rs11222665