A Rapidly Assessed Wetland Stress Index (RAWSI) Using Landsat 8 and Sentinel-1 Radar Data



Abstract
1. Introduction
- Which classification method, between RF and SVM, provides the highest mapping accuracy for Delaware wetlands?
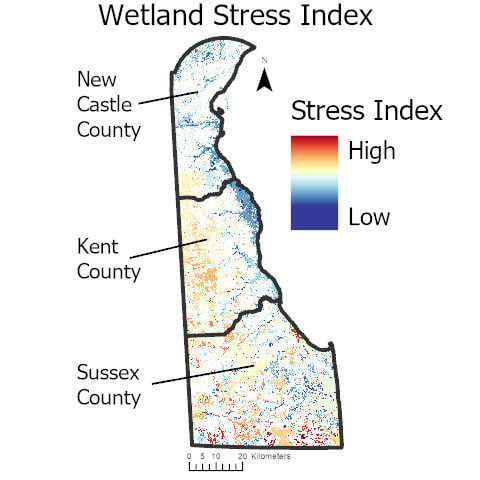
- How does wetland stress vary across Delaware, both spatially and by wetland type?
2. Materials and Methods
2.1. Study Area
2.2. Land-Cover Classification
2.2.1. Satellite Data
2.2.2. Classification Method
2.2.3. Land-Cover Types
2.2.4. Reference Data
2.2.5. Post-Processing
2.2.6. Accuracy Assessment
2.3. Natural-Vegetation Change Detection
2.4. Stream Channelization
2.5. Rapidly Assessed Wetland Stress Index (RAWSI)
2.6. Spatial Patterns in RAWSI
3. Results
3.1. Spatial Distribution of Land Covers within Delaware
3.2. Rapidly Assessed Wetland Stress Index (RAWSI)
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Environmental Protection Agency. What Is a Wetland? Environmental Protection Agency: Washington, DC, USA, 2018.
- Cowardin, L.M. Classification of Wetlands and Deepwater Habitats of the United States; Fish and Wildlife Service: Washington, DC, USA, 1979.
- Kennedy, V.; Greeson, P.E.; Clark, J.R.; Clark, J.E. Wetland Functions and Values: The State of Our Understanding. Estuaries 1981, 4, 388. [Google Scholar] [CrossRef]
- Clarkson, B.R.; Ausseil, A.-G.E.; Gerbeaux, P. Wetland Ecosystem Services; Manaaki Whenua Press: Lincoln, New Zealand, 2014. [Google Scholar]
- Dise, N.B. Peatland response to global change. Science 2009, 326, 810–811. [Google Scholar] [CrossRef] [PubMed]
- Motts, W.; Heeley, R. A Guide to Important Characteristics and Values of Freshwater Wetlands in the Northeast. Water Resour. Res. Cent. 1973, 31, 5–8. [Google Scholar]
- Odum, E. The Role of the Tidal Marshes in Estuarine Production; Conservationist: New York, NY, USA, 1961. [Google Scholar]
- Brander, L.; Schuyt, K. Benefits Transfer: The Economic Value of World’s Wetlands; The Economics of Ecosystems Biodiversity: Geneva, Switzerland, 2004. [Google Scholar]
- Tiner, R.W. Wetlands of the United States: Current Status and Recent Trends; Fish and Wildlife Service: Washington, DC, USA, 1984.
- Winter, T.; Carr, M. Hydrologic Setting of Wetlands in the Cottonwood Lake Area, Stutsman County, North Dakota; US Geological Survey: Reston, VA, USA, 1980. [CrossRef]
- Costanza, R.; D’Arge, R.; De Groot, R.; Farber, S.; Grasso, M.; Hannon, B.; Limburg, K.; Naeem, S.; O’Neill, R.V.; Paruelo, J.; et al. The value of the world’s ecosystem services and natural capital. Nature 1997, 387, 253–260. [Google Scholar] [CrossRef]
- Mitsch, W.J.; Bernal, B.; Nahlik, A.M.; Mander, Ü.; Zhang, L.; Anderson, C.J.; Jørgensen, S.E.; Brix, H. Wetlands, carbon, and climate change. Landsc. Ecol. 2013, 28, 583–597. [Google Scholar] [CrossRef]
- Davidson, N.C. How much wetland has the world lost? Long-term and recent trends in global wetland area. Mar. Freshw. Res. 2014, 65, 934–941. [Google Scholar] [CrossRef]
- Winkler, M.G.; Dewitt, C.B. Environmental Impacts of Peat Mining in the United States: Documentation for Wetland Conservation. Environ. Conserv. 1985, 12, 317–330. [Google Scholar] [CrossRef]
- Zedler, J.B.; Kercher, S. WETLAND RESOURCES: Status, Trends, Ecosystem Services, and Restorability. Annu. Rev. Environ. Resour. 2005, 30, 39–74. [Google Scholar] [CrossRef]
- Tiner, R.; Biddle, M.; Jacobs, A.; Rogerson, A.; MucGukin, K. Delaware Wetlands: Status and Changes from 1992 to 2007; US Fish and Wildlife Service: Washington, DC, USA, 2011.
- Tiner, R. Wetlands of Delaware; US Fish and Wildlife Service: Washington, DC, USA, 1985.
- Sifneos, J.C.; Herlihy, A.T.; Jacobs, A.D.; Kentula, M.E. Calibration of the Delaware Rapid Assessment Protocol to a comprehensive measure of wetland condition. Wetlands 2010, 30, 1011–1022. [Google Scholar] [CrossRef]
- Jacobs, A. Delaware Rapid Assessment Procedure Version 6.0 User’s Manual and Data Sheets; Delaware Department of Natural Resources and Environmental Control: Dover, DE, USA, 2010.
- Fennessy, M.; Jacobs, A.; Kentula, M. Review of Rapid Methods for Assessing Wetland Condition; US Environmental Protection Agency: Washington, DC, USA, 2004.
- Adam, E.; Mutanga, O.; Rugege, D. Multispectral and hyperspectral remote sensing for identification and mapping of wetland vegetation: A review. Wetl. Ecol. Manag. 2010, 18, 281–296. [Google Scholar] [CrossRef]
- Guo, M.; Li, J.; Sheng, C.; Xu, J.; Wu, L. A review of wetland remote sensing. Sensors 2017, 17, 777. [Google Scholar] [CrossRef] [PubMed]
- Ozesmi, S.L.; Bauer, M.E. Satellite remote sensing of wetlands. Wetl. Ecol. Manag. 2002, 10, 381–402. [Google Scholar] [CrossRef]
- Tiner, R. Early Applications of Remote Sensing for Mapping Wetlands. In Remote Sensing of Wetlands: Applications and Advances; CRC Press: Boca Raton, FL, USA, 2015; pp. 67–78. [Google Scholar] [CrossRef]
- Zomer, R.J.; Trabucco, A.; Ustin, S.L. Building spectral libraries for wetlands land cover classification and hyperspectral remote sensing. J. Environ. Manag. 2009, 90, 2170–2177. [Google Scholar] [CrossRef] [PubMed]
- Gibbs, J.P. Wetland Loss and Biodiversity Conservation. Conserv. Biol. 2000, 14, 314–317. [Google Scholar] [CrossRef]
- Delaware Firstmap 2019. Delaware 2007 Land Use, Land Cover. Available online: https://regional-delaware.opendata.arcgis.com/datasets/delaware-2007-land-use-land-cover (accessed on 20 August 2019).
- Gilbertson, J.K.; Kemp, J.; van Niekerk, A. Effect of pan-sharpening multi-temporal Landsat 8 imagery for crop type differentiation using different classification techniques. Comput. Electron. Agric. 2017, 134, 151–159. [Google Scholar] [CrossRef]
- Giri, C.; Pengra, B.; Long, J.; Loveland, T.R. Next generation of global land cover characterization, mapping, and monitoring. Int. J. Appl. Earth Obs. Geoinf. 2013, 25, 30–37. [Google Scholar] [CrossRef]
- Jia, K.; Wei, X.; Gu, X.; Yao, Y.; Xie, X.; Li, B. Land cover classification using Landsat 8 Operational Land Imager data in Beijing, China. Geocarto Int. 2014, 29, 941–951. [Google Scholar] [CrossRef]
- Peña, M.A.; Brenning, A. Assessing fruit-tree crop classification from Landsat-8 time series for the Maipo Valley, Chile. Remote Sens. Environ. 2015, 171, 234–244. [Google Scholar] [CrossRef]
- Schultz, B.; Immitzer, M.; Formaggio, A.R.; Sanches, I.D.A.; Luiz, A.J.B.; Atzberger, C. Self-Guided segmentation and classification of multi-temporal Landsat 8 images for crop type mapping in Southeastern Brazil. Remote Sens. 2015, 7, 14482–14508. [Google Scholar] [CrossRef]
- Banks, S.; White, L.; Behnamian, A.; Chen, Z.; Montpetit, B.; Brisco, B.; Pasher, J.; Duffe, J. Wetland Classification with Multi-Angle/Temporal SAR Using Random Forests. Remote Sens. 2019, 11, 670. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.; Endres, S.; Battaglia, M.; Miller, M.E.; Banda, E.; Laubach, Z.; Higman, P.; Chow-Fraser, P.; Marcaccio, J. Development of a Bi-National Great Lakes Coastal Wetland and Land Use Map Using Three-Season PALSAR and Landsat Imagery. Remote Sens. 2015, 7, 8655–8682. [Google Scholar] [CrossRef]
- Dehouck, A.; Lafon, V.; Baghdadi, N.; Marieu, V. Use of optical and radar data in synergy for mapping intertidal flats and coastal salt-marshes (Arcachon lagoon, France). In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 2853–2856. [Google Scholar] [CrossRef]
- Henderson, F.; Chasan, R.; Portolese, J.; Hart, T. Evaluation of SAR-Optical Imagery Synthesis Techniques in a Complex Coastal Ecosystem. Photogramm. Eng. Remote Sens. 2002, 68, 839–846. [Google Scholar]
- Leckie, D.G. Synergism of synthetic aperture radar and visible/infrared data for forest type discrimination. Photogramm. Eng. Remote Sens. 1990, 56, 1237–1246. [Google Scholar]
- Nsaibi, M.; Chaabane, F. Image fusion of radar and optical remote sensing data for land cover classification. In Proceedings of the 2008 3rd International Conference on Information and Communication Technologies: From Theory to Applications, ICTTA,, Damascus, Syria, 7–11 April 2008. [Google Scholar] [CrossRef]
- Ramsey III, E.W.I.; Nelson, G.A.; Sapkota, S.K. Classifying coastal resources by integrating optical and radar imagery and color infrared photography. Mangroves Salt Marshes 1998, 2, 109–119. [Google Scholar] [CrossRef]
- Ramsey III, E.; Rangoowala, A.; Tiner, R.; Klemas, V.; Lang, M. Radar and Optical Image Fusion and Mapping of Wetland Resources. In Remote Sensing of Wetlands: Applications and Advances; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Salehi, B.; Mahdianpari, M.; Amani, M.; Manesh, F.; Granger, J.; Mahdavi, S.; Brisco, B. A Collection of Novel Algorithms for Wetland Classification with SAR and Optical Data. In Wetlands Management Assessing Risk and Sustainable Solutions; IntechOpen: Rijeka, Croatia, 2018. [Google Scholar] [CrossRef]
- Touzi, R.; Deschamps, A.; Rother, G. Wetland characterization using polarimetric RADARSAT-2 capability. Can. J. Remote Sens. 2007, 33, S56–S67. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, F.; Tian, B.; Liang, D. Multi-temporal SAR image classification of coastal plain wetlands using a new feature selection method and random forests. Remote Sens. Lett. 2019, 10, 312–321. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-Scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Shelestov, A.; Lavreniuk, M.; Kussul, N.; Novikov, A.; Skakun, S. Exploring Google earth engine platform for big data processing: Classification of multi-temporal satellite imagery for crop mapping. Front. Earth Sci. 2017, 5, 1–10. [Google Scholar] [CrossRef]
- Chander, G.; Markham, B.L.; Helder, D.L. Summary of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ. 2009, 113, 893–903. [Google Scholar] [CrossRef]
- Azzari, G.; Lobell, D.B. Landsat-Based classification in the cloud: An opportunity for a paradigm shift in land cover monitoring. Remote Sens. Environ. 2017, 202, 64–74. [Google Scholar] [CrossRef]
- Hird, J.N.; DeLancey, E.R.; McDermid, G.J.; Kariyeva, J. Google earth engine, open-access satellite data, and machine learning in support of large-area probabilistic wetland mapping. Remote Sens. 2017, 9, 1315. [Google Scholar] [CrossRef]
- Huang, H.; Chen, Y.; Clinton, N.; Wang, J.; Wang, X.; Liu, C.; Gong, P.; Yang, J.; Bai, Y.; Zheng, Y.; et al. Mapping major land cover dynamics in Beijing using all Landsat images in Google Earth Engine. Remote Sens. Environ. 2017, 202, 166–176. [Google Scholar] [CrossRef]
- Mateo-García, G.; Gómez-Chova, L.; Amorós-López, J.; Muñoz-Marí, J.; Camps-Valls, G. Multitemporal cloud masking in the Google Earth Engine. Remote Sens. 2018, 10, 1079. [Google Scholar] [CrossRef]
- Miettinen, J.; Shi, C.; Liew, S.C. Land cover distribution in the peatlands of Peninsular Malaysia, Sumatra and Borneo in 2015 with changes since 1990. Glob. Ecol. Conserv. 2016, 6, 67–78. [Google Scholar] [CrossRef]
- Mondal, P.; Trzaska, S.; De Sherbinin, A. Landsat-Derived estimates of mangrove extents in the Sierra Leone coastal landscape complex during 1990–2016. Sensors 2018, 18, 12. [Google Scholar] [CrossRef] [PubMed]
- Patela, N.N.; Angiuli, E.; Gamba, P.; Gaughan, A.; Lisini, G.; Stevens, F.R.; Tatem, A.J.; Trianni, G. Multitemporal settlement and population mapping from landsatusing google earth engine. Int. J. Appl. Earth Obs. Geoinf. 2015, 35, 199–208. [Google Scholar] [CrossRef]
- Wingate, V.R.; Phinn, S.R.; Kuhn, N.; Bloemertz, L.; Dhanjal-Adams, K.L. Mapping decadal land cover changes in the woodlands of North Eastern Namibia from 1975 to 2014 using the landsat satellite archived data. Remote Sens. 2016, 8, 681. [Google Scholar] [CrossRef]
- Xiong, J.; Thenkabail, P.S.; Tilton, J.C.; Gumma, M.K.; Teluguntla, P.; Oliphant, A.; Congalton, R.G.; Yadav, K.; Gorelick, N. Nominal 30-m cropland extent map of continental Africa by integrating pixel-based and object-based algorithms using Sentinel-2 and Landsat-8 data on google earth engine. Remote Sens. 2017, 9, 1065. [Google Scholar] [CrossRef]
- ESA. Sentinel-1-SAR Technical Guide. Available online: https://sentinel.esa.int/web/sentinel/sentinel-technical-guides (accessed on 15 March 2019).
- ESA. Sentinel-1: ESA’s Radar Observatory Mission for GMES Operational Services; European Space Agency: Paris, France, 2012. [Google Scholar]
- White, L.; Brisco, B.; Dabboor, M.; Schmitt, A.; Pratt, A. A collection of SAR methodologies for monitoring wetlands. Remote Sens. 2015, 7, 7615–7645. [Google Scholar] [CrossRef]
- Cutler, D.R.; Edwards, T.C.; Beard, K.H.; Cutler, A.; Hess, K.T.; Gibson, J.; Lawler, J.J. Random forests for classification in ecology. Ecology 2007, 88, 2783–2792. [Google Scholar] [CrossRef]
- Prasad, A.M.; Iverson, L.R.; Liaw, A. Newer classification and regression tree techniques: Bagging and random forests for ecological prediction. Ecosystems 2006, 9, 181–199. [Google Scholar] [CrossRef]
- Szuster, B.W.; Chen, Q.; Borger, M. A comparison of classification techniques to support land cover and land use analysis in tropical coastal zones. Appl. Geogr. 2011, 31, 525–532. [Google Scholar] [CrossRef]
- Abe, B.T.; Olugbara, O.O.; Marwala, T. Experimental comparison of support vector machines with random forests for hyperspectral image land cover classification. J. Earth Syst. Sci. 2014, 123, 779–790. [Google Scholar] [CrossRef]
- Noi, P.T.; Kappas, M. Comparison of random forest, k-nearest neighbor, and support vector machine classifiers for land cover classification using sentinel-2 imagery. Sensors 2018, 18, 18. [Google Scholar] [CrossRef]
- Raczko, E.; Zagajewski, B. Comparison of support vector machine, random forest and neural network classifiers for tree species classification on airborne hyperspectral APEX images. Eur. J. Remote Sens. 2017, 50, 144–154. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S.; et al. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2012, 34, 2607–2654. [Google Scholar] [CrossRef]
- Huang, G.; Hongming, Z.; Xiaojian, D.; Rui, Z. Extreme Learning Machine for Regression and Multiclass Classification. Ieee Trans. Syst. Mancybern. Part B (Cybern.) 2011, 42, 513–529. [Google Scholar] [CrossRef]
- Tony, Y. Understanding Random Forest. Available online: https://towardsdatascience.com/understanding-random-forest-58381e0602d2 (accessed on 1 August 2019).
- Kulkarni, V.Y.; Sinha, P.K. Pruning of random forest classifiers: A survey and future directions. In Proceedings of the 2012 International Conference on Data Science and Engineering, ICDSE, Cochin, Kerala, India, 18–20 July 2012; pp. 64–68. [Google Scholar] [CrossRef]
- Suykens, J.A.K.; Vandewalle, J. Least squares support vector machine classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Kuemmerle, T.; Radeloff, V.C.; Perzanowski, K.; Hostert, P. Cross-Border comparison of land cover and landscape pattern in Eastern Europe using a hybrid classification technique. Remote Sens. Environ. 2006, 103, 449–464. [Google Scholar] [CrossRef]
- Liu, W.; Gopal, S.; Woodcock, C.E. Uncertainty and confidence in land cover classification using a hybrid classifier approach. Photogramm. Eng. Remote Sens. 2004, 70, 963–971. [Google Scholar] [CrossRef]
- Rozenstein, O.; Karnieli, A. Comparison of methods for land-use classification incorporating remote sensing and GIS inputs. Appl. Geogr. 2011, 31, 533–544. [Google Scholar] [CrossRef]
- Oshiro, T.M.; Perez, P.S.; Baranauskas, J.A. How many trees in a random forest? In Proceedings of the International Conference on Machine Learning and Data Mining in Pattern Recognition, Berlin, Germany, 13–20 July 2012. [Google Scholar] [CrossRef]
- Anderson, J.R.; Hardy, E.E.; Roach, J.T.; Witmer, R.E. A Land Use and Land Cover Classification System for Use with Remote Sensor Data; US Geological Survey: Reston, VA, USA, 1976.
- Lillesand, T.; Kiefer, R.; Chipman, J. Remote Sensing and Image Interpretation. In Remote Sensing and Image Interpretation; John Wiley & Sons: Hoboken, NJ, USA, 2004; pp. 568–570. [Google Scholar]
- Castelle, A.J.; Johnson, A.W.; Conolly, C. Wetland and Stream Buffer Size Requirements—A Review. J. Environ. Qual. 1994, 23, 878–882. [Google Scholar] [CrossRef]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Frank, E.; Hall, M.A.; Witten, I.H.; Kaufmann, M. WEKA Workbench Online Appendix for “Data Mining: Practical Machine Learning Tools and Techniques.”; Morgan Kaufmann: Burlington, MA, USA, 2016. [Google Scholar]
- Pelleg, D.; Pelleg, D.; Moore, A. X-Means: Extending K-Means with Efficient Estimation of the Number of Clusters. In Proceedings of the 17th International Conference on Machine Learning, Stanford, CA, USA, 29 June–2 July 2000; pp. 727–734. [Google Scholar]
- Gandhi, G.M.; Parthiban, S.; Thummalu, N.; Christy, A. Ndvi: Vegetation Change Detection Using Remote Sensing and Gis—A Case Study of Vellore District. Procedia Comput. Sci. 2015, 57, 1199–1210. [Google Scholar] [CrossRef]
- Zhang, C.; Smith, M.; Lv, J.; Fang, C. Applying time series Landsat data for vegetation change analysis in the Florida Everglades Water Conservation Area 2A during 1996–2016. Int. J. Appl. Earth Obs. Geoinf. 2017, 57, 214–223. [Google Scholar] [CrossRef]
- Simley, J. Applying the National Hydrography Dataset. J. Am. Water Resour. Assoc. 2008, 10, 5–8. [Google Scholar]
- Savery, T.S.; Belt, G.H.; Higgins, D.A. Evaluation of the Rosgen Stream Classification System in Chequamegon-Nicolet National Forest, Wisconsin. J. Am. Water Resour. Assoc. 2001, 37, 641–654. [Google Scholar] [CrossRef]
- Rosgen, D.L. A classification of natural rivers. Catena 1994, 22, 169–199. [Google Scholar] [CrossRef]
- Mueller, J.E. An introduction to the hydraulic and topographic sinuosity indexes. Ann. Assoc. Am. Geogr. 1968, 58, 371–385. [Google Scholar] [CrossRef]
- Goodchild, M. Spatial Autocorrelation; Geo Books: Norwich, UK, 1986. [Google Scholar]
- Getis, A.; Ord, J.K. The Analysis of Spatial Association. Geogr. Anal. 1992, 24, 189–206. [Google Scholar] [CrossRef]
- Guiteras, S. Prime Hook NWR Marsh Restoration—Early Evidence of Success. Available online: https://wmap.blogs.delaware.gov/2017/12/11/prime-hook-nwr-marsh-restoration-early-evidence-of-success/ (accessed on 20 August 2019).
- Delaware Department of Natural Resources and Environmental Control. What is Regulated and Where is It Regulated? Delaware Department of Natural Resources and Environmental Control: Dover, DE, USA, 2019.
- Environmental Law Institute. Delaware Wetland Program. Review; Environmental Law Institute: Washington, DC, USA, 2010. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Land Cover | Description | Number of Reference Points |
|---|---|---|
| Built | Land developed with impervious surfaces, such as roads, buildings, or parking lots, even if covered by other land covers, such as grass or trees | 500 |
| Cropland | Fields used for growing and harvesting crops | 350 |
| Barren | Includes areas with bare soil year-round, such as sand or industrial fields | 150 |
| Forest | Any area predominantly covered in trees and not water | 100 |
| Water | Any area covered by water year-round | 200 |
| Forested Wetland | Any forested area that is at least periodically covered by water | 200 |
| Non-Forested Wetland | Areas that are at least periodically covered in water and contain grasses and other wetland plants | 150 |
| Shrubland | Areas covered in shrubs and without water | 100 |
| Habitat/Plant Community | Hydrology | Landscape Buffer |
|---|---|---|
| Mowing | Ditching | Development (residential) |
| Farmed | Channelized Streams | Development (commercial) |
| Grazing | Weir/Dam/Road | Sewage Disposal |
| Forest harvest | Stormwater Inputs | Septic Disposal |
| Cleared Land | Point Sources | Trails |
| Excessive Herbivory | Filling, Excavation | Roads |
| Invasive Species | Microtopographic Alteration | Landfill |
| Chemical Defoliation | Soil Subsidence | Agriculture (row crops) |
| Pine Conversion | Tidal Restriction | Agriculture (orchards) |
| Burned | Agriculture (poultry) | |
| Trails | Forest Harvest | |
| Garbage/Dumping | Marinas | |
| Increased Nutrients | Golf Course | |
| Roads | Mowed | |
| Sand/Gravel Mining |
| Classification Type | User’s Accuracy | Producer’s Accuracy | Overall Accuracy | Kappa |
|---|---|---|---|---|
| Landsat 8 and Sentinel-1 RF | 93.7% | 0.924 | ||
| Forest | 91.4% | 96.9% | ||
| Water | 98.5% | 100% | ||
| Built | 92.8% | 96.5% | ||
| Crop Fields | 90.4% | 94% | ||
| Barren | 91.8% | 84.9% | ||
| Non-Forested Wetland | 93.7% | 100% | ||
| Forested Wetland | 100% | 86.2% | ||
| Rangeland | 100% | 75.7% | ||
| Landsat 8 RF | 92.7% | 0.912 | ||
| Forest | 93.9% | 93.9% | ||
| Water | 98.5% | 100% | ||
| Built | 92.7% | 95.9% | ||
| Crop Fields | 86.2% | 93% | ||
| Barren | 91.4% | 81.1% | ||
| Non-Forested Wetland | 97.8% | 100% | ||
| Forested Wetland | 96.4% | 93.1% | ||
| Rangeland | 92% | 69.6% | ||
| Landsat 8 and Sentinel-1 SVM | 70% | 0.63 | ||
| Forest | 64.8% | 72.7% | ||
| Water | 100% | 91.3% | ||
| Built | 65.4% | 87.7% | ||
| Crop Fields | 71.8% | 78.2% | ||
| Barren | 58.3% | 26.4% | ||
| Non-Forested Wetland | 61.2% | 42.2% | ||
| Forested Wetland | 66.6% | 62% | ||
| Rangeland | 52.3% | 33.3% | ||
| Landsat 8 SVM | 79.4% | 0.752 | ||
| Forest | 84% | 63.6% | ||
| Water | 95.8% | 100% | ||
| Built | 83.6% | 83.6% | ||
| Crop Fields | 71.7% | 83.1% | ||
| Barren | 88% | 69.8% | ||
| Non-Forested Wetland | 88.8% | 88.8% | ||
| Forested Wetland | 54.7% | 79.3% | ||
| Rangeland | 40% | 24.2% |
| Geographic Region | Wetland Type | Area (sq.km) | Mean RAWSI | Standard Deviation RAWSI |
|---|---|---|---|---|
| Delaware | ||||
| All Wetlands | 1789.83 | 25.30 | 11.67 | |
| Open Water | 176.46 | 20.62 | 10.85 | |
| Forested | 1287.60 | 28.49 | 10.79 | |
| Non-Forested | 303.86 | 16.16 | 7.92 | |
| New Castle County | ||||
| All Wetlands | 357.55 | 19.17 | 7.83 | |
| Open Water | 21.83 | 8.89 | 5.23 | |
| Forested | 267.03 | 22.03 | 6.45 | |
| Non-Forested | 68.69 | 11.32 | 4.70 | |
| Kent County | ||||
| All Wetlands | 557.17 | 25.10 | 10.99 | |
| Open Water | 31.99 | 10.67 | 5.51 | |
| Forested | 388.31 | 30.59 | 7.93 | |
| Non-Forested | 136.87 | 12.89 | 4.83 | |
| Sussex County | ||||
| All Wetlands | 872.50 | 27.98 | 12.39 | |
| Open Water | 121.92 | 25.41 | 9.09 | |
| Forested | 631.00 | 29.95 | 12.57 | |
| Non-Forested | 119.58 | 20.15 | 10.67 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Walter, M.; Mondal, P. A Rapidly Assessed Wetland Stress Index (RAWSI) Using Landsat 8 and Sentinel-1 Radar Data. Remote Sens. 2019, 11, 2549. https://doi.org/10.3390/rs11212549
Walter M, Mondal P. A Rapidly Assessed Wetland Stress Index (RAWSI) Using Landsat 8 and Sentinel-1 Radar Data. Remote Sensing. 2019; 11(21):2549. https://doi.org/10.3390/rs11212549
Chicago/Turabian StyleWalter, Matthew, and Pinki Mondal. 2019. "A Rapidly Assessed Wetland Stress Index (RAWSI) Using Landsat 8 and Sentinel-1 Radar Data" Remote Sensing 11, no. 21: 2549. https://doi.org/10.3390/rs11212549
APA StyleWalter, M., & Mondal, P. (2019). A Rapidly Assessed Wetland Stress Index (RAWSI) Using Landsat 8 and Sentinel-1 Radar Data. Remote Sensing, 11(21), 2549. https://doi.org/10.3390/rs11212549